ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение касается портальных погрузчиков.
УРОВЕНЬ ТЕХНИКИ
Портальный погрузчик представляет собой транспортное средство, применяемое, например, в портовых терминалах и на погрузочных площадках для складирования и перемещения интермодальных контейнеров. Портальные погрузчики поднимают и перемещают контейнеры, охватывая груз с двух сторон, и в зависимости от грузоподъемности способны складировать контейнеры штабелями высотой до четырех контейнеров. Они могут передвигаться с груженым контейнером на относительно низкой скорости (обычно до 30 км/час) и в целом не предназначены для езды по дорогам.
Традиционные портальные погрузчики имеют четыре ходовых колеса. Если погрузчик работает не на горизонтальной поверхности, то ему требуется система подвески, обеспечивающая постоянный контакт всех четырех колес с землей. Однако из соображений стоимости у большинства портальных погрузчиков система подвески отсутствует. При отсутствии системы подвески колесо может потерять контакт с землей, в результате чего теряется тяговое усилие, тормозное усилие и снижается устойчивость.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение предлагает портальный погрузчик, содержащий раму с расположенными напротив друг друга практически параллельными сторонами и с конфигурацией, которая позволяет охватывать контейнер для подъема и транспортировки, удерживая его между указанными противоположными сторонами, множество ходовых колес, позволяющих располагать раму над контейнером, а также средство для подъема контейнера внутри рамы, при этом ходовые колеса содержат первое ходовое колесо, расположенное по меньшей мере приблизительно по центру с одной стороны рамы, а также второе и третье ходовые колеса, расположенные на противоположных краях другой стороны рамы или рядом с ними, при этом второе и третье колеса способны поворачиваться вокруг соответствующих практически вертикальных осей.
В предпочтительном варианте воплощения изобретения первое колесо не способно поворачиваться, а его ось вращения проходит по ширине шасси.
Предпочтительно поворот погрузчика осуществляется синхронным поворотом второго и третьего колес вокруг их вертикальных осей практически на равные углы в противоположных направлениях.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Ниже в качестве примера описан один из вариантов воплощения настоящего изобретения со ссылками на сопутствующие чертежи, где:
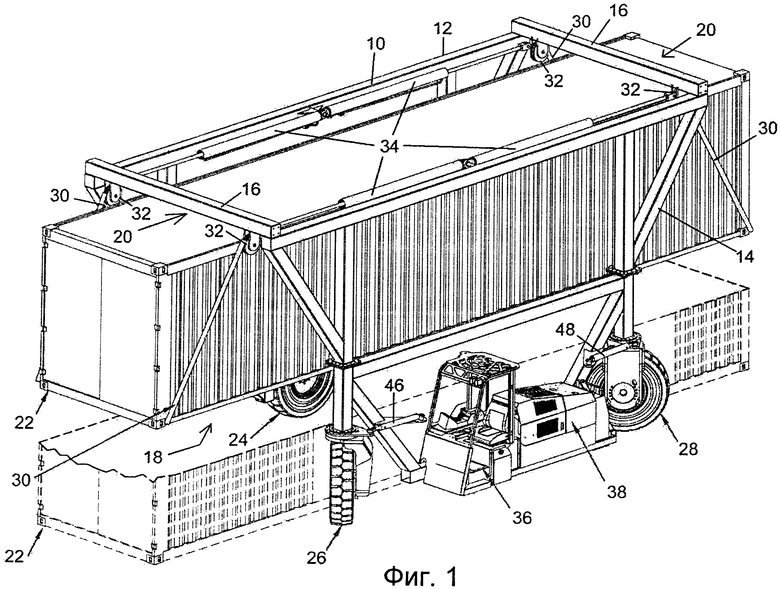
На Фигуре 1 представлен вид в перспективе портального погрузчика по данному варианту воплощения изобретения.
На Фигурах 2(А) - 2(С) схематично показаны виды сверху погрузчика по Фиг.1, иллюстрирующие выполнение поворота в различных направлениях.
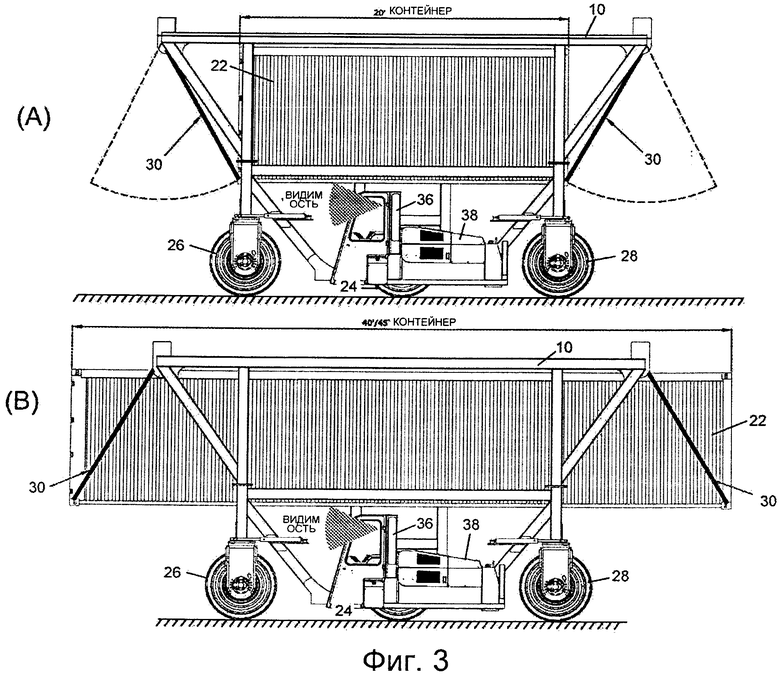
На Фигурах 3(А) и 3(В) показаны виды сбоку погрузчика, поднимающего грузы различной длины.
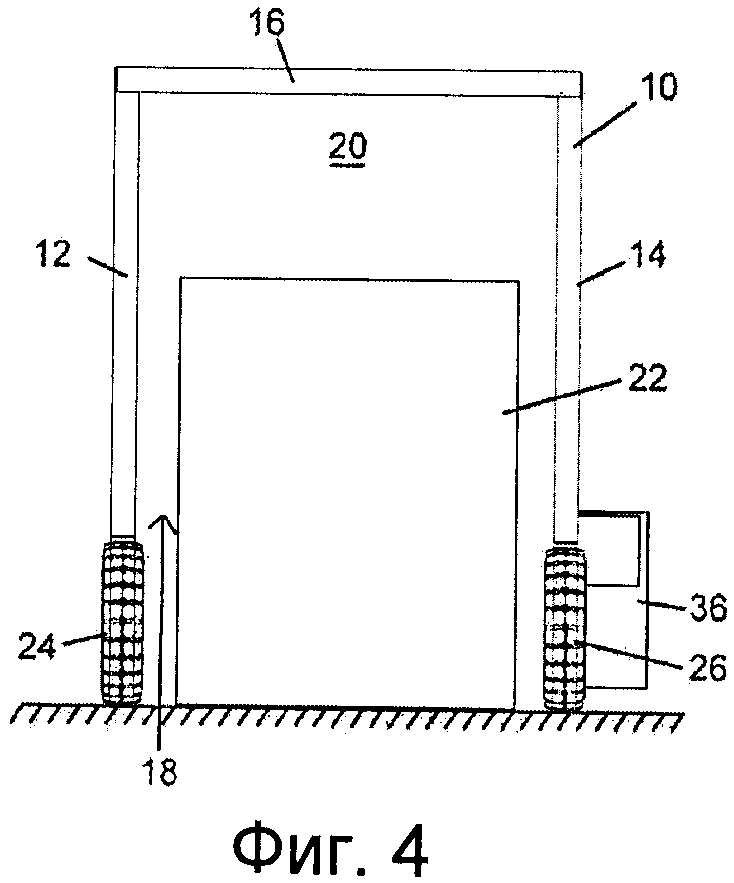
На Фигуре 4 схематично показан вид с торца погрузчика по Фигуре 1.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ВОПЛОЩЕНИЯ ИЗОБРЕТЕНИЯ
Как показано на чертежах, портальный погрузчик содержит стальную раму 10, которая на виде с торца по Фиг.4 в целом имеет вид перевернутой буквы "U". Рама 10 имеет расположенные напротив друг друга практически параллельные стороны 12, 14, соединяющиеся на вершине траверсами 16, открытое основание 18 и расположенные напротив друг друга открытые торцы 20. Такая конструкция образует подобие тоннеля, что позволяет раме охватывать контейнер 22 для того, чтобы поднимать его и транспортировать. На Фиг.1 (пунктирные линии) и на Фиг.4 контейнер 22 показан стоящим на земле, а на Фиг.1 (сплошные линии) и на Фиг.3 контейнер 22 показан в поднятом положении внутри рамы. Рама 10 смонтирована на трех ходовых колесах 24, 26 и 28, таким образом, чтобы она могла перемещаться над контейнером 22, стоящим на земле, как показано на Фиг.4. Конструкция и работа колес 24-28 будет подробно описана ниже.
Контейнер 22 крепится к раме четырьмя гибкими стальными элементами 30, например цепями или тросами. В процессе работы один конец каждого из элементов 30 прикреплен к соответствующему углу днища контейнера 22, а сам элемент 30 проходит через соответствующий шкив 32 на верху рамы 10, где его второй конец прикреплен к одному концу соответствующего гидравлического цилиндра 34. Путем втягивания цилиндров 34 контейнер 22 можно поднимать с земли для транспортировки (Фигуры 1 и 3), а путем выдвижения цилиндров контейнер можно опускать обратно на землю, как показано на Фигурах 1 и 4 (элементы 30 на Фиг.4 не показаны).
Поскольку гибкие элементы 30 могут отклоняться на угол, показанный пунктирными линиями на Фиг.3 (А), их можно прикреплять к контейнерам 22 различной длины, как показано на Фигурах 3 (А) и 3 (В), таким образом, погрузчик способен поднимать и транспортировать грузы различной длины. Кроме того, этот портальный погрузчик способен снимать контейнеры с транспортирующих машин и ставить их на эти машины или складировать контейнеры штабелями высотой по два или больше, при условии, что высота внутреннего зазора рамы 10 достаточна для подъема контейнера на требуемую высоту. Для осуществления транспортировки контейнер 22 можно поднять до самой верхушки рамы 10, где он будет плотно прижат снизу к траверсам 16. Это обеспечивает надежность и устойчивость крепления контейнера.
Работой портального погрузчика управляет оператор, который сидит в кабине 36, смонтированной снаружи по отношению к раме 10 между колесами 26, 28. Позади кабины 36 находится гидравлический силовой агрегат 38, который под управлением оператора прикладывает гидравлическое усилие к цилиндрам 34 по гидравлической цепи (не показано). Оператор из кабины 36 может поднимать и опускать контейнер 22 посредством втягивания и выдвигания цилиндров 34 известным способом. Контейнер 22 можно поднять достаточно высоко для того, чтобы оператору хорошо было видно пространство под контейнером, см. Фиг.3.
Ходовые колеса портального погрузчика содержат одно колесо 24, расположенное под стороной 12, по меньшей мере приблизительно по центру между противоположными открытыми торцами 20 рамы 10, а также два колеса 26, 28, которые расположены под стороной 14 на открытых торцах рамы или рядом с ними. Эти три колеса образуют приблизительно равнобедренный треугольник, вершиной которого является колесо 24, а основание вытянуто от колеса 26 до колеса 28. Колесо 24 зафиксировано, т.е. не может поворачиваться, а его ось вращения Х (Фигура 3) проходит по ширине рамы перпендикулярно сторонам 12, 14. Однако каждое из колес 26, 28 может изменять направление движения путем поворота вокруг соответствующих практически вертикальных осей 40 и 42.
Поворот колес 26, 28 синхронизирован таким образом, что оператор, поворачивая рулевое колесо 44 в кабине 36, вынуждает колеса 26, 28 поворачиваться вокруг их вертикальных осей 40, 42 практически на одинаковый угол в противоположных направлениях. Поворот управляемых колес 26, 28 вокруг их вертикальных осей осуществляется гидравлическими цилиндрами 46, 48, связанными с гидравлическим силовым агрегатом 38, а управление поворотом осуществляется рулевым колесом 44. Направление и величина угла поворота рулевого колеса 44 определяют, в каком направлении и на какой угол повернутся колеса 26,28 вокруг своих вертикальных осей.
Кроме гидравлических цепей, необходимых для работы подъемных цилиндров 34 и рулевых цилиндров 46 и 48, погрузчик также содержит гидравлическую цепь, подключенную к одному или более приводных гидродвигателей, связанных, соответственно, с одним или более колес 24-28, для того чтобы осуществлять движение погрузчика по земле под управлением оператора. Приводной гидродвигатель (гидродвигатели) и приводные гидравлические цепи здесь не показаны, однако квалифицированному специалисту хорошо известны способы их применения.
Как показано на Фиг.2, при движении прямо вперед (Фиг.2 (А)) все три колеса расположены параллельно сторонам 12, 14. Если при движении вперед оператор повернет рулевое колесо 44 по часовой стрелке, портальный погрузчик повернет по часовой стрелке (Фиг.2 (В)), при этом колеса 26, 28 повернутся на одинаковые углы в противоположных направлениях. Если при движении вперед оператор повернет рулевое колесо 44 против часовой стрелки, портальный погрузчик повернет против часовой стрелки (Фиг.2 (С)), при этом колеса 26, 28 опять повернутся на одинаковые углы в противоположных направлениях (но в этом случае направление поворота каждого колеса будет противоположным тому, что было при повороте погрузчика по часовой стрелке). При повороте на предельное значение, соответствующее положениям колес, показанным на Фигурах 2 (В) и 2 (С), погрузчик может поворачиваться вокруг своей оси.
В одной из модификаций представленного выше варианта воплощения изобретения одно или более из колес 24, 26 и 28 может содержать пару колес, расположенных вплотную друг к другу на одной оси, при этом такая колесная пара вращается и/или поворачивается как одна деталь.
В другой модификации кабину оператора можно убрать, а управление погрузчиком осуществлять дистанционно.
В представленном выше варианте воплощения изобретения ходовые колеса вращаются под воздействием приводных гидродвигателей (не показано) и поворачиваются под воздействием гидравлических цилиндров 46 и 48, а гибкими стальными подъемными элементами 30 управляют гидравлические цилиндры 34, при этом все указанные механизмы получают энергию от гидравлического силового агрегата 38, однако в альтернативном варианте любой их этих механизмов или все они могут работать от электрических двигателей, получающих питание от мощных аккумуляторных батарей, находящихся в блоке 38.
Три главных преимущества описанного выше трехколесного портального погрузчика состоят в том, что:
1. Не нужна система подвески. Все три колеса остаются в контакте с землей, независимо от формы рельефа.
2. Сохраняется тяговое и тормозное усилие. Все три колеса остаются в контакте с землей, независимо от формы рельефа, следовательно, ни у одного из колес не ослабевает тяговое или тормозное усилие.
3. Такой погрузчик является более маневренным. Погрузчик со своим грузом способен поворачиваться вокруг своей оси.
Настоящее изобретение не ограничивается описанными здесь вариантами его воплощения, которые можно модифицировать или варьировать, не выходя за пределы объема настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Мобильный портальный транспортер | 2023 |
|
RU2796172C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ЗАГРУЗКИ МОРСКОГО КОНТЕЙНЕРА С УДЛИНЕННЫМ ТЯЖЕЛЫМ ГРУЗОМ ИЛИ РЯДОМ ТЯЖЕЛЫХ ГРУЗОВ | 2015 |
|
RU2685497C2 |
| Рабочая машина с усовершенствованными стабилизаторами | 2020 |
|
RU2801011C2 |
| СИСТЕМА ПОДВЕСКИ ДЛЯ ГУСЕНИЧНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2302969C2 |
| ТРАКТОР | 2001 |
|
RU2255869C2 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ И ПОГРУЗКИ И РАЗГРУЗКИ МАТЕРИАЛА И СПОСОБ ЕГО ЭКСПЛУАТАЦИИ (ВАРИАНТЫ) | 2003 |
|
RU2365711C2 |
| ДВУХГУСЕНИЧНЫЙ ТРАКТОР | 2013 |
|
RU2607932C2 |
| СПОСОБ УПРАВЛЕНИЯ МАШИНОЙ ДЛЯ ПЕРЕМЕЩЕНИЯ МАТЕРИАЛОВ | 2014 |
|
RU2698756C2 |
| ШАРНИРНОЕ ТРАНСПОРТНОЕ УСТРОЙСТВО ДЛЯ ВИНДРОУЭРА С ЖАТКОЙ | 2009 |
|
RU2508620C2 |
| РАБОЧАЯ МАШИНА (ВАРИАНТЫ) И РУЛЕВОЕ УСТРОЙСТВО ДЛЯ ТАКОЙ МАШИНЫ | 2008 |
|
RU2488261C2 |
Изобретение относится к портальным погрузчикам. Портальный погрузчик содержит раму (10), имеющую практически параллельные противоположные стороны (12,14) и конфигурацию, позволяющую охватывать контейнер с двух сторон. Погрузчик имеет три ходовых колеса (24, 26) и (28), позволяющих располагать раму над контейнером. Ходовые колеса включают первое ходовое колесо (24), расположенное по меньшей мере приблизительно по центру на одной стороне (12) рамы, а также второе и третье ходовые колеса (26, 28), расположенные на противоположных краях другой стороны (14) рамы. Второе и третье колеса (26, 28) способны изменять направление путем поворота вокруг своих соответствующих практически вертикальных осей (40, 42). Достигается упрощение конструкции, высокая маневренность и устойчивость в работе погрузчика с грузом. 5 з.п. ф-лы, 7 ил.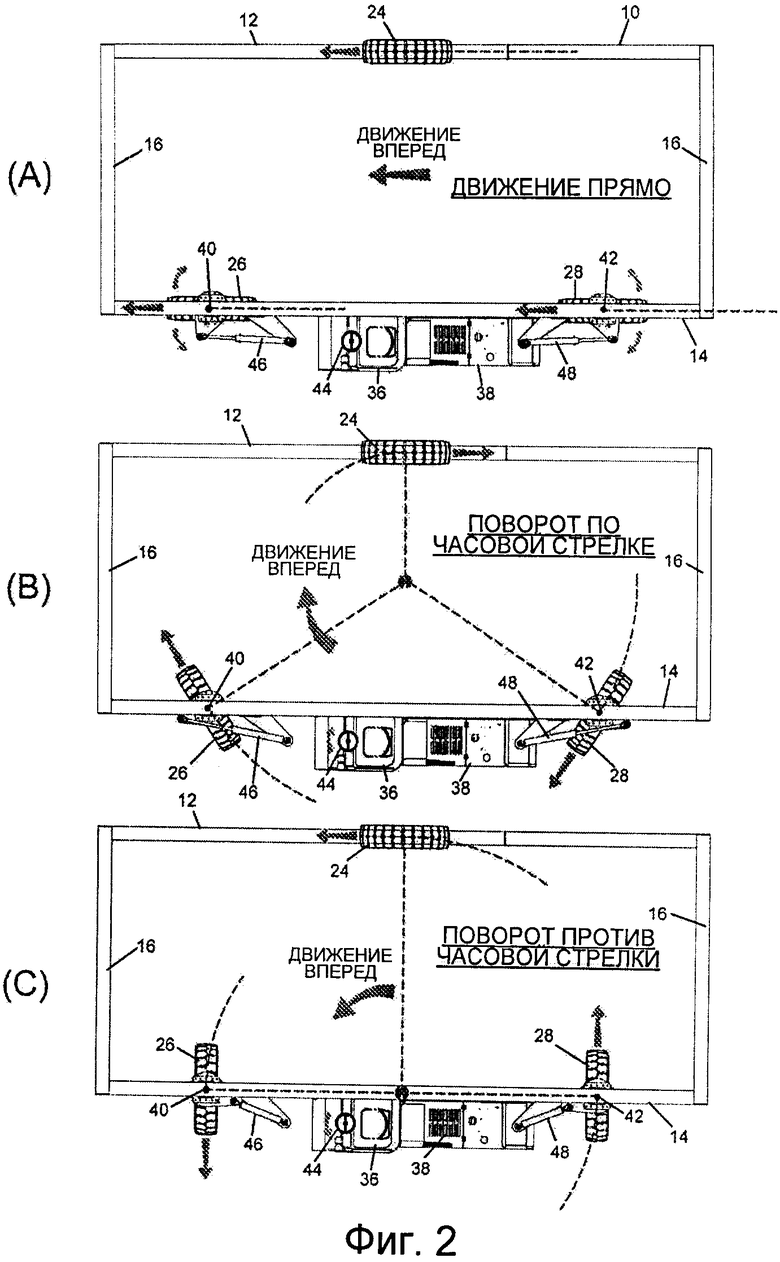
1. Портальный погрузчик, содержащий раму, имеющую практически параллельные противоположные стороны и конфигурацию, позволяющую охватывать контейнер для того, чтобы поднимать и транспортировать его, удерживая между указанными противоположными сторонами, множество ходовых колес, позволяющих располагать раму над контейнером, а также средства для подъема контейнера внутри рамы, при этом ходовые колеса включают первое ходовое колесо, расположенное в первом положении по меньшей мере приблизительно по центру на одной стороне рамы, а также второе и третье ходовые колеса, расположенные соответственно во втором и третьем положениях, находящихся на противоположных краях второй стороны рамы или возле них, при этом направлением движения второго и третьего колес можно управлять путем их поворота вокруг соответствующих практически вертикальных осей, и при этом опора погрузчика на поверхность земли осуществляется за счет его полного контакта с ней в указанных первом, втором и третьем положениях.
2. Портальный погрузчик по п.1, отличающийся тем, что первое колесо является неповорачиваемым, а его ось вращения проходит по ширине рамы.
3. Портальный погрузчик по п.1, отличающийся тем, что поворот второго и третьего колес вокруг их вертикальных осей для управления погрузчиком выполняется синхронно практически на одинаковый угол в противоположных направлениях.
4. Портальный погрузчик по п.1, отличающийся тем, что внутренний зазор рамы имеет достаточную высоту для того, чтобы складировать контейнеры штабелем высотой по меньшей мере в два контейнера.
5. Портальный погрузчик по п.1, отличающийся тем, что по меньшей мере одно из ходовых колес (первое, второе или третье) содержит пару колес, расположенных на одной оси вплотную друг к другу в указанных соответственно первом, втором или третьем положениях.
6. Портальный погрузчик по п.1, управление которым осуществляется дистанционно.
| US 3655081 A, 11.04.1972 | |||
| Электрод для гальванизации и электрофореза | 1990 |
|
SU1752410A1 |
| US 3570695 A, 16.03.1971 | |||
| ПНЕВМОКОЛЕСНЫЙ КОЗЛОВЫЙ КРАН | 0 |
|
SU361972A1 |
| Козловой кран | 1980 |
|
SU874586A1 |

