Область техники, к которой относится изобретение
Настоящее изобретение относится к способу регулирования дистанции при движении между основным (которое оснащено соответствующей системой регулирования дистанции при движении) транспортным средством и первым (движущимся впереди основного транспортного средства) транспортным средством, где основное транспортное средство движется с определенной скоростью и на упомянутой дистанции до первого транспортного средства и содержит систему регулирования дистанции при движении, приспособленную сохранять при движении дистанцию не менее, чем минимальная безопасная дистанция, и систему экономии топлива с функцией автоматического увеличения скорости, которая приводится в действие при выполнении определенного набора условий и автоматически увеличивает скорость движения, чтобы использовать собственную кинетическую энергию основного транспортного средства с целью экономии топлива.
Уровень техники
Системы экономии топлива в целом хорошо известны. В частности, системы экономии топлива могут распознавать ситуации, когда приемлемо увеличение скорости транспортного средства с целью экономии топлива за счет использования его собственной кинетической энергии. Чтобы определять, когда возникают такие ситуации, в системы экономии топлива могут быть включены системы изучения дороги впереди транспортного средства с целью учета данных уклона дороги при оперировании скоростью транспортного средства.
Уклон дороги может учитываться с использованием различных условий, заданных изготовителем транспортного средства. Например, в один из наборов условий может входить обнаружение спуска по склону впереди транспортного средства, когда его скорость может превысить установленную предельную скорость за счет среди прочего свободного хода. В другой набор условий может входить обнаружение подъема по склону впереди, когда скорость может быть увеличена до того, как достигнута вершина подъема. Вследствие этого транспортное средство приобретает дополнительную движущую силу на участке дороги, на котором такая дополнительная движущая сила является дешевой с точки зрения экономии топлива. После достижения вершины подъема дополнительная движущая сила используется, чтобы по меньшей мере до некоторой степени облегчить преодоления вершины подъема без чрезмерных усилий и чрезмерной потери скорости во время подъема.
Транспортные средства также могут оснащаться функциональными возможностями автоматического поддержания скорости, а с недавнего времени необязательного регулирования минимальной безопасной дистанции до транспортного средства, движущегося впереди рассматриваемого транспортного средства. Безопасная дистанция также может регулироваться с помощью системы, реализованной отдельно от системы автоматического поддержания скорости.
В отрасли постоянно прилагаются усилия по снижению расхода топлива. В основу настоящего изобретения положена задача дальнейшего снижения расхода топлива транспортными средствами, оснащенными такими системами, как описаны выше, или создания применимой альтернативы.
Раскрытие изобретения
Эта и другие задачи настоящего изобретения, а также его преимущества станут ясны из следующего далее описания в сочетании с прилагаемой формулой изобретения и чертежами.
Согласно одной из особенностей настоящего изобретения предложен способ регулирования дистанции при движении между основным транспортным средством и первым транспортным средством, движущимся впереди основного транспортного средства, которое движется с определенной скоростью и на упомянутой дистанции до первого транспортного средства. Основное транспортное средство содержит:
систему регулирования дистанции при движении, приспособленную для сохранения при движении дистанции не менее, чем минимальная безопасная дистанция, и
систему экономии топлива с функцией автоматического увеличения скорости, которая приводится в действие при выполнении определенного набора условий и автоматически увеличивает скорость движения, чтобы использовать собственную кинетическую энергию основного транспортного средства (H) с целью экономии топлива.
Способ включает шаги:
выборки (получения обратно) данных с целью подготовки к приведению в действие функции автоматического увеличения скорости,
подготовки к приведению в действие путем:
установки в качестве минимальной безопасной дистанции первой дистанции, при этом в случае меньшей дистанции при движении, чем первая дистанция, система регулирования дистанции при движении адаптирует скорость движения, пока не будет достигнута первая безопасная дистанция,
приведения в действие функции автоматического увеличения скорости только, когда дистанцией при движении является по меньшей мере первая дистанция, и после выборки данных о том, что упомянутый набор условий выполнен, и,
после приведения в действие функции автоматического увеличения скорости установки в качестве минимальной безопасной дистанции второй дистанции, меньшей, чем первая дистанция,
в результате чего разность между второй и первой дистанциями может использоваться при действующей функции увеличения скорости, чтобы автоматически увеличивать скорость без конфликта с системой регулирования дистанции при движении.
Способ согласно изобретению имеет целью снижение расхода топлива транспортным средством. Это достигается за счет усовершенствованного взаимодействия между системой экономии топлива и системой регулирования дистанции при движении. В противном случае обе системы могут мешать друг другу, при этом система регулирования дистанции при движении противодействует системе экономии топлива. Например, когда приведена в действие функция свободного хода системы экономии топлива, чтобы использовать собственную кинетическую энергию транспортного средства, между основным транспортным средством и первым или движущимся впереди транспортным средством может достигаться минимальная безопасная дистанция, предварительно заданная в системе регулирования дистанции при движении, которая снижает скорость транспортного средства, т.е. основного транспортного средства. Снижение скорости может достигаться несколькими способами, такими как использование тормозов транспортного средства, выключение функции свободного хода или иначе. В таких условиях уменьшается потенциальная возможность экономии топлива.
Вместо этого, при подготовке к приведению в действие функции увеличения скорости в настоящем изобретении устанавливается первая дистанция в качестве минимальной безопасной дистанции, используемой системой регулирования дистанции при движении. Кроме того, для приведения в действие (запуска) функции автоматического увеличения скорости задаются условия, согласно которым дистанцией при движении должна являться по меньшей мере первая дистанция, и должна осуществляться выборка данных о том, что выполнен набор условий автоматического увеличения скорости. Следовательно, в качестве минимальной безопасной дистанции, используемой системой регулирования дистанции при движении, устанавливается первая дистанция до того, как может быть приведена в действие функция автоматического увеличения скорости. Соответственно, скорость транспортного средства регулируется до приведения в действие функции автоматического увеличения скорости, пока не будет достигнута первая дистанция до первого транспортного средства.
После достижения первой дистанции разрешается привести в действие функции автоматического увеличения скорости, и, следовательно, она может быть приведена в действие, если выполнен набор условий. В набор условий преимущественно могут входить условия, определяемые автоматическими системами, соединенными с транспортным средством, но в один набор условий необязательно также может входить решение, принимаемое водителем.
После того, как приведена в действие функция автоматического увеличения скорости, в качестве минимальной безопасной дистанции устанавливается вторая дистанция, меньшая, чем первая дистанция. Иными словами, минимальная безопасная дистанция изменяется на величину разности между второй дистанцией и первой дистанцией. За счет этого обеспечивается достаточная дистанция (т.е. упомянутая разность) до первого транспортного средства для использования функции автоматического увеличения скорости транспортного средства без конфликта с системой регулирования дистанции при движении. Тем самым за счет использования собственной кинетической энергии транспортного средства может экономиться топливо.
Вторая дистанция преимущественно может устанавливаться таким образом, чтобы удовлетворять требованиям безопасности, таким как сохранение достаточной дистанции при движении, разделяющей основное транспортное средство и первое транспортное средство. Следовательно, для использования функции экономии топлива необязательно ставить под угрозу безопасность.
Транспортным средством (далее - автомобиль) согласно настоящему изобретению может являться одно из следующего: грузовой автомобиль или грузовик, пассажирский автомобиль или автобус или любой другой автомобиль, в котором применимы описанные способы. Термины "грузовой автомобиль" и "грузовик" означают автомобиль большой грузоподъемности любого размера и могут использоваться взаимозаменяемо. Система регулирования дистанции при движении и система экономии топлива могут быть объединены в единую систему, если это приемлемо. Дистанции, предусмотренные в настоящем изобретении, могут рассчитываться как дистанция, покрываемая за определенное время, или дистанция в единицах длины, если не указано иное. Дистанцией между двумя автомобилями может являться расстояние от переднего конца основного автомобиля до заднего конца первого автомобиля. Тем не менее, если это приемлемо, могут применяться альтернативы, такие как расстояние от переднего конца до переднего конца, в зависимости от систем отслеживания таких дистанций между рассматриваемыми автомобилями. Адаптация скорости основного автомобиля может достигаться несколькими способами, такими как свободный ход, уменьшение крутящего момента на валу двигателя, передаваемого колесам, и использование тормозов автомобиля в сочетании с функциональными возможностями восстановления энергии. Тем не менее, предпочтительно, если эта адаптация достигается с выгодой для расхода топлива. В набор условий для выполнения может входить одно или несколько условий, заданных изготовителем автомобиля, включая текущую скорость и ограничения текущей скорости, кривизну дороги как в горизонтальном, так и вертикальном направлениях и наличие условий, влияющих на общие характеристики управляемости автомобиля на дороге.
В некоторых вариантах осуществления системой экономии топлива может являться система с функцией, выбираемой пользователем. Иными словами, система экономии топлива может действовать не по умолчанию, а должна приводиться в действие пользователем. В этом случае система экономии топлива предпочтительно приводится в действие водителем. На практике это означает, что водитель, например, с помощью выделенной кнопки может выбрать, следует ли включить или выключить систему экономии топлива.
В других вариантах осуществления система экономии топлива может всегда действовать по умолчанию.
В некоторых вариантах осуществления данные о подготовке к приведению в действие функции автоматического увеличения скорости всегда доступны, когда действует система экономии топлива. Следовательно, такая подготовка происходит всякий раз, когда действует система экономии топлива, путем установки в качестве минимальной безопасной дистанции первой дистанции и путем определения того, что функция автоматического увеличения скорости допустима только, если дистанцией при движении является по меньшей мере первая дистанция.
Тем не менее, в предпочтительных вариантах осуществления данные о подготовке к приведению в действие функции автоматического увеличения скорости доступны только, когда действует система экономии топлива, а набор условий для приведения в действие функции автоматического увеличения скорости близок к выполнению или выполнен. Соответственно, в этом случае подготовка происходит только, когда по оценке системы приближается ситуация, в которой должна использоваться функция автоматического увеличения скорости. Например, в автомобиле с функцией наблюдения за кривизной дороги наличие спуска по склону впереди автомобиля может указывать на то, что набор условий близок к выполнению. Следовательно, при обнаружении спуска по склону впереди автомобиля может происходить подготовка к приведению в действие функции увеличения скорости, в результате чего дистанция до первого транспортного средства увеличится до первой дистанции. После достижения первой дистанции и при достижении автомобилем спуска по склону запускается функция автоматического увеличения скорости, и в качестве минимальной дистанции при движении устанавливается вторая дистанция, а разность между дистанциями может использоваться функцией увеличения скорости.
В системе регулирования дистанции при движении преимущественно предусмотрена предварительно заданная минимальная безопасная дистанция, а первая дистанция может быть задана путем суммирования корректирующей дистанции и предварительно заданной минимальной безопасной дистанции.
В этом случае вторая дистанция может быть преимущественно равна предварительно заданной минимальной безопасной дистанции, а корректирующая дистанция доступна при действующей функции увеличения скорости.
Преимуществом этого варианта является то, что водитель знает, что предварительно заданная минимальная безопасная дистанция никогда не сокращается. Во многих системах предварительно заданная минимальная безопасная дистанция может выбираться водителем и, следовательно, отображает его собственные требования.
В качестве альтернативы, в системе регулирования дистанции при движении предусмотрена предварительно заданная минимальная безопасная дистанция, а первая дистанция равна предварительно заданной минимальной безопасной дистанции.
В одном из вариантов осуществления разность между второй дистанцией и первой дистанцией, которой в некоторых вариантах осуществления является корректирующая дистанция, зависит от скорости движения. Следовательно, измененная безопасная дистанция также зависит от скорости движения.
Таким образом, уровень безопасности может адаптироваться в зависимости от скорости движения, например, среди прочего при движении с более низкой скоростью дистанция до движущегося впереди транспортного средства может быть сокращена путем установки более короткой корректирующей дистанции, но с поддержанием безопасности на оправданно высоком уровне.
В одном из вариантов осуществления основный автомобиль дополнительно содержит действующую систему автоматического поддержания скорости, при этом способ дополнительно включает движение с упомянутой скоростью под управлением действующей системы автоматического поддержания скорости.
В одном из вариантов осуществления основный автомобиль содержит средство свободного хода, позволяющее отсоединять двигательный агрегат от ведущих колес основного автомобиля, при этом шаг приведения в действие функции автоматического увеличения скорости включает запуск средства свободного хода.
В одном из вариантов осуществления шаг выборки данных о том, что набор условий выполнен или близок к выполнению, включает отслеживание выполнения набора условий и/или передачу данных о том, что набор условий выполнен.
Функциональные возможности отслеживания выполнения набора условий входят в саму систему экономии топлива, или ей сообщается о выполнении набора условий.
В одном из вариантов осуществления шаг адаптации скорости движения, пока не будет достигнута первая дистанция, включает:
отслеживание топографии предполагаемой дороги впереди основного автомобиля, и
выбор на протяжении отслеживаемой предполагаемой дороги положения для выполнения шага адаптации скорости движения, пока не будет достигнута измененная безопасная дистанция, в котором при выполнении упомянутого шага достигается благоприятный расход топлива основным автомобилем.
При этом отслеживаемая дорога впереди транспортного средства может отвечать набору условий, допускающих функцию автоматического увеличения скорости, но с отложенным приведением ее в действие. В способе согласно изобретению предусмотрен выбор положения для приведения в действие функции автоматического увеличения скорости, в котором достигается благоприятный расход топлива, т.е., возможно, еще более благоприятный расход топлива.
В одном из вариантов осуществления шаг отслеживания выполнения набора условий включает:
отслеживание топографии предполагаемой дороги впереди основного автомобиля, и
оценку того, содержит ли предполагаемая дорога подъем по склону, отвечающий набору условий с тем, чтобы разблокировать функцию автоматического увеличения скорости с целью увеличения скорости при движении вверх по склону и экономии топлива во время преодоления подъема.
Для преодоления подъема может требоваться большой расход топлива, который может быть снижен, если при приведении в действие функции автоматического увеличения скорости в способе согласно изобретению будут учитываться такие подъемы по склону. В одном из вариантов осуществления шаг отслеживания топографии предполагаемой дороги впереди основного автомобиля включает использование системы глобального позиционирования (GPS).
В одном из вариантов осуществления шаг отслеживания выполнения набора условий включает:
отслеживание топографии предполагаемой дороги впереди основного автомобиля с помощью системы глобального позиционирования (GPS), и
расчет того, выполняется ли набор условий на протяжении предполагаемой дороги.
В одном из вариантов осуществления шаг адаптации скорости движения, пока не будет достигнута первая дистанция, и/или отслеживания выполнения набора условий включает оценку поведения первого автомобиля в ближайшем будущем, предпочтительно путем оценки соотношения его массы и мощности.
Путем принятия в расчет поведения первого автомобиля в ближайшем будущем или по меньшей мере попытки принять в расчет такое поведение может достигаться еще большее снижение расхода топлива. Путем оценки, например, соотношения массы и мощности первого автомобиля можно по меньшей мере до определенной степени прогнозировать режим его движения по предполагаемой впереди дороге, например, вероятность снижения скорости первого автомобиля. Могут быть предусмотрены другие параметры прогнозирования, такие как тип автомобиля или манера вождения водителя первого автомобиля.
В одном из вариантов осуществления отслеживание топографии предполагаемой дороги и/или оценка поведения первого автомобиля в ближайшем будущем используется в качестве входных данных при выборе разности между второй и первой дистанциями с тем, чтобы адаптировать эту разность к расчетной будущей ситуации.
В одном из вариантов осуществления шаг адаптации скорости движения, пока не будет достигнута измененная безопасная дистанция, включает автоматическое уменьшение мощности, подаваемой на ведущие колеса.
Краткое описание чертежей
Изобретение будет более подробно описано далее со ссылкой на варианты его осуществления и прилагаемые чертежи. На чертежах:
на фиг. 1а-1в показано схематическое представление основного автомобиля и движущегося впереди автомобиля в одном из вариантов осуществления способа согласно настоящему изобретению,
на фиг. 2 - блок-схема одного из вариантов осуществления способа согласно настоящему изобретению.
Подробное описание вариантов осуществления
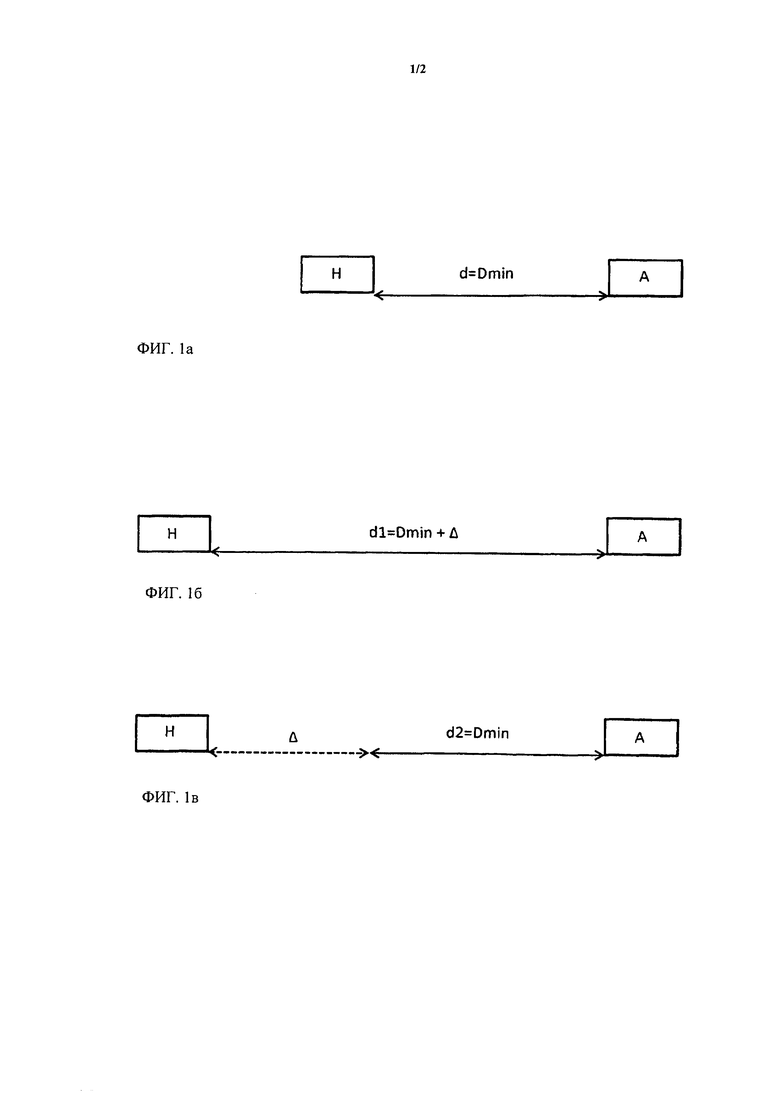
В настоящем изобретении предложены способ и система регулирования дистанции при движении между основным автомобилем H и автомобилем A, движущимся впереди основного автомобиля H. Движущийся впереди автомобиль A является одним из вариантов осуществления первого транспортного средства A согласно формуле изобретения. Движущимся впереди автомобилем A является автомобиль, который движется непосредственно впереди основного автомобиля H. Оба автомобиля A и H движутся в направлении вправо на фиг. 1а-1в. Расстояние между задним концом движущегося впереди автомобиля A и передним концом основного автомобиля H называется дистанцией d при движении. Каждый автомобиль движется с собственной скоростью, которая может быть вручную задана соответствующим водителем или может регулироваться системой автоматического поддержания скорости, которой оснащены автомобили. В этом отношении изобретение не ограничено какой-либо конкретной ситуацией. Следовательно, дистанция d при движении может являться постоянной или непрерывно изменяющейся.
В одном из предпочтительных вариантов осуществления настоящего изобретения основной автомобиль H оснащен системой автоматического поддержания скорости, системой экономии топлива и системой регулирования дистанции при движении. Все эти системы могут входить в единую общую систему, предпочтительно систему автоматического поддержания скорости. Тем не менее, система автоматического поддержания скорости является необязательной.
В системе регулирования дистанции при движении основного автомобиля Н предусмотрена предварительно заданная минимальная безопасная дистанция Dмин, измеряемая в секундах или метрах. При измерении в секундах типичная предварительно заданная минимальная безопасная дистанция Dмин составляет 2 секунды. Если основной автомобиль H догоняет движущийся впереди автомобиль A, система регулирования дистанции основного автомобиля H убеждается в том, что два автомобиля всегда разделены по меньшей мере дистанцией d, большей, чем Dмин.
Система экономии топлива основного автомобиля H оснащена функцией автоматического увеличения скорости. Эта функция автоматического увеличения скорости может представлять собой функцию свободного хода или функцию упреждающего увеличения скорости или их сочетание. Функция свободного хода позволяет основному автомобилю H увеличивать скорость, например, за счет свободного хода путем отсоединения двигателя от ведущих колес с тем, чтобы уменьшилось внутреннее трение основного автомобиля H. Энергия, теряемая на трение, по меньшей мере до определенной степени может использоваться как кинетическая энергия. Такие функциональные возможности свободного хода могут быть реализованы в виде отдельного блока свободного хода или могут предусматривать использование средств, которыми уже оснащен стандартно оборудованный автомобиль, таких как средства отсоединения колес автомобиля от трансмиссии посредством сцепления в коробке передач. Это может делаться при спуске по склону или в любых других условиях, в которых существует возможность использовать собственную кинетическую энергию автомобиля с целью снижения расхода топлива. Функция упреждающего увеличения скорости позволяет основному автомобилю H заблаговременно увеличивать скорость, например, перед подъемом по склону с тем, чтобы "запасти" скорость или иначе кинетическую энергию, которая облегчает преодоление подъема. Скорость последовательно увеличивается в положении, в котором это увеличение достигается с меньшими затратами топлива, чем во время преодоления подъема. Тем самым снижается расход топлива. В соответствии с изобретением не требуется увеличивать скорость с использованием функции упреждающего увеличения скорости, чтобы полностью преодолеть подъем по склону. Достаточно лишь небольшого увеличения. Могут быть предусмотрены другие функции автоматического увеличения скорости, входящие в объем притязаний.
Система экономии топлива может приводиться в действие водителем основного автомобиля H, когда он узнает о будущей ситуации, в которой была бы выгодна функция автоматического увеличения скорости. Она может приводиться в действие среди прочего путем нажатия на выделенную кнопку и т.п. В качестве альтернативы и более предпочтительно система экономии топлива может быть оснащена функциональными возможностями автоматизированного слежения за дорогой, такими как система глобального позиционирования (GPS), которая следит за дорогой впереди основного автомобиля H и может определять, когда действует, или когда не действует система экономии топлива, и необязательно сообщать об этом водителю основного автомобиля.
Каждая функция автоматического увеличения скорости сопровождается набором условий, выполнение которых позволяет приводить ее в действие. В каждый набор условий входит, например, расстояние до уклона, характер уклона, т.е. является ли он спуском или подъемом по склону, и насколько крутым он является, длина уклона и т.д. В рассматриваемом варианте осуществления GPS постоянно следит за дорогой впереди основного автомобиля H. Если набор условий близок к выполнению, выполняется подготовка к приведению в действие соответствующей функции автоматического увеличения скорости.
В одном из примеров осуществления в системе регулирования дистанции при движении между основным автомобилем и первым автомобилем, движущимся впереди основного автомобиля предусмотрена предварительно заданная минимальная безопасная дистанция Dмин. В рассматриваемом примере устанавливается вторая дистанция, равное предварительно заданной минимальной безопасной дистанции Dмин в системе регулирования дистанции при движении. Следовательно, автомобили никогда не сблизятся на дистанцию, меньшую, чем предварительно заданная минимальная безопасная дистанция, даже при действующей функции увеличения скорости. Чтобы определить первую дистанцию, увеличивают предварительно заданную минимальную безопасную дистанцию Dмин на имеющую положительную величину корректирующую дистанцию Δ, и получают первую дистанцию d1, превышающую начальную предварительно заданную минимальную безопасную дистанцию Dмин. Корректирующая дистанция Δ предпочтительно измеряется в тех же единицах, что и предварительно заданная минимальная безопасная дистанция Dмин. Например, когда предварительно заданная минимальная безопасная дистанция Dмин измеряется в секундах и составляет 2 секунды, корректирующая дистанция Δ может составлять 1 секунду, при этом первая безопасная дистанция составляет 3 секунды. Следовательно:

В этом случае, если текущая дистанция d при движении основного автомобиля H является меньшей, чем первая безопасная дистанция d1, система регулирования дистанции при движении изменяет текущую скорость движения основного автомобиля H таким образом, чтобы текущая дистанция d при движении превышала первую безопасную дистанцию d1 или по меньшей мере равнялась ей. Следовательно:

Иными словами, дистанция до движущегося впереди автомобиля A увеличивается. После этого подготовка завершается, и функция автоматического увеличения скорости может быть приведена в действие при условии действительного выполнения предусмотренного набора условий.
Функция увеличения скорости может приводиться в действие вручную водителем после получения разрешения от системы, или предпочтительно система может автоматически приводить ее действие. Это может дополнительно обусловлено условием выполнения одного или нескольких требований до приведения в действие. Они будут дополнительно пояснены далее. После приведения в действие функции автоматического увеличения скорости в качестве безопасной дистанции устанавливается вторая дистанция, что в данном случае означает, что в качестве безопасной дистанции снова устанавливается предварительно заданная минимальная безопасная дистанция Dмин. Следовательно:

За счет этого основной автомобиль H снова может приблизиться к движущемуся впереди автомобилю A, но не ближе, чем на предварительно заданную минимальную безопасную дистанцию Dмин. Это означает, что основной автомобиль H может использовать интервал дистанций d1-Dмин, соответствующий корректирующей дистанции Δ, для использования функции автоматического увеличения скорости без помех со стороны движущегося впереди автомобиля A, чтобы приблизиться к нему сзади. По меньшей мере любая такая помеха должна быть сведена к минимуму, а частота их возникновения максимально снижена, что приводит к выбору достаточно большой корректирующей дистанции Δ, но одновременно не настолько большой, чтобы тратить лишнее время, пока не будет разрешено привести в действие функцию автоматического увеличения скорости.
На фиг. 1а проиллюстрирована ситуация, когда основной автомобиль H движется на предварительно заданной минимальной безопасной дистанции Dмин сзади первого автомобиля A. В этом варианте осуществления дистанция при движении равна d=Dмин. Затем после выборки данных о необходимости подготовки к приведению в действие функции автоматического увеличения скорости осуществляется подготовка путем установки в качестве минимальной безопасной дистанции первой дистанции d1, которая в этом случае равна Dмин + корректирующая дистанция Δ. В результате этого система регулирования дистанции при движении будет действовать до наступления ситуации, проиллюстрированной на фиг. 1б, а именно, когда дистанция между основным автомобилем H и первым автомобилем A будет действительно равна Dмин+Δ. После этого может быть разрешена функция автоматического увеличения скорости (если также может быть осуществлена выборка данных о том, что набор условий выполнен). Когда разрешена функция автоматического увеличения скорости, в качестве минимальной безопасной дистанцию устанавливается вторая дистанция d2, которая в этом случае равна Dмин. Это значит, что на протяжении действия функции увеличения скорости будет доступна корректирующая дистанция Δ, как указано пунктирной линией на фиг. 1в.
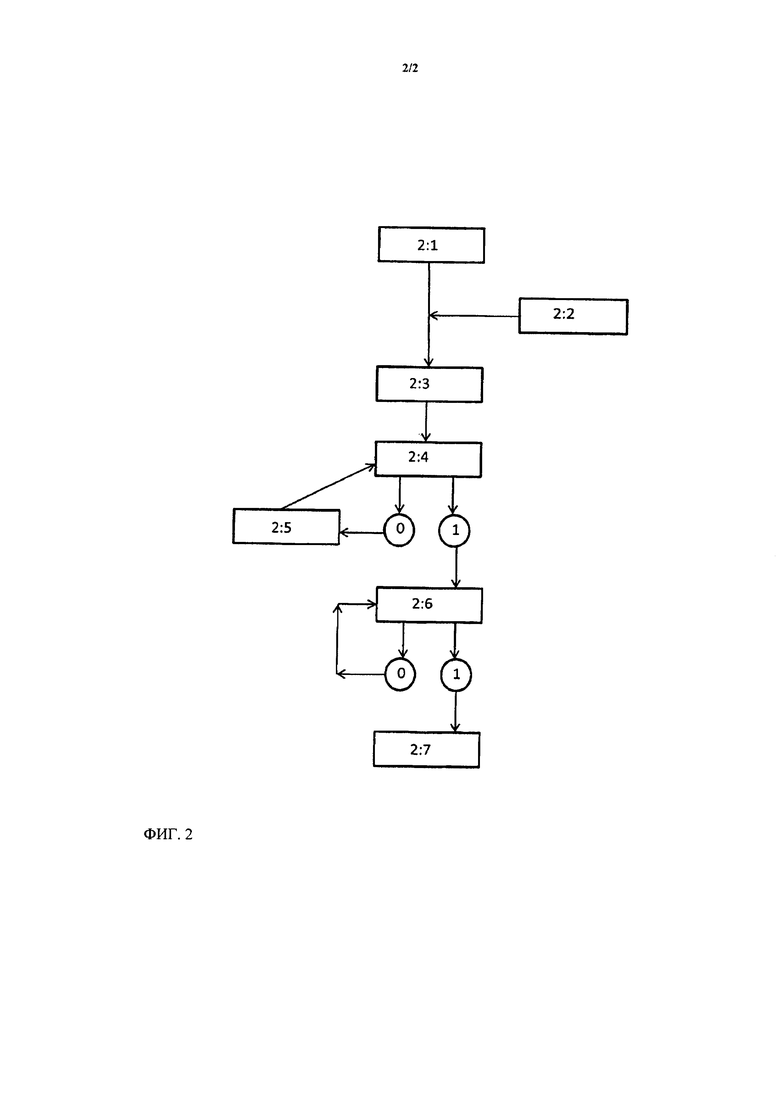
На фиг. 2 показана блок-схема, иллюстрирующая один из вариантов осуществления изобретения. Блоками на блок-схеме обозначено следующее:
2:1 - дорожная ситуация, когда фактическая дистанция при движении между основным автомобилем и первым транспортным средством может регулироваться системой регулирования дистанции при движении;
2:2 - поступающая команда подготовки к приведению в действие функции автоматического увеличения скорости;
2:3 - установка первой дистанции d1 в качестве минимальной безопасной дистанции d в системе регулирования дистанции при движении;
2:4 - действительная дистанция при движении между основным автомобилем и первым транспортным средством >=d1?
1 означает да, 0 означает нет;
2:5 - адаптация дистанции при движении посредством системы регулирования дистанции при движении;
2:6 - выполнены ли условия приведения в действие функции автоматического увеличения скорости?
1 означает да, 0 означает нет;
2:7 - установка второй дистанции d2 (меньшей, чем d1) в качестве минимальной безопасной дистанции и приведение в действие функции автоматического увеличения скорости.
В одном из альтернативных примеров осуществления первая дистанция может соответствовать предварительно заданной минимальной дистанции Dмин. В таком случае вторая дистанция d2, меньшая, чем первая дистанция, будет меньше, чем предварительно заданная минимальная безопасная дистанция Dмин. Соответственно, основному автомобилю разрешается приблизиться к движущемуся впереди автомобилю на меньшее расстояние, чем предварительно заданная минимальная безопасная дистанция. Тем не менее, до движущегося впереди автомобиля A сохраняется минимальная дистанция, не позволяющая основному автомобилю H чрезмерно приближаться к движущемуся впереди автомобилю A, и по-прежнему предусмотрен интервал Δ дистанций, соответствующий разности между первой дистанцией и второй дистанцией, в котором основной автомобиль H может использовать собственную кинетическую энергию с целью экономии топлива. Преимуществом первой дистанции, соответствующей предварительно заданной минимальной дистанции в способе согласно изобретению, является возможность почти немедленно разрешать приводить в действие функцию автоматического увеличения скорости после генерирования измененной безопасной дистанции Dизмененная, поскольку к этому моменту основной автомобиль H уже должен двигаться с соблюдением дистанции d, большей, чем предварительно заданная минимальная безопасная дистанция Dмин, или равной ей.
В других вариантах осуществления изобретении первая и вторая дистанции могут выбираться независимо от предварительно заданной минимальной безопасной дистанции Dмин в системе регулирования дистанции при движении.
Следует отметить, что, когда основной автомобиль H оснащен как системой автоматического поддержания скорости, так и системой экономии топлива, функция автоматического увеличения скорости может позволять автомобилю H увеличивать скорость сверх максимальной скорости, установленной системой автоматического поддержания скорости. Может быть установлен допустимый предел превышения заданной максимальной скорости с учетом как ограничений скорости на дороге, так и ощущения безопасности водителем.
В одном из предпочтительных вариантов осуществления настоящего изобретения приведение в действие функции автоматического увеличения скорости сопровождается условием не приводить ее в действие до выполнения этого условия. Такое условие гласит, что для приведения в действие функции автоматического увеличения скорости должен быть выполнен не только набор условий, но также путем отслеживания предполагаемой дороги впереди основного автомобиля H должно быть установлено, что протяженность участка предполагаемой дороги, на котором выполняется набор условий, превышает заданную дистанцию. Этим способом достигается максимальное использование потенциала функции автоматического увеличения скорости. Другое условие может предусматривать расчет на основании отслеживаемой предполагаемой дороги оптимального исходного положения для приведения в действие с достижением максимального снижения расхода топлива.
Кроме того, корректирующая дистанция Δ, то есть разность между первой дистанцией и второй дистанцией может являться не только фиксированной величиной, но также величиной, зависящей от скорости движения основного автомобиля H. Следовательно:

При движении с меньшей скоростью может допускаться меньшая дистанция до движущегося впереди автомобиля A, или при движении с очень высокой скоростью может требоваться увеличенная дистанция. Это может достигаться путем изменения корректирующей дистанции Δ на основании скорости движения.
С целью дополнительного усовершенствования способа и системы согласно изобретению предпочтительно, чтобы мог отслеживаться движущийся впереди автомобиль A, и могло рассчитываться или оцениваться его будущее поведение на дороге. Одним из способов является оценка соотношения массы и мощности движущегося впереди автомобиля A с целью прогнозирования снижения скорости, в результате чего сокращается дистанция при движении между двумя автомобилями. Другим способов является отслеживание дороги впереди движущегося впереди автомобиля A с целью обнаружения пробок на дороге, что также влечет снижение скорости движущегося впереди автомобиля A.
Настоящее изобретение не ограничено раскрытыми выше и описанными вариантами осуществления. Напротив, в изобретение может быть внесен ряд изменений, не выходящих за пределы объема притязаний. Такие изменения могут включать применение внешних средств отслеживания предполагаемой дороги впереди основного автомобиля H. В таком случае предполагаемая дорога отслеживается не в самом способе и системе согласно изобретению, а на основании данных, извлекаемых из внешней системы отслеживания. Поскольку в настоящее время на рынке предлагается множество различных систем позиционирования, функциональные возможности которых постоянно развиваются, изготовителю системы согласно изобретению было бы целесообразно приобрести такую систему у стороннего производителя, и предусмотреть в способе и системе согласно изобретению лишь функциональные возможности выборки данных и расчета.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления движением автомобильной техники в составе колонны с учетом состояния опорной поверхности, рельефа и кривизны маршрута | 2022 |
|
RU2790889C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ВОЕННОЙ АВТОМОБИЛЬНОЙ ТЕХНИКИ В СОСТАВЕ КОЛОННЫ С УЧЁТОМ СОСТОЯНИЯ ОПОРНОЙ ПОВЕРХНОСТИ | 2020 |
|
RU2746046C2 |
| СПОСОБ ФОРМИРОВАНИЯ И СНАБЖЕНИЯ ЭЛЕКТРОЭНЕРГИЕЙ ПОЕЗДОВ ИЗ НАЗЕМНЫХ ТРАНСПОРТНЫХ СРЕДСТВ С ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2569205C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО С СИСТЕМОЙ ИДЕНТИФИКАЦИИ | 2009 |
|
RU2531115C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДИСТАНЦИИ ТРАНСПОРТНОГО СРЕДСТВА ДО ВПЕРЕДИ ИДУЩЕГО ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2662105C2 |
| СПОСОБ ФОРМИРОВАНИЯ АВТОКОЛОННЫ ИЗ ГРУЗОВЫХ АВТОМОБИЛЕЙ БОЛЬШОЙ ГРУЗОПОДЪЕМНОСТИ | 2017 |
|
RU2716526C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОКАЗАНИЯ ПОДДЕРЖКИ ВОДИТЕЛЮ ТРАНСПОРТНОГО СРЕДСТВА, В ЧАСТНОСТИ АВТОМОБИЛЯ ПРОМЫШЛЕННОГО НАЗНАЧЕНИЯ | 2016 |
|
RU2712481C2 |
| БЕСПИЛОТНОЕ ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ УПРАВЛЕНИЯ ЕГО ДВИЖЕНИЕМ | 2022 |
|
RU2809334C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ АВТОМОБИЛЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2625213C2 |
| СПОСОБ И СИСТЕМА (ВАРИАНТЫ) КРУИЗ-КОНТРОЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2719122C2 |
Предложен способ регулирования дистанции при движении между основным транспортным средством (H) и первым транспортным средством (A), движущимся впереди основного транспортного средства (H), которое движется с определенной скоростью и на упомянутой дистанции до первого транспортного средства (A). Основное транспортное средство (H) содержит систему регулирования дистанции при движении и систему экономии топлива. Система регулирования дистанции при движении приспособлена сохранять при движении дистанцию не менее, чем минимальная безопасная дистанция. Система экономии топлива содержит функцию автоматического увеличения скорости, которая в случае выполнения набора условий автоматически увеличивает скорость движения, чтобы использовать собственную кинетическую энергию основного транспортного средства (H) с целью экономии топлива. Способ включает шаги: выборки данных о том, что набор условий выполнен и разрешено приведение в действие функции автоматического увеличения скорости, генерирования измененной безопасной дистанции путем изменения заданной безопасной дистанции на корректирующую дистанцию и, если дистанция при движении является меньшей, чем измененная безопасная дистанция, адаптации скорости движения, пока не будет достигнута измененная безопасная дистанция, после чего может быть разрешено приведение в действие функции автоматического увеличения скорости, и после приведения ее в действие переустановку предварительно заданной минимальной безопасной дистанции с тем, чтобы корректирующая дистанция была доступна во время действия функции увеличения скорости. Предложена также система для регулирования дистанции. Достигается снижение расхода топлива. 2 н. и 18 з.п. ф-лы, 2 ил.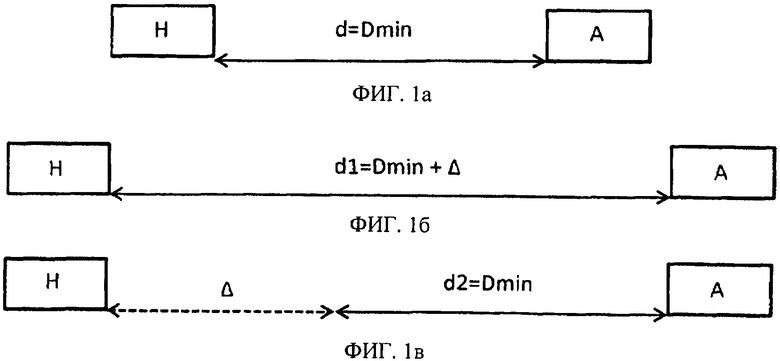
1. Способ регулирования дистанции при движении между основным транспортным средством (Н) и первым транспортным средством (А), движущимся впереди основного транспортного средства (Н), которое движется с определенной скоростью и на упомянутой дистанции до первого транспортного средства (А) и содержит:
систему регулирования дистанции при движении, приспособленную для сохранения при движении дистанции не менее, чем минимальная безопасная дистанция, и
систему экономии топлива с функцией автоматического увеличения скорости, которая приводится в действие при выполнении определенного набора условий и автоматически увеличивает скорость движения, чтобы использовать собственную кинетическую энергию основного транспортного средства (Н) с целью экономии топлива, при этом способ включает шаги:
выборки данных с целью подготовки к приведению в действие функции автоматического увеличения скорости,
подготовки к приведению в действие путем: установки в качестве минимальной безопасной дистанции первой дистанции, при этом в случае меньшей дистанции при движении, чем первая дистанция, система регулирования дистанции при движении адаптирует скорость движения, пока не будет достигнута первая безопасная дистанция, и приведения в действие функции автоматического увеличения скорости только, когда дистанцией при движении является, по меньшей мере, первая дистанция, и после выборки данных о том, что упомянутый набор условий выполнен, и
после приведения в действие функции автоматического увеличения скорости, установки в качестве минимальной безопасной дистанции второй дистанции, меньшей, чем первая дистанция,
так что разность между второй и первой дистанциями может использоваться при действующей функции увеличения скорости, чтобы автоматически увеличивать скорость без конфликта с системой регулирования дистанции при движении.
2. Способ по п. 1, в котором система экономии топлива приводится в действие выборочно, предпочтительно путем приведения в действие водителем.
3. Способ по п. 1 или 2, в котором выборка данных для подготовки к приведению в действие функции автоматического увеличения скорости всегда выполняется, когда действует система экономии топлива.
4. Способ по п. 1 или 2, в котором выборка данных для подготовки к приведению в действие функции автоматического увеличения скорости выполняется только, когда действует система экономии топлива, а набор условий близок к выполнению или выполнен.
5. Способ по п. 1, в котором
в системе регулирования дистанции при движении предусмотрена предварительно заданная минимальная безопасная дистанция, и
первую дистанцию устанавливают путем суммирования корректирующей дистанции и предварительно заданной минимальной безопасной дистанции.
6. Способ по п. 5, в котором вторая дистанция равна предварительно заданной минимальной безопасной дистанции, при этом корректирующая дистанция доступна во время действия функции увеличения скорости.
7. Способ по п. 1, в котором в системе регулирования дистанции при движении предусмотрена предварительно заданная минимальная безопасная дистанция, и первая дистанция равна предварительно заданной минимальной безопасной дистанции.
8. Способ по п. 1, в котором разность между второй дистанцией и первой дистанцией зависит от скорости движения.
9. Способ по п. 1, в котором основное транспортное средство (Н) дополнительно содержит действующую систему автоматического поддержания скорости, при этом способ дополнительно включает движение с упомянутой скоростью под управлением действующей системы автоматического поддержания скорости.
10. Способ по п. 1, в котором основное транспортное средство (Н) содержит средство свободного хода, с помощью которого двигательный агрегат может отсоединяться от ведущих колес основного транспортного средства (Н), при этом шаг приведения в действие функции автоматического увеличения скорости включает запуск средства свободного хода.
11. Способ по п. 1, в котором шаг выборки данных о том, что набор условий выполнен или близок к выполнению, включает:
отслеживание того, выполнен ли или близок к выполнению набор условий, и/или
передачу данных о том, что набор условий выполнен или близок к выполнению.
12. Способ по п. 11, в котором шаг отслеживания того, близок ли к выполнению набор условий, включает:
отслеживание топографии предполагаемой дороги впереди основного транспортного средства (Н), и
определение того, будет ли выполнен набор условий на протяжении отслеживаемой предполагаемой дороги.
13. Способ по п. 12, в котором шаг адаптации скорости движения, пока не будет достигнута первая дистанция, включает:
отслеживание топографии предполагаемой дороги впереди основного транспортного средства, и
выбор на протяжении отслеживаемой предполагаемой дороги положения для выполнения шага адаптации скорости движения, пока не будет достигнута первая безопасная дистанция, при котором достигается благоприятный расход топлива основным транспортным средством.
14. Способ по п. 12 или 13, в котором шаг отслеживания того, выполнен ли или близок к выполнению набор условий, включает:
отслеживание топографии предполагаемой дороги впереди основного транспортного средства (Н), и
оценку того, содержит ли предполагаемая дорога подъем по склону, отвечающий набору условий,
при этом задействуется функция автоматического увеличения скорости для увеличения скорости транспортного средства при движении вверх по склону.
15. Способ по п. 12, в котором шаг отслеживания топографии предполагаемой дороги впереди основного транспортного средства (Н) включает использование системы глобального позиционирования (GPS).
16. Способ по п. 1, в котором шаг отслеживания набора условий включает:
отслеживание топографии предполагаемой дороги впереди основного транспортного средства (Н) с помощью системы глобального позиционирования (GPS), и
расчет того, выполнен ли набор условий на протяжении предполагаемой дороги.
17. Способ по п. 1, в котором шаг адаптации скорости движения, пока не будет достигнута первая дистанция, и/или шаг отслеживания того, выполнен ли набор условий, включает оценку поведения первого транспортного средства (А) в ближайшем будущем, предпочтительно путем расчета соотношения его массы и мощности.
18. Способ по п. 12, в котором отслеживание топографии предполагаемой дороги и/или оценка поведения первого автомобиля в ближайшем будущем используется в качестве входных данных при выборе разности между второй и первой дистанциями так, чтобы адаптировать разность к расчетной будущей ситуации.
19. Способ по п. 1, в котором шаг адаптации скорости движения, пока не будет достигнута первая дистанция, включает автоматическое уменьшение мощности, подаваемой на ведущие колеса.
20. Система для регулирования дистанции при движении между основным транспортным средством (Н), которое оснащено ею, и первым транспортным средством (А), движущимся впереди основного транспортного средства (Н), которое движется с определенной скоростью и на упомянутой дистанции до первого транспортного средства (А) и содержит, кроме системы регулирования дистанции при движении, приспособленной для сохранения при движении дистанции не менее, чем минимальная безопасная дистанция, также систему экономии топлива с функцией автоматического увеличения скорости, которая приводится в действие при выполнении определенного набора условий и автоматически увеличивает скорость движения, чтобы использовать собственную кинетическую энергию основного транспортного средства (Н) с целью экономии топлива,
причем система для регулирования дистанции при движении выполнена с возможностью:
выборки данных для подготовки к приведению в действие функции автоматического увеличения скорости,
подготовки к приведению в действие путем установки в качестве минимальной безопасной дистанции первой дистанции, при этом в случае меньшей дистанции при движении, чем первая дистанция, система регулирования дистанции при движении адаптирует скорость движения, пока не будет достигнута первая безопасная дистанция, и приведения в действие функции автоматического увеличения скорости только, когда дистанцией при движении является, по меньшей мере, первая дистанция, и после выборки данных о том, что упомянутый набор условий выполнен, и
после приведения в действие функции автоматического увеличения скорости установки в качестве минимальной безопасной дистанции второй дистанции, меньшей, чем первая дистанция,
так что разность между второй и первой дистанциями может использоваться при действующей функции увеличения скорости, чтобы
автоматически увеличивать скорость без конфликта с системой регулирования дистанции при движении.
| DE102004017115A1, 27.10.2005 | |||
| Устройство автоматическогоОбЕСпЕчЕНия бЕзОпАСНОй диСТАН-ции МЕжду дВижущиМиСя ТРАНСпОРТ-НыМи СРЕдСТВАМи | 1976 |
|
SU794575A1 |
| Устройство для предотвращения столкновения движущихся объектов | 1973 |
|
SU553558A1 |

