Изобретение относится к средствам захвата, перемещения и установки крупногабаритных грузов, в частности, крупногабаритных объемных модулей и может быть использовано в области строительства.
Из уровня техники широко известны краны козлового типа, например, для погрузки контейнеров. Такие краны содержат опорные стойки, которые соединены с колесами и с несущей рамой. Колеса в основном предназначены для перемещения по рельсовым путям, и такие краны ограничены в перемещении груза (см., например, https://tehnoros.ru/products/konteynernye-krany/kkk/).
Недостатком таких кранов является то, что они ограничены в перемещении груза по площадке, не имеют маневренности, а также не способны с высокой точностью без перекосов позиционировать груз.
Наиболее близким к предложенному решению является портальный погрузчик, содержащий раму, имеющую практически параллельные противоположные стороны и конфигурацию, позволяющую охватывать контейнер для того, чтобы поднимать и транспортировать его, удерживая между указанными противоположными сторонами, множество ходовых колес, позволяющих располагать раму над контейнером, а также средства для подъема контейнера внутри рамы, при этом ходовые колеса включают первое ходовое колесо, расположенное в первом положении по меньшей мере приблизительно по центру на одной стороне рамы, а также второе и третье ходовые колеса, расположенные соответственно во втором и третьем положениях, находящихся на противоположных краях второй стороны рамы или возле них, при этом направлением движения второго и третьего колес можно управлять путем их поворота вокруг соответствующих практически вертикальных осей, и при этом опора погрузчика на поверхность земли осуществляется за счет его полного контакта с ней в указанных первом, втором и третьем положениях (см. Патент RU 2526019, опубликован 27.03.2014 г.).
Недостатком такого портального погрузчика является невысокая маневренность, а также отсутствие возможности высокоточного позиционирования груза без его перекосов в горизонтальной плоскости.
Технической проблемой, решаемой изобретением, является повышение надежности и точности перемещения и позиционирования груза с сохранением его качества.
Техническим результатом изобретения является обеспечение возможности быстрого, всенаправленного и высокоманевренного перемещения груза по неограниченной площади при одновременном повышении точности позиционирования груза с сохранением его качества за счет отсутствия перекосов при его транспортировке, позиционировании и установке.
Технический результат изобретения достигается благодаря тому, что портальный транспортер содержит опорные стойки, каждая из которых одним своим концом соединена с соответствующей колесной парой, имеющей привод и выполненной с возможностью вращения вокруг вертикальной оси в противоположных направлениях, а другим своим концом соединена с несущей рамой, имеющей две параллельные продольные несущие балки и две поперечные балки, на указанных несущих балках установлены своими противоположными концами с возможностью перемещения вдоль них по меньшей мере три мостовых крана, на каждом мостовом кране установлены лебедки, а также тележки, выполненные с возможностью перемещения вдоль мостового крана, каждая лебедка имеет трос, связанный с соответствующей тележкой и соединенный с поворотным замком для зацепления с грузом, транспортер также содержит кабину управления, блок питания и генераторную установку.
Кроме того, на каждом мостовом кране может быть установлено две лебедки, которые могут быть закреплены на противоположных концах мостового крана.
Кроме того, на каждом мостовом кране может быть установлено две тележки, и две лебедки, при этом одна лебедка может быть закреплена на одной тележке, а другая лебедка может быть закреплена на другой тележке.
В кабине управления может быть размещена система управления, связанная с приводом каждой колесной пары, с каждым мостовым краном, с каждой лебедкой, с каждой тележкой и с каждым поворотным замком.
Кроме того, портальный транспортер может включать пульт дистанционного управления, связанный с системой управления.
Портальный транспортер также может включать датчики положения, тензодатчики, а также аварийные выключатели.
Кроме того, каждый поворотный замок может иметь привод и соединенный с ним пикообразный поворотный элемент, выполненный с возможностью зацепления с подъемной закладной груза.
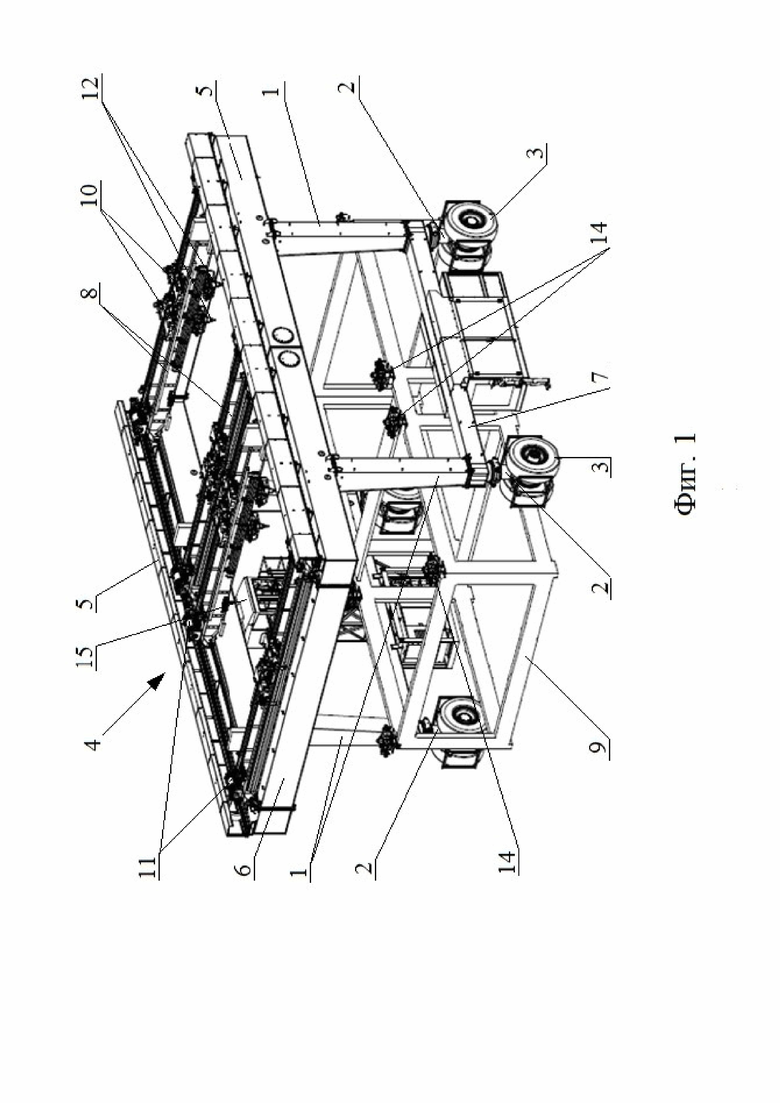
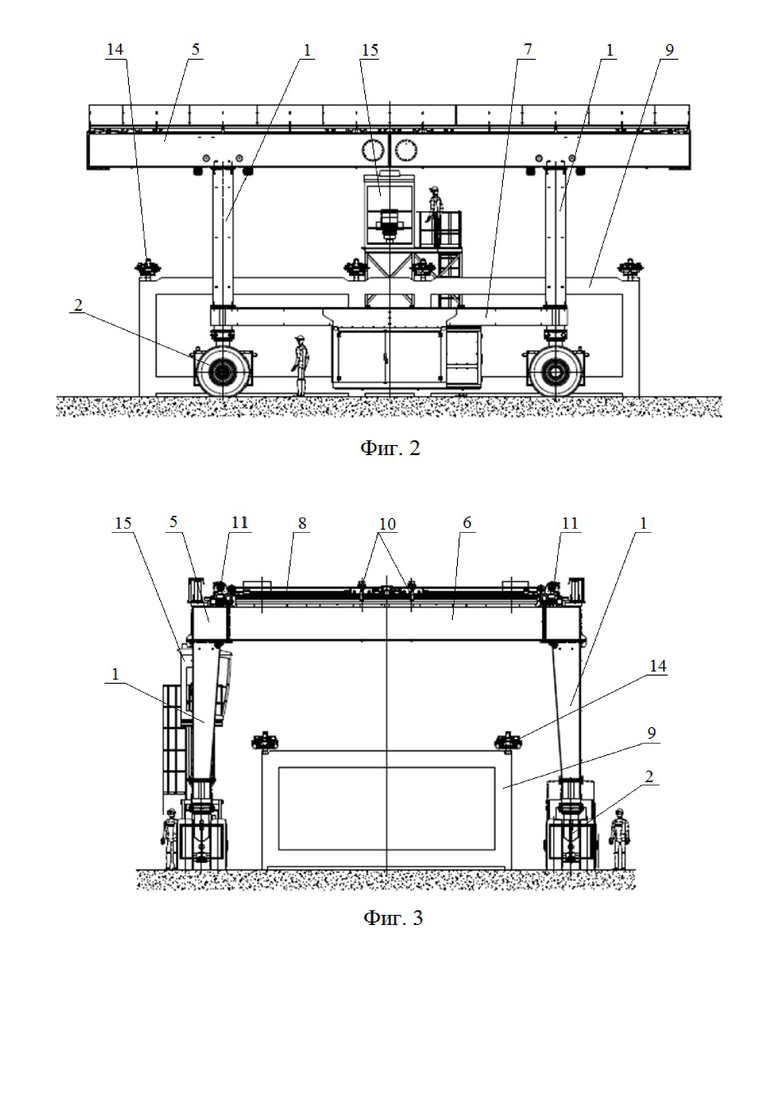
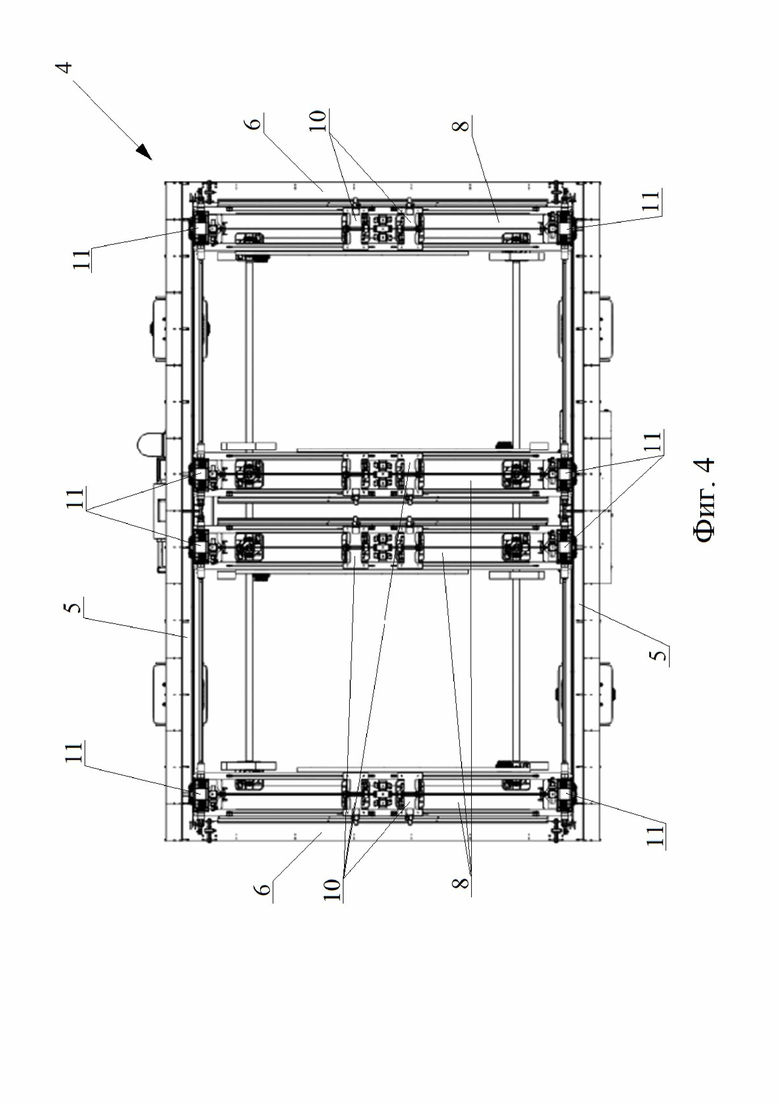
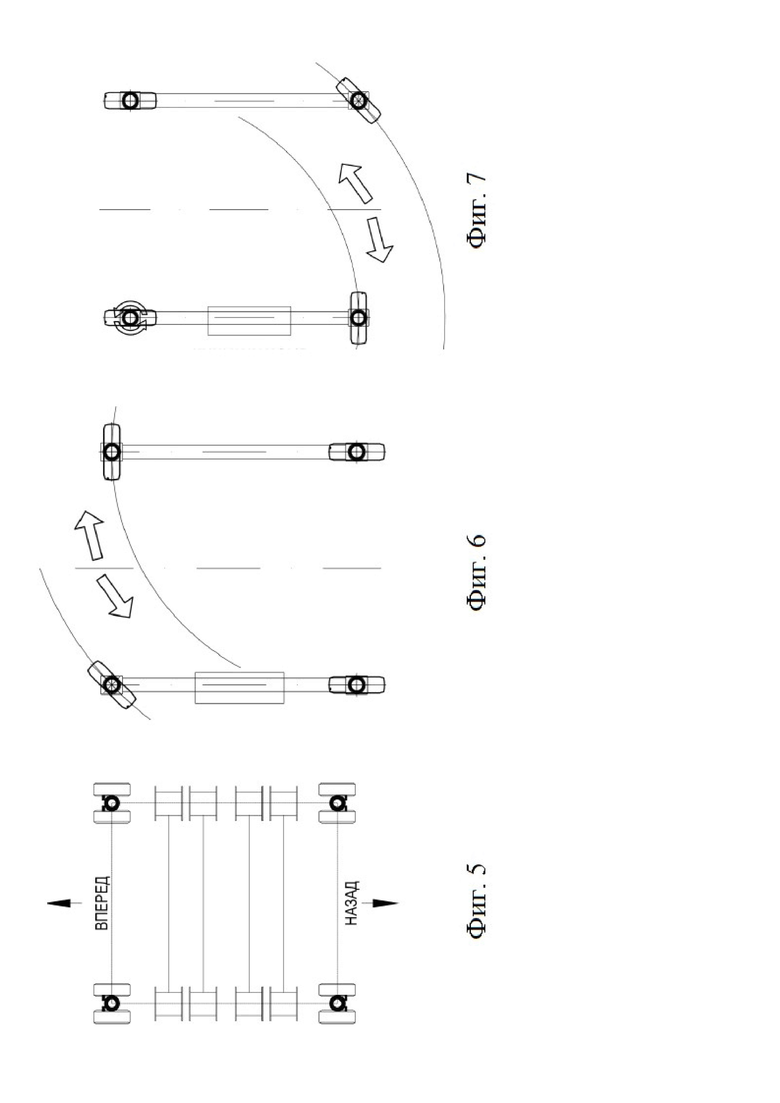
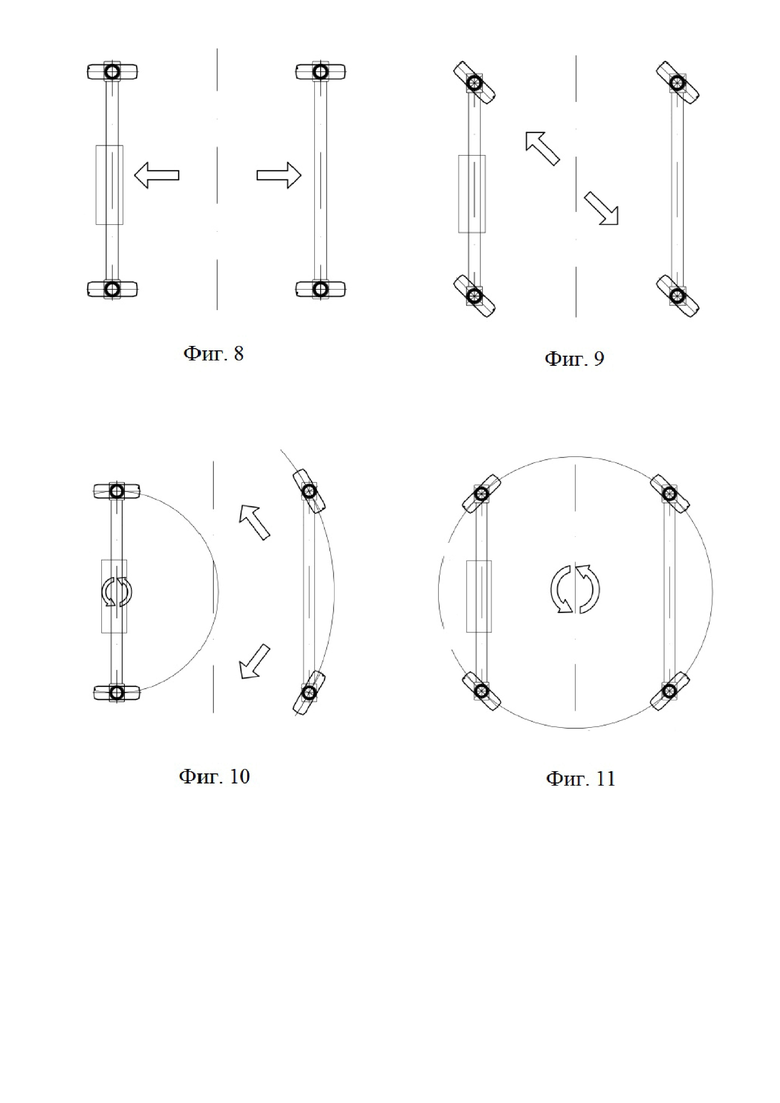
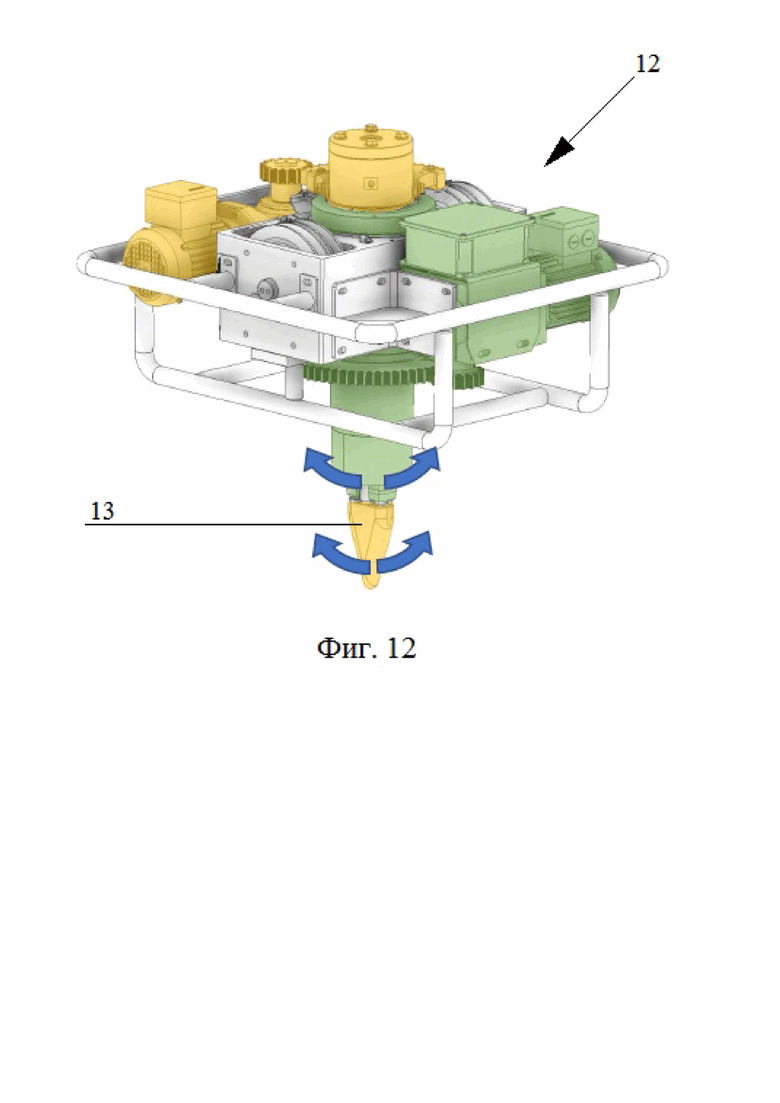
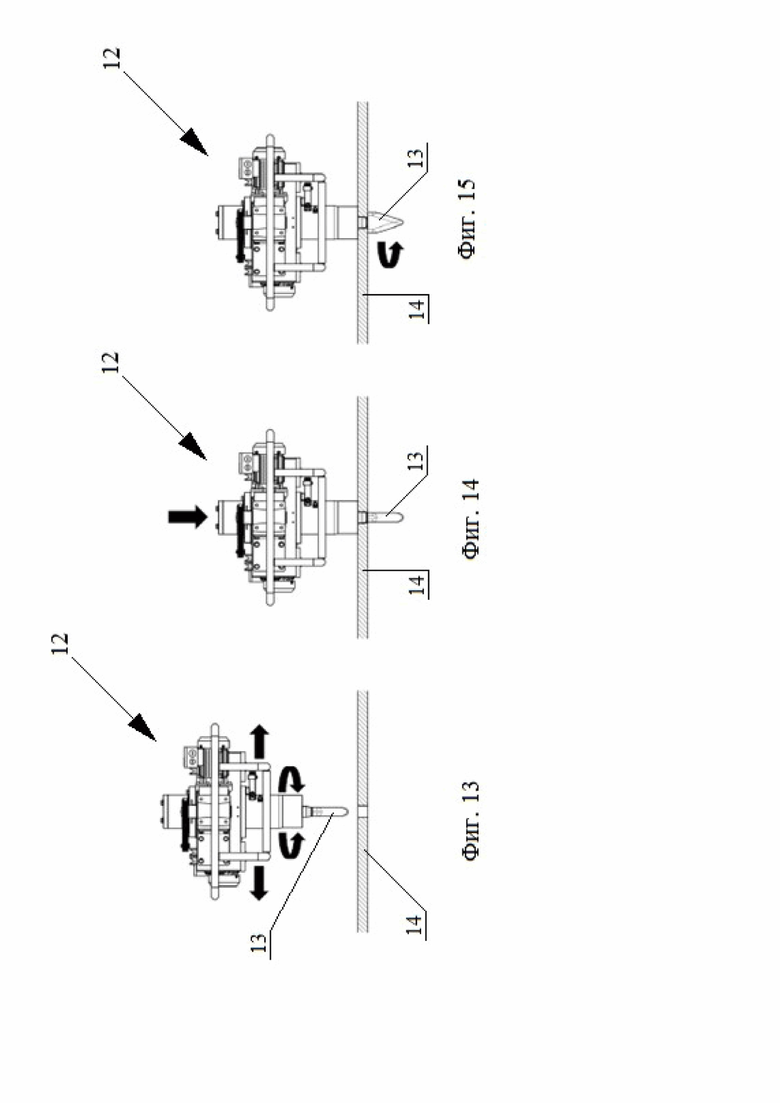
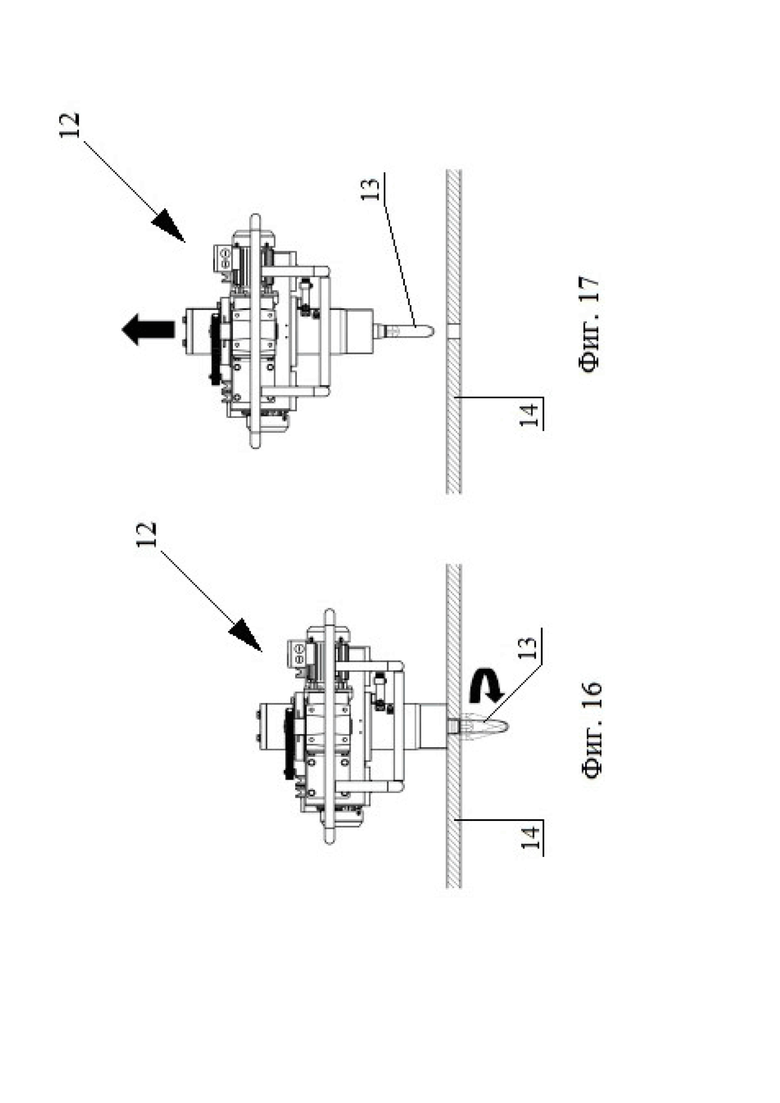
Изобретение поясняется чертежами, где на фиг. 1 показан предложенный мобильный портальный транспортер, вид в аксонометрии; на фиг. 2 показан вид портального транспортера сбоку; на фиг. 3 показан вид портального транспортера спереди; на фиг. 4 показан вид портального транспортера сверху; на фиг. 5 – 11 показаны варианты перемещения портального транспортера; на фиг. 12 показан поворотный замок; на фиг. 13 – 17 показаны положения поворотного замка при зацеплении и расцеплении с подъемной закладной перемещаемого груза.
Предложенный мобильный портальный транспортер представляет собой управляемый высокоманевренный всенаправленный транспортный погрузчик, который предназначен, преимущественно, для захвата, подъема, перемещения по неограниченной производственной площадке и погрузки на транспортные средства (для дальнейшего перемещения на строительные площадки) крупногабаритных готовых объемных модулей, образующих готовые помещения (квартиры, приквартирные холлы, офисные помещения и т.п.).
Портальный транспортер содержит, преимущественно, четыре опорные вертикальные металлические стойки 1 (однако их число может быть и большим, например, пять или шесть или большее число стоек 1). Каждая стойка 1 одним своим концом с нижней стороны соединена со своей колесной парой 2, которая выполнена с возможностью вращения вокруг вертикальной оси в противоположных направлениях. То есть каждая колесная пара 2 способна поворачиваться на 360˚ как по часовой стрелке, так и против часовой стрелки. Каждая колесная пара 2 имеет, преимущественно, свой собственный индивидуальный привод, который приводит в движение колесную пару 2, то есть вращает сами колеса 3 вокруг горизонтальной оси колеса 3 (в противоположных направлениях) и поворачивает колесную пару 2 вокруг вертикальной оси, которая может совпадать с вертикальной осью своей стойки 1. При этом у каждой колесной пары 2 может быть один привод как для вращения самих колес 3 (вокруг их горизонтальной оси для перемещения самого транспортера), так и для поворота колесной пары 2 (вокруг вертикальной оси), а также может быть отдельный привод для вращения колес 3 (вокруг их горизонтальной оси) и отдельный привод для поворота колесной пары 2 (вокруг вертикальной оси). При этом может быть использован любой известный существующий привод.
Каждая стойка 1 другим своим концом с верхней стороны жестко соединена (болтовым или сварным соединением) с усиленной металлической несущей рамой 4. Рама 4 включает две продольные параллельные несущие балки 5, а также две параллельные поперечные балки 6, соединенные своими соответствующими концами с соответствующими концами продольных балок 5. Рама 4 может иметь сегментную (сборную) конструкцию, т.е. состоящую из нескольких жестко соединенных друг с другом частей.
Кроме того, каждая пара стоек 1 для усиления жесткости предложенного транспортера может быть соединена усиленной балочной перемычкой 7, расположенной, преимущественно, параллельно несущей балке 5. Число таких перемычек 7 может быть от одной и более, т.е. например, одна перемычка 7 своими противоположными концами может быть соединена с соответствующей парой стоек 1 в зоне расположения колесной пары 2, а другая перемычка 7 своими противоположными концами может быть соединена с соответствующей парой стоек 1, например, в их срединной части (не показано).
На несущей раме 4 установлены мостовые краны 8. При этом мостовые краны 8 установлены на несущих балках 5 (перпендикулярно им) своими противоположными концами. Краны 8 установлены с возможностью перемещения вдоль несущих балок 5 (вдоль рамы 4) как в одну, так и в другую (противоположную) сторону. Число мостовых кранов 8 может быть от трех и более. Преимущественно, предложенный транспортер имеет четыре мостовых крана 8, два из которых (крайние) предназначены, преимущественно, для связи с торцевыми сторонами объемного модуля 9 (в верхней части), а два других крана 8 для связи со срединной частью объемного модуля 9.
Каждый мостовой кран 8 может иметь либо свой собственный индивидуальный привод перемещения (не показан), либо все краны 8 могут иметь один общий привод перемещения, либо одна часть кранов 8 имеет один общий привод, а другая часть кранов 8 имеет другой общий привод перемещения (не показаны). При этом для перемещения кранов 8 вдоль балок 5 может использоваться любой известный привод перемещения (электрический, гидравлический, пневматический и т.п.). Кроме того, для перемещения кранов 8 вдоль балок 5 может также использоваться цепная или ременная передача. Кроме того, каждая несущая балка 5 может иметь направляющие (не показаны), по которым перемещаются краны 8. Либо каждая несущая балка 5 может иметь зубчатую рейку (не показана), по которой может перемещаться шестерня привода соответствующего мостового крана 8. Перемещение кранов 8 возможно до любого положения на раме 4, обеспечивающего необходимое и точное позиционирование для последующего захвата груза (объемного модуля 9).
На каждом мостовом кране 8 установлено, преимущественно, по две тележки 10. Однако число тележек 10 при необходимости может быть большим (три или четыре и т.д.) в зависимости от необходимого числа точек зацепления на перемещаемом грузе (модуле 9) и точного позиционирования перемещаемого груза. Каждая тележка 10 на каждом мостовом кране 8 установлена с возможностью перемещения вдоль своего мостового крана 8 как в одну, так и в другую сторону.
При этом каждая тележка 10 на своем мостовом кране 8 может иметь либо свой собственный привод перемещения, либо они могут иметь один общий привод перемещения (не показан). Для перемещения тележек 10 вдоль своего мостового крана 8 может использоваться любой известный привод перемещения (электрический, гидравлический, пневматический и т.п.). Кроме того, для перемещения тележек 10 может также использоваться цепная или ременная передача. Кроме того, каждый мостовой кран 8 может иметь направляющие (не показаны), по которым перемещаются тележки 10. Либо каждый мостовой кран 8 может иметь зубчатую рейку (не показана), по которой могут перемещаться шестерни приводов тележек 10. Перемещение тележек 10 возможно до любого положения на мостовом кране 8, обеспечивающего необходимое и точное позиционирование для последующего захвата груза (объемного модуля 9).
Также на каждом мостовом кране 8 установлено, преимущественно, по две лебедки 11. Однако число лебедок 11 при необходимости может быть большим (три или четыре и т.д.) в зависимости от числа тележек 10 и поворотных замков 12. Лебедки 11 жестко закреплены, преимущественно, на противоположных концах мостового крана 8 (то есть одна лебедка 11 закреплена на одном конце крана 8, а другая – на другом конце крана 8). Жесткое крепление лебедок 11 к своему крану 8 может быть выполнено любым известным способом, например, с помощью болтового соединения или с помощью сварки, либо любым иным способом, обеспечивающим жесткое крепление лебедки 11 к крану 8. В вариантном исполнении каждая лебедка 11 на каждом мостовом кране 8 может быть жестко закреплена на соответствующей тележке 10 с возможностью перемещения вместе с тележкой 10.
Каждая лебедка 11 имеет трос (или группу тросов), связанный с соответствующей тележкой 10. С каждой тележкой 10 посредством системы тросов соединен поворотный замок 12 (подвешен к тележке), при этом с подвесом поворотного замка 12 также соединен трос соответствующей лебедки 11 с возможностью перемещения замка 12 в вертикальном направлении. Для неизменного высотного положения поворотного замка 12 (в вертикальном направлении) каждый мостовой кран 8 (или тележки 10) снабжен системой запасовки тросов с обводными блоками (не показаны), позволяющими не включаться лебедкам 11 при перемещении тележек 10 вдоль своего мостового крана 8. В случае необходимости изменения высотного положения поворотного замка 12 (подъема/опускания), включается в работу лебедка 11. В вариантном исполнении регулировка высотного положения замков 12 может осуществляться автоматически, при этом привод тележки 10 может работать синхронно с лебедкой, тем самым обеспечивая неизменное высотное положение поворотного замка 12.
Каждый поворотный замок 12 имеет привод и соединенный с ним пикообразный поворотный элемент 13, выполненный с возможностью зацепления с подъемной закладной 14 груза (объемного модуля 9).
Поворотный замок 12 спроектирован таким образом, чтобы поворачивать с помощью привода поворотный элемент 13 на ±90° (по часовой стрелке и против часовой стрелки) вокруг своей вертикальной оси (чтобы лучше приспособить его к ориентации отверстия в подъемной закладной 14 груза, который требуется зацепить (застропить) / расцепить (расстропить) благодаря одному электродвигателю).
Предложенный портальный транспортер содержит кабину 15 управления, которая может быть жестко закреплена или на раме 4, или на перемычке 7, или одновременно и на перемычке 7 (нижней частью) и на раме 4 (верхней частью). Жесткое крепление кабины 15 также может быть обеспечено любым известным способом (сваркой, болтовым соединением и т.п.). С кабиной 15 управления может быть жестко соединена лестница, либо с ней может быть связан лифт (не показаны) для подъема/опускания оператора (персонала).
В кабине 15 управления установлена система управления, которая, помимо прочего, включает радиомодули, процессоры, различные датчики, индикаторы, специальное программное обеспечение, предназначенные для связи и управления приводами всех рабочих органов погрузчика (колесной пары 2 с колесами 3, мостового крана 8, тележек 10, лебедок 11, поворотных замков 12 и т.д.), а также для контроля процесса работы и управления транспортера, и контроля точного зацепления / подъема / позиционирования / перемещения / опускания груза (объемного модуля 9).
Предложенный транспортер также содержит блок питания и генераторную установку (не показаны). Блок питания может быть расположен и жестко закреплен или в кабине 15 управления, или на раме 4, или на перемычке 7 и предназначен для питания системы управления, рабочих органов транспортера и всей входящей в погрузчик электроники. Генераторная установка может быть жестко закреплена или на раме 4 или на перемычке 7, или на кабине 15 и предназначена для автономного электроснабжения транспортера.
Предложенный транспортер также включает пульт дистанционного радиоуправления, связанный с системой управления, с помощью которого может осуществляться дистанционное управление всей работой транспортера (рабочими органами) и контроль состояния работы.
Погрузчик также включает: выравниватели положения груза 9 (обеспечивают высокоточное положение объемного модуля 9, исключая какие-либо перекосы), датчики положения рабочих органов и перемещаемого груза 9 (при подъеме и опускании), которые могут применяться к лебедкам при натяжении тросов; тензодатчики, с помощью которых контролируется натяжение тросов и которые могут применяться к выравнивателям; аварийные выключатели, которые могут применяться к колесам 3, к генераторной установке, к системе управления в кабине 15, а также к пульту дистанционного управления. Выравниватели положения, а также все датчики связаны с системой управления с возможностью осуществления автоматической работы транспортера.
Работает предложенный транспортер следующим образом.
С помощью дистанционного пульта управления, либо с помощью системы управления, расположенной в кабине 15, оператор приводит в движение транспортер и перемещает его до места расположения объемного модуля 9, который необходимо переместить для погрузки на транспортное средство для последующей перевозки его на строительную площадку. Транспортер своей портальной частью подъезжает к модулю 9 так, что модуль 9 располагается под рамой 4 между стойками 1, то есть транспортер охватывает модуль 9.
Транспортер может выполнять множество различных комбинаций рулевого управления (от шести и более комбинаций). Можно выбрать одно из них с помощью переключателя, который размещен на пульте дистанционного радиоуправления и/или в кабине 15 управления.
Далее приводятся в движение мостовые краны 8 и тележки 10 до необходимого положения, соответствующего подъемным закладным 14 на модуле 9. Контроль необходимого высокоточного положения осуществляется с помощью датчиков. Далее с помощью лебедок 11 приводятся в движение тросы и поворотные замки 12 опускаются до подъемных закладных 14 модуля 9. Поворотным замком 12 возможно управлять из кабины 15, либо через пульт дистанционного радиоуправления.
Поворотный замок 12 подносится к отверстию в соответствующей подъемной закладной 14 груза (фиг. 13), затем положение и его ориентация регулируется, чтобы «пикообразная» часть 13 поворотного замка 12 впоследствии вошла в отверстие подъемной закладной 14 груза 9.
Поворотный замок 12 опускается в отверстие подъемной закладной 14 груза 9 (фиг. 14). Осуществляют контроль разблокировки поворотного замка 12. Далее с помощью привода поворотного замка 12 осуществляют поворот «пикообразной» части 13 поворотного замка 12 в положение блокировки (фиг. 15).
С помощью лебедок 11 поднимают объемный модуль 9, осуществляют точное позиционирование его в горизонтальной плоскости, выравнивателями контролируют положение модуля 9 и при необходимости осуществляют регулировку положения модуля 9 в горизонтальной плоскости. Фиксируют положение модуля 9 и транспортер перемещает модуль 9 по производственной площадке до транспортного средства. Далее транспортер подъезжает к транспортному средству так, что оно располагается между стойками 1 транспортера. За счет возможности перемещения транспортера в любом направлении (прямолинейное движение, вращательное, боковое и т.п.) транспортер способен маневрировать в любых направлениях до высокоточного положения и высокоточной ориентации модуля 9.
Далее осуществляют высокоточную установку модуля 9 на транспортное средство (лебедки 11 опускают груз), контролируя при этом с помощью датчиков строго горизонтальное положение модуля 9 без перекосов.
После установки модуля 9 на транспортное средство «пикообразная» часть 13 поворотного замка 12 поворачивается в положение разблокировки (фиг. 16). После полной разблокировки поворотный замок 12 поднимается до полного извлечения его «пикообразной» части 13 из подъемной закладной 14 груза 9 (фиг. 17).
Таким образом, благодаря вышеописанному выполнению предложенного мобильного портального транспортера для перемещения, погрузки и разгрузки крупногабаритных объемных модулей 9, обеспечивается высоконадежное, точное перемещение и позиционирование модуля 9 с сохранением его качества при перемещении и погрузке на транспортные средства. Вращение всех колесных пар 2 вокруг вертикальных осей обеспечивают всенаправленное движение транспортера и высокую маневренность, что позволяет быстро переместить транспортер к объемному модулю 9, а также быстро переместить объемный модуль 9 по производственной площадке к транспортному средству для последующего перемещения модуля 9 на строительную площадку. В результате существенно сокращается время доставки объемных модулей 9 на строительную площадку. Выполнение рамы 4 с подвижными кранами 8, тележками 10, лебедками 11 и поворотными замками 12 позволяет точно ориентировать и позиционировать замки 12 относительно подъемных закладных 14 модуля 9, позволяя быстро и надежно осуществить захват модуля 9. Контроль с помощью системы управления положения захваченного модуля 9 обеспечивает точное горизонтальное положение модуля 9 как при его захвате и подъеме, так и в процессе перемещения и последующем опускании, в результате чего исключаются какие-либо перекосы модуля 9 и, тем самым, сохраняется его качество.
| название | год | авторы | номер документа |
|---|---|---|---|
| КРАН | 2023 |
|
RU2812497C1 |
| Судно - плавучая база автономных необитаемых подводных аппаратов | 2021 |
|
RU2753062C1 |
| ВЕСОПОВЕРОЧНЫЙ КОМПЛЕКС | 2019 |
|
RU2712533C1 |
| РАМПОВЫЙ ГРУЗОВОЙ САМОЛЁТ | 2017 |
|
RU2668012C1 |
| УСТРОЙСТВО И.И.СТАШЕВСКОГО ДЛЯ ПОДЪЕМА ЗАТОНУВШИХ БРЕВЕН СО ДНА РЕКИ | 1992 |
|
RU2025432C1 |
| Разгрузочно-погрузочный манипулятор-тренажёр с параллельным тросовым приводом | 2023 |
|
RU2835999C1 |
| СПОСОБ СТАШЕВСКОГО И.И. ПРОИЗВОДСТВА ЖЕМЧУГА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2339221C1 |
| БОРТОВОЕ ПОДЪЕМНОЕ УСТРОЙСТВО ПРЕИМУЩЕСТВЕННО ДЛЯ ТЯЖЕЛОГО ТРАНСПОРТНОГО САМОЛЕТА АН-124-100 | 1999 |
|
RU2154600C1 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА И ОПУСКАНИЯ ШАНДОРОВ В ОТВЕРСТИЯ ГИДРОТЕХНИЧЕСКИХ СООРУЖЕНИЙ | 1934 |
|
SU46192A1 |
| БОРТОВОЕ ПОДЪЕМНОЕ УСТРОЙСТВО ПРЕИМУЩЕСТВЕННО ДЛЯ ТЯЖЕЛОГО ТРАНСПОРТНОГО САМОЛЕТА АН-124-100 | 2000 |
|
RU2189349C2 |
Изобретение относится к средствам захвата, перемещения и установки крупногабаритных грузов, в частности, крупногабаритных объемных модулей и может быть использовано в области строительства. Портальный транспортер содержит опорные стойки (1), каждая из которых одним своим концом соединена с соответствующей колесной парой (2), имеющей привод и выполненной с возможностью вращения вокруг вертикальной оси в противоположных направлениях, а другим своим концом соединена с несущей рамой (4), имеющей две параллельные продольные несущие балки (5) и две поперечные балки (6). На несущих балках (5) установлены своими противоположными концами с возможностью перемещения вдоль них по меньшей мере три мостовых крана (8). На каждом мостовом кране (8) установлены лебедки (11), а также тележки (10), выполненные с возможностью перемещения вдоль мостового крана (8). Каждая лебедка (11) имеет трос, связанный с соответствующей тележкой (10) и соединенный с поворотным замком (12) для зацепления с грузом (9). Транспортер также содержит кабину (15) управления, блок питания и генераторную установку. Достигается обеспечение возможности быстрого, всенаправленного и высокоманевренного перемещения груза по неограниченной площади при одновременном повышении точности позиционирования груза с сохранением его качества за счет отсутствия перекосов при его транспортировке, позиционировании и установке. 6 з.п. ф-лы, 17 ил.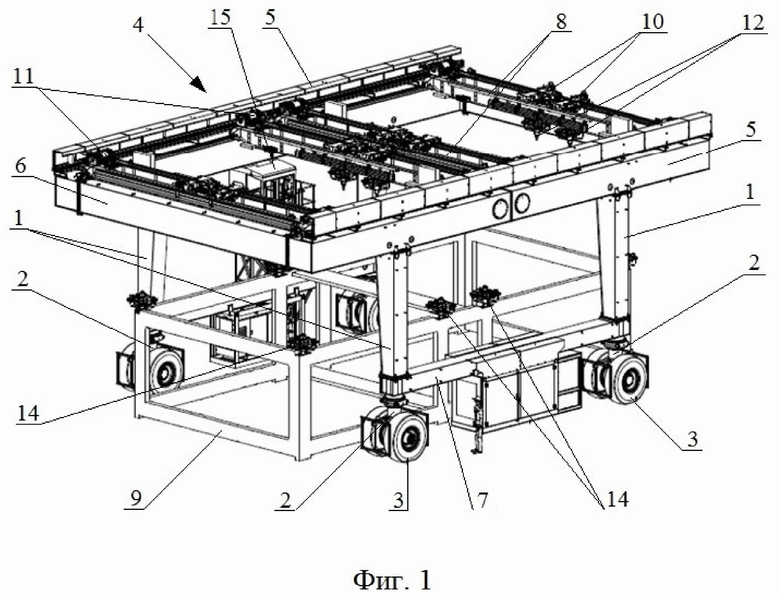
1. Портальный транспортер, содержащий опорные стойки, каждая из которых одним своим концом соединена с соответствующей колесной парой, имеющей привод и выполненной с возможностью вращения вокруг вертикальной оси в противоположных направлениях, а другим своим концом соединена с несущей рамой, имеющей две параллельные продольные несущие балки и две поперечные балки, на указанных несущих балках установлены своими противоположными концами с возможностью перемещения вдоль них по меньшей мере три мостовых крана, на каждом мостовом кране установлены лебедки, а также тележки, выполненные с возможностью перемещения вдоль мостового крана, каждая лебедка имеет трос, связанный с соответствующей тележкой и соединенный с поворотным замком для зацепления с грузом, транспортер также содержит кабину управления, блок питания и генераторную установку.
2. Транспортер по п.1, в котором на каждом мостовом кране установлено две лебедки, которые закреплены на противоположных концах мостового крана.
3. Транспортер по п.1, в котором на каждом мостовом кране установлено две тележки и две лебедки, при этом одна лебедка закреплена на одной тележке, а другая лебедка закреплена на другой тележке.
4. Транспортер по п.1, в котором в кабине управления размещена система управления, связанная с приводом каждой колесной пары, с каждым мостовым краном, с каждой лебедкой, с каждой тележкой и с каждым поворотным замком.
5. Транспортер по п.4, в котором он включает пульт дистанционного управления, связанный с системой управления.
6. Транспортер по п.1, в котором он включает датчики положения, тензодатчики, а также аварийные выключатели.
7. Транспортер по п.1, в котором каждый поворотный замок имеет привод и соединенный с ним пикообразный поворотный элемент, выполненный с возможностью зацепления с подъемной закладной груза.
| ПОРТАЛЬНЫЙ ПОГРУЗЧИК | 2010 |
|
RU2526019C2 |
| Электрический прибор для регистрации колебаний почвы | 1932 |
|
SU28669A1 |
| JP 2001130868 A, 15.05.2001 | |||
| Способ изготовления электрических катушек | 1983 |
|
SU1148052A1 |

