Изобретение относится к вибрационной технике, а именно к инерционным конвейерам, и может быть использовано для транспортирования сыпучих и вязких материалов в различных отраслях промышленности.
Известен инерционный конвейер, содержащий установленный на основании на подпружиненных роликах лоток с возможностью взаимодействия с упругими упорами, расположенными на основании, вибррпривод в виде закрепленного на основании под лотком индуктора линейного асинхронного двигателя с блоком управления и ротора, закрепленного на лотке, упругие упоры снабжены датчиками, связанными с блоком управления 1.
Недостатком известного технического решения является низкая производительность. На лотке в процессе работы конвейера действуют нормальные силы, что вынуждает делать лоток более прочным и жестким, а следовательно, и более металлоемким. С другой стороны, линейный асинхронный двигатель вибропривода имеет низкие тяговые показатели из-за несимметрии ЭДС и токов фаз.
Наиболее близким к предлагаемому техническому решению является инерционный конвейер, содержащий лоток, вибропривод в виде закрепленного на основании индуктора линейного асинхронного элект- родвтигателя и ротора, установленного на роликах с возможностью взаимодействия с
расположенными на основании упругими упорами и связанного с лотком упругими элементами, и блок управления 2.
Производительность конвейера определяется нормальными колебаниями ротора относительно транспортируемого лотка. Однако;интенсивность нормальных колебаний падает по мере удаления от ротора по длине лотка. Кроме того, линейный асинхронный электродвигатель имеет низкие тяговые показатели из-за несимметрии фазных ЭДС и токов. Как результат, конвейер имеет низкую производительность.
Целью изобретения является повышение производительности конвейера.
Для этого инерционный конвейер, содержащий транспортирующий лоток, вибропривод в виде закрепленного на основании индуктора линейного асинхронного электродвигателя и ротора, установленного на роликах с возможностью взаимодействия с расположенными на основании упругими упорами и связанного с лотком упругими элементами, и блок управления, снабжен генератором импульсов, связанным с блоком управления, и дополнительными виброприводами, расположенными равномерно по длине лотка, при этом лоток связан с роторами виброприводов посредством направляющих, размещенных под острым углом к направлению транспортирования, при этом обмотки индукторов виброприводов соединены между собой последовательно.
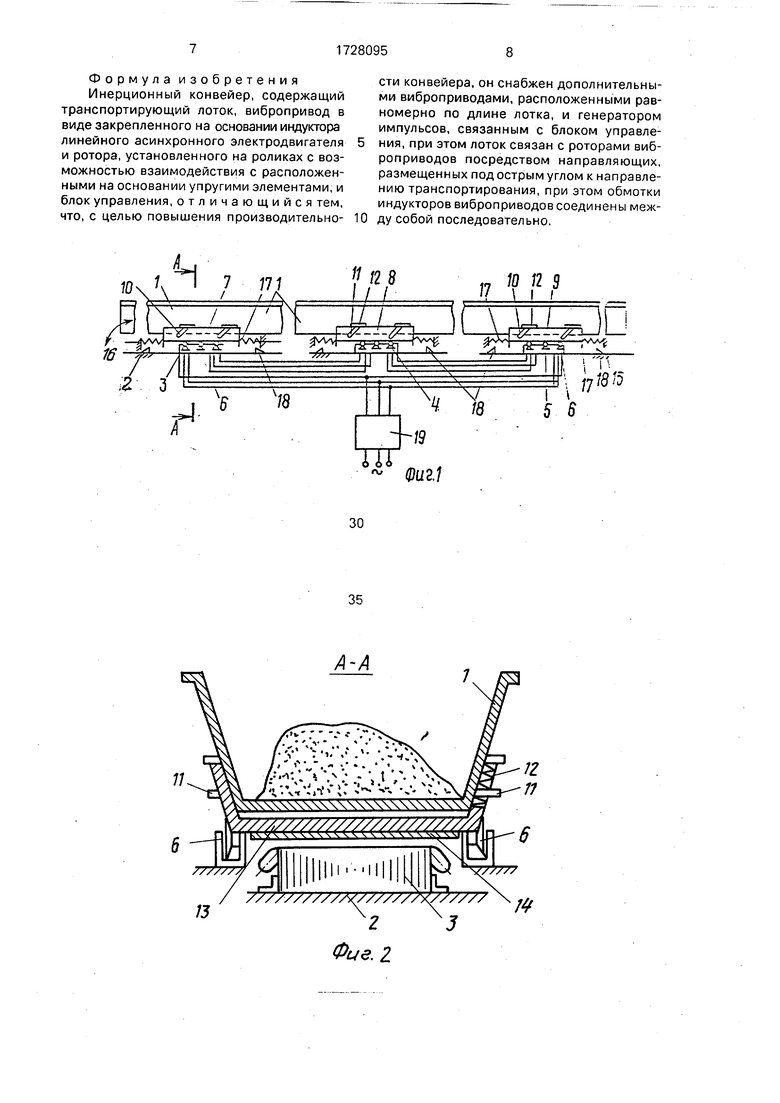
На фиг.1 изображен инерционный конвейер, общий вид; на фиг.2 - сечение А-А на фиг.1; на фиг.3 -соединение обмоток индукторов линейного асинхронного двигателя и блок управления.
Инерционный конвейер содержит лоток 1. На основании 2 под лотком 1 установлены индукторы 3-5 линейного асинхронного электродвигателя. Индукторы 3-5 отстоят один от другого на равном расстоянии. На роликах 6 между лотком 1 и индукторами 3-5 установлены роторы 7-9 линейного асинхронного электродвигателя. В направляющих пазах, 10 роторов 7-9 установлены оси 11 лотка 1, Лоток 1 прикреплен к роторам подвижно с помощью упругих элементов 12, размещенных в направляющих пазах 10, и осей 11. Направляющие пазы 10 в роторах 7-9 выполнены под углом 20-30° к транспортирующей поверхности лотка в направлении транспортирования. Роторы 7-9 выполнены в виде соединенных между собой двух пластин 13 и 14. Пластина 13 выполнена из неферромагнитного материала с большой электропроводностью, например меди, алюминия, а пластина 14 - из
ферромагнитного материала. Необходимый и минимальный воздушный зазор и параллельность роторов 7-9 относительно индукторов 3-5 обеспечивается роликами 6.
5 Роторы 7-9 имеют длину на величину хода большую, чем длина соответствующих индукторов 3-5. На основании 2 закреплены упругие упоры 15 и 16, жестко соединенные другими концами с торцами роторов 7-9.
10 Упругие упоры 15 и 16 выполнены в виде пружин сжатия-растяжения. На роторах 7-9 выполнены выступы 17, имеющие возможность взаимодействовать с ограничительными упорами 18, закрепленными на
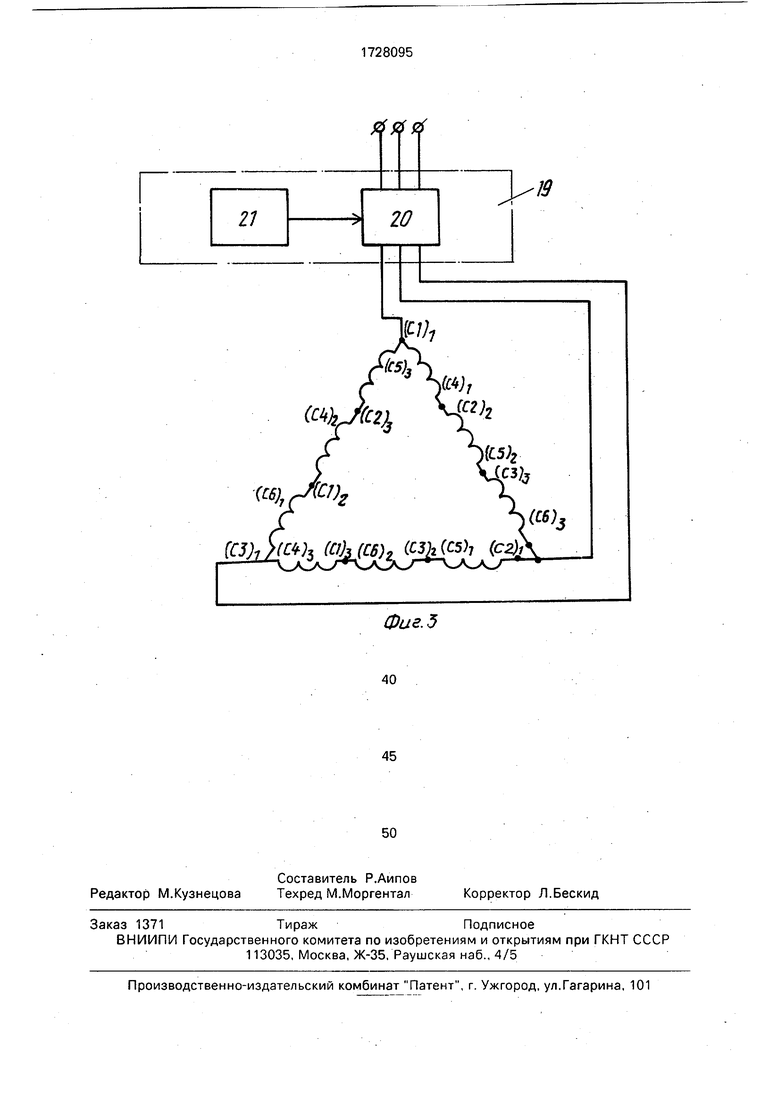
15 основании 2. Обмотки индукторов 3-5 соединены одна с другой последовательно, а при переходе от одного индуктора к другому фазы обмоток меняются местами, но направление бегущего магнитного поля оста0 ется неизменным. Если обозначить начала обмоток фаз индуктора 3 через (С1)з; (С2)з; (С3)з; индуктора 4 через (С 1)4; (С2)4; (С3)4; а индуктора 5 - через (C1)s; (C2)s; (C3)s, а соответствующие концы обмоток индуктора 3
5 через (С4)з; (С5)з; (С6)з; индуктора 4 - (С4)4; (С5)4; (С6)4. индуктора 5 - (C4)s; (C5)s; (С6)б, то необходимый порядок соединения обмоток индуктора будет иметь вид, показанный на фиг.З. Блок управления 19 состоит из
0 тиристорного коммутатора 20 и генератора импульсов 21 с регулируемой частотой и шириной импульсов. Генератор импульсов 21 соединен с коммутатором 20, а коммутатор 20 подключается к трехфазной сети. 065 мотки индуктора соединены с коммутатором 20.
Инерционный конвейер работает следующим образом.
Коммутатор 20 блока управления 19
0 подключает индукторы 3-5 к сети. Индукторы 3-5 (см. фиг.1) создают бегущее магнитное поле, направленное влево вдоль пластин 13. Б пластинах 13 индуцируются электродвижущая сила и электрический ток.
5 При взаимодействии бегущего магнитного поля и электрического тока возникают силы, приводящие роторы 7-9 в движение на роликах 6 в направлении бегущего поля. При этом роторы 7-9 увлекают за собой лоток 1,
0 растягивая упругие упоры 15 и одновременно сжимая упругие упоры 16. Так как направляющие пазы 10 установлены под острым углом, то при движении влево леток приподнимается вверх под действием вер5 тикальной составляющей силы инерции. По сигналу генератора импульсов 21 коммутатор 20 отключает обмотки индукторов 7-9 от cetn. Роторы 7-9 под действием сил растянутых упругих упоров 15 и сжатых упругих упоров 16 начинают движение в обратную
сторону. Лоток 1 под действием сил инерции при движении назад опускается. После полной передачи упругим упорами 15 и 16 запасенной потенциальной энергии роторы 7-9 продолжают движение на роликах 6 из- за наличия кинетической энергии. Упоры 15 и 16 начинают тормозить движение роторов 7-9 и лотка 1. После остановки движения роторов 7-9 под действием запасенной потенциальной энергии упорами 15 и 16 начинается движение роторов 7-9 в противоположную сторону. В определенный момент генератор импульсов 21 дает команду на повторное включение коммутатора 20. Коммутатор 20 повторно подключает индуктор к сети. Описанный процесс повторяется.
Когда лоток движется вперед, приподнимаясь, на частицу груза, лежащего на дне лотка, действуют по вертикали сила тяжести и вертикальная составляющая силы инерции, направленные вниз, а по горизонтали - сила трения и горизонтальная составляющая силы инерции. Сила давления на дно лотка равна сумме сил тяжести и вертикальной составляющей силы инерции.
Для движения частицы груза вперед при прямом ходе лотка необходимо, чтобы сила трения груза о дно лотка была больше, чем горизонтальная составляющая силы инерции груза. При обратном ходе, когда лоток движется назад (опускаясь), вертикальная составляющая силы инерции груза направлена вверх, сила тяжести - вниз, сила давления груза на дно лотка, равна их разности, а сила трения груза уменьшается. Для движения груза вперед при перемещении лотка назад необходимо, чтобы горизонтальная составляющая силы инерции была больше силы трения. Это вполне возможно, т.к. сила давления груза на лоток и сила трения уменьшились. Таким образом, силы давления груза на дно лотка при прямом и обратном его ходах получаются различными по значению, что обеспечивает возможность непрерывного перемещения груза по лотку.
Частота импульсов генератора 21 устанавливается равной собственной частоте инерционного конвейера, определяемой массой подвижных элементов с грузом и суммарной жесткостью упругих упоров 15 и 16. Сказанное обеспечивает резонансную настройку привода конвейера, следовательно, малый расход энергии при установившемся режиме работы конвейера и возможностью создания конвейера высокой производительности. Одновременно длительность импульсов генератора 21 определяется требуемой амплитудой колебаний лотка 1. Увеличение длительности увеличивает амплитуду колебаний, и наоборот, тем самым решается важная проблема инерционных конвейеров выбора оптималь5 ного режима колебаний лотка по амплитуде, которые бы обеспечивали эффективное транспортирование пылевидных и других труднотранспортируемых грузов с явно выраженной зависимостью производительно0 сти от параметров колебаний лотка.
На магнитопроводе индуктора линейного асинхронного двигателя обмотка каждой фазы имеет различное положение по отношению к торцам магнитопровода. Соответ5 ственно в каждой фазе наводятся . различные по величине индуцированные ЭДС, что вызывает появление несимметричной трехфазной системы ЭДС, Несимметричная трехфазная система ЭДС вызывает
0 появление несимметричных трехфазных токов и ухудшение тяговых характеристик двигателя.
В предлагаемом инерционном конвейере для устранения нееимметрии ЭДС и то5 ков линейный асинхронный двигатель состоит из трех индукторов, обмотки трех фаз которых соединяются в соответствии с фиг.З. Три обмотки индукторов 3-5, относящиеся к одной и той же фазе, соединяются
0 последовательно при различном положении их в магнитопроводах по отношению к торцам и неизменном порядке чередования фаз во всех трех индукторах.
Одновременно с этим, так как ротор ли5 нейного асинхронного двигателя взаимодействует с лотком в трех равномерно разнесенных по длине лотка местах, на лоток действует распределенная приводная сила, что позволяет уменьшить жесткость и
0 собственную массу лотка, а также уменьшить передачу вибрационных нагрузок на опорные конструкции,
Дополнительно надо отметить, что в инерционном конвейере, в отличие от про5 тотипа, лоток лежит в напрваляющих роторов виброприводов; что тоже способствует уменьшению жесткости, следовательно, массы лотка.
Все это позволяет добиться цели изо0 бретения: повышения производительности конвейера.
Наклон направляющих пазов под острым углом (20-30°) к направлению транс- портирования взят из практических
5 рекомендаций по наклону движения транспортирующего лотка инерционного конвейера с переменным давлением груза на дно лотка. Ограничительные упоры 18 обеспечивают защиту упругих упоров 15 и 16 от возмож ного удара витка об виток при сжатии пружин.
Формула изобретения Инерционный конвейер, содержащий транспортирующий лоток, вибропривод в виде закрепленного на основании индуктора линейного асинхронного электродвигателя и ротора, установленного на роликах с возможностью взаимодействия с расположенными на основании упругими элементами, и блок управления, отличающийся тем, что, с целью повышения производительно
сти конвейера, он снабжен дополнительными виброприводами, расположенными равномерно по длине лотка, и генератором импульсов, связанным с блоком управления, при этом лоток связан с роторами виброприводов посредством направляющих, размещенных под острым углом к направлению транспортирования, при этом обмотки индукторов виброприводов соединены между собой последовательно.
ЯЯ$
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНЕРЦИОННЫЙ КОНВЕЙЕР | 2013 |
|
RU2523727C1 |
| ИНЕРЦИОННЫЙ КОНВЕЙЕР | 2010 |
|
RU2422348C1 |
| Инерционный конвейер | 1989 |
|
SU1666407A1 |
| Инерционный конвейер | 1985 |
|
SU1265111A1 |
| Инерционный конвейер | 1986 |
|
SU1400983A1 |
| Вибрационный конвейер | 1986 |
|
SU1630999A1 |
| ВИБРАЦИОННЫЙ КОНВЕЙЕР | 2002 |
|
RU2213685C1 |
| Способ транспортирования грузов многосекционным вибрационным конвейером | 1989 |
|
SU1722986A1 |
| Способ вибрационного транспортирования фуражного зерна и других сыпучих материалов | 2016 |
|
RU2617280C1 |
| ШАГАЮЩИЙ КОНВЕЙЕР | 2000 |
|
RU2193515C2 |
Использование: для транспортирования сыпучих и вязких материалов вибрационными конвейерами с целью повышения их производительности. Сущность изобретения; инерционный конвейер содержит транспортирующий лоток 1, блок управления 19, упругие элементы 15 и 16 и вибропривод в виде нескольких закрепленных на основании 2 индукторов 3-5 линейных асинхронных электродвигателей и роторов 7-9. Роторы 7-9 установлены между лотком и индукторами 3-5 на роликах 6. Лоток 1 связан с роторами 7-9 посредством направляющих пазов 10, размещенных под острым углом к направлению транспортирования. Индукторы 3-5 и роторы.7-9 размещены по длине конвейера равномерно. В состав блока управления 19 входит генератор импульсов. Обмотки индукторов 3-5 соединены между собой последовательно. Так, вибропривод разнесен равномерно по длине. При этом снижаются изгибные деформации транспортирующего лотка 1 и тем самым повышается скорость транспортирования и производительность конвейера. 3 ил. (Л
Фиг. 5
| Инерционный конвейер | 1985 |
|
SU1265111A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Инерционный конвейер | 1989 |
|
SU1666407A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
