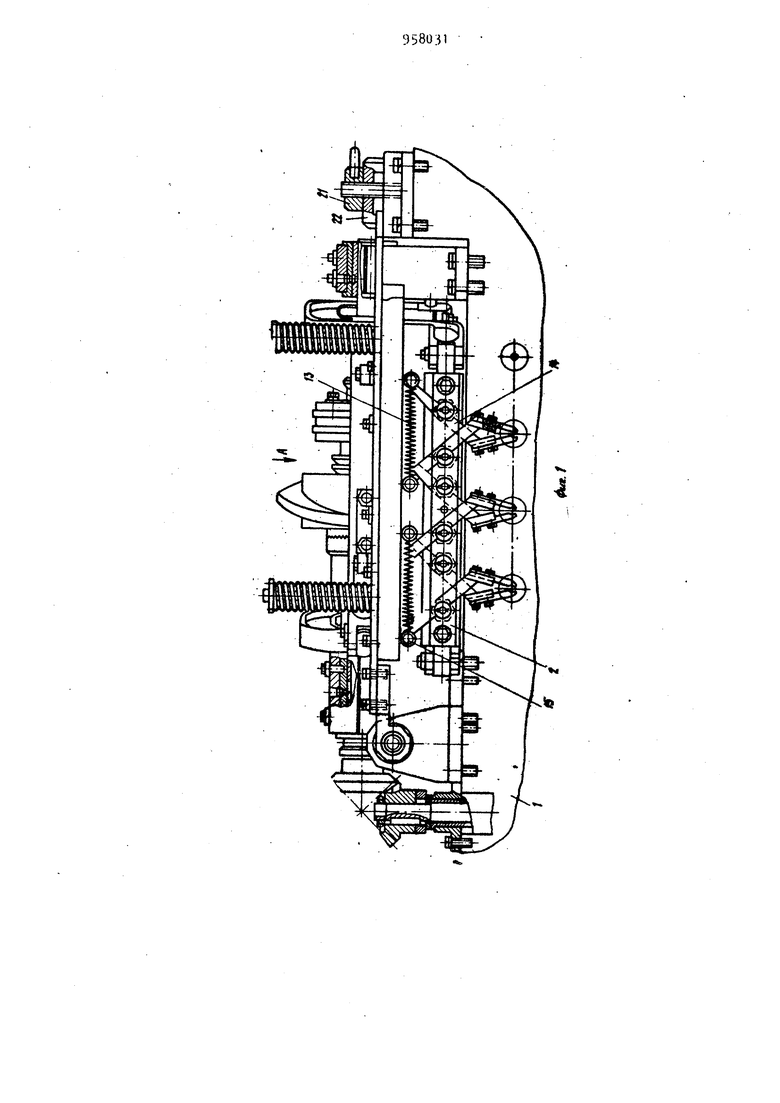
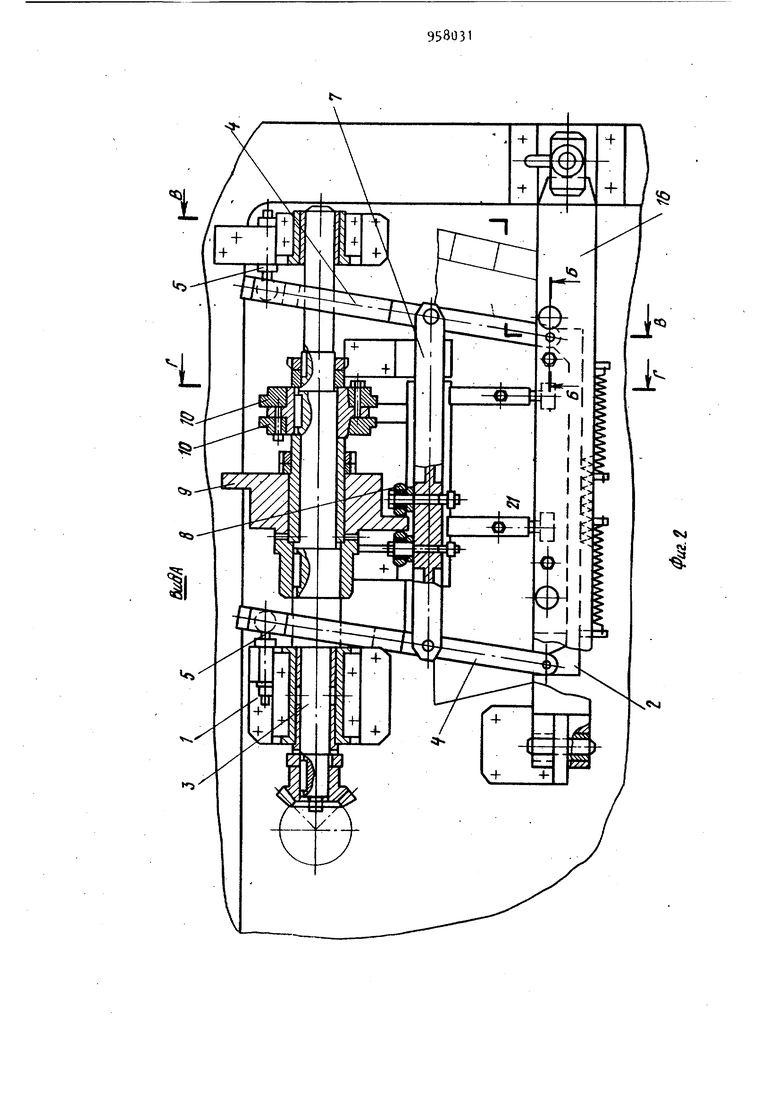
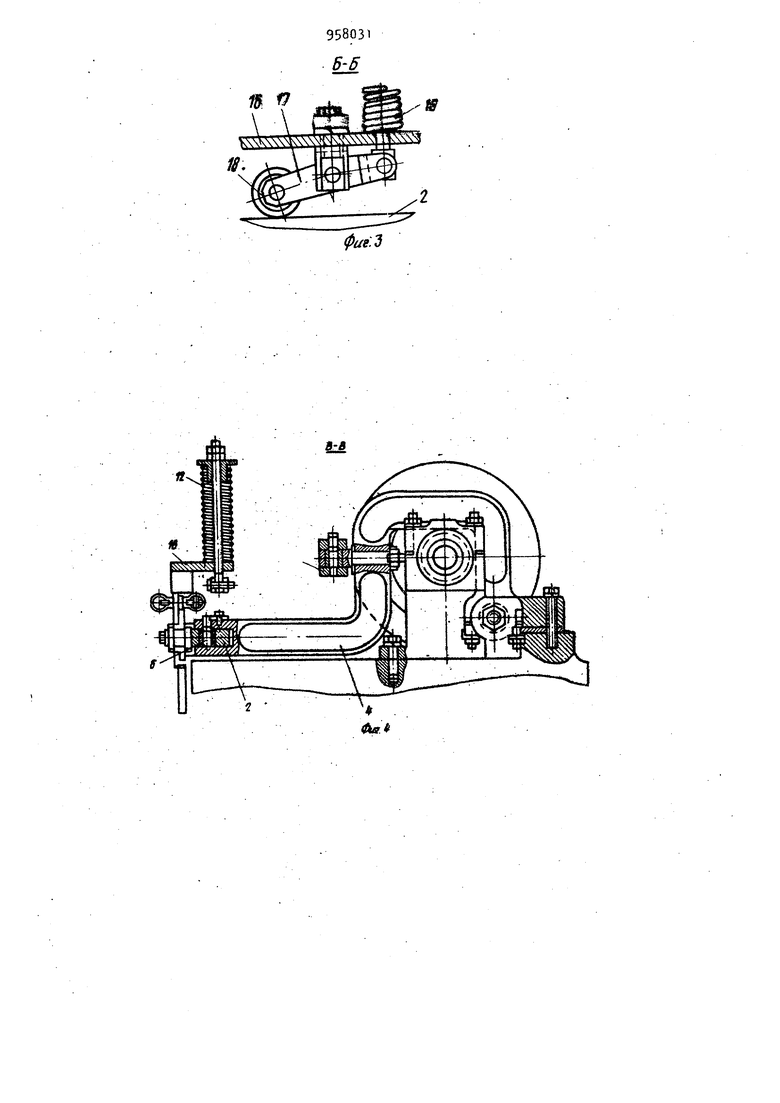
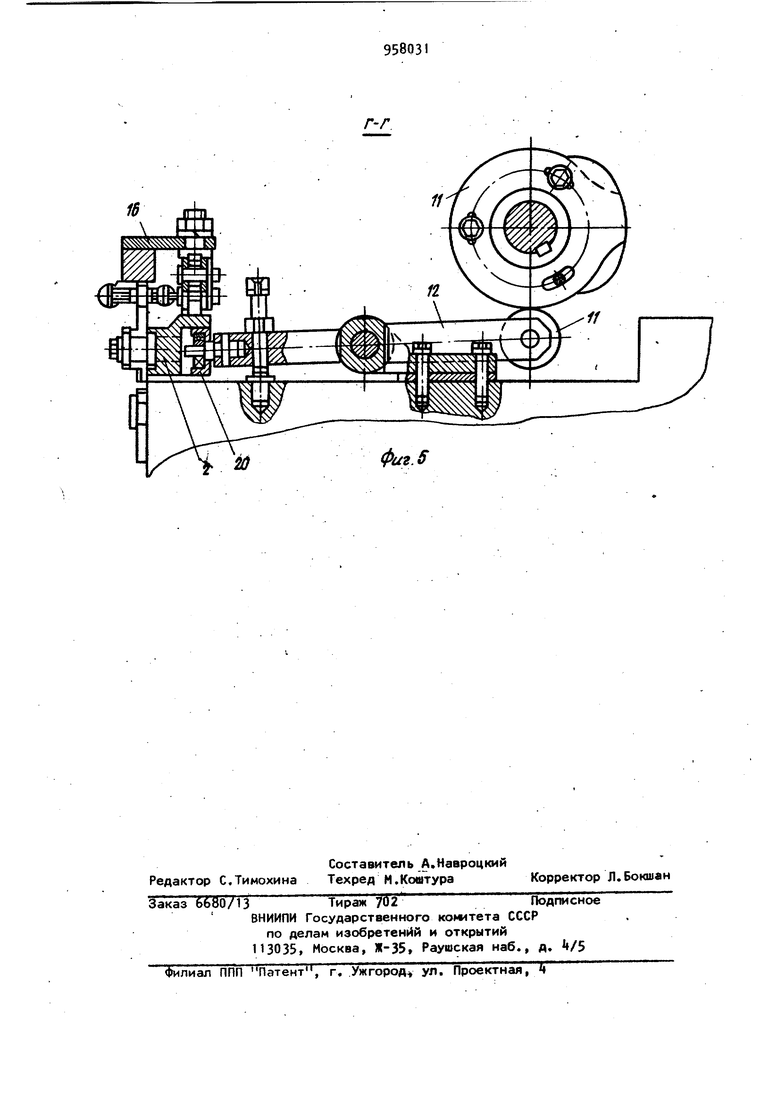
(5) УСТРОЙСТВО для ПЕРЕНОСА ЗАГОТОВОК В МНОГОПОЗИЦИОННОМ ВЫСАДОЧНОМ, Изобретение относится к кузнечно-прессовому машиностроению, а именно к устройствам для переноса з готовок в многопозиционном высадочном автомате. Известно устройство для переноса заготовок в многопозиционном высадо ном автомате, содержащее смонтированные на станине каретку с приводо в виде кулачкового вала, связанного с ней через промежуточные элементы, а также захваты в виде шарнирно закрепленных на каретке двуплечих рычагов с роликами на концах, взаимодействующими через планку с приводным кулацком II , Недостатком известного устройства является относительно низкая надежность его работы из-за сложной конструкции ввиду наличия сложных кинематических звеньев в виде второ го кулачкового вала, а также относительно низкая производительность. АВТОМАТЕ Целью изобретения является повышение надежности и производительности. Поставленная цель достигается тем, что в устройстве для переноса заготовок в многопозиционном высадочном автомате, содержащем смонтированные на станине каретку с приводом в виде кулачкового вала, связанного с ней через промежуточные элементы, а также захваты в виде шарнирно закрепленных на каретке двуплечих рычагов с роликами на концах, взаимодействующими через планку с приводным кулачком, промежуточный элемент выполнен в виде параллельных двуплечих рычагов, шарнирно связанных одними концами со станиной, а другими - с кареткой, при этом указанные рычаги шарнирно соединены между собой шатуном с закрепленными на неК роликами, взаимодействуюи ин с приводным кулачком, который закреплен на кулачковое валу привода каретки. Параллельные рычаги связаны со. станиной сферическими шарнирами. На фиг. 1 схематически показано предлагаемое устройство, общий вид; на фиг, 2 - вид А на фиг. 1; на фиг разрез Б-Б на фиг. 2, на фиг. разрез В-В на фиг. 2; на фиг. 5 разрез Г-Г на фиг. 2. Устройство для переноса заготовок в многопозиционных высадочных автоматах содержит смонтированную на ста нине 1 каретку 2, связанную с приводом в виде кулачкового вала 3 через промежуточный элемент, состоящий из двух параллельных рычагов , шарнирно связанных одними концами со станиной 1 сферическими шарнирами 5 а другими - с кареткой 2 посредством осей 6. Параллельные рычаги 4 шарнирно соединены между собой шатуном 7, на котором закреплены ролики 8, контактирующие с приводным кулачком 9, закрепленном на кулачковом валу 3. На кулачковом валу 3 установлен кулачок 10, контактирующий с роликом 11, закрепленным на одном конце коромысла 12, связанного с кареткой 2. Захваты для заготовок выполнены в виде шарнирно закрепленных на каретке 2 подпружиненных пружиной 13 двуплечих рычагов 14 с роликами 15 на концах, взаимодействующими при раскрытии рычагов с .траверсой 16. При этом траверса 16 соединена со станиной одним концом шарнирно, а другим - с помощью прихвата и гайки, что обеспечивает возможность по ворота траверсы при необходимости вокруг шарнира и освобождения подхо да к матрично 4У блоку. Для возврата каретки 2 в исходное прложение на концах траверсы 16 расположены рычаги 17 с роликами 18 на одном ко це и .пружиной 19 на другом конце. при этом ролики взаимодействуют с к реткой 2. Устройство-работает следующим об разом. После выталкивания штампуемой за готовки из матрицы (не показана) на некоторую величину захвата двупл чие рычаги 14 закрываются и зажимав ют заготовку с усилием пружины 13. Движение на закрытие двуплечих рычагов 14 захватов пер1г дается-от вал 3 через кулачки 10, ролик 11 и коромысло 12. При этом ролик 11.переходит на наименьший радиус кулачка 12, а каретка 2 под действием пружин 19 опускается в нижнее положение, которое ограничиваете винтом. В этом положении каретки 2 ролики несколько отходят от траверсы 16, благодаря чему под действием пружин 13 рычаги захвата 14 зажимают заготовку. Затем в определенное время, определяемое циклом работы, каретка 2 перемещается в рабочее положение. Это перемещение равно расстоянию между матрицами. /Движение на перемещениелкаретки 2 передается от кулачка 9 через ролики В и рычаги 4. При этом каретка 2 свои направляющими опирается на ролики 18 и 20. После прихода каретки 2 в рабочее положение перенесенные на HOBbie позиции заготовки заталкиваются пуансонами, установлен- ,. ными на ползуне автомата, в матрицы (не показаны). После заталкивания заготовок на некоторую величину двуплечие рычаги 14 захвата, удерживающие заготовку, расжимаются.Расжатие рычагов 14 захвата осуществляется от кулачков 10. В это время ролик 11 набегает на выступающую часть кулачков 10, коромысло 12 поворачивается вокруг оси и через ролики 20 поднимает каретку 2 вверх, сжимая через ролики 18 и рычаги 17 пружины 19. Ролики 15 при этом упираются в траверсу 16, в результате чего рычаги 14 захвата расжимаются, освобождая заготовку. При подъеме вверх каретки 2 одновременно поворачиваются относительно шарниров 5 рычаги 4. В это время происходит штамповка заготоБОК на рабочих позициях. На первую же позицию подается отрезанная заготовка отрезным ножом (не показан). После отхода пуансонов от матриц на величину, равную толщине захватов каретка 2 снова приводится в исходное положение, рычаги 14 захватов в это время находятся в расжатом состоянии. После остановки каретки в исходном положении устройство подготовлено к повторению рабочего цикла. Для смены штамповочных матриц требуется полностью освободить матричный блок, который сверху и со стороны штамповки перекрыт механиз юм переноса. Для этого поворотом гайки 21 и прихвата 22 освобождается траверса 16, после чего она откидывается в сторону, поворачиваясь вокруг оси. Затем каретка 2 вместе с рычагами. и шатуном 7 откидывается поворотом вокруг сферического шарнира 5f освобождая зону матричного блока для смены матриц. При этом не требуется отсоединения каретки 2 от ее привода.
Предложенное устройство по сравнению с известным обладает повышенной надежностью работы благодаря уменьшению количества звеньев, а также производительностью.
Формула изобретения
1.Устррйство для переноса заготовок в многопозиционном высадочном автомате, содержащее смонтированные на станине каретку с приводом в виде кулачкового вала, связанного с ней через промежуточные элементы а Также захваты в виде шарнирио закрепленных на каретке двуплечих рычагов с роликами на концах, взаимодействующими через планку с приводным кулачком, отли чающееся тем, что, с целью повышения надежности работы и произдодительности, промежуточный элемент выполнен в виде параллельных рычагов, шарнирно связанных одними концами со станиной, а другими..- с кареткой, при этом указанные рычаги шармирно соединены между собой шатуном с закрепленными на нем роликами, взаимодействующими с приводным кулачком, который закреплен на кулачковом валу
привода каретки.
2, Устройство по п. 1, отличающееся тем, что параллельные рычаги связаны .со станиной сферическими шарнирами.
Источники информации,
принятые во внимание при экспертизе
1. Холодная объемная штамповка. Справочник под редакцией Г.А.Навроцкого, Машиностроение, 1973,-с. 380, рис. 28 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТ ГОРЯЧЕВЫСАДОЧНЬШ ДЛЯ ИЗГОТОВЛЕНИЯ ФАСОННЫХ ДЕТАЛЕЙ, НАПРИМЕР ГАЕК | 1965 |
|
SU176476A1 |
| МЕХАНИЗМ ПЕРЕНОСА МНОГОПОЗИЦИОННОГО ВЫСАДОЧНОГО АВТОМАТАФОНДбис; | 1972 |
|
SU430933A1 |
| Устройство для переноса заготовок к многопозиционному высадочному автомату | 1986 |
|
SU1412874A1 |
| МЕХАНИЗМ ПЕРЕНОСА МНОГОПОЗИЦИОННЫХ ХОЛОДНОВЫСАДОЧНЫХ АВТОМАТОВ | 1973 |
|
SU366912A1 |
| Устройство переноса заготовок к многопозиционным штамповочным автоматам | 1988 |
|
SU1503969A1 |
| МЕХАНИЗМ ПЕРЕНОСА ЗАГОТОВОК КМНОГОПОЗНЦИОННЫМ ВЫСАДОЧНЫМ ПРЕССАМ-АВТОМАТАМ | 1972 |
|
SU432706A3 |
| Механизм переноса заготовок | 1976 |
|
SU664738A1 |
| МНОГОПОЗИЦИОННЫЙ ХОЛОДНО-ВЫСАДОЧНЫЙ АВТОМАТ | 1973 |
|
SU378278A1 |
| Устройство для переноса заготовок к многопозиционному высадочному автомату | 1976 |
|
SU647053A1 |
| Устройство для высадки | 1981 |
|
SU996027A1 |
&
Isll ---
4;HS«v
:||н1$: 11 ) :1|Я| Я
2
il9:«
фиг.5
