(54) КОЗЛОВОЙ КРАН

| название | год | авторы | номер документа |
|---|---|---|---|
| КОЗЛОВОЙ КРАН | 1969 |
|
SU241329A1 |
| ПНЕВМОКОЛЕСНЫЙ КОЗЛОВЫЙ КРАН | 1973 |
|
SU361972A1 |
| Козловой кран | 1975 |
|
SU541779A2 |
| ПОРТАЛЬНЫЙ КРАН | 2015 |
|
RU2654263C2 |
| УСТРОЙСТВО ДЛЯ УКЛАДКИ И ЗАМЕНЫ ЭЛЕМЕНТОВ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И СПОСОБ ЗАМЕНЫ ЭЛЕМЕНТОВ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 1992 |
|
RU2072015C1 |
| Подъемно-транспортное устройство для гидротехнических затворов | 1988 |
|
SU1749159A1 |
| Козловой кран | 1989 |
|
SU1776627A1 |
| СПОСОБ МОНТАЖА ПОРТАЛА БАШЕННОГО КРАНА | 2005 |
|
RU2297971C1 |
| Тележечный конвейер | 1983 |
|
SU1097531A1 |
| КОЗЛОВОЙ КРАН | 1992 |
|
RU2072960C1 |
I
Изобретение относится к подъемно-транс портному машиностроению, а именно к козловым кранам..
1 аиболее близким к изобретению по технической сущности является козловой кран, содержащий пролетное строение, одна из стоек которого установлена на поворотной относительно вертикальной оси ходовой тележке, а другая - на опорной балке, опирающейся на ходовые тележки, на вертикальных осях которых установлены звездочки, связанные между собой посредством цепи.. Колеса ходовых тележек выполнены управляемыми в горизонтальной плоскости - у тележек, установленных в опорной балке, с помощью рулевого механизма, а у тележки, связанной с опорной стойкой, с помощью рукоятки, которая может быть использована также для перемещения крана 1,;
Недостатком известного крана является невозможность регулирования ширины колеи и габарита крана по щирине. Кроме того, связь осей ходовых тележек, установленных в опорной балке посредством цепей передачи с пересекающимися ветвями, обеспечивает только два положения колёс ходовых тележек, при которых возможно перемещение крана - плоскости вращения колес параллельны плоскости портала ибо перпеидикулярны ей. Во всех остальных положениях плоскости вращения колес расположены под углом друг к другу и перемещение крана невозможно (кран заторможен). Таким образом, конструкция системы управления колесами ходовых тележек, установленных в опорной балке, обеспечивает возможность поступательного движения краНа только в
to плоскости портала или перпендикулярно к ней, что ограничивает маневренность крана в стесненных условиях.
Цель изобретения - повыщение маневренности крана за счет регулирования щирины колеи и габарита крана по щирине, а так
15 же обеспечение компактности в нерабочем положении для экономии производственной площади.
Поставленная цель достигается тем, что опорная балка выполнена поворотной относительно стойки и снабжена механизмом ее
фиксации относительно последней, а стойка, опирающаяся на опорную балку, снабжена блоком звездочек с цепями, связывающими
их со звездочками вертикальных осей ходовых- тележек параллельными ветвями.
Кроме того, блок звездочек может быть установлен на стонке с возможностью поворота и снабжен механизмом его фиксации относительно последней.
Звездочки могут быть установлены на вертикальных осях ходовых тележек с возможностью поворота и снабжены механизмами их фиксации относительно осей.
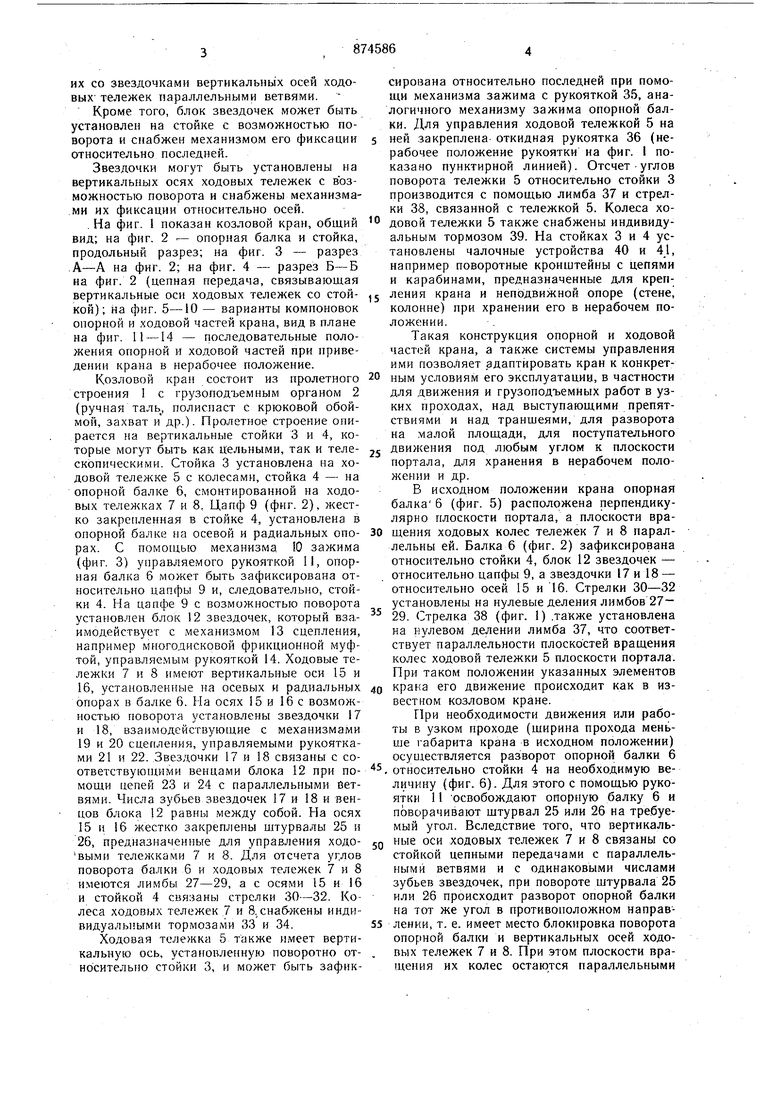
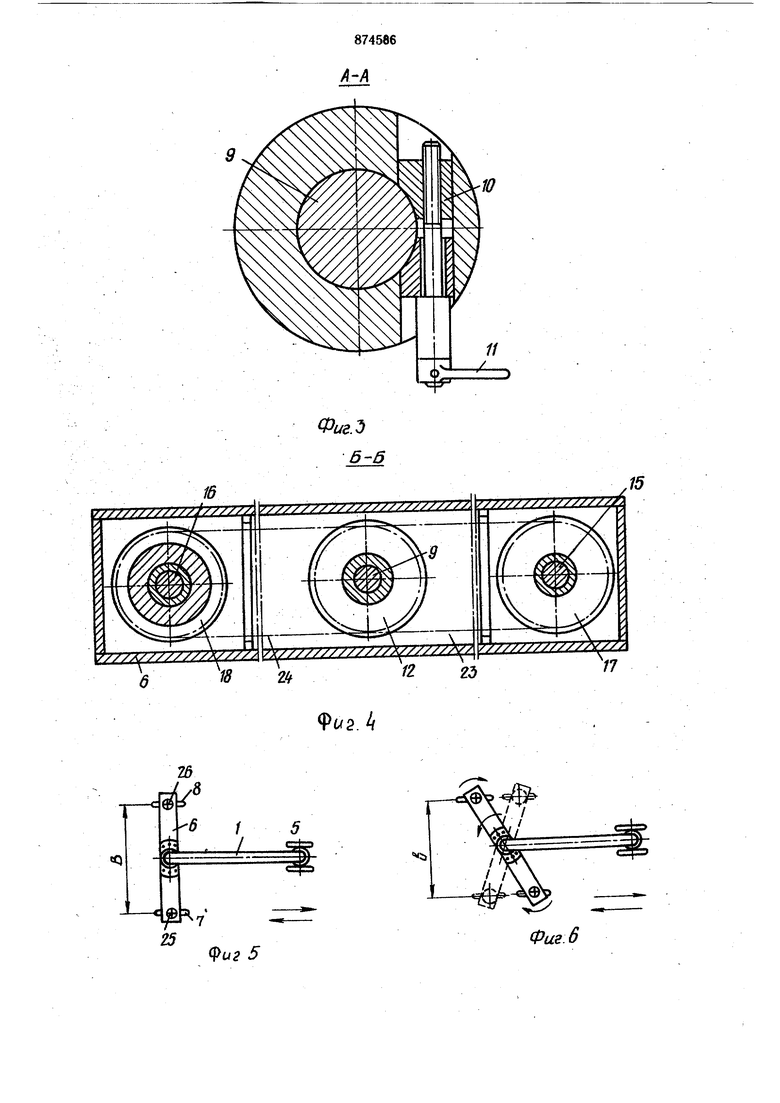
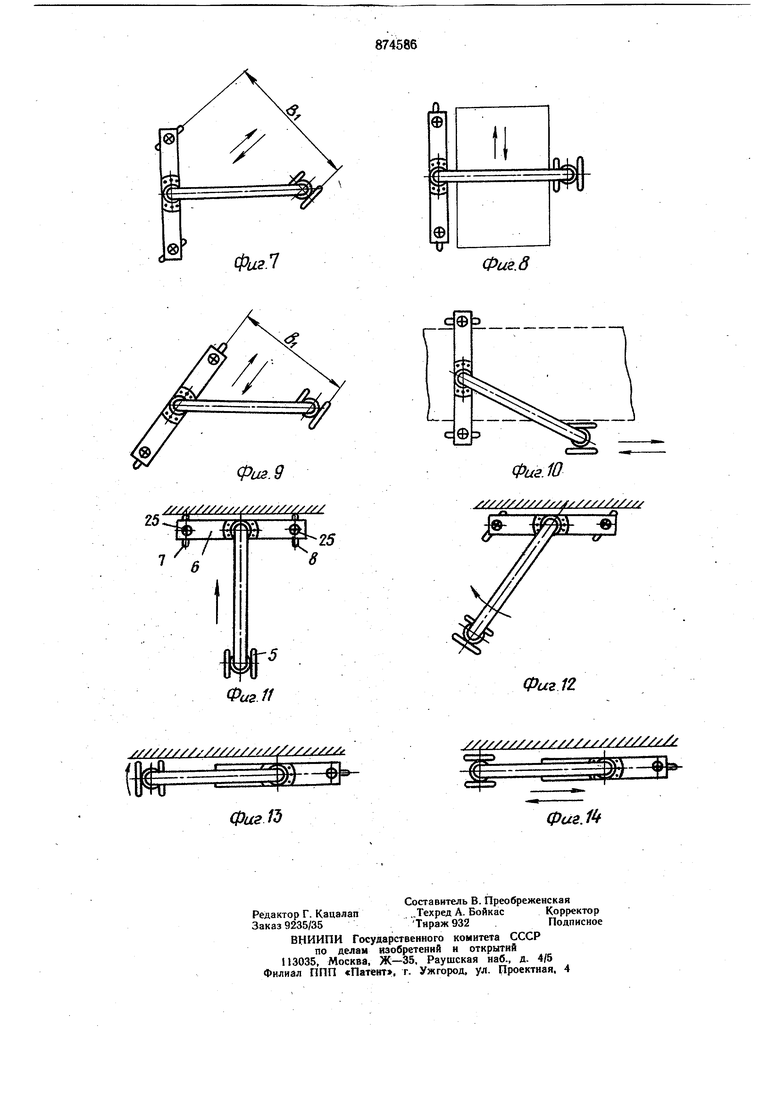
.На фиг. 1 показан козловой кран, общий вид; на фиг. 2 - опорная балка и стойка, продольный разрез; на фиг. 3 - разрез .А-А на фиг. 2; на фиг. 4 - разрез Б-Б на фиг. 2 (цепная передача, связывающая вертикальные оси ходовых тележек со стойкой); на фиг. 5-10 - варианты компоновок опорной и ходовой частей крана, вид в плане на фиг. 11 -14 - последовательные положения опорной и ходовой частей при приведении крана в нерабочее положение.
Козловой кран состоит из пролетного строения I с грузоподъемным органом 2 (ручная таль, полиспаст с крюковой обоймой, захват и др.). Пролетное строение опирается на вертикальные стойки 3 и 4, которые могут быть как цельными, так и телескопическими. Стойка 3 установлена на ходовой тележке 5 с колесами, стойка 4 - на опорной балке 6, смонтированной на ходовых тележках 7 и 8, Цапф 9 (фиг. 2), жестко закрепленная в стойке 4, установлена в опорной балке на осевой и радиальных опорах. С помощью механизма Ю зажима (фиг. 3) управляемого рукояткой II, опорная балка 6 может быть зафиксирована относительно цапфы 9 и, следовательно, стойки 4. На цапфе 9 с возможностью поворота установлен блок 12 звездочек, который взаимодействует с механизмом 13 сцепления, например многодисковой фрикционной муфтой, управляе.мым рукояткой 14. Ходовые тележки 7 и 8 имеют вертикальные оси 15 и 16, установленные на осевых и радиальных опорах в балке 6. На осях 15 и 16 с возможностью поворота установлены звездочки 17 и 18, взаимодействующие с механизмами 19 и 20 сцепления, управляемыми рукоятками 21 и 22. Звездочки 17 и 18 связаны с соответствующими венцами блока 12 при помощи цепей 23 и 24 с параллельными йетвями. Числа зубьев звездочек 17 и 18 и венцов блока 12 равны между собой. На осях 15 и 16 жестко закреплены штурвалы 25 и 26, предназначенные для управления ходовыми тележками 7 и 8. Для отсчета углов поворота балки 6 и ходовых тележек 7 и 8 имеются лимбы 27-29, а с осями 15 и 16 и стойкой 4 связаны стрелки 30-32. Колеса ходорзых тележек .7 и 8.,снаб-жены индивидуальными тормозами 33 и 34.
Ходовая тележка 5 также имеет вертикальную ось, установленную поворотно относительно стойки 3, и может быть зафиксирована относительно последней при помощи механизма зажима с рукояткой 35, аналогичного механизму зажима опорной балки. Для управления ходовой тележкой 5 на
ней закреплена откидная рукоятка 36 (нерабочее положение рукоятки на фиг. I показано пунктирной линией). Отсчет углов поворота тележки 5 относительно стойки 3 производится с помощью лимба 37 и стрелки 38, связанной с тележкой 5. Колеса ходовой тележки 5 также снабжены индивидуальным тормозом 39. На стойках 3 и 4 установлены чалочные устройства 40 и 41, например поворотные кронщтейны с цепями и карабинами, предназначенные для креплени я крана и неподвижной опоре (стене колонне) при хранении его в нерабочем положении.
Такая конструкция оцорной и ходовой частей крана, а также системы управления ими позволяет адаптировать кран к конкретным условиям его эксплуатации, в частности для движения и грузоподъемных работ в узких проходах, над выступающими препятствиями и над траншеями, для разворота на малой площади, для поступательного
движения под любым углом к плоскости портала, для хранения в нерабочем положении и др.
в исходном положении крана опорная балка 6 (фиг. 5) расположена перпендикулярно плоскости портала, а плоскости вращення ходовых колес тележек 7 и 8 параллельны ей. Балка 6 (фиг. 2) зафиксирована относительно стойки 4, блок 12 звездочек - относительно цапфы 9, а звездочки 17 и 18 - относительно осей 15 и 16. Стрелки 30-32 установлены на нулевые деления лимбов 27-
крана его движение происходит как в известном козловом кране.
При необходимости движения или работы в узком проходе (ширина прохода меньше габарита крана в исходном положении) осуилествляется разворот опорной балки 6
относительно стойки 4 на необходимую величину (фиг. 6). Для этого с помощью рукоятки 11 освобождают опорную балку 6 и поворачивают штурвал 25 или 26 на требуемый угол. Вследствие того, что вертикальные оси ходовых тележек 7 и 8 связаны со стойкой цепными передачами с параллельными ветвями и с одинаковыми числами зубьев звездочек, при повороте штурвала 25 или 26 происходит разворот опорной балки на тот же угол в противоположном направлении, т. е. имеет место блокировка поворота опорной балки и вертикальных осей ходовых тележек 7 и 8. При этом плоскости вращения их колес остаются параллельными своему начальному положению (в данном случае - плоскости портала) независимо от величины угла поворота штурвала. Поху1е разворота опорной балки б П1эоизводится ее фиксация относительно стойки 4 с помощью рукоятки 11. Разворот опорной балки б относительно стойки 4 может быть выполнен и другим способом. Произведя расфиксацию балки н затормозив колеса ходовых тележек 7 и 8, поворачивают- портал относительно оси поворота опорной балки, как это показано на фиг. 12, с последующей фиксацией балки относительно стойки. Максимально допустимый угол разворота опорной балки и, следовательно, минимальные щирина колеи и габарит крана по ширине в рабочем положении определяются из соображений техники безопасности по критерию устойчивости крана. В тех случаяз, когда не требуется описанная блокировка поворота опорной балки 6и вертикальных осей 15 и 16 ходовых тележек 7 и 8(фиг. 2)-, маневренность крана может быть значительно увеличена за счет свободного вращения блока 12 звездочек относительно цапфы 9, что достигается путем выключения механизма 13 сцепления посредством рукоятки 14. В этом случае, благодаря связи посредством цепной передачи с параллельными ветвями и передаточным отношением 1:1, поворот вертикальных осей ходовых тележек 7 и 8 может осуществляться с помощью соответственно штурвала 25 и 26 на любой угол к плоскости портала, т. е. все колеса крана являются управляемы. ми в горизонтальной плоскости. Включение механизма 13 сцепления фиксирует тележки 7 и 8 в достигнутом угловом положении. Возможность независимого парного управления тележками 7 и 8 облегчает разворот крана- на малой площади и обеспечивает его поступательное движение под любым углом к плоскости nopTa ia (фиг. 7), в том числе перпендикулярно к ней (фиг. 8). В последнем случае обеспечивается движение и грузоподъемные работы над выступающими препятствиями и над траншеями. Использование независимого парного управления ходовыми тележками 7 и 8 в сочетании с разворотом опорной балки 6 обеспечивает большое количество компоновок опорной и ходовой частей крана,-целесообразных в тех или иных конкретных условиях. На фиг. 9 показана компоновка для поступательного движения под произвольным углом к плоскости портала и с минимальным габаритом по ширине. Наличие лимбов позволяет разворачивать ходовые тележки 5, 7и 8 и опорнуюбалку б точно на заданные углы, что сокращает время переналадки и облегчает маневрирование краном. Выключение механизмов 19 и 20 сцепления (фиг. 2) обеспечивает независимое управление каждой из ходовых тележек 7 и 8, ЧТО может быть использовано, например, для фиксации крана в заданном положении путем разворота колес указанных тележек под углом друг к другу. Возможность разворота опорной балки относительно стойки вплоть до совмещения балки с плоскостью портала обеспечивает трансформацию крана при нерабочем положении в плоскую конструкцию велосипедного типа. Благодаря этому обеспечивается компактность крана в нерабочем положении и достигается экономия производственной площади при его хранении. Наиболее просто и безопасно приведение крана в нерабочее положение осуществляется с использованием блокировки поворота опорной балки и вертикальных осей связанных с ней ходовых тележек. Порядок приведения крана в нерабочее положение. Кран перемещается балкой вперед до неподвижной опоры Эстены, колонны), у которой он будет храниться (фиг. 11). После затормаживания колес ходовых тележек 7 и 8 и расфиксации опорной балки б производится поворот портала, как указано на фиг. 12. После совмещения плоскости портала с опорной балкой (фиг. 13) ходовая тележка 5 разворачивается таким образом, что плоскости врацхения ее колес параллельны плоскости портала. Такое положение колес ходовых тележек 5, 7 и 8 предотвращает возможность самопроизвольного отъезда крана от опоры перпендикулярно плоскости портала. После этого ходовая тележка 5 и опорная балка 6 фиксируются относительно соответствующих стоек. В случае необходимости кран в этом положении может перемещаться в плоскости портала. Для обеспечения безопасного хранения крана с помощью чалочных устройств 40 и 41 (фиг. I) крепится к опоре. Таким образом, изобретение обеспечивает повышение маневренности крана в работе и компактность его в нерабочем положении, что в свою очередь обеспечивает экономию произврдственйой площади. Предлагаемый козловой кран наиболее эффективно может быть использован для выполнения подъемно-транспортных работ при отсутствии стационарных грузоподъемных механизмов или в малодоступных местах зданий и сооружений, в стесненных или в полевых условиях, а также во взрывоопасных помещениях. Формула изобретения 1. Козловой кран, содержащий пролетное строение, одна из стоек которого установлена на поворотной относительно вертикальной оси ходовой тележке, а другая - на опорной балке, опирающейся на ходовые
тележки, на вертикальных осях которых установлены звездочки, связанные между собой посредством цепи, отличающийся тем, что, с целью повышения его маневренности и обеспечения компактности в нерабочем положении, опорная балка выполнена поворотной относительно стойки и снабжена механизмом ее фиксации относительно последней, а стойка, опирающаяся на опорную балку, снабжена блоком звездочек с цепями, связывающими их со звездочками вертикальных осей параллельными ветвями.
Источники информации, принятые во внимание при экспертизе
К Патент СССР № 241329, кл. В 66 С 5/06, 1966 (прототип).
фиг. 2
Фиг.: 6-6
Ф(/2.4
«5
5
Фиг. 6
Фиг. 8
Физ.д //////// ///////// //jf///
25
25
I
8
Фиг 10
уХ У/ УХ/ХХ/ уу/х/хХ ///х
////Х////х////////Х/Х///х///
Л
ш-1Г
Х/Х////////х/// -//////Х//у
фиг /5
Фи&. /4
