ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящее изобретение относится к способу помощи при парковке и устройству помощи при парковке для помощи при парковке рассматриваемого транспортного средства.
УРОВЕНЬ ТЕХНИКИ
[0002] Патентный документ 1 описывает систему управления транспортным средством, которая сконфигурирована для: определения, припарковано ли или нет транспортное средство на указанном парковочном месте; и когда транспортное средство не припарковано на парковочном месте должным образом, выдает пользователю предупреждение о том, что парковочное место является другим, и предлагает пользователю повторить попытку парковки.
Документ предшествующего уровня техники
Патентный документ
[0003]
Патентный Документ 1 JP2018-160125A
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Задачи, решаемые изобретением
[0004] Однако в системе управления транспортным средством согласно Патентному документу 1, когда пользователь вручную повторяет попытку парковки после получения предупреждения, транспортное средство может снова припарковаться за пределами парковочного места в зависимости от окружающей ситуации и навыков вождения пользователя, что может быть проблематично.
[0005] Задача, которая должна быть решена с помощью настоящего изобретения, состоит в том, чтобы предоставить способ помощи при парковке и устройство помощи при парковке, которые способны помочь при парковке, так что, когда парковка в ручном режиме не удалась и снова необходима парковка в целевом парковочном месте, человеку, находящемуся в рассматриваемом транспортном средстве, указывают, чтобы он знал, что режим парковки переключается в автоматический режим, чтобы позволить рассматриваемому транспортному средству припарковаться на целевом парковочном месте.
Средства для решения задач
[0006] Способ помощи при парковке и устройство помощи при парковке согласно настоящему изобретению решают вышеупомянутую задачу посредством того, что, когда парковка рассматриваемого транспортного средства выполняется в ручном режиме, определяют на основе состояния выполнения парковки, необходима ли или нет снова парковка в целевом парковочном месте, и подают информацию указания для переключения режима парковки с ручного режима на автоматический режим.
Эффект изобретения
[0007] Согласно настоящему изобретению может быть получен эффект, заключающийся в том, что, когда парковка в направлении целевого парковочного места необходима снова после парковки в ручном режиме, человек, находящийся в рассматриваемом транспортном средстве может быть уведомлен, чтобы он знал, что режим парковки переключается на автоматический режим.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0008]
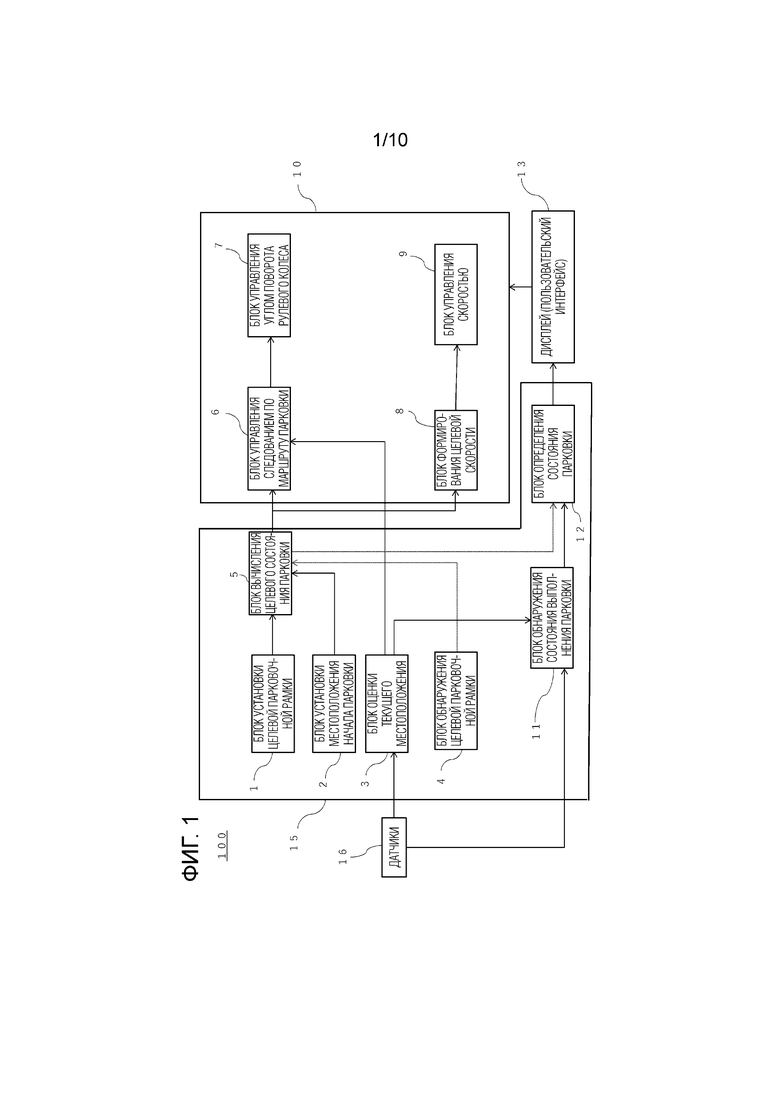
Фиг. 1 является блок-схемой, иллюстрирующей конфигурацию устройства помощи при парковке согласно варианту осуществления настоящего изобретения.
Фиг. 2 является блок-схемой последовательности операций, иллюстрирующей способ помощи при парковке согласно первому варианту осуществления настоящего изобретения.
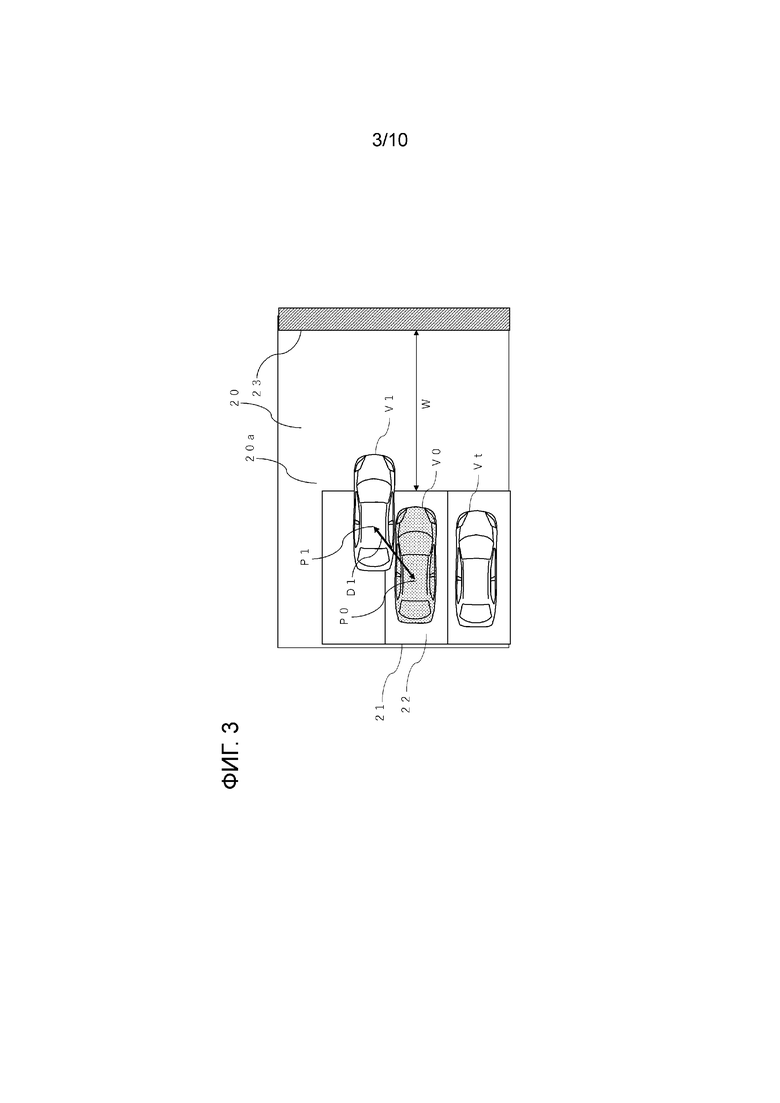
Фиг. 3 является схемой, схематично иллюстрирующей пример, в котором выполняется определение, что парковка в целевом парковочном месте снова необходима в способе помощи при парковке, показанном на фиг. 2.
Фиг. 4 является схемой, иллюстрирующей экран дисплея, который представляет информацию указания для переключения режима парковки рассматриваемого транспортного средства из ручного режима в автоматический режим в способе помощи при парковке, показанном на фиг. 2.
Фиг. 5 является блок-схемой последовательности операций, иллюстрирующей способ помощи при парковке согласно второму варианту осуществления настоящего изобретения.
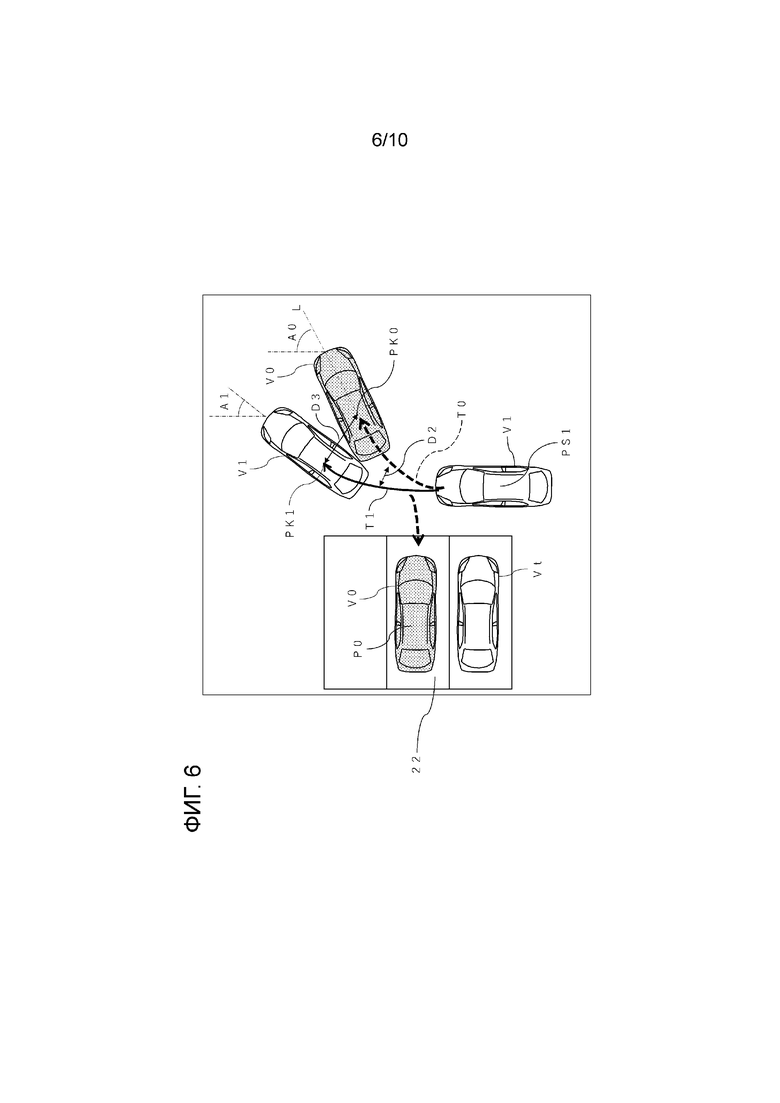
Фиг. 6 является схемой, схематично иллюстрирующей пример, в котором выполняется определение, что парковка в целевом парковочном месте снова необходима в способе помощи при парковке, показанном на фиг. 5.
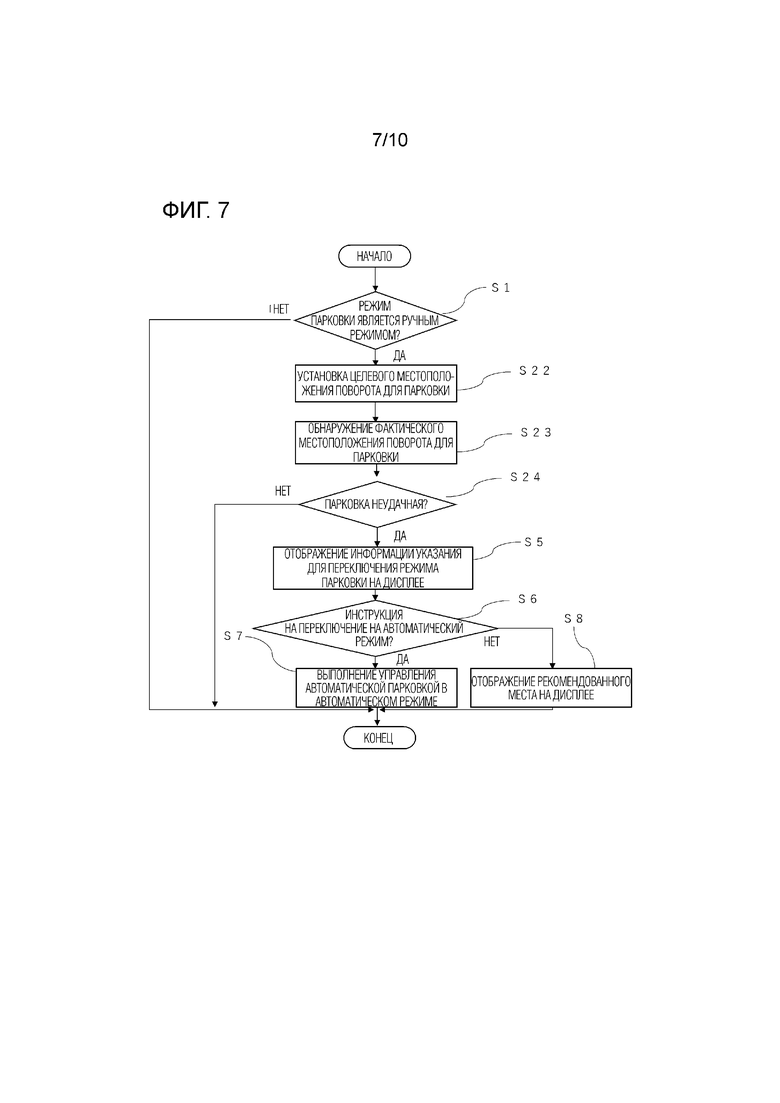
Фиг. 7 является блок-схемой последовательности операций, иллюстрирующей способ помощи при парковке согласно третьему варианту осуществления настоящего изобретения.
Фиг. 8 является блок-схемой последовательности операций, иллюстрирующей способ помощи при парковке согласно четвертому варианту осуществления настоящего изобретения.
Фиг. 9 является блок-схемой последовательности операций, иллюстрирующей способ помощи при парковке согласно пятому варианту осуществления настоящего изобретения.
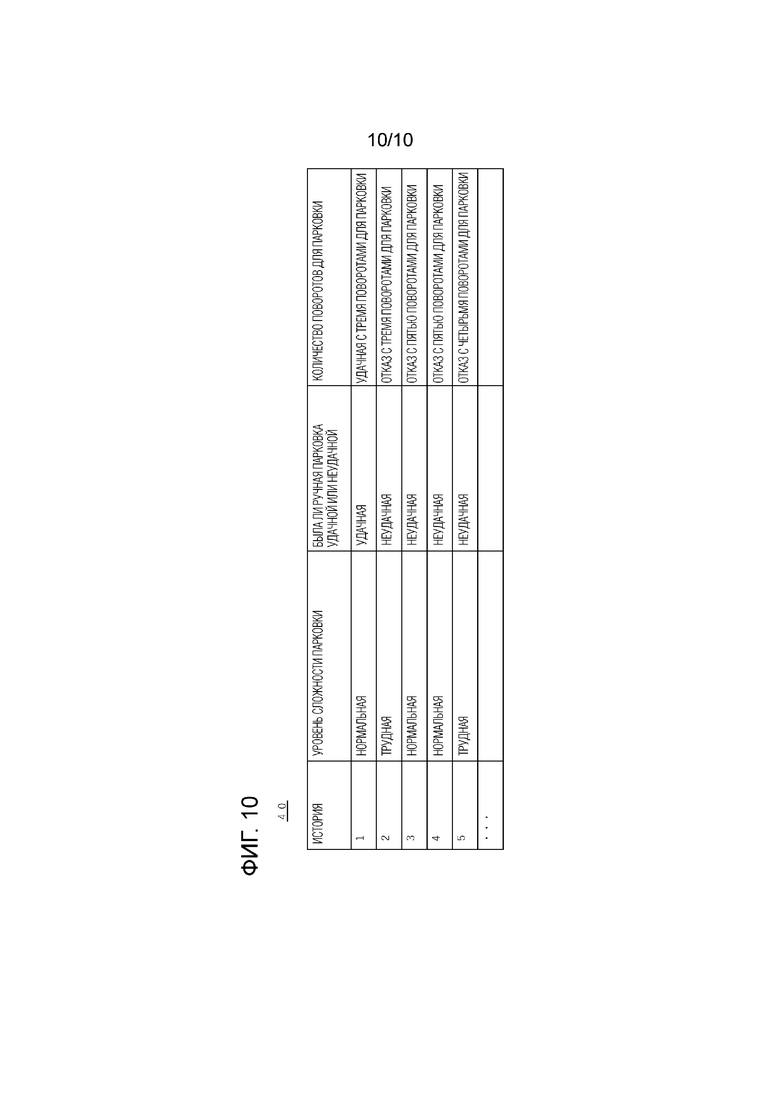
Фиг. 10 является схемой, иллюстрирующей пример истории количества поворотов для парковки, которая используется для вычисления порогового значения количества поворотов для парковки в способе помощи при парковке, показанном на фиг. 9.
Вариант(ы) осуществления изобретения
[0009]
Первый вариант осуществления
Описание будет выполнено со ссылкой на фиг. 1-4 для устройства 100 помощи при парковке согласно первому варианту осуществления настоящего изобретения и способа помощи при парковке с использованием устройства 100 помощи при парковке.
Сначала конфигурация устройства 100 помощи при парковке, установленного в транспортном средстве, будет описана со ссылкой на фиг. 1. Устройство 100 помощи при парковке имеет один или более компьютеров и программное обеспечение, установленное на компьютерах. В частности, устройство 100 помощи при парковке имеет ПЗУ, в котором хранятся управляющие программы для рассматриваемого транспортного средства для автономной работы, чтобы припарковаться на установленном целевом парковочном месте, ЦП, который выполняет программы, хранящиеся в ПЗУ, и ОЗУ, которое служит в качестве доступного устройства хранения.
[0010] Как показано на фиг. 1, устройство 100 помощи при парковке имеет блок 10 управления автоматической парковкой, дисплей 13 в качестве пользовательского интерфейса и контроллер 15. Контроллер 15 имеет блок 1 установки целевой парковочной рамки, блок 2 установки местоположения начала парковки, блок 3 оценки текущего местоположения, блок 4 обнаружения целевой парковочной рамки, блок 5 вычисления целевого состояния парковки, блок 11 обнаружения состояния выполнения парковки, и блок 12 определения состояния парковки. Независимо от того, является ли режим парковки рассматриваемого транспортного средства автоматическим режимом или ручным режимом, блок 1 установки целевой парковочной рамки, блок 2 установки местоположения начала парковки, блок 3 оценки текущего местоположения, блок 4 обнаружения целевой парковочной рамки, блок 5 вычисления целевого состояния парковки, блок 11 обнаружения состояния выполнения парковки и блок 12 определения состояния парковки выполняют соответствующие функции. Кроме того, контроллер 15 выводит вспомогательную информацию для находящихся в рассматриваемом транспортном средстве людей на основе информации о движении рассматриваемого транспортного средства, обнаруженной различными датчиками 16, такими как блок GPS, гироскопический датчик и датчик скорости транспортного средства. Дисплей 13 представляет информацию указания, основанную на вспомогательной информации, которая выводится контроллером 15 находящимся в рассматриваемом транспортном средстве людям. В число находящихся в рассматриваемом транспортном средстве людей входят водитель и другие пассажиры, кроме водителя.
[0011] Когда режим парковки рассматриваемого транспортного средства является автоматическим режимом, блок 10 управления автоматической парковкой выполняет функцию автоматической парковки для автономного управления исполнительным механизмом рулевого управления и исполнительным механизмом акселератора рассматриваемого транспортного средства. Блок 10 управления автоматической парковкой имеет блок 6 управления следованием по маршруту парковки, блок 7 управления углом поворота рулевого колеса, блок 8 формирования целевой скорости и блок 9 управления скоростью. Блок 10 управления автоматической парковкой имеет описанный выше автоматический режим и ручной режим на основе входной команды, основанной на работе транспортного средства, находящегося в транспортном средстве человека для управления исполнительным механизмом рулевого управления и исполнительным механизмом акселератора рассматриваемого транспортного средства. Блок 10 управления автоматической парковкой имеет функцию переключения для переключения между автоматическим режимом и ручным режимом.
[0012] Блок 1 установки целевой парковочной рамки ищет парковочную рамку, существующую около рассматриваемого транспортного средства. Парковочная рамка состоит из прямых линий, таких как белые линии в качестве линий парковки, и задает парковочное место. Когда обнаружено множество парковочных рамок, блок 1 установки целевой парковочной рамки заставляет оператора выбрать требуемую парковочную рамку из парковочных рамок, в которых возможна парковка, и выводит информацию о местоположении выбранной целевой парковочной рамки (например, координаты относительного местоположения от текущего местоположения рассматриваемого транспортного средства и широту/долготу) в блок 5 вычисления целевого состояния парковки.
[0013] Блок 2 установки местоположения начала парковки вычисляет, из какого местоположения следует начинать управление автоматической парковкой, чтобы рассматриваемое транспортное средство могло припарковаться внутри парковочной рамки, установленной блоком 1 установки целевой парковочной рамки, и устанавливает местоположение начала парковки. Информация об установке местоположения начала парковки, установленная блоком 2 установки местоположения начала парковки, выводится в блок 5 вычисления целевого состояния парковки.
[0014] Блок 3 оценки текущего местоположения оценивает текущее местоположение рассматриваемого транспортного средства на основе информации о движении рассматриваемого транспортного средства, обнаруженной датчиками 16, такими как блок GPS, гироскопический датчик и датчик скорости транспортного средства. В частности, блок 3 оценки текущего местоположения использует блок GPS для обнаружения радиоволн, передаваемых через передачи множества спутников, и периодически получает информацию о местоположении рассматриваемого транспортного средства. Затем блок 3 оценки текущего местоположения оценивает текущее местоположение рассматриваемого транспортного средства на основе полученной информации о местоположении рассматриваемого транспортного средства, информации об изменении угла, полученной от гироскопического датчика, и скорости транспортного средства, полученной от датчика скорости транспортного средства. Информация о местоположении рассматриваемого транспортного средства, оцененная блоком 3 оценки текущего местоположения, выводится в блок 11 обнаружения состояния выполнения парковки и блок 6 управления следованием по маршруту парковки блока 10 управления автоматической парковкой через заранее определенные интервалы времени.
[0015] Блок 4 обнаружения целевой парковочной рамки имеет множество камер, которые захватывают изображения вокруг рассматриваемого транспортного средства. Блок 4 обнаружения целевой парковочной рамки обнаруживает целевую парковочную рамку, которая установлена блоком 1 установки целевой парковочной рамки, и выводит в блок 5 вычисления целевого состояния парковки информацию, такую как форма и размер целевой парковочной рамки, и такую информацию, как как форма и размер области вокруг целевой парковочной рамки, в которой может перемещаться рассматриваемое транспортное средство.
[0016] Блок 5 вычисления целевого состояния парковки вычисляет целевое состояние парковки на основе размера рассматриваемого транспортного средства (такого как ширина транспортного средства, длина транспортного средства и минимальный радиус поворота), который предварительно сохранен, информации о целевой парковочной рамке, которую получают из блока 1 установки целевой парковочной рамки и блока 4 обнаружения целевой парковочной рамки, и местоположения начала парковки, которое устанавливается блоком 2 установки местоположения начала парковки. Целевое состояние парковки относится к состоянию транспортного средства для парковки рассматриваемого транспортного средства на целевом парковочном месте. То есть целевое состояние парковки является состоянием транспортного средства, которое должно быть нацелено в один или более моментов времени из текущего местоположения рассматриваемого транспортного средства в целевое парковочное место. Целевое состояние парковки включает в себя целевое парковочное место, целевую траекторию парковки для рассматриваемого транспортного средства, чтобы достичь целевого парковочного места, целевое местоположение поворота для парковки рассматриваемого транспортного средства, чтобы припарковаться на целевом парковочном месте, целевой угол положения в целевом местоположении поворота для парковки и пороговое значение количества поворотов для парковки рассматриваемого транспортного средства, чтобы припарковаться на целевое парковочное место. Блок 5 вычисления целевого состояния парковки выводит информацию о целевом состоянии парковки в блок 6 управления следованием по маршруту парковки и блок 8 формирования целевой скорости блока 10 управления автоматической парковкой и блок 12 определения состояния парковки.
[0017] Блок 11 обнаружения состояния выполнения парковки определяет на основе информации о движении, обнаруженной датчиками 16 и т.п., выполняется ли или нет парковка рассматриваемого транспортного средства в ручном режиме. Когда парковка рассматриваемого транспортного средства выполняется в ручном режиме, блок 11 обнаружения состояния выполнения парковки обращается к информации о движении и информации о текущем местоположении, которое оценивается блоком 3 оценки текущего местоположения, для обнаружения в качестве состояния выполнения парковки состояния транспортного средства в одном или более местоположениях, или в моменты времени от начала до завершения операции парковки рассматриваемого транспортного средства. Состояние выполнения парковки является состоянием рассматриваемого транспортного средства, когда парковка рассматриваемого транспортного средства выполняется в ручном режиме. Состояние выполнения парковки включает в себя текущее местоположение рассматриваемого транспортного средства, наблюдаемое фактическое местоположение парковки, когда рассматриваемое транспортное средство завершает парковку, фактическую траекторию парковки, связанную с фактическим перемещением рассматриваемого транспортного средства, фактическое местоположение поворота для парковки вследствие фактической операции парковки рассматриваемого транспортного средства, фактический угол положения в фактическом местоположении поворота для парковки и фактическое количество поворотов для парковки вследствие фактической операции парковки рассматриваемого транспортного средства. «Обнаружение состояния выполнения парковки» включает в себя сохранение обнаруженного состояния выполнения парковки в качестве истории и обращение к сохраненной прошлой истории при обнаружении текущего состояния выполнения парковки. «Одно или более местоположений или моментов времени от начала до завершения операции парковки рассматриваемого транспортного средства» включают в себя, по меньшей мере одно или два или более из (1) начального местоположения или момента времени, в которых рассматриваемое транспортное средство начинает операцию парковки, ( 2) местоположение парковки или момент времени остановки, в которых рассматриваемое транспортное средство останавливается после завершения парковки, и (3) местоположение или момент времени поворота для парковки, когда операция поворота для парковки выполняется в середине операции парковки.
[0018] Когда парковка рассматриваемого транспортного средства выполняется в ручном режиме, блок 12 определения состояния парковки определяет на основе состояния выполнения парковки, обнаруженного блоком 11 обнаружения состояния выполнения парковки, необходима ли или нет снова парковка в целевом парковочном месте (нужно ли или нет повторять попытку парковки). Случай, в котором «парковка в целевом парковочном месте необходима снова» относится к случаю, в котором выполняется определение, что процесс выполнения парковки в автоматическом режиме необходим снова после того, как парковка рассматриваемого транспортного средства выполнена в ручном режиме, то есть случай, когда рассматриваемому транспортному средству не удалось припарковаться в ручном режиме.
[0019] В частности, блок 12 определения состояния парковки сравнивает целевое состояние парковки, вычисленное блоком 5 вычисления целевого состояния парковки, с состоянием выполнения парковки, обнаруженным блоком 11 обнаружения состояния выполнения парковки, и определяет на основе разницы между целевым состоянием парковки и состоянием выполнения парковки, не удалось ли рассматриваемому транспортному средству припарковаться, то есть, необходима ли или нет снова парковка в целевом парковочном месте. Когда разница между целевым состоянием парковки и состоянием выполнения парковки не меньше, чем предварительно установленное пороговое значение оценки для процесса парковки, блок 12 определения состояния парковки определяет, что парковка рассматриваемого транспортного средства не удалась, то есть парковка в целевом парковочном месте снова необходима. Пороговое значение оценки для процесса парковки относится к опорному значению разницы, которое допустимо для парковки рассматриваемого транспортного средства на целевом парковочном месте, когда существует разница между целевым состоянием парковки и состоянием выполнения парковки. Пороговое значение оценки может быть вычислено на основе идеального состояния транспортного средства, когда рассматриваемое транспортное средство перемещается на целевое парковочное место. Случаи, в которых «выполнено определение, что парковка рассматриваемого транспортного средства не удалась», то есть случаи, в которых «снова необходима парковка в целевом парковочном месте», включают в себя случай, в котором фактическое местоположение парковки, когда парковка фактически завершена отклоняется от целевого парковочного места и случай, в котором предсказывается, что фактическое местоположение парковки будет отклоняться от целевого парковочного места, если операция парковки будет продолжена без какого-либо изменения.
[0020] Пороговое значение оценки может быть установлено, например, на основе одного или двух или более из следующих факторов (1) - (4):
(1) расстояние в отношении целевого парковочного места;
(2) расстояние в отношении опорной траектории, ведущей к целевому парковочному месту;
(3) расстояние в отношении местоположения поворота для парковки на опорной траектории, ведущей к целевому парковочному месту; и
(4) ориентация (положение) рассматриваемого транспортного средства в отношении угла положения в местоположении поворота для парковки на опорной траектории, ведущей к целевому парковочному месту.
Дополнительно или альтернативно, одно пороговое значение оценки может быть установлено посредством взвешивания соответствующих пороговых значений оценки, которые устанавливаются на основе одного или двух или более из вышеуказанных (1) - (4), и суммирования этих пороговых значений оценки.
Опорная траектория является целевой траекторией парковки, рассчитанной по программе парковки, которая предварительно сохранена для выполнения автоматического режима.
[0021] Дисплей 13 представляет собой пользовательский интерфейс, который представляет информацию, используемую водителем для вождения или т.п., такую как информация о текущем местоположении рассматриваемого транспортного средства, информация о состоянии транспортного средства и информация о дорожном движении. Дополнительно или альтернативно, дисплей 13 может быть дисплеем с сенсорной панелью, и различные инструкции и варианты выбора могут быть введены находящимся в рассматриваемом транспортном средстве человеком, касающимся и управляющим экраном дисплея 13. Когда блок 12 определения состояния парковки определяет, что парковка рассматриваемого транспортного средства не удалась, дисплей 13 представляет информацию указания для переключения режима парковки рассматриваемого транспортного средства с ручного режима на автоматический режим. То есть при определении того, что парковка в целевом парковочном месте снова необходима, контроллер 15 выводит на дисплей 13 информацию указания для переключения режима парковки рассматриваемого транспортного средства с ручного режима на автоматический режим. Информация указания включает в себя отображение подтверждения, с помощью которого возможно выбрать, переключать ли или нет режим парковки рассматриваемого транспортного средства с ручного режима на автоматический режим. Когда находящийся в рассматриваемом транспортном средстве человек вводит инструкцию на переключение режима парковки рассматриваемого транспортного средства на автоматический режим на дисплее 13 на основе этого отображения подтверждения, режим парковки рассматриваемого транспортного средства переключается с ручного режима на автоматический режим, и блок 10 управления автоматической парковкой выполняет функцию автоматической парковки. Это позволяет устройству 100 помощи при парковке помогать парковке, выполняя управление парковкой, чтобы рассматриваемое транспортное средство направлялось к целевому парковочному месту.
[0022] Блок 6 управления следованием по маршруту парковки блока 10 управления автоматической парковкой вычисляет на основе информации о целевом состоянии парковки, полученной из блока 5 вычисления целевого состояния парковки, и текущего местоположения рассматриваемого транспортного средства, полученного из блока 3 оценки текущего местоположения, целевой угол поворота рулевого колеса для рассматриваемого транспортного средства, чтобы припарковаться на целевом парковочном месте при поддержании целевого состояния парковки. Блок 6 управления следованием по маршруту парковки вычисляет целевой угол поворота рулевого колеса в соответствии с текущим местоположением рассматриваемого транспортного средства в предварительно определенные интервалы времени и выводит целевой угол поворота рулевого колеса в блок 7 управления углом поворота рулевого колеса. Блок 7 управления углом поворота рулевого колеса генерирует на основе целевого угла поворота рулевого колеса, полученного из блока 6 управления следованием по маршруту парковки, управляющий сигнал для управления исполнительным механизмом рулевого управления рассматриваемого транспортного средства.
[0023] Блок 8 формирования целевой скорости блока 10 управления автоматической парковкой вычисляет на основе информации о целевом состоянии парковки, полученной из блока 5 вычисления целевого состояния парковки, целевую скорость транспортного средства для парковки рассматриваемого транспортного средства на целевом парковочном месте при поддержании целевого состояния парковки. Блок 9 управления скоростью генерирует на основе целевой скорости транспортного средства, полученной от блока 8 формирования целевой скорости, управляющий сигнал для управления исполнительным механизмом акселератора рассматриваемого транспортного средства.
[0024] В автоматическом режиме управление исполнительным механизмом рулевого управления блоком 7 управления углом поворота рулевого колеса и управление исполнительным механизмом акселератора блоком 9 управления скоростью выполняются одновременно, и, таким образом, рассматриваемым транспортным средством управляют автономно и оно направляется таким образом, чтобы припарковаться на установленном целевом парковочном месте.
[0025] Пример способа помощи при парковке для рассматриваемого транспортного средства, выполняемого устройством 100 помощи при парковке, затем будет описан со ссылкой на фиг. 2-4. Следующее описание будет выполнено на основе примера, в котором рассматриваемое транспортное средство V1 паркуется на парковке 20, проиллюстрированного на фиг. 3. Фиг. 3 иллюстрирует рассматриваемое транспортное средство V1, которое фактически паркуется в фактическом местоположении P1 парковки, а также виртуальное рассматриваемое транспортное средство V0, когда предполагается, что рассматриваемое транспортное средство V1 паркуется в целевом местоположении P0 парковки в целевом парковочном месте 22 на основе целевого состояния парковки, и другое транспортное средство Vt, которое припарковано на парковке 20 до рассматриваемого транспортного средства.
[0026] Сначала на этапе S1, показанном на фиг. 2, блок 12 определения состояния парковки устройства 100 помощи при парковке определяет, является ли или нет режим парковки рассматриваемого транспортного средства V1 ручным режимом. Здесь, когда режим парковки представляет собой не ручной режим, а автоматический режим, автономная помощь при парковке уже выполняется устройством 100 помощи при парковке, и, следовательно, управление для вывода информации указания для переключения режима парковки завершено. Определение того, является ли режим парковки рассматриваемого транспортного средства V1 ручным режимом, может выполняться на основе того, выбирает ли находящийся в транспортном средстве человек автоматический режим, выбирает ли находящийся в транспортном средстве человек ручной режим, есть ли сигнал флага или сигнал управления, который выводится, когда парковка выполняется в автоматическом режиме, задействует ли находящийся в транспортном средстве человек переключатель для ввода в конфигурации, в которой выполняется автоматическое управление, когда находящийся в транспортном средстве человек приводит в действие переключатель для ввода, или тому подобное.
[0027] С другой стороны, когда выполнено определение, что режим парковки является ручным режимом, на этапе S2 блок 5 вычисления целевого состояния парковки устройства 100 помощи при парковке вычисляет целевое местоположение P0 парковки на основе местоположения целевой парковочной рамки 21, которая установлена блоком 1 установки целевой парковочной рамки, и диапазон целевого парковочного места 22, которое задан внутри целевой парковочной рамки 21. Затем управление переходит на этап S3, на котором блок 11 обнаружения состояния выполнения парковки устройства 100 помощи при парковке обнаруживает фактическое местоположение P1 парковки рассматриваемого транспортного средства V1.
Порядок этапов S2 и S3, проиллюстрированный на фиг. 2 может быть изменен, или эти этапы могут выполняться одновременно.
Даже когда выполнено определение, что режим парковки является ручным режимом, устройство 100 помощи при парковке выполняет процесс, необходимый для помощи при парковке в автоматическом режиме, при подготовке к переключению из ручного режима.
[0028] Управление переходит на этап S4, на котором, как показано на фиг. 3, блок 12 определения состояния парковки устройства 100 помощи при парковке определяет на основе разницы между целевым местоположением P0 парковки и фактическим местоположением P1 парковки, то есть расстояния D1, была ли или нет парковка неудачной. В частности, когда расстояние D1 не меньше, чем предварительно установленное пороговое значение оценки для процесса парковки, выполняется определение, что парковка рассматриваемого транспортного средства V1 в ручном режиме не удалась, и снова необходима парковка в целевом парковочном месте 22. Здесь, когда расстояние D1 меньше, чем предварительно установленное пороговое значение оценки для процесса парковки, то есть, когда рассматриваемое транспортное средство V1 успешно припарковалось, управление завершается.
[0029] Устройство 100 помощи при парковке вычисляет уровень сложности парковки для целевого парковочного места 22 на основе размера целевого парковочного места 22, показанного на фиг. 3 и вычисляет пороговое значение оценки на основе уровня сложности парковки. То есть, чем шире целевое парковочное место 22, тем ниже уровень сложности парковки и чем уже целевое парковочное место 22, тем выше уровень сложности парковки. Дополнительно или альтернативно, уровень сложности парковки для целевого парковочного места 22 может быть вычислен на основе размера окружающего пространства 20a, смежного с целевым парковочным местом 22, и пороговое значение оценки может быть вычислено на основе уровня сложности парковки. Размер окружающего пространства 20a вычисляется на основе расстояния W между стеной 23 парковки 20 и целевой парковочной рамкой 21, количества и местоположений других транспортных средств Vt, припаркованных около целевого парковочного места 22, размеров других транспортных средств Vt и т.д.
Дополнительно или альтернативно уровень сложности парковки может быть установлен ниже, поскольку водитель имеет больший стаж вождения или полное расстояние проезда. Дополнительно или альтернативно, когда возраст водителя старше заранее определенного возраста, уровень сложности парковки может быть отрегулирован на высокий.
[0030] Когда парковка не удалась, управление переходит на этап S5, на котором, как показано на фиг. 4, информация указания для переключения режима парковки с ручного режима на автоматический режим выводится на дисплей 13. Затем, на этапе S6, определяется, есть ли инструкция на переключение режима парковки с ручного режима на автоматический режим. В частности, информация указания, выводимая на экран дисплея 13, включает в себя отображения 31, 32 и 33 подтверждения, с помощью которых возможно выбрать, переключать ли или нет режим парковки рассматриваемого транспортного средства V1 с ручного режима на автоматический режим. То есть графическое изображение V1’ рассматриваемого транспортного средства V1 отображается на левой стороне экрана дисплея 13, а отображения 31, 32 и 33 подтверждения отображаются на правой стороне. Отображение 31 подтверждения является отображением для подтверждения находящимися в транспортном средстве людьми, следует ли изменить режим парковки с ручного режима на автоматический режим для выполнения помощи при парковке устройством 100 помощи при парковке. Отображение 32 подтверждения является отображением кнопок, с помощью которого находящийся в транспортном средстве человек отвечает «Да» на запрос на отображении 31 подтверждения, тем самым вводя инструкцию на переключение режима парковки с ручного режима на автоматический режим. С другой стороны, отображение 33 подтверждения является отображением кнопок, с помощью которого находящийся в транспортном средстве человек отвечает «Нет» на запрос на отображении 31 подтверждения, тем самым выбирая вариант отказа от ввода инструкции на переключение режима парковки на автоматический режим. То есть находящийся в транспортном средстве человек отвечает «Нет» на запрос на отображении 31 подтверждения и, таким образом, выбирает ручной режим в качестве режима парковки. Кроме того, когда находящийся в транспортном средстве человек не выполняет никаких операций до тех пор, пока не истечет некоторый период времени после того, как информация указания для переключения режима парковки будет выведена на дисплей 13, вследствие истечения времени ожидания выполняется определение, что находящийся в транспортном средстве человек не ввел инструкцию на переключение режима парковки в автоматический режим. Таким образом, на этапе S6, когда находящийся в транспортном средстве человек касается отображения 32 подтверждения, выполняется определение, что имеется инструкция на переключение режима парковки рассматриваемого транспортного средства V1 с ручного режима на автоматический режим.
[0031] Здесь, когда выбирается, переключать ли или нет режим парковки рассматриваемого транспортного средства V1 на дисплее 13 на основе отображения 32 подтверждения, информация, указывающая, что выбран либо ручной режим, либо автоматический режим, выводится на дисплей 13 на основе информации, выбранной находящимся в рассматриваемом транспортном средстве человеком.
[0032] Чтобы отдать приоритет намерению водителя вручную выполнять вождение, устройство 100 помощи при парковке не выводит отображение указания для переключения режима парковки на дисплей 13 до тех пор, пока не будет выполнено определение, что парковка не удалась. Отображение указания для переключения режима парковки выводится в момент времени, когда парковка завершена и рассматриваемое транспортное средство V1 выполняет остановку.
[0033] Когда инструкция на переключение на автоматический режим вводится на дисплей 13, управление переходит на этап S7, на котором блок 10 управления автоматической парковкой устройства 100 помощи при парковке выполняет функцию автоматической парковки, чтобы выполнять помощь при повторной попытке парковки, так что рассматриваемое транспортное средство V1 может быть припарковано в местоположении P0 парковки в целевом парковочном месте 22. То есть, при определении того, что необходимо снова переместиться к целевому парковочному месту 22, устройство 100 помощи при парковке выводит информацию указания на дисплей 13, затем переключает режим парковки рассматриваемого транспортного средства V1 с ручного режима на автоматический режим, и выполняет управление парковкой для рассматриваемого транспортного средства V1, чтобы припарковаться на целевом парковочном месте 22. Когда находящийся в рассматриваемом транспортном средстве человек выбирает автоматический режим в качестве режима парковки, дисплей 13 отображает вспомогательное изображение, указывающее целевое парковочное место 22.
[0034] С другой стороны, когда инструкция на переключение на автоматический режим не вводится на дисплей 13, управление переходит на этап S8, на котором режим парковки поддерживается на ручном режиме, а целевое парковочное место 22 отображается на экране дисплея 13 в качестве рекомендуемого места. Рекомендуемое место является отображением указания ручной парковки на основе целевого состояния парковки. Отображение указания ручной парковки, когда режим парковки является ручным режимом, может включать в себя отображение опорной траектории, целевого местоположения поворота для парковки и т.д. в дополнение к рекомендуемому месту. Указание ручной парковки, включая рекомендуемое место, не отображается на дисплее 13 до тех пор, пока на этапе S4 не будет выполнено определение, что парковка не удалась. То есть отображение указания ручной парковки отображается на дисплее 13 только тогда, когда инструкция на переключение режима парковки на автоматический режим не вводится на этапе S6.
[0035] Как описано выше, в способе помощи при парковке согласно настоящему варианту осуществления, когда парковка рассматриваемого транспортного средства V1 выполняется в ручном режиме, контроллер 15 устройства 100 помощи при парковке определяет на основе состояния выполнения парковки, необходима ли или нет снова парковка в целевом парковочном месте 22. При определении того, что парковка в целевом парковочном месте 22 необходима снова, контроллер 15 выводит на дисплей 13 информацию указания для переключения режима парковки рассматриваемого транспортного средства V1 с ручного режима на автоматический режим. Это позволяет устройству 100 помощи при парковке выполнять помощь при парковке, так что, когда парковка в ручном режиме не удалась после попытки парковки, то есть когда снова необходима парковка в целевом парковочном месте 22, находящемуся в транспортном средстве человеку указывают, чтобы он знал, что режим парковки переключается на автоматический режим.
[0036] Когда парковка рассматриваемого транспортного средства V1 выполняется в ручном режиме, устройство 100 помощи при парковке вычисляет целевое местоположение P0 парковки в целевом парковочном месте 22 в качестве целевого состояния парковки. Кроме того, устройство 100 помощи при парковке обнаруживает фактическое местоположение P1 парковки, когда рассматриваемое транспортное средство V1 завершает парковку, в качестве состояния выполнения парковки. Затем, на основе величины отклонения, то есть разницы между целевым местоположением P0 парковки и фактическим местоположением P1 парковки, устройство 100 помощи при парковке выводит на дисплей 13 информацию указания для переключения режима парковки рассматриваемого транспортного средства V1 с ручного режима на автоматический режим. Посредством этой операции, когда происходит отклонение между целевым местоположением P0 парковки и фактическим местоположением P1 парковки, то есть когда выполняется определение, что парковка в ручном режиме не удалась и снова необходима парковка в целевом парковочном месте 22, устройство 100 помощи при парковке указывает находящемуся в рассматриваемом транспортном средстве человеку, чтобы он знал, что режим парковки переключается на автоматический режим. Это позволяет устройству 100 помощи при парковке выполнять функцию автоматической парковки на основе информации указания для переключения режима парковки на автоматический режим, и устройство 100 помощи при парковке может выполнять помощь при парковке, так что рассматриваемое транспортное средство V1 может надежно парковаться в целевом местоположении P0 парковки на целевом парковочном месте 22.
[0037] Дополнительно или альтернативно, когда расстояние D1 в качестве разницы между целевым местоположением P0 парковки и фактическим местоположением P1 парковки больше по длине, чем предварительно установленное пороговое значение оценки для процесса парковки, устройство 100 помощи при парковке определяет, что парковка в ручном режиме не удалась, и снова необходима парковка в целевом парковочном месте 22. Это позволяет надлежащим образом выполнить определение, была ли или нет парковка неудачной, принимая во внимание ошибку, которая возникает при операции парковки в ручном режиме.
[0038] Дополнительно или альтернативно, когда определяется, что парковка рассматриваемого транспортного средства V1 не удалась и снова необходима парковка в целевом парковочном месте 22, устройство 100 помощи при парковке выводит на дисплей 13, который является пользовательским интерфейсом, информацию указания для переключения режима парковки рассматриваемого транспортного средства V1 с ручного режима на автоматический режим. Эта информация указания включает в себя отображения 31, 32, и 33 подтверждения, с помощью которого возможно выбрать, переключать ли или нет режим парковки рассматриваемого транспортного средства V1 с ручного режима на автоматический режим. Когда инструкция на переключение режима парковки рассматриваемого транспортного средства V1 вводится на дисплей 13 на основе этих отображений 31, 32 и 33 подтверждения, устройство 100 помощи при парковке переключает режим парковки рассматриваемого транспортного средства V1 с ручного режима на автоматический режим для выполнения помощи при парковке рассматриваемого транспортного средства V1. То есть устройство 100 помощи при парковке выполняет управление парковкой для рассматриваемого транспортного средства V1, чтобы припарковаться на целевом парковочном месте 22. С другой стороны, когда инструкция на переключение режима парковки рассматриваемого транспортного средства V1 не вводится на дисплей 13 или, когда находящийся в транспортном средстве человек выбирает ручной режим, режим парковки рассматриваемого транспортного средства V1 поддерживается на ручном режиме.
Посредством этой операции возможно выбрать, будет ли или нет помощь при парковке выполняться устройством 100 помощи при парковке при повторной попытке парковки, в соответствии с намерением находящегося в рассматриваемом транспортном средстве человека.
[0039] Дополнительно или альтернативно, когда инструкция на переключение режима парковки рассматриваемого транспортного средства V1 не вводится и режим парковки рассматриваемого транспортного средства V1 поддерживается на ручном режиме, устройство 100 помощи при парковке отображает целевое парковочное место 22 на дисплее 13 в качестве рекомендуемого места. Таким образом, посредством вывода отображения указания ручной парковки на основе целевого состояния парковки на дисплей 13, даже когда ручная парковка повторяется после неудачной парковки, указание может быть выполнено таким образом, чтобы позволить рассматриваемому транспортному средству V1 более надежно припарковаться в целевом местоположении P0 парковки на целевом парковочном месте 22.
[0040] Дополнительно или альтернативно, когда находящийся в транспортном средстве человек выбирает, переключать ли или нет режим парковки рассматриваемого транспортного средства V1 на основе отображения 32 подтверждения, информация, указывающая, что либо ручной режим, либо автоматический режим выбирается на основе информации, выбираемой находящимся в транспортном средстве человеком, выводится на дисплей 13. Когда находящийся в транспортном средстве человек выбирает автоматический режим в качестве режима парковки, дисплей 13 отображает вспомогательное изображение, указывающее целевое парковочное место 22. Это позволяет водителю и находящемуся в транспортном средстве человеку четко подтверждать текущее состояние парковки рассматриваемого транспортного средства V1.
[0041] Дополнительно или альтернативно, когда парковка рассматриваемого транспортного средства V1 не выполняется в ручном режиме, то есть когда режим парковки является автоматическим режимом, блок 11 обнаружения состояния выполнения парковки не обнаруживает состояние выполнения парковки. Это позволяет устройству 100 помощи при парковке обнаруживать состояние выполнения парковки рассматриваемого транспортного средства V1 только при необходимости.
[0042] Устройство 100 помощи при парковке может устанавливать пороговое значение оценки ниже, когда уровень сложности парковки выше, и может устанавливать пороговое значение оценки выше, когда уровень сложности парковки ниже. Благодаря этой установке, чем выше пороговое значение оценки, тем меньше вероятность вывода информации указания для переключения с ручного режима на автоматический режим, и чем ниже пороговое значение оценки, тем больше вероятность вывода информации указания для переключения с ручного режима на автоматический режим. То есть устройство 100 помощи при парковке может помогать при парковке, так что ручной режим продолжается, когда уровень сложности парковки ниже. Напротив, устройство 100 помощи при парковке может помогать при парковке, так что достигается переключение с ручного режима на автоматический режим, когда окружающая среда парковки представляет собой окружающую среду, в которой уровень сложности парковки выше, то есть окружающую среду, в которой водитель с большей вероятностью потерпит неудачу при парковке. Таким образом, устанавливая пороговое значение оценки в соответствии с уровнем сложности парковки, устройство 100 помощи при парковке может предлагать или выполнять помощь при парковке в автоматическом режиме в то время, когда водитель не может припарковаться в ручном режиме или, когда выполняется определение, что вероятность неудачи высока.
[0043] В настоящем варианте осуществления пользовательский интерфейс не ограничен дисплеем 13 и может быть громкоговорителем, который выводит голос, микрофоном, который принимает голосовой ввод, и т.п. Громкоговоритель в качестве пользовательского интерфейса может выводить голос, когда выбран один из ручного режима или автоматического режима, и может не выводить голос, когда выбран другой. Голосовая информация, когда выбран ручной режим, и голосовая информация, когда выбран автоматический режим, могут выводиться как разные голоса. Голосовая информация может выводиться в виде, в котором объединяются любые два или более из содержимого, громкость, частота, время вывода, время, кода звук выводится, и время, когда звук не выводится (время тишины).
[0044] Дисплей 13 не ограничен дисплеем с сенсорной панелью. То есть водитель может нажимать пальцем кнопку, обеспеченную около дисплея 13, или управлять пультом дистанционного управления, тем самым вводя, следует ли или нет переключать режим парковки. Дополнительно или альтернативно, инструкция относительно того, переключать ли или нет режим парковки, может вводиться датчиком, обеспеченным в транспортном средстве, обнаруживающим высказывание или жест водителя.
[0045] Дополнительно или альтернативно, дисплей 13 может отображать вывод отображаемой информации, когда выбран ручной режим, и вывод отображаемой информации, когда выбран автоматический режим, так что один из них выделяется по сравнению с другим. Примеры схем, используемых для выделения отображаемой информации, включают известные схемы, такие как схема увеличения размера значка, указывающего отображаемую информацию, схема установки цвета на прогрессирующий цвет (цвет ярче, чем отступающий цвет, цвет, который выглядит ближе или более теплый цвет), схема увеличения яркости и схема сокращения интервала включения/выключения свечения.
[0046] Дополнительно или альтернативно, дисплей 13 может выводить отображаемую информацию, когда выбран один из ручного режима или автоматического режима, и может не выводить отображаемую информацию, когда выбирается другой. Дисплей 13 может отображать с разными схемами вывод отображаемой информации, когда выбран ручной режим, и вывод отображаемой информации, когда выбран автоматический режим. Отображаемая информация может выводиться в виде, в котором любые два или более из содержимого, формы, цвета, яркости, времени, когда выводится отображаемая информация, и времени, когда отображаемая информация не выводится (не время отображения) скомбинированы.
[0047] Дополнительно или альтернативно, после того, как парковка рассматриваемого транспортного средства V1 завершена и водитель выходит из транспортного средства, отображение указания, проиллюстрированное на фиг. 4 может выводиться на экран терминала, который носит водитель. В таком случае водитель может удаленно дать указание устройству 100 помощи при парковке выполнить функцию автоматической парковки, чтобы выполнить помощь при парковке в повторной попытке, выбрав «Да» на отображении 32 подтверждения на месте.
[0048] Дополнительно или альтернативно, когда выполнено определение, что парковка не удалась, устройство 100 помощи при парковке может не выводить отображение 31, 32 или 33 подтверждения, а после представления информации указания для переключения режима парковки устройство 100 помощи при парковке может переключить режим парковки на автоматический режим, чтобы помочь при парковке в состоянии, в котором нет инструкции от находящегося в транспортном средстве человека.
[0049] Второй вариант осуществления
Способ помощи при парковке согласно второму варианту осуществления настоящего изобретения будет описан со ссылкой на фиг. 5 и 6.
Конфигурации и этапы управления, относящиеся к одним и тем же ссылочным позициям, что и показанные на фиг. 1-4 имеют одинаковые или похожие характеристики, поэтому подробное описание ниже не приводится.
[0050] Как показано на фиг. 5, когда на этапе S1 выполняется определение, что режим парковки является ручным режимом, за этим этапом следует этап S12, на котором блок 5 вычисления целевого состояния парковки устройства 100 помощи при парковке вычисляет опорную траекторию T0, показанную на фиг. 6. Опорная траектория T0 является траекторией парковки, вычисленной в предположении, что рассматриваемое транспортное средство V1, расположенное в местоположении PS1 начала парковки, припаркуется в целевом местоположении P0 парковки на целевом парковочном месте 22 с одним поворотом для парковки. Опорная траектория T0 вычисляется с использованием программы парковки, которая предварительно сохранена для выполнения автоматического режима. Затем управление переходит на этап S13, на котором блок 11 обнаружения состояния выполнения парковки устройства 100 помощи при парковке обнаруживает фактическую траекторию T1 парковки на основе фактического угла поворота рулевого колеса (величины поворота рулевого колеса) рассматриваемого транспортного средства V1.
Опорная траектория T0 вычисляется на основе целевого маршрута движения и целевой скорости движения рассматриваемого транспортного средства V1. Фактическая траектория T1 парковки обнаруживается на основе маршрута движения и скорости движения, связанных с фактической операцией парковки рассматриваемого транспортного средства V1. Опорная траектория T0 и фактическая траектория T1 парковки могут быть траекториями от местоположения PS1 начала парковки до целевого местоположения поворота для парковки PK0 и фактического местоположения поворота для парковки PK1, соответственно, или иначе могут быть траекториями с момента времени, когда рассматриваемое транспортное средство V1 начинает операцию парковки в местоположении PS1 начала парковки до момента времени, когда парковка завершена.
Порядок этапов S12 и S13, проиллюстрированный на фиг. 5 может быть изменен, или эти этапы могут выполняться одновременно.
[0051] Затем управление переходит на этап S14, на котором блок 12 определения состояния парковки устройства 100 помощи при парковке определяет на основе разницы между опорной траекторией T0 и фактической траекторией T1 парковки, то есть расстояния D2, как проиллюстрировано на фиг. 6, была ли или нет парковка неудачной, то есть нужна ли снова парковка в целевом парковочном месте 22. В частности, совокупное значение получается путем интегрирования расстояния D2 по времени, в течение которого рассматриваемое транспортное средство V1 достигает целевого местоположения поворота для парковки PK0 или фактического положения поворота для парковки PK1 из местоположения PS1 начала парковки, и когда совокупное значение не меньше, чем предварительно установленное пороговое значение оценки для процесса парковки, выполняется определение, что парковка не удалась, и снова необходима парковка в целевом парковочном месте 22. Дополнительно или альтернативно, совокупное значение может быть получено путем интегрирования расстояния D2 по времени с момента времени, когда рассматриваемое транспортное средство V1 начинает операцию парковки в местоположении PS1 начала парковки, до момента времени, когда парковка завершена, и когда совокупное значение не меньше чем предварительно установленное пороговое значение оценки для процесса парковки, может быть выполнено определение, что парковка не удалась. Дополнительно или альтернативно, когда максимальное значение расстояния D2 не меньше, чем предварительно установленное пороговое значение оценки для процесса парковки, может быть выполнено определение, что парковка не удалась.
[0052] Была ли или нет парковка неудачной может быть определено в момент времени в середине операции парковки рассматриваемого транспортного средства V1, например, во время поворота для парковки, или может иным образом быть определена в момент времени, когда парковка рассматриваемого транспортного средства V1 завершена. Термин «в середине операции парковки» относится к ситуации, в которой рассматриваемое транспортное средство V1 не достигло целевого парковочного места 22, и парковка не завершена.
Момент времени вывода информации указания для переключения режима парковки с ручного режима на автоматический режим может быть моментом времени (местоположением) поворота для парковки или моментом времени (местоположением), когда парковка рассматриваемого транспортного средства V1 завершена.
[0053] Как описано выше, в способе помощи при парковке согласно настоящему варианту осуществления, когда парковка рассматриваемого транспортного средства V1 выполняется в ручном режиме, устройство 100 помощи при парковке вычисляет опорную траекторию T0 в качестве целевого состояния парковки. Кроме того, устройство 100 помощи при парковке обнаруживает фактическую траекторию T1 парковки в качестве состояния выполнения парковки. Затем, на основе величины отклонения, то есть разницы между опорной траекторией T0 и фактической траекторией T1 парковки, устройство 100 помощи при парковке определяет, была ли или нет парковка неудачной, то есть необходима ли или нет снова парковка в целевом парковочном месте 22. При определении того, что парковка не удалась и снова необходима парковка в целевом парковочном месте 22, устройство 100 помощи при парковке выводит на дисплей 13 информацию указания для переключения режима парковки рассматриваемого транспортного средства V1 с ручного режима на автоматический режим. Посредством этой операции, когда происходит отклонение между опорной траекторией T0 и фактической траекторией T1 парковки, то есть когда выполняется определение, что парковка в ручном режиме не удалась, устройство 100 помощи при парковке указывает находящемуся в рассматриваемом транспортном средстве человеку, чтобы он знал, что режим парковки переключается на автоматический режим. Это позволяет устройству 100 помощи при парковке выполнять функцию автоматической парковки в соответствии с инструкцией, выполненной человеком, находящимся в рассматриваемом транспортном средстве, и устройство 100 помощи при парковке может помогать при парковке, так что рассматриваемое транспортное средство V1 может надежно парковаться в целевом местоположении P0 парковки на целевом парковочном месте 22.
[0054] Кроме того, в способе помощи при парковке согласно настоящему варианту осуществления устройство 100 помощи при парковке определяет, что парковка рассматриваемого транспортного средства V1 не удалась даже в середине операции парковки, то есть даже до того, как парковка завершена, и устройство 100 помощи при парковке может выводить информацию указания для переключения режима парковки на дисплей 13. Таким образом, устройство 100 помощи при парковке может помогать при парковке рассматриваемого транспортного средства V1 в соответствии с инструкцией, выполненной находящимся в рассматриваемом транспортном средстве человеком, даже в середине операции парковки, и может направлять рассматриваемое транспортное средство V1 в целевое местоположение P0 парковки в целевом парковочном месте 22, соответствующим образом корректируя траекторию парковки.
[0055] Кроме того, опорная траектория T0 вычисляется с использованием программы парковки, которая предварительно сохранена для выполнения автоматического режима, и поэтому опорная траектория T0 и фактическая траектория T1 парковки сравниваются друг с другом, тем самым дополнительно повышая точность определения, необходима ли или нет снова парковка в целевом парковочном месте 22.
[0056] Третий вариант осуществления
Способ помощи при парковке согласно третьему варианту осуществления настоящего изобретения будет описан со ссылкой на фиг. 6 и 7.
Как показано на фиг. 7, когда на этапе S1 выполняется определение, что режим парковки является ручным режимом, за этим этапом следует этап S22, на котором блок 5 вычисления целевого состояния парковки устройства 100 помощи при парковке вычисляет целевое местоположение поворота для парковки PK0, проиллюстрированной на фиг. 6. Целевое местоположение поворота для парковки PK0 является оптимальным местоположением поворота для парковки для рассматриваемого транспортного средства V1 в местоположении PS1 начала парковки для парковки в целевом положении P0 парковки на целевом парковочном месте 22 с одним поворотом для парковки. Затем управление переходит на этап S23, на котором блок 11 обнаружения состояния выполнения парковки устройства 100 помощи при парковке обнаруживает фактическое местоположение поворота для парковки PK1 рассматриваемого транспортного средства V1 вследствие фактической операции парковки рассматриваемого транспортного средства V1.
Порядок этапов S22 и S23, проиллюстрированный на фиг. 7 может быть изменен, или эти этапы могут выполняться одновременно.
[0057] Управление переходит на этап S24, на котором блок 12 определения состояния парковки устройства 100 помощи при парковке определяет на основе разницы между целевым местоположением поворота для парковки PK0 и фактическим местоположением поворота для парковки PK1, то есть расстояния D3, как показано на фиг. 6, была ли или нет парковка неудачной. То есть, когда расстояние D3 не меньше, чем предварительно установленное пороговое значение оценки для процесса парковки, выполняется определение, что парковка не удалась, и снова необходима парковка в целевом парковочном месте 22.
Была ли или нет парковка неудачной определяется в момент времени поворота для парковки рассматриваемого транспортного средства V1, и информация указания для переключения режима парковки с ручного режима на автоматический режим выводится также в момент времени поворота для парковки.
[0058] Как описано выше, в способе помощи при парковке согласно настоящему варианту осуществления, когда парковка рассматриваемого транспортного средства V1 выполняется в ручном режиме, устройство 100 помощи при парковке вычисляет целевое местоположение поворота для парковки PK0 в качестве целевого состояния парковки. Кроме того, устройство 100 помощи при парковке обнаруживает фактическое местоположение поворота для парковки PK1 в качестве состояния выполнения парковки. Затем на основе величины отклонения, то есть разницы между целевым местоположением поворота для парковки PK0 и фактическим местоположением поворота для парковки PK1, устройство 100 помощи при парковке определяет, была ли или нет парковка неудачной, что необходима ли или нет снова парковка в целевом парковочном месте 22. Когда выполнено определение, что парковка не удалась и снова необходима парковка в целевом парковочном месте 22, устройство 100 помощи при парковке выводит на дисплей 13 информацию указания для переключения режима парковки рассматриваемого транспортного средства V1 с ручного режима на автоматический режим. Посредством этой операции, когда происходит отклонение между целевым местоположением поворота для парковки PK0 и фактическим местоположением поворота для парковки PK1, то есть когда выполняется определение, что парковка в ручном режиме не удалась, и парковка в целевом парковочном месте 22 снова необходима, устройство 100 помощи при парковке указывает находящемуся в рассматриваемом транспортном средстве человеку, чтобы он знал, что режим парковки переключается на автоматический режим. Это позволяет устройству 100 помощи при парковке выполнять функцию автоматической парковки в соответствии с инструкцией, выполненной находящимся в рассматриваемом транспортном средстве человеком, и устройство 100 помощи при парковке может помогать при парковке рассматриваемого транспортного средства V1.
[0059] Кроме того, в способе помощи при парковке согласно настоящему варианту осуществления устройство 100 помощи при парковке определяет в момент времени поворота для парковки, что парковка рассматриваемого транспортного средства V1 не удалась, и снова необходима парковка в целевом парковочном месте 22, и устройство 100 помощи при парковке может выводить информацию указания для переключения режима парковки на дисплей 13. Таким образом, устройство 100 помощи при парковке может помогать при парковке рассматриваемого транспортного средства V1 в соответствии с инструкцией, выполненной находящимся в рассматриваемом транспортном средстве человеком, даже в середине операции парковки, и может направлять рассматриваемое транспортное средство V1 в целевое местоположение P0 парковки в целевом парковочном месте 22.
Устройство 100 помощи при парковке может определять на основе расстояния между целевым местоположением P0 парковки в целевом парковочном пространстве 22 и фактическим местоположением поворота для парковки PK1, необходима ли или нет снова парковка в целевом парковочном месте 22.
[0060] Четвертый вариант осуществления
Способ помощи при парковке согласно четвертому варианту осуществления настоящего изобретения будет описан со ссылкой на фиг. 6 и 8.
Как показано на фиг. 8, когда на этапе S1 выполняется определение, что режим парковки является ручным режимом, за этим этапом следует этап S32, на котором блок 5 вычисления целевого состояния парковки устройства 100 помощи при парковке вычисляет целевое местоположение поворота для парковки PK0, проиллюстрированной на фиг. 6. За этапом S32 следует этап S33, на котором блок 5 вычисления целевого состояния парковки вычисляет целевой угол A0 положения в целевом местоположении поворота для парковки PK0. Целевой угол A0 положения является оптимальным углом положения для рассматриваемого транспортного средства V1 для парковки в целевом положении P0 парковки в целевом парковочном месте 22 при движении назад. Угол положения представляет собой угол наклона рассматриваемого транспортного средства V1 относительно направления, в котором обращено рассматриваемое транспортное средство V1, когда оно находится в местоположении PS1 начала парковки, и представляет собой значение, которое указывает положение рассматриваемого транспортного средства V1.
[0061] Затем управление переходит на этап S34, на котором блок 11 обнаружения состояния выполнения парковки устройства 100 помощи при парковке обнаруживает фактический угол A1 положения в фактическом положении поворота для парковки PK1 на основе фактической операции парковки рассматриваемого транспортного средства V1.
Порядок этапов S32 и S33, проиллюстрированных на фиг. 8 может быть изменен, или эти этапы могут выполняться одновременно.
[0062] Управление переходит на этап S35, на котором блок 12 определения состояния парковки устройства 100 помощи при парковке определяет на основе разницы A0-A1 между целевым углом A0 положения и фактическим углом A1 положения, как проиллюстрировано на фиг. 6, была ли или нет парковка неудачной. То есть, когда расстояние A0-A1 не меньше, чем предварительно установленное пороговое значение оценки для процесса парковки, выполняется определение, что парковка не удалась.
Была ли или нет парковка неудачной определяется в момент времени поворота для парковки рассматриваемого транспортного средства V1, и информация указания для переключения режима парковки с ручного режима на автоматический режим выводится также в момент времени поворота для парковки.
[0063] Как описано выше, в способе помощи при парковке согласно настоящему варианту осуществления, когда парковка рассматриваемого транспортного средства V1 выполняется в ручном режиме, устройство 100 помощи при парковке вычисляет целевой угол A0 положения в качестве целевого состояния парковки. Кроме того, устройство 100 помощи при парковке обнаруживает фактический угол A1 положения в качестве состояния выполнения парковки. Затем на основе величины отклонения, то есть разницы между целевым углом A0 положения и фактическим углом A1 положения, устройство 100 помощи при парковке определяет, была ли или нет парковка неудачной, то есть необходима ли или нет снова парковка в целевом парковочном месте 22. Когда выполнено определение, что парковка не удалась и снова необходима парковка в целевом парковочном месте 22, устройство 100 помощи при парковке выводит на дисплей 13 информацию указания для переключения режима парковки рассматриваемого транспортного средства V1 с ручного режима на автоматический режим. Посредством этой операции, когда происходит отклонение между целевым углом A0 положения и фактическим углом A1 положения, то есть когда выполняется определение, что парковка в ручном режиме не удалась и снова необходима парковка в целевом парковочном месте 22, устройство 100 помощи при парковке указывает находящемуся в рассматриваемом транспортном средстве человеку, чтобы он знал, что режим парковки переключается на автоматический режим. Это позволяет устройству 100 помощи при парковке выполнять функцию автоматической парковки в соответствии с инструкцией, выполненной находящимся в рассматриваемом транспортном средстве человеком, и устройство 100 помощи при парковке может помогать при парковке рассматриваемого транспортного средства V1.
[0064] Кроме того, в способе помощи при парковке согласно настоящему варианту осуществления устройство 100 помощи при парковке определяет в момент времени поворота для парковки, что парковка рассматриваемого транспортного средства V1 не удалась, и снова необходима парковка в целевом парковочном месте 22, и устройство 100 помощи при парковке может выводить информацию указания для переключения режима парковки на дисплей 13. Таким образом, устройство 100 помощи при парковке может помогать при парковке рассматриваемого транспортного средства V1 в соответствии с инструкцией, выполненной находящимся в рассматриваемом транспортном средстве человеком, даже в середине операции парковки, и может направлять рассматриваемое транспортное средство V1 в целевое местоположение P0 парковки в целевом парковочном месте 22.
Устройство 100 помощи при парковке может определять, необходима ли или нет снова парковка в целевом парковочном месте 22, на основе фактического угла А1 положения без сравнения целевого угла А0 положения и фактического угла А1 положения друг с другом.
[0065] Целевой угол A0 положения в целевом местоположении поворота для парковки PK0 также является наклоном касательной линии L к опорной траектории T0. Следовательно, блок 11 обнаружения состояния выполнения парковки может обнаруживать в качестве состояния выполнения парковки разность A0-A1 между целевым углом A0 положения и фактическим углом A1 положения, то есть положение рассматриваемого транспортного средства V1 относительно касательной линии. L к опорной траектории T0. Это позволяет блоку 12 определения состояния парковки определять на основе положения рассматриваемого транспортного средства V1 относительно касательной линии L к опорной траектории T0, необходима ли или нет снова парковка в целевом парковочном месте 22. Кроме того, блок 12 определения состояния парковки может определять на основе положения рассматриваемого транспортного средства V1 относительно касательной линии L к опорной траектории T0, нужна ли или нет снова парковка в целевом парковочном месте 22, а не только в фактическом местоположении поворота для парковки PK1, но также и в любом текущем местоположении в середине операции парковки. В это время точка на опорной траектории T0, в которой касательная линия L вычисляется в качестве цели сравнения положения рассматриваемого транспортного средства V1, устанавливается в местоположение, которое обеспечивает кратчайшее расстояние от текущего местоположения рассматриваемого транспортного средства V1. Другими словами, на основе текущего местоположения или положения рассматриваемого транспортного средства V1 по отношению к целевому парковочному месту 22 определяется, необходима ли или нет снова парковка в целевом парковочном месте 22.
[0066] Дополнительно или альтернативно, блок 12 определения состояния парковки может определять на основе текущего местоположения рассматриваемого транспортного средства V1 относительно опорной траектории T0, необходима ли или нет снова парковка в целевом парковочном месте 22. То есть на основе кратчайшего расстояния (например, расстояния D2 на фиг. 6) между любым текущим местоположением рассматриваемого транспортного средства V1 в середине операции парковки и опорной траекторией T0 выполняется определение, необходима ли или нет снова парковка в целевом парковочном месте 22. Также в этом случае, другими словами, на основе текущего местоположения рассматриваемого транспортного средства V1 по отношению к целевому парковочному месту 22 выполняется определение, необходима ли или нет снова парковка в целевом парковочном месте 22.
[0067] Дополнительно или альтернативно, блок 12 определения состояния парковки может обнаруживать в качестве состояния выполнения парковки количество раз, когда находящийся в транспортном средстве человек управляет переключением передач рассматриваемого транспортного средства V1, чтобы переключаться между передним и задним ходом, и определять на основе количества раз, когда рассматриваемое транспортное средство V1 переключают между передним и задним ходом, необходима ли или нет снова парковка в целевом парковочном месте 22.
[0068] Определение того, необходима ли или нет снова парковка в целевом парковочном месте 22, может быть выполнено путем соответствующего комбинирования способов определения согласно вышеупомянутым вариантам осуществления с первого по пятый. В частности, баллы могут быть назначены результатам определения каждого способа определения, и на основе общего балла может быть выполнено определение, необходима ли или нет снова парковка в целевом парковочном месте 22. Результатам определения могут быть присвоены взвешенные баллы для соответствующих схем определения.
[0069] Пятый вариант осуществления
Способ помощи при парковке согласно пятому варианту осуществления настоящего изобретения будет описан со ссылкой на фиг. 3, 9, и 10.
Как показано на фиг. 9, когда на этапе S1 выполняется определение, что режим парковки является ручным режимом, за этим этапом следует этап S42, на котором блок 5 вычисления целевого состояния парковки устройства 100 помощи при парковке вычисляет пороговое значение для количества поворотов для парковки. Пороговое значение для количества поворотов для парковки представляет собой максимальное значение количества поворотов для парковки, которое позволено рассматриваемому транспортному средству V1 для плавной парковки в целевом местоположении P0 парковки в целевом парковочном месте 22.
[0070] Блок 5 вычисления целевого состояния парковки устройства 100 помощи при парковке вычисляет уровень сложности парковки для целевого парковочного места 22 на основании размера целевого парковочного места 22, показанного на фиг. 3, и вычисляет пороговое значение для количества поворотов для парковки на основе уровня сложности парковки.
[0071] Дополнительно или альтернативно, блок 5 вычисления целевого состояния парковки может обращаться к истории количества поворотов для парковки 40, проиллюстрированной на фиг. 10, и вычислять пороговое значение для количества поворотов для парковки на основе истории количества поворотов для парковки 40. История количества поворотов для парковки 40, хранящаяся в устройстве 100 помощи при парковке, представляет собой историю, которая записывает взаимосвязь между уровнем сложности парковки и количеством поворотов для парковки, которые выполнялись в прошлые разы, пока режим парковки рассматриваемого транспортного средства V1 не переключается с ручного режима на автоматический, или количеством поворотов для парковки, которые выполняются, пока парковка не будет успешной, при сохранении режима парковки на ручном режиме.
[0072] Как показано на фиг. 10, в истории количества поворотов для парковки 40, уровень сложности парковки, рассчитанный при прошлой ручной парковке, успех или неудача ручной парковки и количество поворотов для парковки, выполненных до успешной парковки или отказа, записываются так, чтобы были ассоциированы друг с другом. Успех ручной парковки относится к ситуации, в которой водитель может припарковать транспортное средство на целевом парковочном месте без переключения в автоматический режим, в то время как режим парковки находится в ручном режиме. Отказ относится к ситуации, в которой водитель сначала пытается припарковать транспортное средство на целевом парковочном месте, когда режим парковки находится в ручном режиме, но переключает режим парковки на автоматический режим в середине операции парковки. Когда пороговое значение количества поворотов для парковки вычисляется на основе истории количества поворотов для парковки 40, например, максимальное значение количества поворотов для парковки, выполненных до успешной парковки, рассчитывается в качестве порогового значения для количества поворотов для парковки в соответствии с уровнем сложности парковки. В примере, показанном на фиг. 10, поэтому, когда уровень сложности парковки «нормальный», пороговое значение для количества поворотов для парковки равно трем. С другой стороны, когда нет истории успешной парковки, например, минимальное значение количества поворотов для парковки до отказа рассчитывается в качестве порогового значения для количества поворотов для парковки. В примере, показанном на фиг. 10, поэтому, когда уровень сложности парковки «трудный», пороговое значение для количества поворотов для парковки также равно трем.
История количества поворотов для парковки 40 может быть набором фрагментов данных, записанных для рассматриваемого транспортного средства V1, или также может быть данными, ассоциированными с каждым элементом информации пользователя, когда существует множество пользователей рассматриваемого транспортного средства V1.
[0073] Впоследствии, после вычисления порогового значения для количества поворотов для парковки на этапе S42, управление переходит на этап S43, на котором блок 5 вычисления целевого состояния парковки подсчитывает и обнаруживает фактическое количество поворотов для парковки во время поворотов для парковки рассматриваемого транспортного средства V1.
Порядок этапов S42 и S43, проиллюстрированных на фиг. 9 может быть изменен, или эти этапы могут выполняться одновременно.
[0074] Управление переходит на этап S44, на котором блок 12 определения состояния парковки устройства 100 помощи при парковке сравнивает фактическое количество поворотов для парковки с пороговым значением для количества поворотов для парковки во время поворотов для парковки рассматриваемого транспортного средства V1 в любое время. Затем, на этапе S45, блок 12 определения состояния парковки определяет, успешно ли припарковалось рассматриваемое транспортное средство V1 с фактическим количеством поворотов для парковки, которое не превышает пороговое значение для количества поворотов для парковки. Когда рассматриваемое транспортное средство V1 успешно припарковано с фактическим количеством поворотов для парковки, которое не превышает пороговое значение для количества поворотов для парковки, управление завершается. С другой стороны, когда рассматриваемое транспортное средство V1 не было успешно припарковано с фактическим количеством поворотов для парковки, которое не превышает пороговое значение для количества поворотов для парковки, то есть когда фактическое количество поворотов для парковки превышает пороговое значение для количества поворотов для парковки, блок 12 определения состояния парковки определяет, что парковка не удалась, и управление переходит на этап S5.
[0075] Как описано выше, в способе помощи при парковке согласно настоящему варианту осуществления, когда парковка рассматриваемого транспортного средства V1 выполняется в ручном режиме, устройство 100 помощи при парковке вычисляет пороговое значение для количества поворотов для парковки в качестве целевого состояния парковки. Кроме того, устройство 100 помощи при парковке обнаруживает фактическое количество поворотов для парковки вследствие фактической операции парковки рассматриваемого транспортного средства V1 в качестве состояния выполнения парковки. Затем, когда фактическое количество поворотов для парковки превышает пороговое значение для количества поворотов для парковки, пока рассматриваемое транспортное средство V1 не завершит парковку, устройство 100 помощи при парковке определяет, что парковка рассматриваемого транспортного средства V1 не удалась, и парковка в целевом парковочном месте 22 необходима снова. Посредством этой операции устройство 100 помощи при парковке определяет во время поворота для парковки, что парковка рассматриваемого транспортного средства V1 не удалась, и может выводить информацию указания для переключения режима парковки на дисплей 13. Таким образом, устройство 100 помощи при парковке может помогать при парковке рассматриваемого транспортного средства V1 в соответствии с инструкцией, выполненной находящимся в рассматриваемом транспортном средстве человеком, даже в середине операции парковки, и может направлять рассматриваемое транспортное средство V1 в целевое местоположение P0 парковки в целевом парковочном месте 22.
[0076] Кроме того, устройство 100 помощи при парковке вычисляет уровень сложности парковки для целевого парковочного места 22 на основе размера целевого парковочного места 22, в котором рассматриваемое транспортное средство V1 должно припарковаться, или размера окружающего пространства 20a, смежного с целевым парковочным местом 22, и вычисляет пороговое значение для количества поворотов для парковки на основе уровня сложности парковки. Это позволяет устройству 100 помощи при парковке вычислять более подходящее пороговое значение для количества поворотов для парковки в соответствии с фактической ситуацией на парковке.
[0077] Кроме того, устройство 100 помощи при парковке вычисляет на основе истории количества поворотов для парковки 40 пороговое значение для количества поворотов для парковки в соответствии с уровнем сложности парковки. История количества поворотов для парковки 40 представляет собой историю, которая записывает взаимосвязь между уровнем сложности парковки и количеством поворотов для парковки, которые выполнялись в прошлые разы, пока режим парковки рассматриваемого транспортного средства V1 не переключается с ручного режима на автоматический режим, или количеством поворотов для парковки, которые выполняются, пока парковка не будет успешной, при сохранении режима парковки на ручном режиме. Это позволяет устройству 100 помощи при парковке вычислять более подходящее пороговое значение для количества поворотов для парковки не только на основании в соответствии с фактической ситуацией на парковке, но также на основе навыков вождения водителя.
Описание ссылочных позиций
[0078]
100 Устройство помощи при парковке
11 Блок обнаружения состояния выполнения парковки
12 Блок определения состояния парковки
13 Дисплей (пользовательский интерфейс)
15 контроллер
16 Датчики
20а Окружающее пространство
22 Целевое парковочное место
31, 32, 33 Отображение подтверждения
40 История количества поворотов для парковки
V1 Рассматриваемое транспортное средство
P1 Фактическое местоположение парковки
T0 Опорная траектория
T1 Фактическая траектория парковки
PK0 Целевое местоположение поворота для парковки
PK1 Фактическое местоположение поворота для парковки
A0 Целевой угол положения
A1 Фактический угол положения
L Касательная линия опорной траектории.





Изобретение относится к способам и устройству помощи при парковке. Технический результат заключается в отслеживании режима и управлении парковкой транспортного средства. В способе для выполнения помощи при парковке для рассматриваемого транспортного средства используется устройство помощи при парковке, содержащее контроллер, сконфигурированный для вывода информации помощи для находящегося в рассматриваемом транспортном средстве человека на основе информации о движении рассматриваемого транспортного средства, обнаруженной датчиком, при этом упомянутый способ подлежит выполнению контроллером и содержит этапы, на которых: определяют на основе информации о движении, выполняется ли парковка рассматриваемого транспортного средства в ручном режиме или автоматическом режиме, в котором управление парковкой выполняется для парковки рассматриваемого транспортного средства на целевом парковочном месте; когда парковка рассматриваемого транспортного средства выполняется в ручном режиме, обнаруживают состояние выполнения парковки рассматриваемого транспортного средства; определяют на основе состояния выполнения парковки, необходима ли или нет снова парковка в целевом парковочном месте; когда выполнено определение, что парковка в целевом парковочном месте снова необходима, выводят на пользовательский интерфейс информацию указания для переключения режима парковки рассматриваемого транспортного средства с ручного режима на автоматический режим; и, когда управление парковкой выполняется в автоматическом режиме, не выполняют управление для вывода информации указания для переключения режима парковки. 3 н. и 18 з.п. ф-лы, 10 ил.
1. Способ помощи при парковке для выполнения помощи при парковке для рассматриваемого транспортного средства с использованием устройства помощи при парковке, содержащего контроллер, сконфигурированный для вывода информации помощи для находящегося в рассматриваемом транспортном средстве человека на основе информации о движении рассматриваемого транспортного средства, обнаруженной датчиком, при этом упомянутый способ подлежит выполнению контроллером и содержит этапы, на которых:
определяют на основе информации о движении, выполняется ли парковка рассматриваемого транспортного средства в ручном режиме или автоматическом режиме, в котором управление парковкой выполняется для парковки рассматриваемого транспортного средства на целевом парковочном месте;
когда парковка рассматриваемого транспортного средства выполняется в ручном режиме, обнаруживают состояние выполнения парковки рассматриваемого транспортного средства;
определяют на основе состояния выполнения парковки, необходима ли или нет снова парковка в целевом парковочном месте;
когда выполнено определение, что парковка в целевом парковочном месте снова необходима, выводят на пользовательский интерфейс информацию указания для переключения режима парковки рассматриваемого транспортного средства с ручного режима на автоматический режим; и,
когда управление парковкой выполняется в автоматическом режиме, не выполняют управление для вывода информации указания для переключения режима парковки.
2. Способ помощи при парковке по п. 1, содержащий этапы, на которых:
обнаруживают текущее местоположение рассматриваемого транспортного средства относительно целевого парковочного места в качестве состояния выполнения парковки; и
определяют на основе текущего местоположения рассматриваемого транспортного средства относительно целевого парковочного места, необходима ли или нет снова парковка в целевом парковочном месте.
3. Способ помощи при парковке по п. 1 или 2, содержащий этапы, на которых:
обнаруживают положение рассматриваемого транспортного средства относительно целевого парковочного места в качестве состояния выполнения парковки; и
определяют на основе положения рассматриваемого транспортного средства относительно целевого парковочного места, необходима ли или нет снова парковка в целевом парковочном месте.
4. Способ помощи при парковке по любому из пп. 1-3, содержащий этапы, на которых:
вычисляют опорную траекторию для парковки рассматриваемого транспортного средства на целевом парковочном месте;
обнаруживают текущее местоположение рассматриваемого транспортного средства относительно опорной траектории в качестве состояния выполнения парковки; и
определяют на основе текущего местоположения рассматриваемого транспортного средства относительно опорной траектории, необходима ли или нет снова парковка в целевом парковочном месте.
5. Способ помощи при парковке по любому из пп. 1-4, содержащий этапы, на которых:
вычисляют опорную траекторию для парковки рассматриваемого транспортного средства на целевом парковочном месте;
обнаруживают положение рассматриваемого транспортного средства относительно касательной линии опорной траектории в качестве состояния выполнения парковки; и
определяют на основе положения рассматриваемого транспортного средства относительно касательной линии опорной траектории, необходима ли или нет снова парковка в целевом парковочном месте.
6. Способ помощи при парковке по п. 4 или 5, содержащий этап, на котором
вычисляют опорную траекторию по программе парковки, которая предварительно сохранена для выполнения автоматического режима.
7. Способ помощи при парковке по любому из пп. 1-6, содержащий этапы, на которых:
обнаруживают в качестве состояния выполнения парковки количество раз, когда находящийся в транспортном средстве человек выполняет переключение рассматриваемого транспортного средства, чтобы переключаться между передним и задним ходом; и
определяют на основе количества раз, когда рассматриваемое транспортное средство переключается между передним и задним ходом, необходима ли или нет снова парковка в целевом парковочном месте.
8. Способ помощи при парковке по любому из пп. 1-7, содержащий этапы, на которых:
вычисляют, в качестве целевого состояния парковки, целевое местоположение парковки, которое задано в целевом парковочном месте;
когда парковка рассматриваемого транспортного средства выполняется в ручном режиме, обнаруживают фактическое местоположение парковки после завершения парковки рассматриваемого транспортного средства в качестве состояния выполнения парковки; и
определяют на основе разницы между целевым местоположением парковки и фактическим местоположением парковки, необходима ли или нет снова парковка в целевом парковочном месте.
9. Способ помощи при парковке по любому из пп. 1-7, содержащий этапы, на которых:
когда парковка рассматриваемого транспортного средства выполняется в ручном режиме, вычисляют целевое местоположение поворота для парковки для рассматриваемого транспортного средства для парковки на целевом парковочном месте в качестве целевого состояния парковки и обнаруживают фактическое местоположение поворота для парковки вследствие фактической операции парковки рассматриваемого транспортного средства в качестве состояния выполнения парковки; и
определяют во время поворота для парковки на основе разницы фактического местоположения поворота для парковки по отношению к целевому местоположению поворота для парковки, необходима ли или нет снова парковка в целевом парковочном месте.
10. Способ помощи при парковке по п. 8 или 9, содержащий этап, на котором,
когда разница между состоянием выполнения парковки и целевым состоянием парковки не меньше, чем пороговое значение оценки, которое предварительно установлено для процесса парковки, определяют, что парковка в целевом парковочном месте необходима снова.
11. Способ помощи при парковке по п. 10, содержащий этапы, на которых:
вычисляют уровень сложности парковки для целевого парковочного места на основании размера целевого парковочного места или размера окружающего пространства, смежного с целевым парковочным местом; и
устанавливают пороговое значение оценки ниже, когда уровень сложности парковки выше, в то же время устанавливают пороговое значение оценки выше, когда уровень сложности парковки ниже.
12. Способ помощи при парковке по любому из пп. 1-11, содержащий этапы, на которых:
когда выполнено определение, что парковка в целевом парковочном месте снова необходима,
выводят информацию указания;
затем переключают режим парковки рассматриваемого транспортного средства с ручного режима на автоматический режим; и
выполняют управление парковкой для рассматриваемого транспортного средства для парковки на целевом парковочном месте.
13. Способ помощи при парковке по любому из пп. 1-12, содержащий этапы, на которых:
когда выполнено определение, что парковка в целевом парковочном месте снова необходима, выводят на пользовательский интерфейс информацию указания для переключения режима парковки рассматриваемого транспортного средства с ручного режима на автоматический режим, при этом информация указания включает в себя отображение подтверждения, с помощью которого возможно выбрать, переключать ли или нет режим парковки рассматриваемого транспортного средства с ручного режима на автоматический режим; и,
когда находящийся в рассматриваемом транспортном средстве человек выбирает, переключать ли или нет режим парковки рассматриваемого транспортного средства, на основе отображения подтверждения, выводят информацию, указывающую, что либо ручной режим, либо автоматический режим выбран, на пользовательский интерфейс на основе информации, выбранной находящимся в рассматриваемом транспортном средстве человеком.
14. Способ помощи при парковке по любому из пп. 1-13, в котором
информация указания включает в себя отображение подтверждения, с помощью которого возможно выбрать, переключать ли или нет режим парковки рассматриваемого транспортного средства с ручного режима на автоматический режим;
при этом упомянутый способ дополнительно содержит этапы, на которых:
когда находящийся в рассматриваемом транспортном средстве человек выбирает автоматический режим, выполняют управление парковкой для рассматриваемого транспортного средства, чтобы направиться к целевому парковочному месту; и,
когда находящийся в рассматриваемом транспортном средстве человек выбирает ручной режим, поддерживают режим парковки рассматриваемого транспортного средства на ручном режиме.
15. Способ помощи при парковке по любому из пп. 1-13, в котором
информация указания включает в себя отображение подтверждения, с помощью которого возможно выбрать, переключать ли или нет режим парковки рассматриваемого транспортного средства с ручного режима на автоматический режим;
при этом упомянутый способ дополнительно содержит этапы, на которых:
когда находящийся в рассматриваемом транспортном средстве человек выбирает автоматический режим, отображают вспомогательное изображение, указывающее целевое парковочное место; и,
когда находящийся в рассматриваемом транспортном средстве человек выбирает ручной режим, поддерживают режим парковки рассматриваемого транспортного средства на ручном режиме.
16. Способ помощи при парковке по любому из пп. 1-13, в котором
информация указания включает в себя отображение подтверждения, с помощью которого возможно выбрать, переключать ли или нет режим парковки рассматриваемого транспортного средства с ручного режима на автоматический режим;
при этом упомянутый способ дополнительно содержит этапы, на которых:
когда инструкция на переключение режима парковки рассматриваемого транспортного средства вводится в пользовательский интерфейс на основе отображения подтверждения, переключают режим парковки рассматриваемого транспортного средства с ручного режима на автоматический режим и выполняют управление парковкой для рассматриваемого транспортного средства, чтобы направиться к целевому парковочному месту; и,
когда инструкция на переключение режима парковки рассматриваемого транспортного средства не введена в пользовательский интерфейс на основе отображения подтверждения, поддерживают режим парковки рассматриваемого транспортного средства на ручном режиме.
17. Способ помощи при парковке по любому из пп. 13-16, содержащий этап, на котором
выводят отображение указания парковки вручную на пользовательский интерфейс, когда инструкция на переключение режима парковки рассматриваемого транспортного средства не введена в пользовательский интерфейс, и режим парковки рассматриваемого транспортного средства поддерживается на ручном режиме.
18. Способ помощи при парковке по п. 1, содержащий этапы, на которых:
вычисляют уровень сложности парковки для целевого парковочного места на основании размера целевого парковочного места или размера окружающего пространства, смежного с целевым парковочным местом;
обращаются к истории количества поворотов для парковки, которая записывает взаимосвязь между уровнем сложности парковки и количеством поворотов для парковки, которые выполнялись в прошлые разы до переключения режима парковки рассматриваемого транспортного средства с ручного режима на автоматический режим или количеством поворотов для парковки, которые выполнялись до успешного выполнения парковки с поддержанием режима парковки на ручном режиме;
вычисляют на основе истории количества поворотов для парковки пороговое значение для количества поворотов для парковки в соответствии с уровнем сложности парковки;
обнаруживают фактическое количество поворотов для парковки вследствие фактической операции парковки рассматриваемого транспортного средства в качестве состояния выполнения парковки; и,
когда фактическое количество поворотов для парковки рассматриваемого транспортного средства превышает пороговое значение для количества поворотов для парковки, пока рассматриваемое транспортное средство не завершит парковку, определяют, что парковка в целевом парковочном месте необходима снова.
19. Способ помощи при парковке по любому из пп. 1-16, содержащий этап, на котором
определяют на основе информации о движении, выполняется ли или нет парковка рассматриваемого транспортного средства в ручном режиме;
при этом, когда парковка рассматриваемого транспортного средства не выполняется в ручном режиме, состояние выполнения парковки не обнаруживают.
20. Способ помощи при парковке для выполнения помощи при парковке для рассматриваемого транспортного средства с использованием устройства помощи при парковке, содержащего контроллер, сконфигурированный для вывода информации помощи для находящегося в рассматриваемом транспортном средстве человека на основе информации о движении рассматриваемого транспортного средства, обнаруженной датчиком, при этом упомянутый способ подлежит выполнению контроллером и содержит этапы, на которых:
определяют на основе информации о движении, выполняется ли парковка рассматриваемого транспортного средства в ручном режиме или автоматическом режиме, в котором управление парковкой выполняется для парковки рассматриваемого транспортного средства на целевом парковочном месте;
когда парковка рассматриваемого транспортного средства выполняется в ручном режиме, обращаются к истории подсчета поворотов, которая записывает количество поворотов для парковки, которые выполнялись в прошлые разы до переключения режима парковки рассматриваемого транспортного средства с ручного режима на автоматический режим, или количество поворотов для парковки, которые выполнялись до успешного выполнения парковки с поддержанием режима парковки на ручном режиме;
вычисляют пороговое значение для количества поворотов для парковки на основе истории подсчета поворотов;
обнаруживают фактическое количество поворотов для периодов парковки посредством фактической операции парковки рассматриваемого транспортного средства;
когда фактическое количество поворотов для парковки превышает пороговое значение для количества поворотов для парковки, определяют, что парковка в целевом парковочном месте снова необходима, когда выполнено определение, что парковка в целевом парковочном месте снова необходима, выводят в пользовательский интерфейс информацию указания для переключения режима парковки рассматриваемого транспортного средства с ручного режима на автоматический режим.
21. Устройство помощи при парковке, содержащее контроллер, сконфигурированный для вывода информации помощи для находящегося в рассматриваемом транспортном средстве человека на основе информации о движении рассматриваемого транспортного средства, обнаруженной датчиком, при этом контроллер сконфигурирован для:
определения на основе информации о движении, выполняется ли парковка рассматриваемого транспортного средства в ручном режиме или автоматическом режиме, в котором управление парковкой выполняется для парковки рассматриваемого транспортного средства на целевом парковочном месте;
когда парковка рассматриваемого транспортного средства выполняется в ручном режиме, обнаружения состояния выполнения парковки рассматриваемого транспортного средства;
определения на основе состояния выполнения парковки, необходима ли или нет снова парковка в целевом парковочном месте;
когда выполнено определение, что парковка в целевом парковочном месте снова необходима, вывода на пользовательский интерфейс информации указания для переключения режима парковки рассматриваемого транспортного средства с ручного режима на автоматический режим; и,
когда управление парковкой выполняется в автоматическом режиме, невыполнения управления для вывода информации указания для переключения режима парковки.
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| Способ получения цианистых соединений | 1924 |
|
SU2018A1 |
| Станок для придания концам круглых радиаторных трубок шестигранного сечения | 1924 |
|
SU2019A1 |
| Пьезопривод | 2017 |
|
RU2647528C1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| СПОСОБ ОТОБРАЖЕНИЯ ИНФОРМАЦИИ СОДЕЙСТВИЯ ПРИ ПАРКОВКЕ И УСТРОЙСТВО СОДЕЙСТВИЯ ПРИ ПАРКОВКЕ | 2015 |
|
RU2691540C1 |
| СПОСОБ ОТОБРАЖЕНИЯ ИНФОРМАЦИИ ПОМОЩИ ПРИ ПАРКОВКЕ (ВАРИАНТЫ) И УСТРОЙСТВО ПОМОЩИ ПРИ ПАРКОВКЕ | 2015 |
|
RU2690790C1 |
| УСТРОЙСТВО ПОМОЩИ ПРИ ПАРКОВКЕ И СПОСОБ ПОМОЩИ ПРИ ПАРКОВКЕ | 2015 |
|
RU2668786C1 |
