Изобретение относится к вибрационной технике, а именно к инерционным конвейерам, и может быть использовано для транспортирования сыпучих материалов в различных отраслях промышленности.
Известен инерционный конвейер, содержащий лоток с транспортирующей поверхностью, установленный на основании на роликах с возможностью взаимодействия с упругими упорами, расположенными на основании, вибропривод в виде закрепленного на основании индуктора линейного асинхронного электродвигателя и ротора, установленного на лотке, и блок управления виброприводом, связанный с датчиками положения лотка [1].
Недостатками технического решения являются небольшая производительность конвейера и большие энергетические затраты из-за длительных пусковых токов электропривода.
Наиболее близким к предлагаемому техническому решению является инерционный конвейер, содержащий лоток с транспортирующей поверхностью, установленный на основании на роликах с возможностью взаимодействия с упругими упорами, расположенными на основании, вибропривод в виде закрепленного на основании индуктора линейного асинхронного двигателя и ротора, установленного в направляющих с возможностью нормального перемещения по отношению к транспортирующей поверхности лотка на упругих элементах, блок управления виброприводом, связанный с датчиками положения лотка [2].
Недостатком данного технического решения являются большие энергетические затраты из-за длительных пусковых токов электропривода.
Цель изобретения - уменьшение энергетических затрат при повышении производительности инерционного конвейера.
Технический результат достигается тем, что на роторе жестко установлен кронштейн с возможностью возвратно-поступательного перемещения параллельно транспортирующей поверхности лотка между дополнительно установленными упругими элементами.
Существенным отличием данного технического решения является наличие возможности ротора, кроме нормального перемещения по отношению к транспортирующей поверхности лотка, дополнительного возвратно-поступательного перемещения параллельно его транспортирующей поверхности. Предложенное техническое решение позволяет уменьшить длительность пусковых токов, так как электромагнитные силы прикладываются к ротору, затем ротор, как промежуточный элемент с меньшей массой, начинает свое движение и в последующем увлекает лоток, взаимодействуя с последним через дополнительно установленные упругие элементы. После выключения электрической машины привода ротор, кроме нормального импульса силы к лотку, прикладывает дополнительный импульс силы в направлении, противоположном транспортированию, что увеличивает эффект проскальзывания груза относительно лотка. В итоге повышается производительность, уменьшаются энергетические затраты.
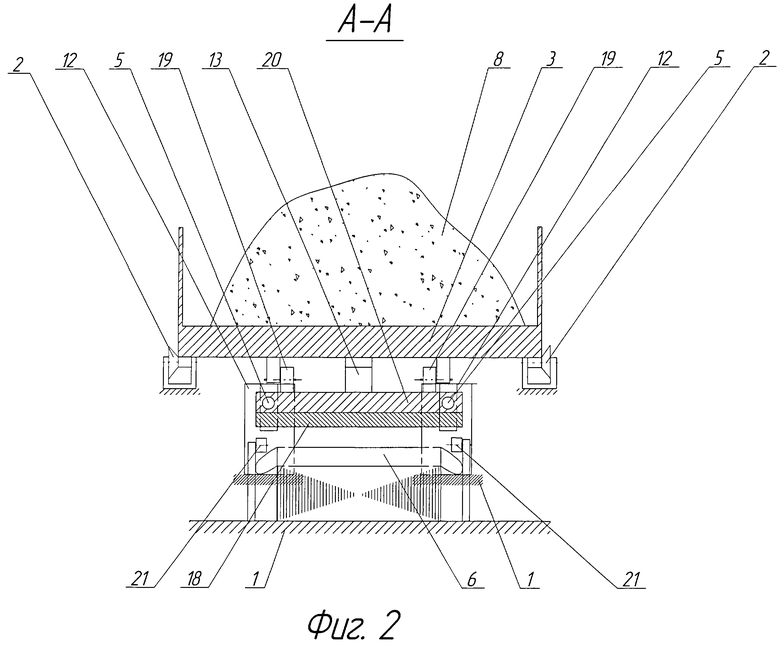
На фиг.1 показан общий вид предлагаемого конвейера; на фиг.2 - разрез А-А на фиг.1.
Инерционный конвейер содержит установленный на основании 1 на роликах 2 лоток 3 жесткой конструкции (фиг.1). На лотке 3 с транспортируемым материалом 8 со стороны, обращенной к индуктору 6, на направляющих 5 с возможностью возвратно-поступательного перемещения установлен ротор 7 линейного асинхронного двигателя. Ротор выполнен в виде двух пластин 18 и 20, жестко соединенных межу собой, например, заклепками (фиг.1 и фиг.2). Пластина 18 выполнена из неферромагнитного материала с большой электропроводностью, например, медь или алюминий, а пластина 20 - из ферромагнитного материала. Ротор 7 имеет длину большую, чем длина индуктора 6 на величину хода лотка 3. На лотке 3 выполнены выступы 4 и 13, взаимодействующие с упругими упорами 14 и 26, закрепленными на основании 1. Упругие упоры 14 и 26 выполнены в виде пружин сжатия. На основании 1 закреплены стаканы 12. В стаканах 12 установлены упругие элементы 17. На концах направляющих 5 установлены ролики 16, предназначенные для свободного перемещения направляющих относительно стаканов 12. На роторе 7 между упругими элементами 9 и 11, жестко закрепленными на лотке на кронштейнах 23 и 22 соответственно, жестко установлен кронштейн 10. Возле индуктора 6 с обеих сторон установлены ролики 21. Индуктор 6 подключается к сети трехфазного переменного тока через блок управления 24. Около упругих упоров 14 и 26 установлены датчики 15 и 25 положения лотка, электрически соединенные с блоком управления 24.
Инерционный конвейер работает следующим образом.
Блок управления 24 подключает обмотки индуктора 6 к сети трехфазного переменного тока. Индуктор 6 создает бегущее магнитное поле, при этом в роторе 7 индуцируется электродвижущая сила, которая создает электрический ток. При взаимодействии бегущего магнитного поля индуктора и электрического тока возникает нормальная составляющая электромагнитной силы между индуктором 6 и ротором 7, прижимающая ротор 7 к индуктору 6. При этом упругие элементы 17 направляющими 5 сжимаются, а ротор 7 ложится на ролики 21, которые обеспечивают минимальный необходимый зазор между индуктором 6 и ротором 7. Одновременно с этим продольная составляющая электромагнитной силы приводит в движение ротор 7 в направлении бегущего магнитного поля, например, слева направо (фиг.1). Ротор 7 двигается на направляющих 5 на роликах 21 относительно индуктора 6 и лотка 3, т.к. масса ротора 7 во много раз меньше массы лотка 3. Ротор 7, благодаря кронштейну 10, начинает сжимать упругий элемент 11. По мере сжатия упругого элемента 11 возрастает его сила сопротивления, и усилие через кронштейн 22 передается лотку 3, в результате чего лоток и транспортируемый материал 8 приходит в движение.
В момент достижения выступа 13 упругого упора 14 срабатывает датчик 15. На блок управления 24 поступает сигнал с датчика 15, блок управления отключает обмотки индуктора 6 от сети. Лоток 3 интенсивно тормозится упругим упором 14 и останавливается. При этом груз 8 по инерции двигается в направлении упругого упора 11 (направление транспортирования). Одновременно с этим ротор 7 резко отходит от индуктора 6 и ударяется за счет накопленной потенциальной энергии в упругих элементах 17 через ролики 19 об лоток 3, создавая импульсы силы снизу вверх и тем самым снижая коэффициент трения материала 8 о лоток. Одновременно ротор 7 под действием потенциальной энергии, накопленной в упругом элементе 11, движется на роликах 19 в обратном направлении и кронштейном 10 начинает сжимать упругий элемент 9. По мере сжатия упругого элемента 9 кронштейн 10 передает усилие кронштейну 23, сообщая лотку 3 дополнительный импульс силы в направлении, противоположном направлению транспортирования, и тем самым увеличивая эффект проскальзывания материала 8 на лотке 3 и повышая производительность транспортирования.
После полной передачи упругим упором 14 запасенной потенциальной энергии лотку 3 последний продолжает движение на роликах 2 в сторону упругого упора 26. В определенный момент времени упор 26 начинает взаимодействовать с выступом 4 лотка 3, что приводит к остановке последнего. После остановки лотка 3, под действием запасенной потенциальной энергии упругого упора 26, начинается его движение в противоположную сторону, одновременно с этим срабатывает датчик положения 25. По сигналу датчика 25 блок управления 24 через заданное время повторно подключает индуктор 6 к сети трехфазного тока, и описанный процесс повторяется.
Плавность пуска конвейера определяется жесткостью упругого элемента 11. Чем больше жесткость упругого элемента 11, тем больше пусковые токи, так как сила от ротора быстрее прикладывается к лотку с грузом. Чем меньше жесткость упругого элемента 11, тем меньше пусковые токи, так как сила от ротора будет передаваться лотку по мере сжатия упругого элемента 11, тем самым обеспечивая его плавный разгон. Большие пусковые токи негативно сказываются на сроке службы обмоток индуктора. Также чем больше жесткость упругого элемента 11, тем резче начинает свое движение конвейер. Следовательно, подбором жесткости упругого элемента 11 можно обеспечить плавный разгон лотка, что предотвращает проскальзывание груза 8 против направления транспортирования и снизить длительность прохождения пусковых токов.
Источники информации
1. Инерционный конвейер: авторское свидетельство, 1265111: МКИ B65G 27/18 / К.К. Барыкин, М.И. Неганов, Н.Г. Терегулов, Р.С. Аипов, А.Н. Алексеев (СССР). - №3884835/27-03: заявл. 23.04.85; опубл. 23.10.86, Бюл.№39. - 3 с.
2. Инерционный конвейер: авторское свидетельство, 1666407: МКИ B65G 27/18, 27/24 / Р.С. Аипов, К.К. Барыкин, Н.Г. Терегулов, Ю.В. Абоймов (СССР). - №4724021/03: заявл. 27.07.89; опубл. 30.07.91, Бюл. №28. - 3 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНЕРЦИОННЫЙ КОНВЕЙЕР | 2010 |
|
RU2422348C1 |
| СЕПАРИРУЮЩАЯ МАШИНА | 2010 |
|
RU2446669C1 |
| СЕПАРИРУЮЩАЯ МАШИНА | 2015 |
|
RU2576458C1 |
| ВИБРАЦИОННЫЙ СЕПАРАТОР | 2015 |
|
RU2581431C1 |
| Инерционный конвейер | 1990 |
|
SU1728095A1 |
| Инерционный конвейер | 1989 |
|
SU1666407A1 |
| Вибрационная центрифуга | 2018 |
|
RU2678008C1 |
| ШАГАЮЩИЙ КОНВЕЙЕР | 2008 |
|
RU2364564C1 |
| Инерционный конвейер | 1985 |
|
SU1265111A1 |
| Инерционный конвейер | 1986 |
|
SU1400983A1 |
Инерционный конвейер содержит лоток (3), установленный на основании (1) на роликах (2) с возможностью взаимодействия с упругими упорами (14, 26), вибропривод в виде индуктора (6) линейного асинхронного двигателя и ротора (7). На роторе жестко установлен кронштейн (10) с возможностью возвратно-поступательного перемещения параллельно транспортирующей поверхности лотка между дополнительно установленными упругими элементами (9, 11). Уменьшается энергоемкость и повышается производительность конвейера. 2 ил.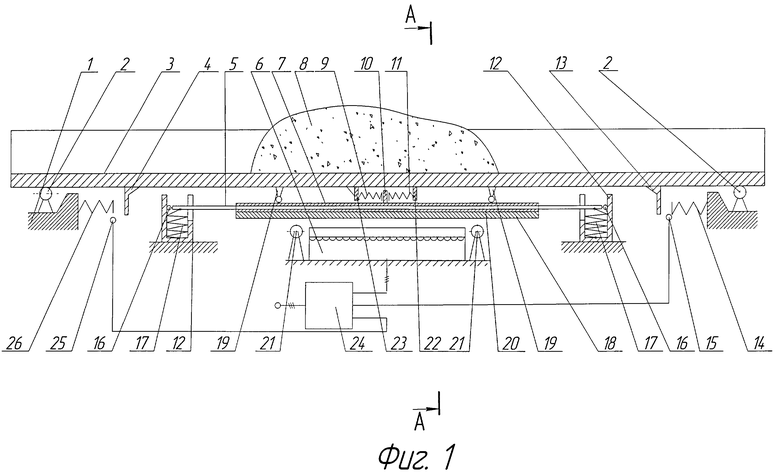
Инерционный конвейер, содержащий лоток с транспортирующей поверхностью, установленный на основании на роликах с возможностью взаимодействия с упругими упорами, расположенными на основании, вибропривод в виде закрепленного на основании индуктора линейного асинхронного двигателя и ротора, установленного в направляющих с возможностью нормального перемещения по отношению к транспортирующей поверхности лотка на упругих элементах, блок управления виброприводом, связанный с датчиками положения лотка, отличающийся тем, что на роторе жестко установлен кронштейн с возможностью возвратно-поступательного перемещения параллельно транспортирующей поверхности лотка между дополнительно установленными упругими элементами.
| ИНЕРЦИОННЫЙ КОНВЕЙЕР | 2010 |
|
RU2422348C1 |
| Инерционный конвейер | 1989 |
|
SU1666407A1 |
| US 2005115807 A1, 02.06.2005 | |||

