Настоящее изобретение относится к устройству для загрузки морского контейнера с удлиненным тяжелым грузом или рядом тяжелых грузов через открытую переднюю стенку морского контейнера. В рамках объема настоящего изобретения рассматривается загрузка грузов весом как минимум 1000 кг или ряда грузов общим весом как минимум 1000 кг.
Как известно, морские контейнеры используются для транспортировки сыпучих материалов по водному пути, а также автомобильным и железнодорожным транспортом. Использование стандартных размеров для морских контейнеров повышает эффективность транспортировки. Для зацепления морских контейнеров за углы с помощью поворотных замков и их перемещения по причалу используют контейнерные лифты, также называемые портальными погрузчиками. Грузчики также заинтересованы в транспортировке тяжелых удлиненных грузов, таких как алюминиевые плиты, стальные пластины или мешки, заполненные сыпучим материалом, в морских контейнерах. Однако загрузка морских контейнеров с такими грузами и последующая разгрузка морских контейнеров в пункте назначения представляется проблемой с практической точки зрения, поэтому на практике такие грузы если и перевозят в морских контейнерах, то очень редко. В тех случаях, когда грузчики все же выбирают такой способ транспортировки, они сталкиваются с проблемой загрузки морских контейнеров тяжелым грузом. На практике это приводит к ситуациям, угрожающим безопасности. Целью настоящего изобретения является предоставление решения, позволяющего загрузить морской контейнер с удлиненным тяжелым грузом или рядом тяжелых грузов через открытую переднюю стенку морского контейнера. Для достижения этой цели настоящее изобретение предоставляет устройство, содержащее перевозочное средство, выполненное с возможностью перемещения в направлении движения, причем перевозочное средство содержит раму, как минимум часть которой имеет как минимум, по существу, поперечное сечение в виде перевернутой U, если смотреть в направлении движения, частично образованное как минимум двумя противоположными вертикальными опорными стойками рамы, причем устройство дополнительно содержит зацепляющий узел, снабженный зацепляющими элементами для зацепления верхней стороны груза или ряда грузов, движущиеся элементы для перемещения зацепляющего узла вверх и вниз между двумя вертикальными опорными стойками относительно рамы, причем зацепляющий узел содержит промежуточную раму, снабженную удлиненным подъемным рычагом, проходящим как минимум, по существу, горизонтально и имеющим свободный край, ориентированный в направлении движения, причем на нижней стороне подъемного рычага выполнено несколько зацепляющих элементов как минимум частично по длине подъемного рычага как минимум в одном ряду, проходящем в продольном направлении подъемного рычага. Использование горизонтального подъемного рычага с зацепляющими элементами, расположенными на его нижней стороне, позволяет зацеплять тяжелые грузы, расположенные или не расположенные в ряд, посредством зацепляющих элементов, а затем вставлять рычаг вместе с грузом или рядом грузов, подвешенным к зацепляющим элементам, свободным краем в открытую переднюю стенку морского контейнера, чтобы таким образом безопасно загрузить морской контейнер.
В качестве отступления отметим, что в патенте США №3433459 описано мобильное подъемное устройство для управления реактивными двигателями. Такое подъемное устройство не подходит для загрузки морского контейнера с удлиненным тяжелым грузом или рядом тяжелых грузов через открытую переднюю стенку морского контейнера.
В конструктивно предпочтительном варианте осуществления изобретения зацепляющий узел дополнительно содержит удлиненный основной рычаг, проходящий как минимум, по существу, горизонтально над подъемным рычагом, причем основной рычаг и подъемный рычаг соединены между собой.
Если подъемный рычаг и основной рычаг соединены в продольном положении подъемного рычага так, что зацепляющие элементы расположены между рассматриваемым продольным положением и свободным краем подъемного рычага, как минимум длина подъемного рычага, над которой располагают зацепляющие элементы, может оставаться свободной для вставки в контейнер.
В целом, если смотреть в горизонтальном направлении перпендикулярно направлению движения, когда основной рычаг, подъемный рычаг и соединительная часть между основным рычагом и подъемным рычагом как минимум, по существу, принимают С-образную форму, это дает конструктивное преимущество. Верхняя горизонтальная часть С-образной формы в этом случае определяется основным рычагом, нижняя горизонтальная часть С-образной формы определяется подъемным рычагом, а вертикальная часть С-образной формы определяется соединительной частью.
Чтобы компенсировать, возможно, слегка наклонное положение удлиненного тяжелого груза или ряда тяжелых грузов, подлежащих загрузке, относительно морского контейнера желательно, чтобы подъемный рычаг был выполнен с возможностью поворота относительно рамы вокруг горизонтальной оси вращения, проходящей перпендикулярно направлению движения. В этом случае с конструктивной точки зрения также желательно использовать основной рычаг согласно ранее описанному возможному варианту осуществления изобретения, если основной рычаг и подъемный рычаг соединены между собой с возможностью поворота вокруг оси вращения, и в этом случае желательно, чтобы подъемный рычаг выходил за ось вращения, если смотреть со свободного, края подъемного рычага, а зацепляющий узел содержал исполнительный механизм, действующий между частью подъемного рычага, выходящей за ось вращения, и основным рычагом для поворота подъемного рычага вокруг оси вращения относительно основного рычага. Поворот подъемного рычага вокруг оси вращения может быть реализован простым способом путем соответствующего управления исполнительным механизмом.
Равномерное зацепление зацепляющих элементов, обеспечивающее равномерную загрузку зацепляющих элементов, может быть получено, в частности, если зацепляющие элементы имеют регулярную структуру.
Кроме того, в целях упрощения конструкции, желательно, чтобы зацепляющие элементы были расположены в одном ряду.
Во избежание риска нежелательной деформации в устройстве, вызванной нагрузкой, оказываемой грузом или рядом грузов, предпочтительно, чтобы две вертикальные опорные стойки были снабжены направляющими элементами, а промежуточная рама была снабжена направляющими деталями, причем направляющие элементы и направляющие детали должны быть выполнены с возможностью контроля взаимодействия во время движения зацепляющего узла вверх и вниз. Таким образом обеспечивается устойчивое движение вверх и вниз (загруженного) подъемного рычага.
В соответствии с наиболее предпочтительным вариантом осуществления зацепляющие элементы содержат всасывающие элементы, выполненные с возможностью взаимодействия с тяжелым грузом или рядом тяжелых грузов с помощью вакуума.
Чтобы в некоторой степени ориентироваться на тяжелый груз или ряд тяжелых грузов, в частности на их зацепление, всасывающие элементы предпочтительно подвешивают к гибким удлиненным тяговым элементам, которые, в свою очередь, подвешены к подъемному рычагу. Гибкие тяговые элементы могут быть выполнены в виде, например, шарнирных цепей.
Устойчивая подвеска всасывающих элементов может быть получена, если каждый всасывающий элемент подвешен к тяговым элементам на противоположных сторонах подъемного рычага.
Устойчивость подвески может быть повышена за счет того, что как минимум некоторые из тяговых элементов, через которые подвешен всасывающий элемент, проходят под углом друг к другу. Таким образом, можно подавить стремление к колебанию всасывающих элементов.
Для реализации равномерной нагрузки на всасывающие элементы желательно, чтобы всасывающие элементы были соединены с подъемным рычагом посредством пружинных элементов. На практике может оказаться, что не все всасывающие элементы загружены в одинаковой степени, например, в результате провисания груза или подъемного рычага или просто потому, что груз не является полностью прямым. Использование пружинных элементов позволяет частично уменьшить нагрузку на присоску, которая относительно сильно загружена, и обеспечить однородную нагрузку на различные всасывающие элементы.
В конструктивно выгодном варианте осуществления тяговые элементы подвешены к элементам кронштейна, соединенным с подъемным рычагом посредством пружинных элементов. Элементы кронштейна могут, например, проходить в поперечном направлении относительно подъемного рычага.
Изобретение не ограничивается устройствами, зацепляющими элементами которых являются всасывающие элементы. В зависимости от особенностей загружаемого груза или ряда загружаемых грузов желательно, например, чтобы зацепляющие элементы содержали крючковые или закрепляющие элементы, или чтобы зацепляющие элементы содержали магниты. В частности, при использовании магнитов возможно использование вышеописанных предпочтительных вариантов осуществления, в которых всасывающие элементы также используют посредством магнитов.
Изобретение дополнительно относится к способу загрузки морского контейнера с удлиненным тяжелым грузом или рядом тяжелых грузов через открытую переднюю стенку морского контейнера с помощью устройства в соответствии с настоящим изобретением, причем этот способ содержит следующие этапы:
А расположение удлиненного тяжелого груза или ряда тяжелых грузов и зацепляющих элементов относительно друг друга так, чтобы как минимум некоторые из зацепляющих элементов были расположены непосредственно над тяжелым грузом или рядом тяжелых грузов;
В зацепление зацепляющих элементов с удлиненным тяжелым грузом или рядом тяжелых грузов;
Г подъем зацепляющих элементов устройством, включая удлиненный тяжелый груз, зацепляемый зацепляющими элементами, или ряд тяжелых грузов, зацепляемых зацепляющими элементами так, чтобы подъемный рычаг, зацепляющие элементы и удлиненный тяжелый груз, зацепляемый зацепляющими элементами или ряд тяжелых грузов, зацепляемых зацепляющими элементами, проходили в пределах высоты морского контейнера;
Д перемещение перевозочного средства в первом направлении движения в продольном направлении морского контейнера со свободным краем подъемного рычага, направленным к отверстию в морском контейнере, так, чтобы подъемный рычаг, зацепляющие элементы, а также удлиненный тяжелый груз, зацепляемый зацепляющими элементами, или ряд тяжелых грузов, зацепляемых зацепляющими элементами, перемещались через отверстие в морском контейнере как минимум до тех пор, пока удлиненный тяжелый груз, зацепляемый зацепляющими элементами, или ряд тяжелых грузов, зацепляемых зацепляющими элементами, полностью не окажутся внутри морского контейнера;
Е снижение зацепляющих элементов устройством, включая удлиненный тяжелый груз, зацепляемый зацепляющими элементами, или ряд тяжелых грузов, зацепляемых зацепляющими элементами до тех пор, пока удлиненный тяжелый груз, зацепляемый зацепляющими элементами или ряд тяжелых грузов, зацепляемых зацепляющими элементами, не будут опущены на опорную поверхность морского контейнера;
Ж высвобождение зацепления зацепляющих элементов с тяжелым грузом или рядом тяжелых грузов;
З перемещение перевозочного средства во втором направлении движения противоположно первому направлению движения в продольном направлении морского контейнера как минимум до тех пор, пока подъемный рычаг полностью не выйдет за пределы морского контейнера.
В эффективном варианте осуществления способ включает в себя этап, который должен быть осуществлен между стадиями А и В:
Б снижение зацепляющих элементов устройством с целью приближения тяжелого груза или ряда тяжелых грузов к зацепляющим элементам.
Преимущество аналогичного типа может быть достигнуто, если зацепляющий узел перемещается вниз посредством движущихся элементов на этапе Б до тех пор, пока зацепляющие детали не войдут в зацепление с удлиненным тяжелым грузом или рядом тяжелых грузов и/или пока зацепляющий узел не будет перемещен вверх, включая удлиненный тяжелый груз, зацепляемый зацепляющими элементами, или ряд тяжелых грузов, зацепляемых зацепляющими элементами, посредством движущихся элементов на этапе Г и/или пока зацепляющий узел не будет перемещен вниз, включая удлиненный тяжелый груз, зацепляемый зацепляющими элементами, или ряд тяжелых грузов, зацепляемых зацепляющими элементами, посредством движущихся элементов на этапе Е.
На этапе А перевозочное средство предпочтительно перемещают так, чтобы тяжелый груз или ряд тяжелых грузов были расположены между двумя вертикальными опорными стойками или как минимум их продолжением. Таким образом достигается стабильное положение при подъеме тяжелого груза или ряда тяжелых грузов.
Также желательно, чтобы зацепляющие элементы входили в зацепление с удлиненным тяжелым грузом или рядом тяжелых грузов на его/их верхней стороне на этапе В. Таким образом, нет необходимости занимать место рядом с тяжелым грузом или рядом тяжелых грузов элементами, необходимыми для зацепления тяжелого груза или ряда тяжелых грузов. В этом контексте важно понимать, что пространство в морском контейнере ограничено и что некоторые грузы необходимо располагать с очень небольшим зазором в морском контейнере при загрузке морского контейнера.
Устойчивость устройства при фактической загрузке морского контейнера на этапе Е увеличивается за счет перемещения перевозочного средства так, чтобы морской контейнер будет расположен между двумя вертикальными опорными стойками.
Аналогичное преимущество достигается при использовании устройства, зацепляющее устройство которого содержит удлиненный основной рычаг, проходящий как минимум, по существу, горизонтально и выше подъемного рычага, при этом основной рычаг и подъемный рычаг соединены между собой и основной рычаг проходит над морским контейнером на этапе Е.
Способ согласно настоящему изобретению удобнее всего применять, когда груз представляет собой алюминиевую плиту, причем предпочтительно использовать устройство, в котором зацепляющие элементы являются всасывающими элементами, а плита зацеплена с помощью всасывающих элементов на этапе В.
Способ согласно настоящему изобретению также можно применять, когда ряд грузов представляет собой ряд мешков, каждый из которых имеет объем, равный как минимум одному кубическому метру, причем эти мешки заполнены сыпучим материалом. Кроме того, предпочтительно используют устройство, зацепляющие элементы которого содержат крючковые или закрепляющие элементы, причем мешки входят в зацепление с помощью крючковых или закрепляющих элементов на этапе В.
Способ согласно настоящему изобретению также можно применять, когда груз представляет собой стальную пластину, причем предпочтительно использовать устройство, зацепляющие элементы которого содержат магниты, а стальная пластина зацеплена с помощью магнитов на этапе В.
В целом, можно утверждать, что изобретение может быть соответствующим образом использовано, в частности, если груз или ряд грузов имеет массу как минимум 1000 кг (в предпочтительном варианте как минимум 5000 кг).
Изобретение также относится к способу разгрузки морского контейнера, загруженного удлиненным тяжелым грузом или рядом тяжелых грузов, через открытую переднюю стенку с помощью устройства в соответствии с настоящим изобретением, причем этот способ содержит следующие этапы:
Л перемещение перевозочного средства в первом направлении движения в продольном направлении морского контейнера со свободным краем подъемного рычага, направленным к отверстию в морском контейнере, так, чтобы подъемный рычаг и зацепляющие элементы перемещались в морской контейнер через отверстие в морском контейнере, как минимум до тех пор, пока зацепляющие элементы не окажутся непосредственно над тяжелым грузом или рядом тяжелых грузов;
М зацепление зацепляющих элементов с тяжелым грузом или рядом тяжелых грузов;
Н подъем устройством тяжелого груза, зацепляемого зацепляющими элементами, или ряда тяжелых грузов, зацепляемых зацепляющими элементам, в морском контейнере;
О перемещение перевозочного средства во втором направлении
движения противоположно первому направлению движения в продольном направлении морского контейнера как минимум до тех пор, пока подъемный рычаг полностью не выйдет за пределы морского контейнера;
П высвобождение зацепления зацепляющих элементов с тяжелым грузом или рядом тяжелых грузов.
Далее изобретение будет раскрыто более подробно посредством описания возможного варианта осуществления, которое не должно истолковываться как ограничивающее, со ссылкой на следующие чертежи:
Фигура 1 представляет собой вид в аксонометрии устройства в соответствии с настоящим изобретением;
Фигура 2 представляет собой вид спереди устройства, показанного на фигуре 1;
Фигура 3 представляет собой вид сбоку устройства, показанного на фигуре 1;
Фигура 4 представляет собой вид снизу подъемного рычага, показанного на фигуре 1;
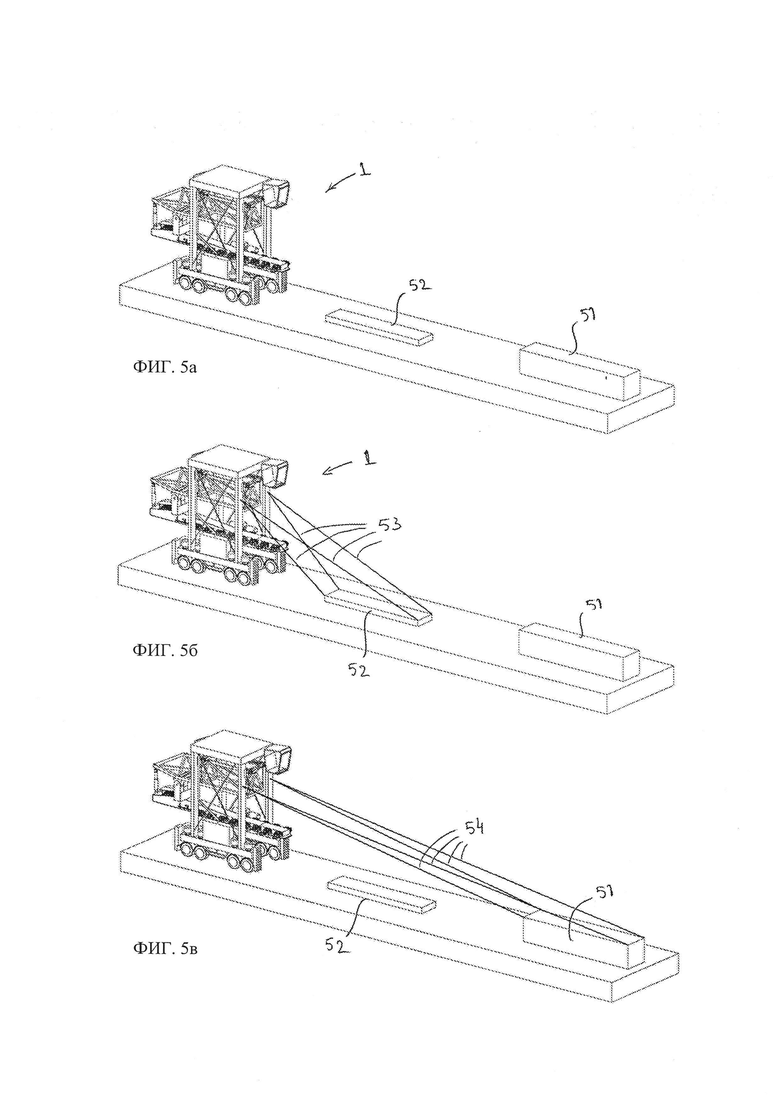
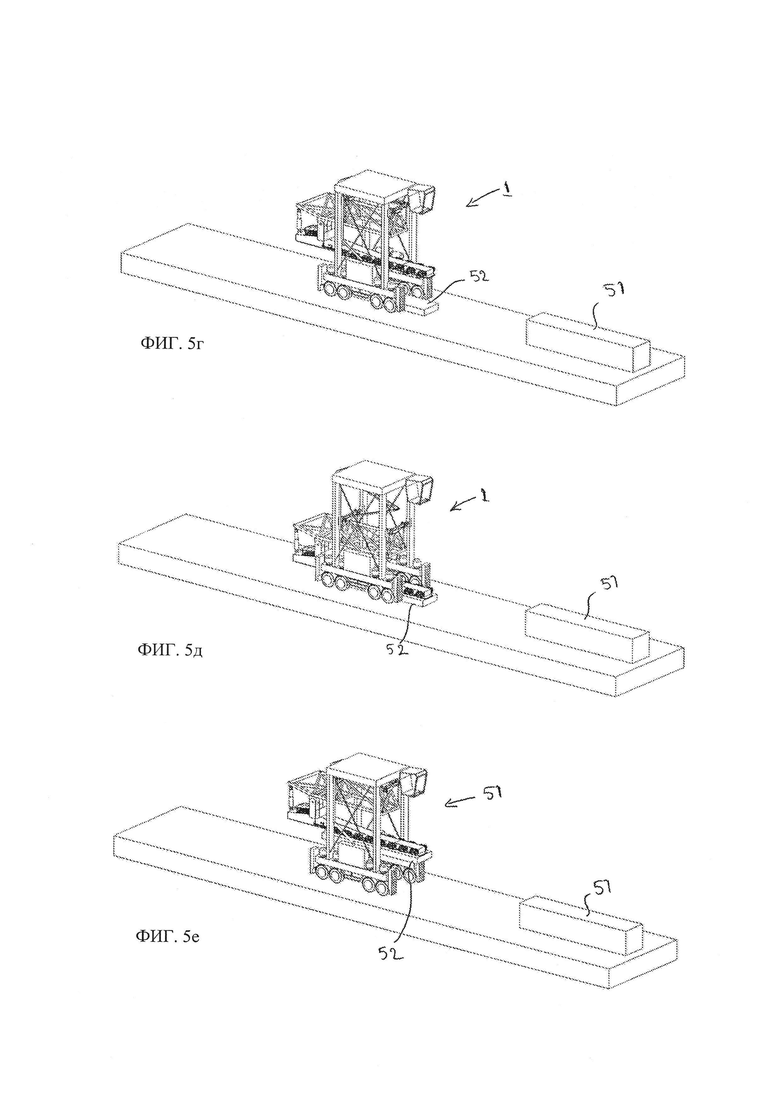
Фигуры 5а-5е и фигура 6 представляют собой виды в аксонометрии семи успешных этапов использования устройства/показанного на фигуре 1, во время загрузки контейнера с удлиненным тяжелым грузом;
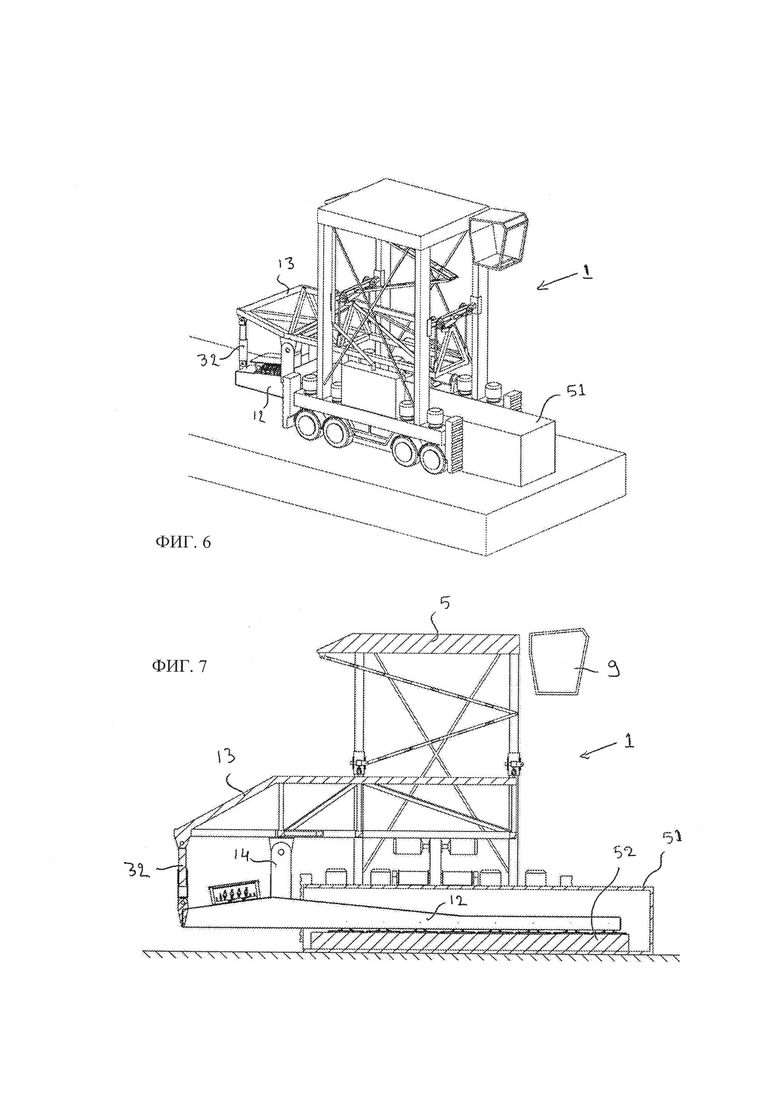
Фигура 7 представляет собой вертикальный вид в поперечном разрезе фигуры 6;
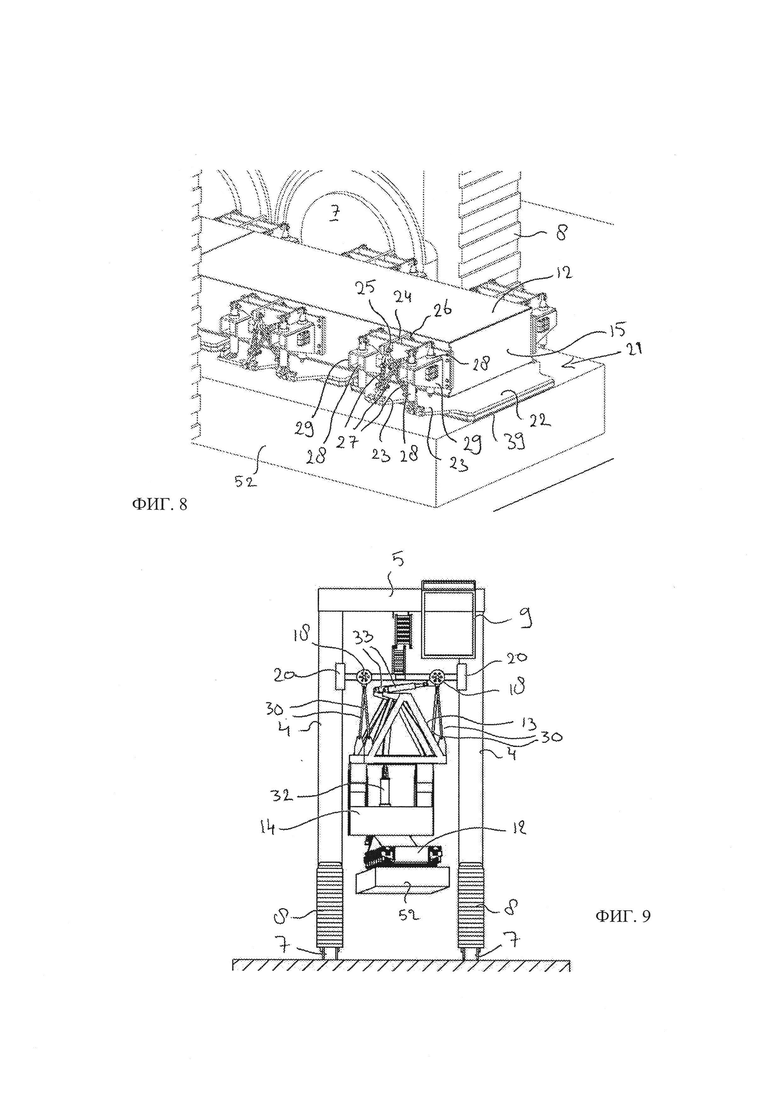
Фигура 8 представляет собой вид в аксонометрии свободного края подъемного рычага устройства в соответствии с настоящим изобретением;
Фигура 9 представляет собой вид спереди устройства в соответствии с настоящим изобретением, которое входит в зацепление с тяжелым грузом;
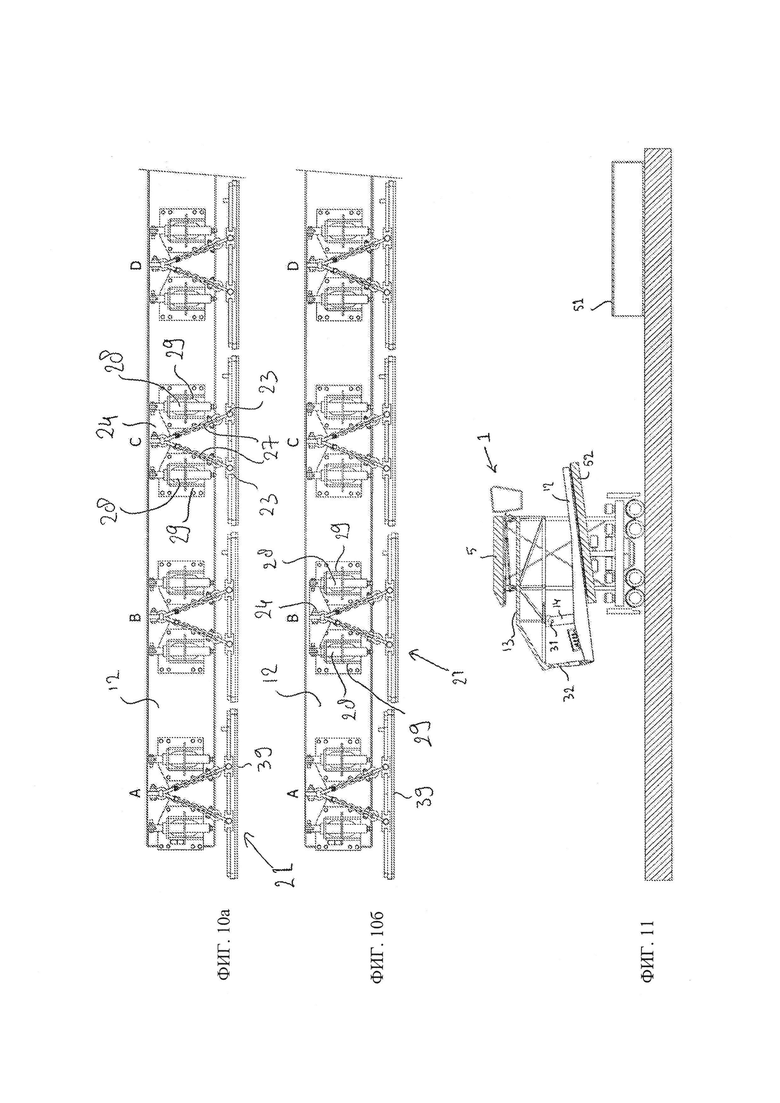
Фигуры 10а и 10б представляют собой виды сбоку двух состояний подъемного рычага, включая четыре связанные присоски;
Фигура 11 представляет собой вертикальный вид в продольном разрезе положения, сравнимого с положением, показанным на фигуре 5е, но в этом случае с поворотным подъемным рычагом.
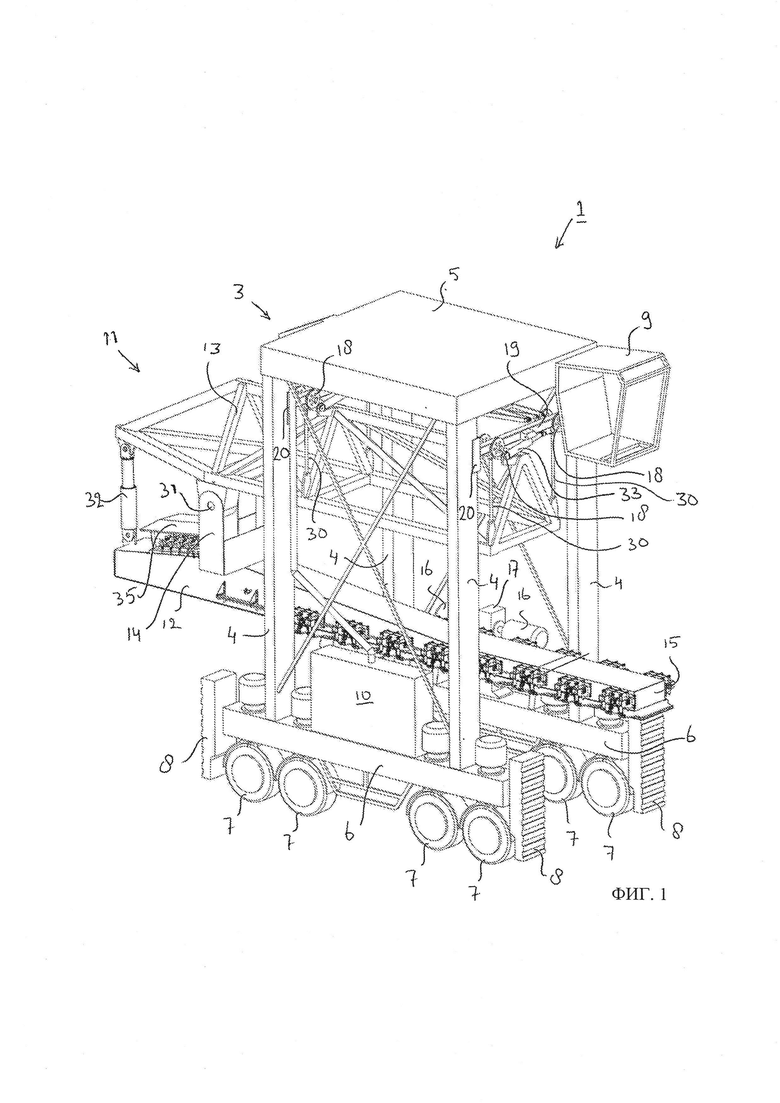
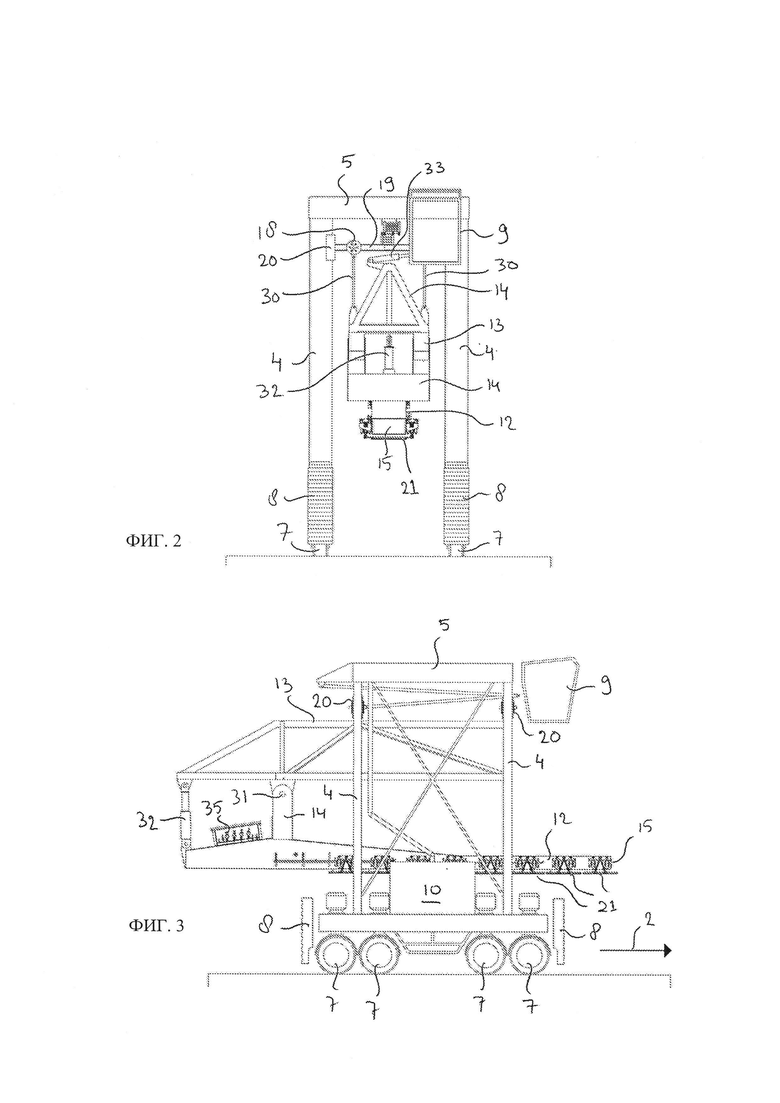
Фигуры 1, 2 и 3 представляют собой различные виды, показывающие устройство 1 в соответствии с настоящим изобретением. Устройство 1 можно рассматривать как перевозочное средство, выполненное с возможностью перемещения в направлении движения 2 (фигура 3) или в противоположном ему направлении. Перевозочное средство 1 можно считать производным от типа транспортного средства, известного как «портальный погрузчик». Эти перевозочные средства известны сами по себе и используются для перемещения морских контейнеров, например на причалах портовой территории.
Перевозочное средство 1 имеет раму 3 с четырьмя опорными стойками 4, соединенными между собой за верхние концы через конструкцию 5 крышки. В виде спереди на фигуре 2 опорные стойки 4 и конструкция 5 крышки образуют форму в виде перевернутой U. Стойки 4 поддерживаются на двух балках 6, проходящих параллельно направлению движения 2. На нижней стороне каждой балки 6 выполнены четыре колеса 7, как минимум некоторые из которых являются управляемыми и как минимум некоторые из которых являются рулевыми. Направление движения 2 представляет собой прямое направление, в котором движется перевозочное средство 1, когда (рулевые) колеса находятся в нейтральном положении. На концах балок 6 выполнены бамперные элементы 8. На передней стороне рамы 3 перевозочное средство 1 содержит кабину 9, соединенную с рамой 3, из которой можно осуществлять рулевое и общее управление перевозочным средством 1. Рулевое и общее управление перевозочным средством 1 также можно осуществлять с помощью пульта дистанционного управления, например, с земли, полуавтоматически или полностью автоматически. На одной из балок 6 выполнен дизельный генератор 10, предназначенный для управления перевозочным средством 1 и его различными компонентами.
Перевозочное средство 1 дополнительно содержит зацепляющий узел 11, выполненный между опорными стойками описанной выше U-образной рамы 3. Зацепляющий узел 11 содержит промежуточную раму с подъемным рычагом, основным рычагом и соединительной частью 14 между подъемным рычагом 12 и основным рычагом 13. Подъемный рычаг 12 представляет собой удлиненную составную балку со свободным краем 15, ориентированным в направлении движения 2. Основной рычаг 13 представляет собой каркасную конструкцию, подвешенную на подъемном устройстве. Основной рычаг 13 показан на чертежах не полностью в том аспекте, что он также проходит по передней стороне рамы 3, в частности, под кабиной 9, и на части, которая не показана на чертежах, есть балансировочный груз.
Вышеупомянутая соединительная часть 14 зацепляющего узла 11 содержит горизонтальную ось 31 вращения между подъемным рычагом 12 и основным рычагом 13, выполненную с возможностью поворота в направлении, перпендикулярном направлению движения 2. На конце подъемного рычага 12 напротив свободного края 15 выполнен гидравлический цилиндр 32, действующий между подъемным рычагом 12 и основным рычагом 13. Подъемный рычаг 12 выполнен с возможностью поворота вверх или вниз вокруг оси 31 вращения посредством соответствующего приведения в действие гидравлического цилиндра 32 и перехода в положение, показанное на фигуре 11, в котором подъемный рычаг 12 находится под острым углом к горизонтальной линии. Вышеописанное вращение подъемного рычага 12 относительно основного рычага 13 необходимо, например, для компенсации отклонения подъемного рычага 32.
Вышеописанное подъемное устройство для зацепляющего узла 11 содержит два кабельных барабана 16 на вертикальном приводном узле 17 для кабельных барабанов. Из кабельных барабанов 16 кабели (не показаны) проходят прямо до конструкции 5 крышки, где принимают различные положения, которые вместе образуют прямоугольник непосредственно над основным рычагом 13. Из указанных положений кабели проходят прямо вниз, проходят через 180 градусов по шкивам 18 и затем снова вступают в зацепление с конструкцией 5 крышки. Шкивы 18 соединены с возможностью вращения с двумя поперечными балками 19, каждая из которых проходит между двумя опорными стойками 4. На концах поперечных балок 19 расположены два направляющих элемента 20, которые направляют элементы, выполненные с возможностью контроля взаимодействия с направляющими элементами (не показаны) на опорных стойках 4. Основной рычаг 13 подвешен к двум поперечным балкам 19 с помощью четырех цепей 30, которые также могут быть выполнены в виде стяжек. Каждая из стяжек 30 соединена с возможностью поворота с одной из двух поперечных балок 19 на верхнем конце и с основным рычагом 13 на нижнем конце. Из вышеприведенного описания понятно, что приведение в действие кабельных барабанов 16 приводит к перемещению зацепляющего узла 11 вверх или вниз. Подъемное устройство дополнительно содержит два цилиндра 33, каждый из которых действует поперечно направлению движения 2 между одной из поперечных балок 19 и основным рычагом 13. Приведение в действие двух кабельных барабанов 16, двух цилиндров 33 и цилиндра 32 позволяет ориентировать основной рычаг 13 и зацепляющий узел 11 в целом наклонно в различных направлениях относительно рамы 3, например, как показано на фигуре 9.
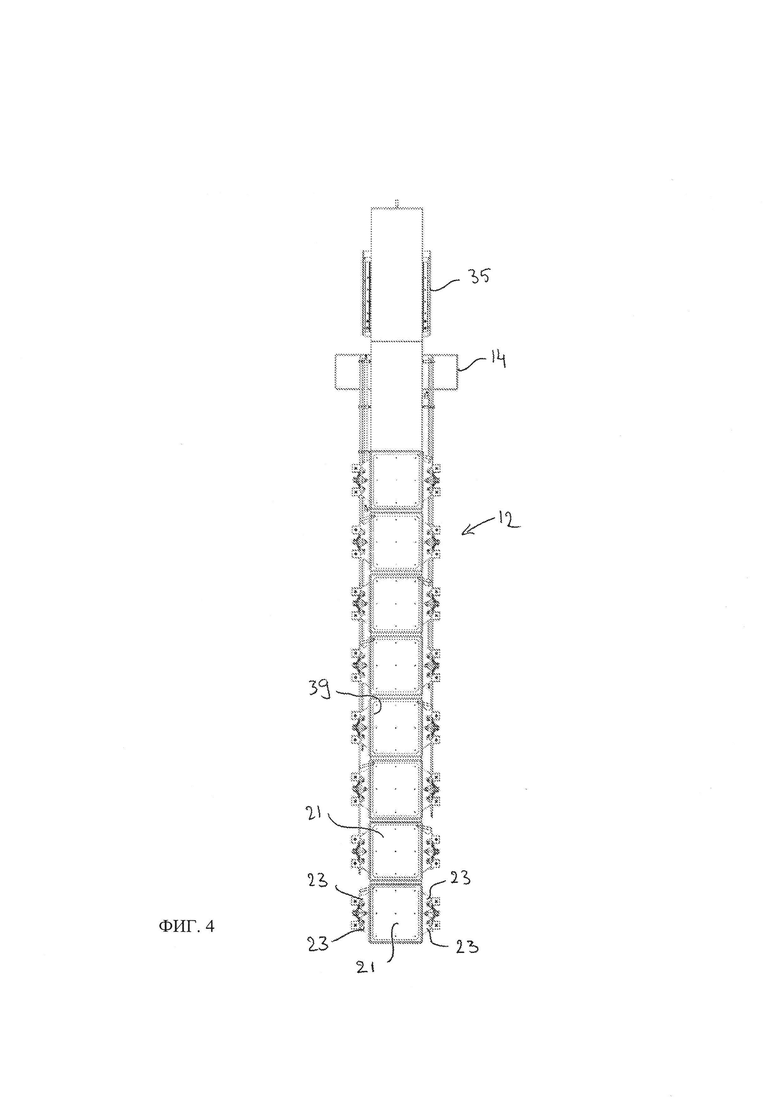
Зацепляющий узел 11 дополнительно содержит восемь присосок 21, выполненных в одном ряду под подъемным рычагом 12. Присоски 21 расположены близко друг к другу. Ряд начинается на свободном крае 15 и оттуда проходит в направлении, противоположном направлению движения. Общая длина ряда составляет около 10,5 м, что соответствует максимальной длине тяжелого груза или ряда тяжелых грузов, которые могут быть загружены в морской контейнер с помощью устройства. В этом конкретном примере длина отдельных присосок прямоугольной формы составляет около 1,25 м, а ширина составляет около 1,10 м. Присоски расположены на расстоянии около 30 мм друг от друга (фигура 4). В рамках настоящего изобретения возможно использование присосок различных форм и/или размеров и/или использование, например, двух параллельных рядов присосок.
Как отчетливо видно на фигуре 8, каждая из присосок 21 подвешена к подъемному рычагу 12 так, что соединение между присоской 21 с одной стороны и подъемным рычагом 12 с другой стороны можно охарактеризовать как слегка гибкое. Каждая из присосок 21 содержит стальную пластину 21 на верхней стороне присоски 21. На нижней стороне каждой стальной пластины расположена гибкая кромка 39 из резины или как минимум из резинового материала, которая определяет вышеупомянутые размеры присосок 21. Стальная пластина 22 шире, чем подъемный рычаг 12, и имеет две выступающие части 23 с каждой стороны подъемного рычага 12. Присоски 21 подвешены на кронштейнах 24 посредством цепей 27. Для этого каждый из кронштейнов 24 снабжен двумя точками 25, 26 крепления. Цепи 27 проходят от концов каждой из выступающих частей 23 до каждой из точек 25, 26 зацепления. Таким образом, по обе стороны подъемного рычага выполнены четыре цепи 12 для каждой присоски 21. Таким образом, каждая присоска 21 подвешена к восьми цепям 27. Такой способ подвески присосок обеспечивает только ограниченное горизонтальное перемещение присосок 21 по отношению к подъемному рычагу 12.
Каждый из кронштейнов 24 опирается на верхние концы четырех поршневых частей четырех пружинных элементов 28. Части цилиндров пружинных элементов 28 жестко соединены с монтажными рычагами 29, проходящими сбоку от подъемного рычага 12 и устойчиво соединенными с ними. На каждом монтажном кронштейне 29 предусмотрены два пружинных элемента. Таким образом, четыре монтажных рычага 29 и восемь пружинных элементов 28 предусмотрены для каждой присоски 21. Работа описанной выше подвески присосок 21 будет описана далее со ссылкой на фигуры 10а и 10б.
Клапан 35 выполнен на подъемном рычаге 12 между соединительной частью 14 и гидравлическим цилиндром 32. От клапана 35 линии вакуума проходят к присоскам 21, а именно к точкам соединения, выполненным на верхней стороне стальных пластин 22 присосок 21, либо через внутреннюю часть подъемного рычага 12, либо вдоль внешней стороны подъемного рычага 12. Через клапанный блок 35 присоски 21 соединены с источником вакуума (не показан). Вакуумная система, содержащая клапанный блок 35, выполнена таким образом, чтобы отказ одного компонента вакуумной системы не мог привести к потере вакуума во всех присосках 21.
Ниже описан способ использования описанного выше устройства 1 для загрузки морского контейнера 51, а именно в этом примере морского контейнера длиной 40 футов (12, 19 м) с относительно тяжелым удлиненным грузом 52 в соответствии со способом согласно настоящему изобретению. Морской контейнер 51 открыт с передней стороны, обращенной к перевозочному средству 1, и оснащен отверстием 50 на этой стороне. Груз 52 представляет собой, например, так называемую алюминиевую плиту. Эти грузы 52 могут иметь вес от 7500 кг до 30 000 кг, длину от 4,2 до 11 м, ширину от 1,15 до 2,20 м и толщину обычно около 60 см.
На предварительной стадии плита 52 расположена как минимум, по существу, вровень с морским контейнером 51. Перевозочное средство 1 располагают на одной линии с плитой 52 и морским контейнером 51 на стороне плиты 52, удаленной от морского контейнера 51 в направлении движения к морскому контейнеру 51 (фигура 5а). Затем относительные положения плиты 52 и морского контейнера 51 относительно перевозочного средства 1 определяются с помощью лазерных лучей 53 и 54 соответственно (фигура 5б, фигура 5в). Источники лазерных лучей не показаны на фигурах.
Затем перевозочное средство 1 перемещают так, чтобы присоски 21 располагались непосредственно над плитой 52 (фигура 5г). В дополнение к информации, которая была получена с помощью лазерных лучей 52, 54, во время этой операции можно также использовать камеры, присутствующие в кабине 9. Плиту 52 располагают между опорными стойками 4 (или как минимум их продолжением) перевозочного устройства 1.
На следующем этапе зацепляющий узел 11 опускают с помощью подъемного устройства до тех пор, пока присоски 52, а именно гибкие периферийные кромки 39, не будут опущены на плиту 52. В результате цепи 27 являются провисающими (5д). Затем активируется вакуумная система, в результате чего присоски 21 вступают в зацепление с верхней стороной плиты 52 за счет всасывания. В этом примере грузоподъемность каждой присоски 21 составляет как минимум около 5000 кг. Затем подъемное устройство поднимает зацепляющий узел 11 снова, причем плита 52 перемещается от земли, на которой она была установлена. Во время подъема цепи 21 снова натягиваются (фиг. 5е).
Если из измерений, проведенных с помощью лазерных лучей 53, 54, видно, что продольное направление плиты 52 включает в себя (острый) угол с продольным направлением морского контейнера 51, перевозочное средство 1 может перемещаться способом (рулевым управлением) из положения, показанного на фигуре 5в, что направление движения 2 будет продолжаться параллельно продольному направлению плиты 52. В качестве альтернативы также можно переместить перевозочное средство 1 в положение над плитой 52 так, чтобы направление движения 2 проходило параллельно морскому контейнеру 51 (и, если возможно, вровень с ним). Затем зацепляющий узел 11 может быть расположен наклонно относительно рамы 3, но прямо над плитой 52 посредством соответствующего приведения в действие цилиндров 33 так, чтобы подъемный рычаг 12 проходил параллельно плите 52. Захватив и подняв плиту 52, зацепляющий узел 11 может снова переместиться в нейтральное положение посредством соответствующего приведения в действие цилиндров, причем в нейтральном положении подъемный рычаг 12 проходит параллельно направлению движения 2.
Во время подъема существует риск того, что не все присоски 21 будут загружены в одинаковой степени. Это, в свою очередь, связано с риском того, что нагрузка на конкретную присоску 21 будет превышать нагрузку на рассматриваемую присоску 21. Этот риск может, например, возникать из-за невыровненной (верхней стороны) плиты 52, отклонения плиты 52 или отклонения подъемного рычага 12. Этот риск снижается способом подвески присоски 21 с использованием пружинных элементов 28, как описано выше. Обратимся к фигурам 10а и 10б. На фигуре 10а показано идеальное положение, когда все присоски 21, находящиеся в положениях А-Г, равномерно нагружаются тяжелым грузом (не показан). Нагрузка настолько низка, что никакого (существенного) сжатия пружинных элементов 28 не происходит. Однако в примере, показанном на фигуре 10б, присоска 20, расположенная в положении Б, больше загружена. В результате пружинные элементы 28, связанные с рассматриваемой присоской 21, будут сжиматься, в результате чего нагрузка на конкретную присоску 21 уменьшится. Характеристики пружинных элементов 28 предназначены для обеспечения максимальной нагрузки на все присоски 21. В этом примере максимальное сжатие пружинных элементов составляет 30 мм.
После этого перевозочное средство 1 перемещается к морскому контейнеру 51. Когда свободный край 15 подъемного рычага 12 расположена близко к отверстию 50, подъемное устройство перевозочного средства 1 располагает зацепляющий узел 11 на высоте так, чтобы верхняя сторона подъемного рычага 12 была расположена ниже уровня внутренней стороны крышки морского контейнера 51, а нижняя сторона плиты 52 была расположена выше уровня верхней стороны дна морского контейнера 51. Перевозочное средство 1 расположено так, чтобы направление движения 2 перевозочного средства 1 и продольные направления подъемного рычага 12 (и, следовательно, плиты 52) проходили параллельно продольному направлению морского контейнера 51. Кроме того, ширина подъемного рычага 12, плиты 52 и присосок 21 проходит в пределах ширины отверстия в морском контейнере 51. Если перевозочное средство 1 неправильно выровнено относительно морского контейнера 51, что может быть определено, например, с помощью лазерных датчиков или камер, и что само по себе означает, что свободные край 15 подъемного рычага 12 не расположен непосредственно перед открытым контейнером 51, то можно переместить зацепляющий узел 11 вбок относительно рамы 3 посредством (одновременного) приведения в действие цилиндров 33.
После этого перевозочное средство 1 перемещается в направлении движения 2 с помощью подъемного рычага 12, присосок 21, а также плиты 52, зацепляемой присосками 21, которые перемещаются в морской контейнер 51 через отверстие 50 в морском контейнере 51 как минимум до тех пор, пока плита 52 не окажется полностью в морском контейнере. Морской контейнер 51 распололагают между опорными стойками 4. Затем подъемное устройство опускает зацепляющий узел 11 до тех пор, пока плита 52 не окажется на дне морского контейнера 51, при этом цепи 72 снова слегка ослабнут, а пружинные элементы 28 снова примут разгруженное положение. Таким образом достигается положение, показанное на фигурах 6-7. На заключительном этапе вакуумная система дезактивируется, зацепляющий узел 11 поднимается в ограниченной степени, а перевозочное средство 1 перемещается в направлении, противоположном направлению движения 2 до тех пор, пока подъемный рычаг 12 не будет полностью выведен из морского контейнера.
Аналогичным образом можно укладывать удлиненные тяжелые грузы в морской контейнер 51, если это позволяют толщина/высота, а также вес (в связи с максимально допустимой грузоподъемностью морского контейнера 51). На основании вышеприведенного описания квалифицированному специалисту будет понятно, что морской контейнер может быть снова разгружен с использованием перевозочного средства 1 путем выполнения описанных этапов, по существу, в обратном порядке.
Как описано выше, изобретение раскрыто с помощью иллюстрации на основе алюминиевых плит, но возможна также загрузка различных видов тяжелых удлиненных грузов с помощью устройства в соответствии с изобретением. Например, рекомендуется рассмотреть возможность загрузки стальных плит или удлиненных пластин, входящих в зацепление с помощью присосок, как описано выше, или с помощью магнитов (вместо присосок). Кроме того, в этом отношении могут быть рассмотрены большие мешки, заполненные сыпучим материалом, причем большие мешки располагают в ряд и каждый из них может быть зацеплен с помощью крючка или зажима, выполненного на нижней стороне подъемного рычага.
Изобретение относится к устройству для загрузки морского контейнера с удлиненным тяжелым грузом или рядом тяжелых грузов через открытую переднюю стенку морского контейнера. Устройство содержит перевозочное средство, содержащее раму и зацепляющий узел, снабженный зацепляющими элементами, а также движущие элементы для перемещения зацепляющего узла вверх и вниз относительно рамы. Зацепляющий узел содержит промежуточную раму, оснащенную удлиненным подъемным рычагом, проходящим как минимум, по существу, горизонтально и имеющий свободный край, ориентированный в направлении движения, причем на нижней стороне подъемного рычага выполнено несколько зацепляющих элементов как минимум частично по длине подъемного рычага как минимум в одном ряду, проходящем в продольном направлении подъемного рычага. Достигается обеспечение равномерной загрузки и упрощение конструкции. 3 н. и 30 з.п. ф-лы, 17 ил.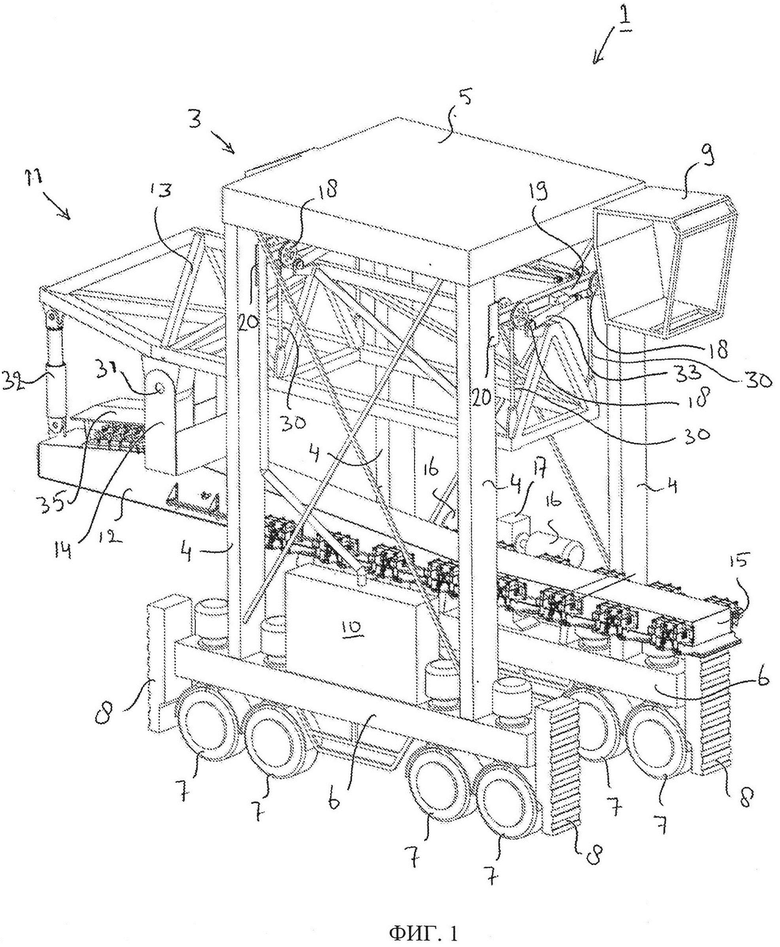
1. Устройство для загрузки морского контейнера с удлиненным тяжелым грузом или рядом тяжелых грузов через открытую переднюю стенку морского контейнера,
содержащее перевозочное средство, выполненное с возможностью перемещения в направлении движения, причем перевозочное средство содержит раму, как минимум часть которой имеет как минимум, по существу, поперечное сечение в виде перевернутой U, если смотреть в направлении движения, частично образованное как минимум двумя противоположными вертикальными опорными стойками рамы,
причем устройство дополнительно содержит зацепляющий узел, снабженный зацепляющими элементами для зацепления верхней стороны груза или ряда грузов, движущиеся элементы для перемещения зацепляющего узла вверх и вниз между двумя вертикальными опорными стойками относительно рамы,
причем зацепляющий узел содержит промежуточную раму, снабженную удлиненным подъемным рычагом, проходящим как минимум, по существу, горизонтально и имеющим свободный край, ориентированный в направлении движения, причем на нижней стороне подъемного рычага выполнено несколько зацепляющих элементов как минимум частично по длине подъемного рычага как минимум в одном ряду, проходящем в продольном направлении подъемного рычага,
причем зацепляющий узел дополнительно содержит удлиненный основной рычаг, проходящий как минимум, по существу, горизонтально над подъемным рычагом, отличающееся тем, что основной рычаг и подъемный рычаг соединены в продольном положении подъемного рычага так, чтобы зацепляющие элементы были расположены между рассматриваемым продольным положением и свободным краем подъемного рычага.
2. Устройство по п. 1, отличающееся тем, что если смотреть в горизонтальном направлении перпендикулярно направлению движения, основной рычаг, подъемный рычаг и соединительная часть между основным рычагом и подъемным рычагом как минимум, по существу, принимают С-образную форму.
3. Устройство по п. 1, отличающееся тем, что подъемный рычаг выполнен с возможностью поворота относительно рамы вокруг горизонтальной оси вращения, проходящей перпендикулярно направлению движения.
4. Устройство по п. 3, отличающееся тем, что основной рычаг и подъемный рычаг соединены между собой с возможностью поворота вокруг оси вращения.
5. Устройство по п. 4, отличающееся тем, что подъемный рычаг выходит за ось вращения, если смотреть со свободного края подъемного рычага, а зацепляющий узел содержит исполнительный механизм, действующий между частью подъемного рычага, выходящей за ось вращения, и основным рычагом для поворота подъемного рычага вокруг оси вращения относительно основного рычага.
6. Устройство по п. 1, отличающееся тем, что зацепляющие элементы имеют регулярную структуру.
7. Устройство по п. 1, отличающееся тем, что зацепляющие элементы располагают в одном ряду.
8. Устройство по п. 1, отличающееся тем, что две вертикальные опорные стойки снабжают направляющими элементами, а промежуточную раму снабжают направляющими деталями, причем направляющие элементы и направляющие детали выполняют с возможностью контроля взаимодействия во время движения зацепляющего узла вверх и вниз.
9. Устройство по п. 1, отличающееся тем, что зацепляющие элементы являются всасывающими элементами, выполненными с возможностью взаимодействия с тяжелым грузом или рядом тяжелых грузов с помощью вакуума.
10. Устройство по п. 9, отличающееся тем, что всасывающие элементы подвешивают к гибким удлиненным тяговым элементам, которые, в свою очередь, подвешивают к подъемному рычагу.
11. Устройство по п. 10, отличающееся тем, что каждый всасывающий элемент подвешивают к тяговым элементам на противоположных сторонах подъемного рычага.
12. Устройство по п. 10, отличающееся тем, что как минимум некоторые из тяговых элементов, через которые подвешен всасывающий элемент, проходят под углом друг к другу.
13. Устройство по п. 9, отличающееся тем, что всасывающие элементы соединяют с подъемным рычагом посредством пружинных элементов.
14. Устройство по п. 10, отличающееся тем, что всасывающие элементы соединяют с подъемным рычагом посредством пружинных элементов и тяговые элементы подвешивают к элементам кронштейна, соединенным с подъемным рычагом посредством пружинных элементов.
15. Устройство по п. 1, отличающееся тем, что зацепляющие элементы содержат крючковые или закрепляющие элементы.
16. Устройство по п. 1, отличающееся тем, что зацепляющие элементы содержат магниты.
17. Способ погрузки морского контейнера с удлиненным тяжелым грузом или рядом тяжелых грузов через открытую переднюю стенку морского контейнера с помощью устройства по любому из пп. 1-16, содержащий следующие этапы:
А - расположение удлиненного тяжелого груза или ряда тяжелых грузов и зацепляющих элементов относительно друг друга так, чтобы как минимум некоторые из зацепляющих элементов были расположены непосредственно над тяжелым грузом или рядом тяжелых грузов;
В - зацепление зацепляющих элементов с удлиненным тяжелым грузом или рядом тяжелых грузов;
Г - подъем зацепляющих элементов устройством, включая удлиненный тяжелый груз, зацепляемый зацепляющими элементами, или ряд тяжелых грузов, зацепляемых зацепляющими элементами так, чтобы подъемный рычаг, зацепляющие элементы и удлиненный тяжелый груз, зацепляемый зацепляющими элементами, или ряд тяжелых грузов, зацепляемых зацепляющими элементами, проходили в пределах высоты морского контейнера;
Д - перемещение перевозочного средства в первом направлении движения в продольном направлении морского контейнера со свободным краем подъемного рычага, направленным к отверстию в морском контейнере так, чтобы подъемный рычаг, зацепляющие элементы, а также удлиненный тяжелый груз, зацепляемый зацепляющими элементами, или ряд тяжелых грузов, зацепляемых зацепляющими элементами, перемещались через отверстие в морском контейнере как минимум до тех пор, пока удлиненный тяжелый груз, зацепляемый зацепляющими элементами, или ряд тяжелых грузов, зацепляемых зацепляющими элементами, полностью не окажутся внутри морского контейнера;
Е - снижение зацепляющих элементов устройством, включая удлиненный тяжелый груз, зацепляемый зацепляющими элементами, или ряд тяжелых грузов, зацепляемых зацепляющими элементами, пока удлиненный тяжелый груз, зацепляемый зацепляющими элементами, или ряд тяжелых грузов, зацепляемых зацепляющими элементами, не будут опущены на опорную поверхность морского контейнера;
Ж - высвобождение зацепления зацепляющих элементов с тяжелым грузом или рядом тяжелых грузов;
З - перемещение перевозочного средства во втором направлении движения противоположно первому направлению движения в продольном направлении морского контейнера как минимум до тех пор, пока подъемный рычаг полностью не выйдет за пределы морского контейнера.
18. Способ по п. 17, отличающийся тем, что между этапами А и В выполняют следующий этап:
Б - снижение зацепляющих элементов устройством с целью приближения тяжелого груза или ряда тяжелых грузов к зацепляющим элементам.
19. Способ по п. 18, отличающийся тем, что зацепляющий узел перемещают вниз посредством движущихся элементов в рамках этапа Б до тех пор, пока зацепляющие детали не войдут в зацепление с удлиненным тяжелым грузом или рядом тяжелых грузов.
20. Способ по п. 17, отличающийся тем, что зацепляющий узел, включая удлиненный тяжелый груз, зацепляемый зацепляющими элементами, или ряд тяжелых грузов, зацепляемых зацепляющими элементами, перемещают вверх посредством движущихся элементов на этапе Г.
21. Способ по п. 17, отличающийся тем, что зацепляющий узел, включая удлиненный тяжелый груз, зацепляемый зацепляющими элементами, или ряд тяжелых грузов, зацепляемых зацепляющими элементами, перемещают вниз посредством движущихся элементов на этапе Е.
22. Способ по п. 17, отличающийся тем, что перевозочное средство перемещают на этапе А так, чтобы тяжелый груз или ряд тяжелых грузов были расположены между двумя вертикальными опорными стойками или как минимум их продолжением.
23. Способ по п. 17, отличающийся тем, что зацепляющие элементы входят в зацепление с удлиненным тяжелым грузом или рядом тяжелых грузов на их верхней стороне на этапе С.
24. Способ по п. 17, отличающийся тем, что перевозочное средство перемещают на этапе Д так, чтобы расположить морской контейнер между двумя вертикальными опорными стойками.
25. Способ по п. 17, отличающийся тем, что используют устройство по п. 1 и основной рычаг проходит над морским контейнером на этапе Е.
26. Способ по п. 17, отличающийся тем, что груз представляет собой алюминиевую плиту.
27. Способ по п. 26, отличающийся тем, что используют устройство по п. 9, а плиту зацепляют с помощью всасывающих элементов на этапе В.
28. Способ по п. 17, отличающийся тем, что в ряду грузов или мешков, каждый груз или мешок имеет объем, равный как минимум 1 кубическому метру, и заполнен сыпучим материалом.
29. Способ по п. 28, отличающийся тем, что используют устройство по п. 15 и мешки входят в зацепление с помощью крючковых или закрепляющих элементов на этапе В.
30. Способ по п. 17, отличающийся тем, что груз представляет собой стальную пластину.
31. Способ по п. 30, отличающийся тем, что стальную пластину зацепляют с помощью магнитов на этапе В.
32. Способ по п. 17, отличающийся тем, что груз или ряд грузов весит как минимум 1000 кг, в предпочтительном варианте как минимум 5000 кг.
33. Способ разгрузки морского контейнера с удлиненным тяжелым грузом или рядом тяжелых грузов через открытую переднюю стенку с помощью устройства по любому из пп. 1-16, содержащий следующие этапы:
Л - перемещение перевозочного средства в первом направлении движения в продольном направлении морского контейнера со свободным краем подъемного рычага, направленным к отверстию в морском контейнере так, чтобы подъемный рычаг и зацепляющие элементы перемещались в морской контейнер через отверстие в морском контейнере как минимум до тех пор, пока зацепляющие элементы не окажутся непосредственно над тяжелым грузом или рядом тяжелых грузов;
М - зацепление зацепляющих элементов с тяжелым грузом или рядом тяжелых грузов;
Н - подъем устройством тяжелого груза, зацепляемого зацепляющими элементами, или ряда тяжелых грузов, зацепляемых зацепляющими элементам, в морском контейнере;
О - перемещение перевозочного средства во втором направлении движения противоположно первому направлению движения в продольном направлении морского контейнера как минимум до тех пор, пока подъемный рычаг полностью не выйдет за пределы морского контейнера;
П - высвобождение зацепления зацепляющих элементов с тяжелым грузом или рядом тяжелых грузов.
| СПОСОБ ПРОИЗВОДСТВА БИСКВИТА | 1992 |
|
RU2048106C1 |
| DE 10355946 A1, 07.07.2005 | |||
| US 2015151932 A1, 04.06.2015 | |||
| Кран | 1974 |
|
SU673593A1 |

