Данное изобретение относится к рабочей машине, снабженной усовершенствованными стабилизаторами.
Более конкретно, изобретение относится к стабилизаторам, которые дают оператору, находящемуся в кабине, возможность получить улучшенный обзор погрузочного устройства и самого груза.
Из уровня техники известны телескопические погрузчики, содержащие транспортное средство, снабженное шасси, перемещаемым на колесах, кабину водителя и рабочий рычаг, который может быть выдвинут телескопическим образом, причем кабина и рычаг установлены на шасси или на поворотной башне, установленной на шасси.
На наружном конце рычага находится устройство для подъема или перемещения грузов, такое как, например, вилка, клеть, блок для бокового перемещения, лебедка и т.д.
Для подъема и перемещения грузов на большие высоты и с большим «радиусом действия» необходимо стабилизировать транспортное средство, приподняв колеса над землей.
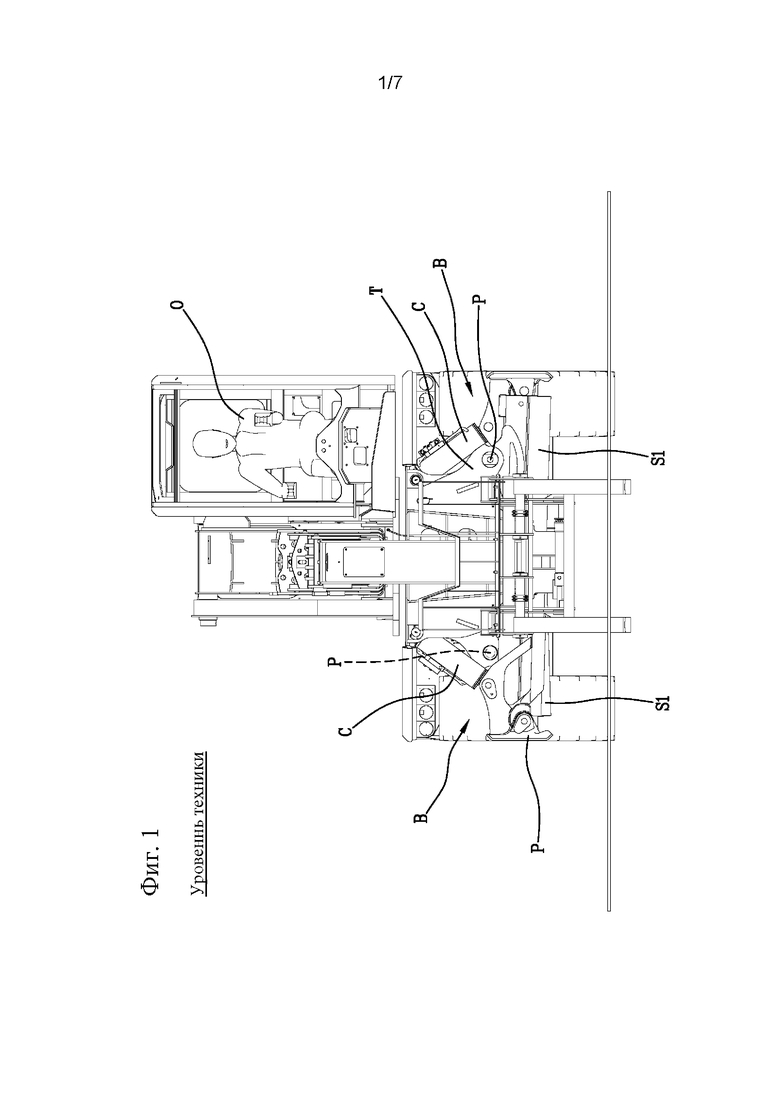
Из уровня техники известны стабилизаторы для телескопических погрузчиков так называемого «ножничного типа», состоящие из двух стабилизирующих блоков, расположенных в передней и задней частях транспортного средства и установленных на его шасси вблизи колес (см. фиг. 1, 2 и 3).
Каждый стабилизирующий блок содержит пару рычагов, выполненных с возможностью поворота и телескопического выдвижения, с одним или двумя элементами скольжения, которые имеют соответствующие наружные концы, предназначенные для опоры на землю посредством опорных оснований, и внутренние концы, шарнирно присоединенные к несущей раме Т.
На практике стабилизирующие рычаги В расположены перекрестным образом относительно друг друга и во время подъема перемещаются подобно паре ножниц.
После завершения работ по перемещению грузов стабилизаторы перемещаются в нерабочее расположение (показанное на фиг. 1 и 2), в котором они имеют минимальные габаритные размеры, с обеспечением тем самым опускания машины до тех пор, пока колеса не будут опираться на землю.
Как указано выше, данные ножничные стабилизаторы содержат соответствующую раму Т, или несущую конструкцию, которая является частью шасси телескопического погрузчика и к которой шарнирно присоединены рычаги В и гидравлические цилиндры С, инициирующие подъем и опускание рычагов В, при этом для выдвижения и втягивания рычагов используются дополнительные цилиндры.
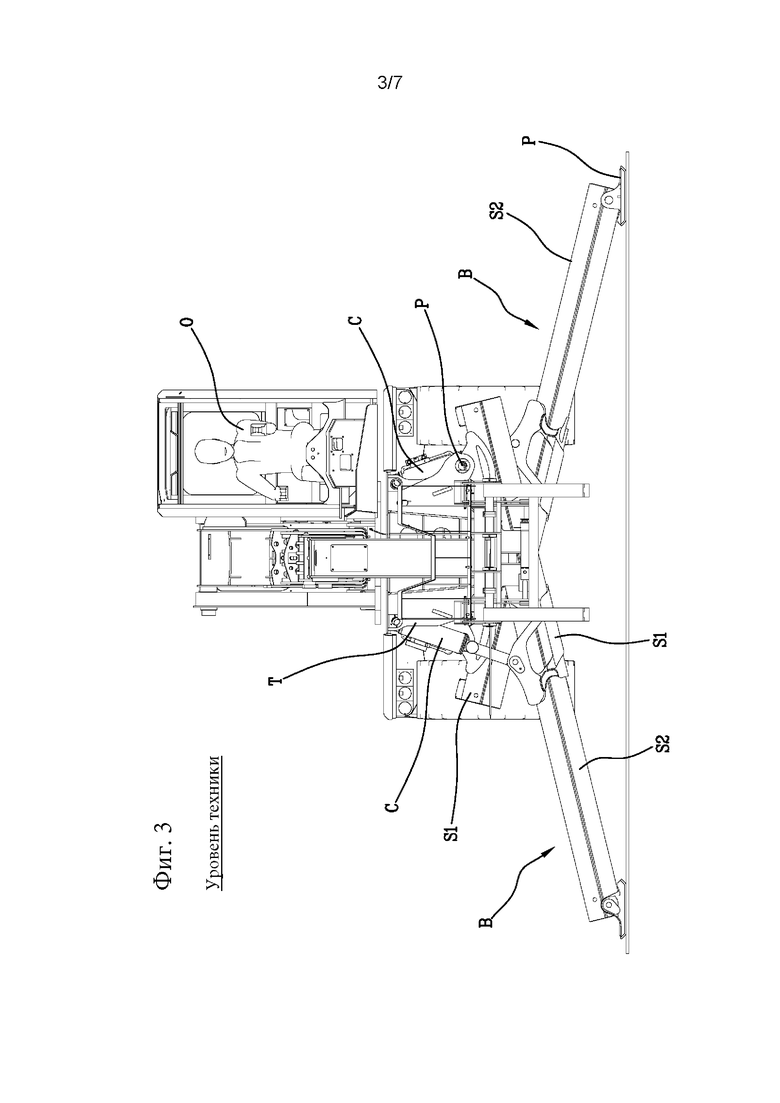
На практике каждый рычаг В шарнирно соединен с указанной несущей рамой при помощи штифта Р, расположенного на верхней стороне его первой части S1, в которую вставлен с возможностью скольжения «элемент скольжения» или вторая часть S2 (см. фиг. 3), а также шарнирно соединен с одним концом цилиндра С при помощи другого штифта, также расположенного на верхней стороне первой части S1, но на большем расстоянии от свободного конца последней по сравнению с первым штифтом Р.
Другими словами, каждый рычаг В в верхней части с возможностью поворота присоединен к раме Тик силовому цилиндру С, который опускает или поднимает его, в отдельных и разнесенных местоположениях на одной и той же верхней стороне его первой части S1.
Данная конфигурация, несомненно, является эффективной и в течение нескольких лет представляла стандарт в данной отрасли, так что можно сказать, что в настоящее время она является единственным известным способом изготовления ножничных стабилизаторов для телескопических погрузчиков.
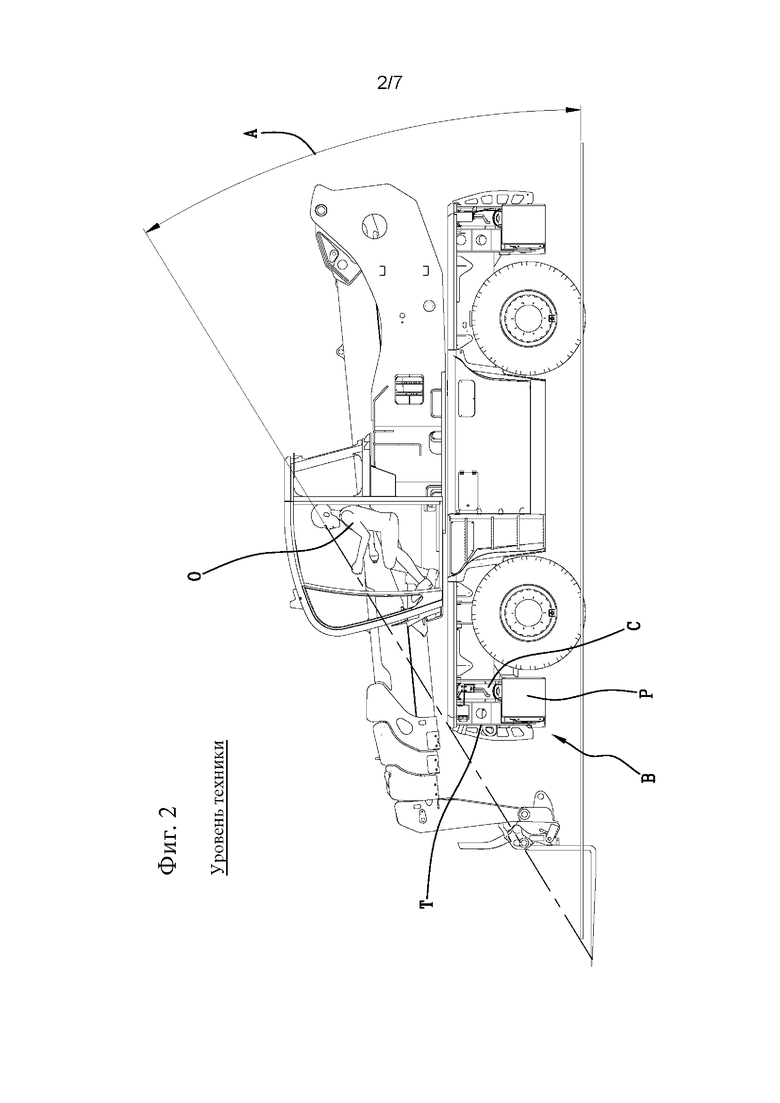
Поскольку передний стабилизирующий блок известного типа создает преграду, расположенную непосредственно перед шасси транспортного средства, он становится помехой для обзора оператором О, который пытается следить за устройством или грузом, когда они находятся весьма близко к земле перед машиной (см. фиг. 2).
Например, это ограничение весьма сильно ощущается, когда оператору О необходимо расположить вилки под поддоном, который переносит груз, находящийся на земле, или когда груз необходимо разместить на земле, соответственно, при нахождении рычага в сильно опущенном состоянии.
Другими словами, угол А максимального обзора, образованный направлением взгляда оператора О относительно земли, определяемым ближайшей точкой на земле, которую может наблюдать оператор в кабине, является слишком ограниченным для достижения максимальной эффективности использования машины.
Соответственно, на рынке давно существует необходимость в улучшении обзора груза и устройства, когда они находятся близко к земле.
Техническая задача, лежащая в основе данного изобретения, заключается в создании телескопического погрузчика, снабженного стабилизаторами, которые обеспечивают удовлетворение вышеуказанной потребности.
Указанная цель достигается с помощью изобретения, выполненного в соответствии с п. 1 формулы изобретения.
Другие особенности и преимущества данного изобретения станут более очевидны из неограничивающего описания предпочтительного, но не исключительного варианта выполнения предложенного телескопического погрузчика, показанного на прилагаемых чертежах, на которых:
фиг. 1 изображает вид спереди известного телескопического погрузчика с втянутыми и поднятыми стабилизаторами,
фиг. 2 изображает вид сбоку телескопического погрузчика, показанного на фиг. 1,
фиг. 3 изображает вид спереди телескопического погрузчика, показанного на предыдущих чертежах, с выдвинутыми стабилизаторами,
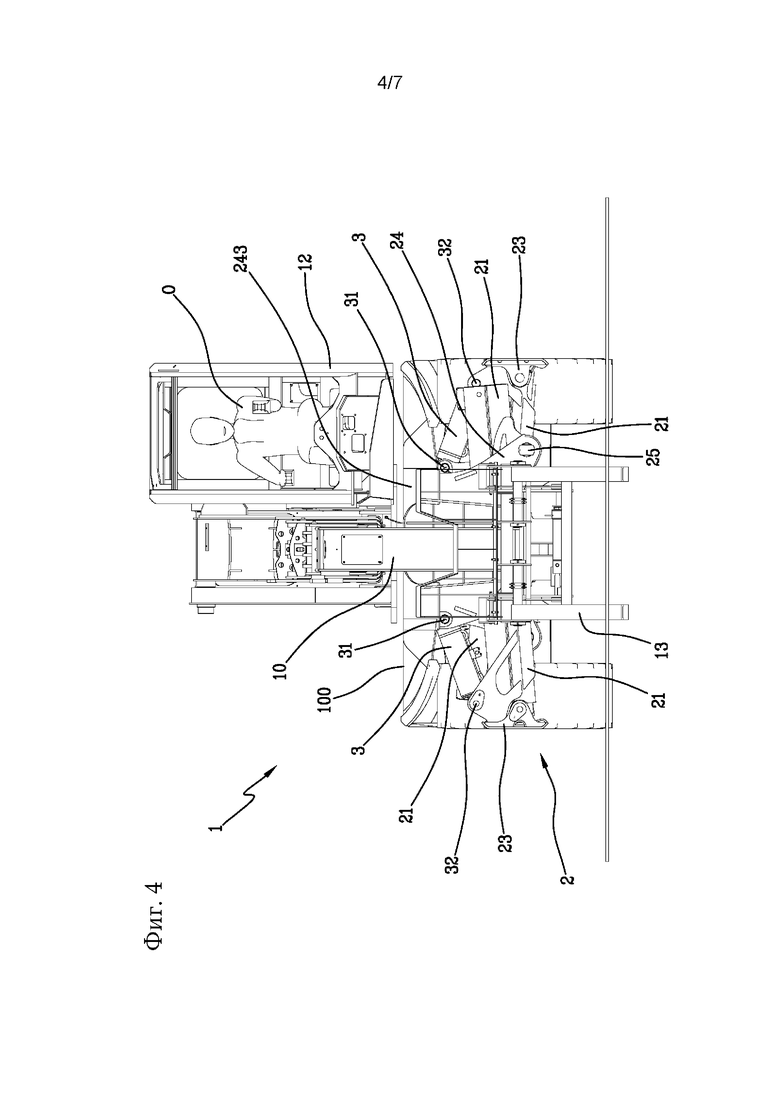
фиг. 4 изображает вид спереди телескопического погрузчика согласно изобретению с втянутыми и поднятыми стабилизаторами,
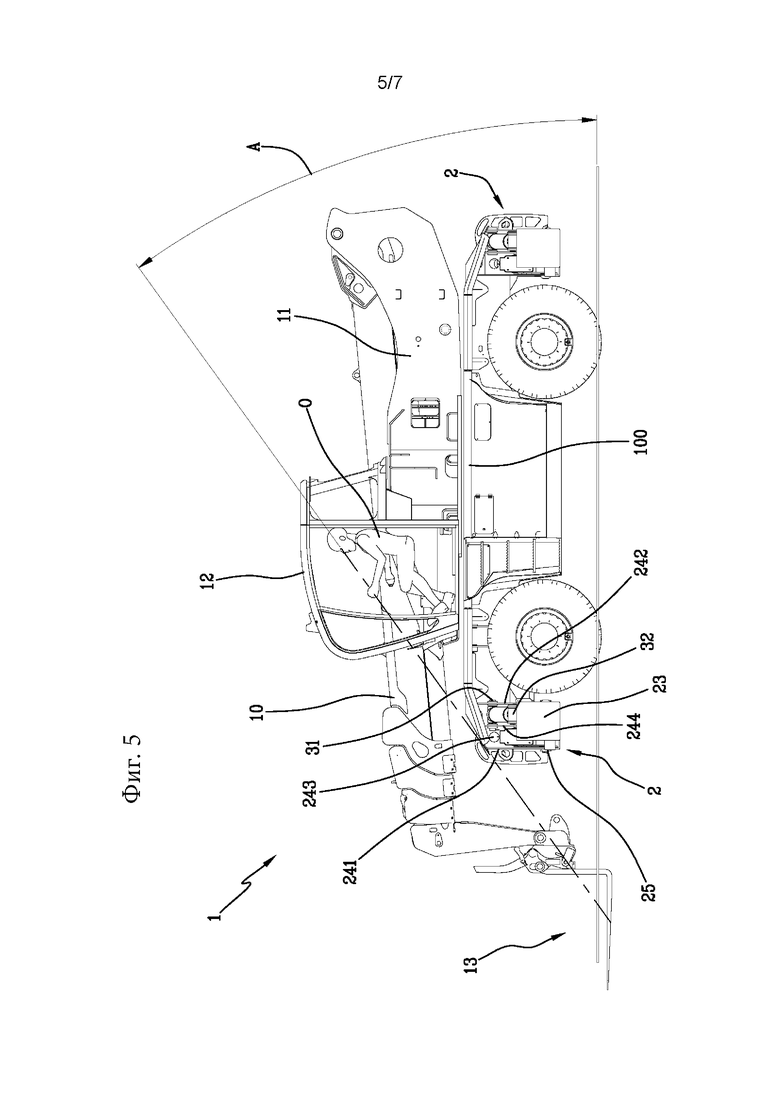
фиг. 5 изображает вид сбоку телескопического погрузчика, показанного на фиг. 4,
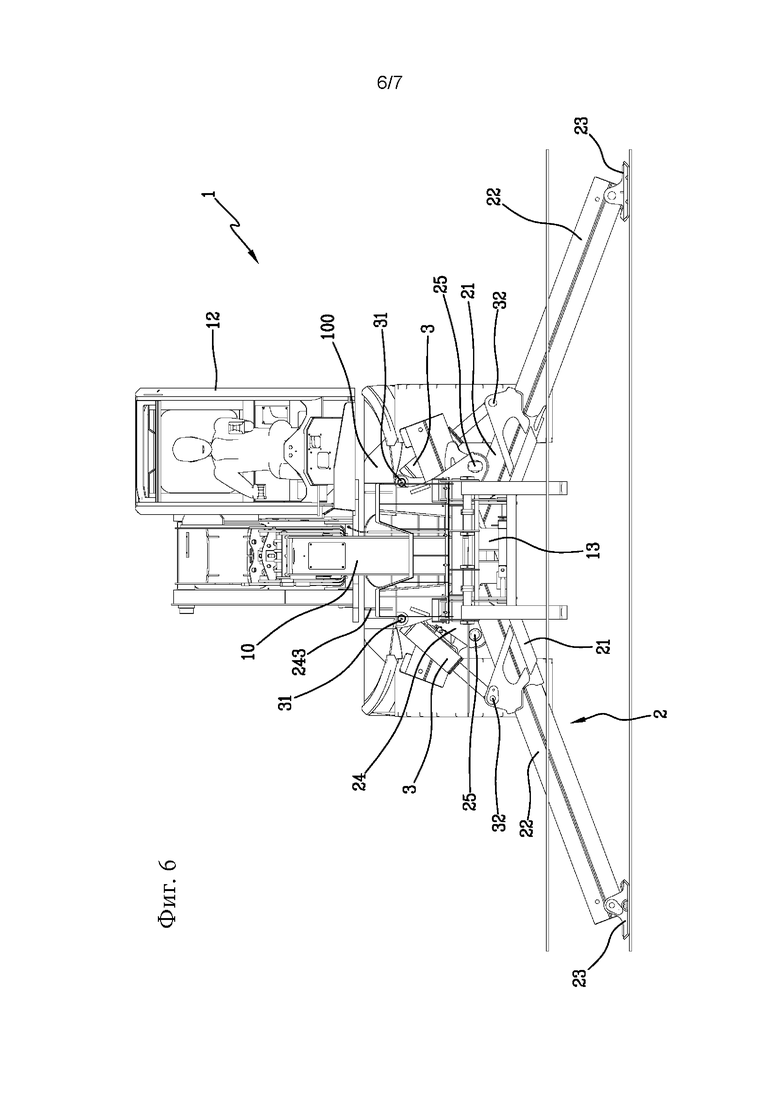
фиг. 6 изображает вид спереди телескопического погрузчика, показанного на двух предыдущих чертежах, с выдвинутыми стабилизаторами, и
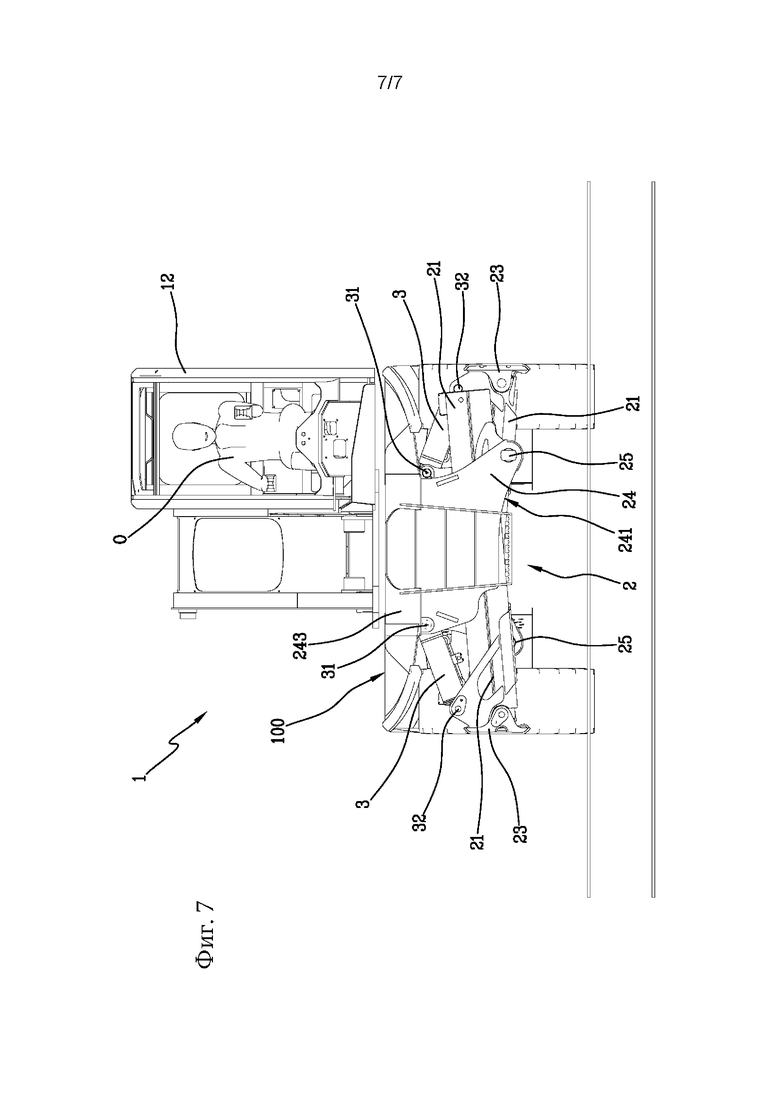
фиг. 7 изображает вид спереди телескопического погрузчика согласно изобретению с втянутыми стабилизаторами, при этом рабочий рычаг не показан.
На прилагаемых чертежах номером 1 позиции обозначена в целом самоходная рабочая машина, выполненная в соответствии с изобретением.
Машина 1, показанная на чертежах, представляет собой поворотный телескопический погрузчик, который содержит шасси 100, перемещаемое на колесах, и телескопический подъемный рычаг 10, установленный на поворотной платформе 11, расположенной на шасси, которое перемещается на колесах и на котором также размещена кабина 12 водителя.
Кроме того, на наружном конце рычага 10 установлено погрузочное устройство 13.
Однако изобретение может использоваться с рабочей машиной другого типа, в целом снабженной подвижными компонентами, которые в любом случае содержат подъемный рычаг и устройство, такое как, например, телескопический погрузчик жесткого или шарнирного типа.
Термин «устройство» 13 относится как ко вспомогательному средству для взаимодействия с грузом, например вилке, блоку для бокового перемещения, лебедке, захватному устройству и т.д., так и ко вспомогательному средству для подъема персонала и, возможно, также груза, такому как клеть.
Более подробно, рычаг 10 может быть снабжен крепежным приспособлением, которое также относится к типу, обычно используемому в телескопических погрузчиках, изготавливаемых заявителем, и обеспечивает возможность замены устройства 13 и его присоединения к гидравлическим и электронным устройствам машины 1.
Ниже в данном документе для упрощения описания сделана ссылка на конкретный, но неограничивающий случай, в котором машина 1 согласно данному изобретению представляет собой телескопический погрузчик.
Рычаг 10 предложенного телескопического погрузчика 1 шарнирно соединен с поворотной платформой 11 с возможностью совершения колебаний в вертикальном направлении под действием гидравлического цилиндра, и, кроме того, рычаг 10 выполнен с возможностью выдвижения и втягивания под действием одного или более дополнительных цилиндров и, более конкретно, содержит части, вставленные одна в другую, коаксиальные относительно друг друга и предназначенные для перемещения вдоль осевого направления.
Телескопический погрузчик 1 содержит стабилизаторы 2, предназначенные для установки на транспортном средстве 1 и снабженные стабилизирующими рычагами 21, 22, 23.
Стабилизаторы, предусмотренные в установке согласно данному изобретению, относятся к так называемому «ножничному» типу или «Х»-типу и содержат два стабилизирующих блока 2, расположенных в передней и задней частях шасси 100 вблизи колес.
Более конкретно, каждый стабилизирующий блок 2 содержит два телескопических стабилизирующих рычага 21, 22, 23 и несущую раму 24, которая скреплена или объединена с шасси 100 и к которой по отдельности шарнирно присоединены рычаги 21, 22, 23 в перекрестной конфигурации с обеспечением возможности их перемещения с поворотом в противоположных направлениях подобно паре ножниц.
На практике рама 24 предпочтительно является неотъемлемой частью шасси 100, а стабилизирующие рычаги присоединены непосредственно к шасси, однако не исключен случай, при котором несущая рама прикреплена к шасси болтами вместо присоединения с помощью сварки.
Более подробно, два рычага 21, 22, 23, присоединенные к одной и той же раме 24, установлены один перед другим с обеспечением их перемещения в параллельных плоскостях, в целом по вертикали.
Стабилизаторы предложенной установки выполнены с обеспечением перехода из выдвинутых рабочих конфигураций, при которых они обеспечивают стабилизацию машины, поднимая колеса над землей, в исходную втянутую конфигурацию, при которой колеса возвращаются на землю, и наоборот.
На практике стабилизирующие рычаги 21, 22, 23 выполнены с возможностью перемещения между поднятым положением, при котором они отнесены на расстояние от земли (см. фиг. 4, 5 и 7) и, в частности, обеспечивают возможность свободного управления транспортным средством 1, и опущенными рабочими положениями (таким как показанное на фиг.6), при которых они опираются на землю.
Рычаги 21, 22, 23 содержат первую часть 21, или «втулку», которая является полой и в которой расположена с возможностью скольжения вторая часть 22, или «элемент скольжения», снабженная у ее наружного конца опорным элементом, то есть основанием 23.
На практике каждая часть 21, 22 может содержать прямолинейную полую штангу, которая выполнена полой и имеет четырехугольное поперечное сечение.
В данном случае штанга второй части 22 вставлена с возможностью скольжения в штангу первой части 21, которая, очевидно, имеет большее поперечное сечение.
Более подробно, первая часть 21 шарнирно присоединена к концу первого линейного исполнительно средства 3, предназначенного для поворота первой части 21 вокруг первого штифта 25 для обеспечения возможности опускания или подъема соответствующего стабилизирующего рычага 21, 22, 23.
Первое исполнительное средство предпочтительно представляет собой гидравлический цилиндр 3.
Более подробно, первая часть 21 каждого рычага 21, 22, 23 присоединена к несущей раме 24 с помощью первого шарнира 25.
На практике для перемещения рычага 21, 22, 23 вокруг первого шарнира 25 используется указанный первый гидравлический цилиндр 3, осевое усилие которого также используется для подъема на этапе стабилизации.
Каждый первый цилиндр 3 присоединен с помощью второго шарнира 31 к несущей конструкции 24 и с помощью третьего шарнира 32 - к первой части 21 соответствующего рычага 21, 22, 23.
Первый и третий шарниры 25, 32 размещены в двух различных местоположениях по длине первой части 21, причем первый шарнир расположен дальше во внутреннем направлении, то есть ближе к внутреннему концу первой части 21, а третий шарнир расположен дальше в наружном направлении, то есть ближе к наружному концу.
На практике гидравлические цилиндры 3 одного и того же стабилизирующего блока 2 приводятся в действие с созданием толкающего усилия для обеспечения перемещения рычагов 21, 22, 23 к земле и поднятия транспортного средства 1, и приводятся в действие с созданием втягивающего усилия, когда транспортное средство 1 возвращается в состояние опоры на колеса и рычаги 21, 22, 23 поднимаются в исходное положение.
Предпочтительно в исходной конфигурации первые исполнительные средства 3 расположены с наклоном относительно плоскости, параллельной земле.
Более конкретно, в исходной конфигурации, при которой рычаги 21, 22, 23 полностью подняты, оба первых гидравлических цилиндра 3 (или, в любом случае, первые исполнительные средства) расположены с наклоном, т.е. под углом, относительно идеальной плоскости, параллельной земле и, следовательно, горизонтальной, если земля является горизонтальной.
Изобретение содержит вторые исполнительные средства, например, содержащие гидравлические цилиндры (не показаны), предназначенные для перемещения по отдельности вторых частей 22 между полностью закрытым положением и выдвинутыми положениями.
Более конкретно, для выдвижения элемента 22 скольжения наружу из втулки 21 каждого рычага 21, 22, 23 используется гидравлический цилиндр, вставленный между элементом 22 и втулкой 21 и присоединенный к ним на противоположных концах.
В соответствии с важным аспектом изобретения, как показано на фиг.4-7, первая часть 21 каждого рычага 21, 22, 23 шарнирно присоединена к несущей раме 24 с помощью первого штифта 25, расположенного на нижней стороне первой части 21.
Другими словами, первая часть 21 поворачивается вокруг оси, расположенной под ее нижней стороной или, в любом случае, у ее нижней стороны, то есть точно с противоположной стороны по сравнению с известным уровнем техники.
В случае жестких телескопических погрузчиков эта особенность применима по меньшей мере к паре рычагов 21, 22, 23 переднего блока, тогда как для поворотных телескопических погрузчиков 1, как показано на чертежах, «перевернутое» расположение оси поворота первой части 21 предпочтительно имеет место как в переднем, так и в заднем блоке.
Очевидно, что при использовании в данном описании таких слов, как «верхний» или «нижний» или других выражений, касающихся направления, они относятся к нормальным условиям использования телескопического погрузчика 1.
Несущая рама 24 содержит по меньшей мере две основные пластины 241, 241, при этом наружная пластина и внутренняя пластина обращены к шасси 100, расположены параллельно друг другу и в целом являются вертикальными, и между ними расположены первые части 21 и предпочтительно также первые исполнительные средства 25 стабилизирующего блока 2.
Благодаря своей особой конфигурации стабилизирующий блок 2 согласно изобретению не является слишком высоким, вследствие чего обзор устройства 13 или груза вблизи земли оператором О, находящимся в кабине 12, менее затруднен, чем в известном уровне техники.
Это очевидно из показанного на фиг.5, из которой следует, что оператор О, находящийся в кабине 12 телескопического погрузчика 1 согласно изобретению, может лучше видеть устройство 13 по сравнению с известными машинами (т.е. по сравнению с тем, что показано на фиг. 2, относящейся к уровню техники) и что максимальный угол обзора А* превышает угол обзора в уровне техники.
Поскольку шарнир первого штифта 25 расположен под первой частью 21, относительное положение рычагов 21, 22, 23 является поднятым по сравнению с их положением в уровне техники, вследствие чего стабилизирующий блок 2 является более компактным по высоте, так что при закрытой конфигурации стабилизаторов 2 первые гидравлические цилиндры 3 согласно изобретению образуют с рычагами 21, 22, 23 меньший угол, чем угол, образуемый цилиндрами известного уровня техники (ср. фиг. 1 и 4 или 7).
Более подробно, в исходной конфигурации стабилизаторов 2 цилиндры 3 образуют с вышеуказанной плоскостью, параллельной земле, угол более 0°, но менее 35°, предпочтительно данный угол по существу равен 20°.
Кроме того, в исходной конфигурации, то есть в полностью поднятой конфигурации, рычаги 21, 22, 23 расположены перекрестным образом относительно друг друга.
Таким образом, при одной и той же ширине стабилизаторов 2 в боковом направлении в исходной конфигурации при их полном подъеме и полном втягивании (т.е. в боковом направлении относительно продольной оси машины 1) имеется возможность установки более длинных рычагов 21, 22, 23 по сравнению с уровнем техники, в частности, в отношении первых частей 21.
В соответствии с данной конфигурацией предпочтительно рама 24 имеет верхнюю сторону 243, или «крышу», наклонную относительно центральной оси шасси 100 и проходящую с наклоном вниз в переднем направлении.
Эта наклонная сторона, которая может быть задана пластиной 23, соединяет верхнюю часть двух основных пластин 241, 242, смещенных относительно друг друга в том смысле, что верхняя часть или верхняя кромка наружной пластины 241 расположена ниже, чем верхняя часть или кромка внутренней пластины 242.
Также может быть предусмотрена третья центральная пластина 244, расположенная между первой и второй пластинами 241, 242 и разделяющая рабочие пространства двух стабилизирующих рычагов 21, 22, 23, к которым она присоединена в местах размещения соответствующих штифтов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Моделирующее устройство для телескопических погрузчиков | 2021 |
|
RU2831614C2 |
| Телескопический погрузчик с усовершенствованными стабилизаторами | 2020 |
|
RU2815179C2 |
| ПОГРУЗОЧНАЯ МАШИНА | 1991 |
|
RU2006453C1 |
| УСТРОЙСТВО ДЛЯ УДЕРЖАНИЯ ИНСТРУМЕНТА САМОХОДНОЙ РАБОЧЕЙ МАШИНЫ И ПРИСПОСОБЛЕНИЕ С ИНСТРУМЕНТОМ ДЛЯ САМОХОДНОЙ РАБОЧЕЙ МАШИНЫ | 2020 |
|
RU2787523C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ МАШИНА, СОДЕРЖАЩАЯ УСОВЕРШЕНСТВОВАННОЕ СЦЕПНОЕ УСТРОЙСТВО | 2006 |
|
RU2412572C2 |
| ПОГРУЗЧИК | 2002 |
|
RU2230698C2 |
| САМОХОДНЫЙ ПОДЪЕМНЫЙ КРАН И СПОСОБ ОБЕСПЕЧЕНИЯ ЕГО РАБОТЫ | 2008 |
|
RU2467946C2 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ОПОВЕЩЕНИЯ | 2016 |
|
RU2720541C2 |
| Самопогрузчик | 1980 |
|
SU865205A1 |
| САМОСВАЛЬНАЯ РАЗГРУЗКА ВОЗА СОРТИМЕНТОВ | 2020 |
|
RU2752425C1 |
Изобретение относится к стабилизаторам для самоходных машин. Самоходная рабочая машина (1) снабжена стабилизаторами, которые содержат передний стабилизирующий блок (2), установленный на шасси (100) машины (1), перемещаемом на колесах и оборудованном кабиной (12) для оператора (О). Стабилизирующий блок (2) содержит несущую раму (24) и два стабилизирующих рычага (21, 22, 23), каждый из которых содержит первую часть (21), шарнирно соединенную с рамой (24) при помощи штифта (25), расположенного на нижней стороне первой части (21). Достигается улучшение обзора груза и устройства, когда они находятся близко к земле. 7 з.п. ф-лы, 7 ил.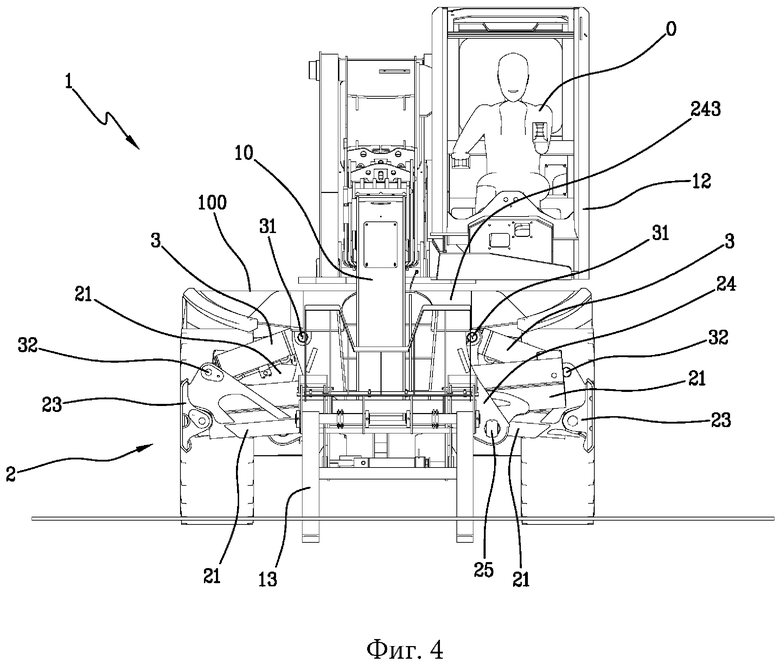
1. Самоходная рабочая машина (1), в частности телескопический погрузчик, снабженная стабилизаторами, которые содержат по меньшей мере передний стабилизирующий блок (2), установленный на шасси (100) указанной машины (1), перемещаемом на колесах и оборудованном кабиной (12) для оператора (О), причем указанный стабилизирующий блок (2) содержит несущую раму (24) и два стабилизирующих рычага (21, 22, 23), каждый из которых содержит первую часть (21), шарнирно соединенную с указанной рамой (24) при помощи первого штифта (25), расположенного на нижней стороне указанной первой части (21),
при этом указанная первая часть (21) также шарнирно присоединена к концу первого линейного исполнительно средства (3), предназначенного для поворота первой части (21) вокруг первого штифта (25) с обеспечением возможности опускания или подъема соответствующего стабилизирующего рычага (21, 22, 23),
каждое первое исполнительное средство (3) присоединено с помощью второго шарнира (31) к указанной несущей раме (24) и присоединено с помощью третьего шарнира (32) к первой части (21) соответствующего рычага (21, 22, 23),
первый и третий шарниры (25, 32) размещены в двух различных местоположениях по длине первой части (21), причем первый шарнир расположен ближе к внутреннему концу первой части (21), а третий шарнир расположен ближе к ее наружному концу,
при этом стабилизирующие рычаги (21, 22, 23) выполнены с возможностью перемещения между поднятым положением, при котором они отнесены на расстояние от земли, и опущенными рабочими положениями, при которых они опираются на землю,
отличающаяся тем, что при нахождении стабилизирующих рычагов (21, 22, 23) в поднятом положении первые исполнительные средства (3) расположены наклонно относительно плоскости, параллельной земле, так что они образуют с указанной плоскостью угол более 0°, но менее 35°.
2. Самоходная рабочая машина (1) по п.1, в которой каждый рычаг (21, 22, 23) содержит вторую часть (22), вставленную в первую часть (21) с возможностью скольжения и приводимую в действие с помощью второго исполнительного средства для обеспечения возможности выдвижения и втягивания рычага (21, 22, 23).
3. Самоходная рабочая машина (1) по любому из предыдущих пунктов, в которой стабилизаторы представляют собой стабилизаторы ножничного типа, а стабилизирующий блок (2) содержит два рычага (21, 22, 23), выполненных с возможностью перемещения в параллельных плоскостях.
4. Самоходная рабочая машина (1) по п.1, в которой указанный угол по существу равен 20°.
5. Самоходная рабочая машина (1) по п.1, в которой рычаги (21, 22, 23) в исходной конфигурации расположены перекрестным образом относительно друг друга.
6. Самоходная рабочая машина (1) по любому из предыдущих пунктов, в которой указанная рама (24) имеет верхнюю сторону (243), наклонную относительно центральной оси шасси (100) машины (1) и проходящую с наклоном вниз в переднем направлении.
7. Самоходная рабочая машина (1) по любому из предыдущих пунктов, в которой указанная рама (24) содержит по меньшей мере две параллельные основные пластины (241, 242), между которыми расположены указанные первые части (21).
8. Самоходная рабочая машина (1) по п.6 или 7, в которой указанная верхняя сторона (243) соединяет верхние части указанных основных пластин (241, 242).
| JP S55179956 U, 24.12.1980 | |||
| EP 3363765 A1, 22.08.2018 | |||
| Устройство для решения интегральных уравнений Вольтерра второго рода с ядром типа К (X - t) | 1957 |
|
SU118626A1 |
| Долото для вращательного бурения скважин | 1926 |
|
SU7925A1 |

