Технические области применения
Изобретение относится к методам и устройствам, обеспечивающим транспортировку объекта потоком несущей среды. Оно охватывает широкий класс различных систем, применяемых, например: в индустрии; в энергетически-связанных системах; в трубопроводном, наземном, воздушном, надводном, подводном и других видах транспорта; в медицинской и бытовой технике; в преобразовательной и специальной технике; в специальной разрушающей и взрывной технике; в исследовательских устройствах и системах; в физиологических системах и в ряде других областей. В настоящее время, рассматриваемый широкий класс подобных систем представляет собой одну из актуальных развивающихся областей в мире, характеризующуюся существенным энергопотреблением.
История вопроса
Известны различные методы и устройства, обеспечивающие транспортировку объекта потоком несущей среды. Общим традиционным методологическим подходом, используемым в различных системах указанного класса, является приложение воздействия к указанной несущей среде от средства воздействия, создающего в процессе преобразования подводимой к нему энергии интегрально постоянное во времени указанное воздействие так, чтобы создаваемый при этом указанный поток несущей среды воздействовал на указанный объект для обеспечения процесса его транспортировки в заданном направлении. Указанный подход реализуется в известных системах, использующих, в основном, два вида средств воздействия: средство перепада давления (насосы и помпы; винтовые турбинные, турбореактивные и реактивные системы; взрывные устройства напорного или вакуумного воздействия; средства воздействия, использующие принудительное аэродинамическое или гидродинамическое взаимодействие объекта или его конструктивной части, соответственно, с газообразной или жидкой средой, например, участок внешней поверхности корпуса летательного, скоростного наземного или подводного движущегося аппарата; и т.п.) и средство прямого энергетического воздействия (МГД и ЭГД-насосы; магнитные и электромагнитные ускорительные системы; и т.п.). При этом указанный объект может быть конструктивно не связан или конструктивно связан (например, в летательном аппарате) с указанным средством воздействия. В ряде случаев, указанный объект, являясь текучей средой, выполняет функцию указанной несущей среды (например, транспортируемые по трубопроводу газ или жидкий продукт - нефть). В различных известных средствах воздействия, в качестве подводимой к ним и преобразуемой в них энергии, используются различные виды энергии, например: электрическая, электромагнитная, магнитная, механическая, тепловая; энергия выделяемая, например, в результате осуществления, соответственно: химической реакции, ядерной реакции, лазерного воздействия и т.п.; или, например, энергия, выделяемая при работе физиологической системы; или энергия, выделяемая при принудительном гидродинамическом воздействии объекта с жидкостной средой. В ряде известных средств воздействия, в качестве указанной подводимой энергии, используется совокупность нескольких различных видов энергии (например, совокупность магнитной и электрической энергии, как в МГД и ЭГД-насосах). В качестве несущей среды, в основном, используется текучая (газообразная или жидкостная) среда. Объектом транспортировки может являться, например: порошковый или гранулированный материал; газообразная или жидкостная среда; полезные ископаемые (уголь, руда, нефть, газ, гравий и т.п.); смесь материалов или сред; компоненты или отходы производства; скоростной или неподвижный объект, физиологическая или физическая субстанция; и многое другое.
Общими недостатками известного традиционного методологического подхода, реализуемого в подобных системах для обеспечения процесса транспортировки объекта потоком несущей среды, являются:
- ограниченные возможности в снижении удельного расхода энергии на обеспечение указанного процесса транспортировки указанного объекта;
- невозможность осуществления эффективного динамического управления указанным процессом транспортировки с целью оптимизации его энергетических характеристик;
- наличие негативных побочных эффектов, сопровождающих работу ряда побочных систем и существенно ухудшающих их эксплуатационные, а также энергетические характеристики (например, "залипание" в процессе всасывания; адгезия частиц на внутренних стенках или закупорка участка канала, ограничивающих транспортируемый поток; быстрая забивка фильтрующих устройств, работающих в многофазном потоке, и т.п.).
Перечисленные выше недостатки, существенно снижают энергетическую, а значит и экономическую эффективность применения подобных традиционных систем для обеспечения процесса транспортировки объекта потоком несущей среды.
В то е время, известны другие методы динамической транспортировки объекта потоком несущей среды, описанные, например, в Патентах США №№5201877 (1993); 5593252 (1997) и 5865568 (1999) - А.Релин и др. Указанные методы и устройства реализуют методологический подход, впервые предложенный доктором А.Релиным в 1990 году и использующий негативное модулирование всасывающей силы, осуществляемое вне указанного средства воздействия путем связывания внутренней полости всасывающего участка линии транспортировки с атмосферой через проходной канал и одновременного периодического изменения площади и формы проходного канала в ходе транспортировки объекта. Использование указанного подхода (названного доктором А.Релиным "АМ-метод"), реализующего "Принцип управляемого внешнего динамического шунтирования" всасывающего участка, предложенного автором, открывает качественно новые возможности для существенного повышения эффективности работы и эксплуатации определенного класса устройств и систем всасывающей транспортировки различных объектов. В частности, применение негативного модулирования всасывающей силы на ограниченном всасывающем участке движения потока в закрытом канале, например: в пылесосных системах, в различных медицинских всасывающих инструментах, а также в пневмотранспортных системах транспортировки различных материалов и объектов, позволяет минимизировать или даже полностью устранить перечисленные выше общие недостатки, присущие известному традиционному подходу, реализуемому в известных системах подобного типа.
Однако необходимость и возможность осуществления связывания внутренней полости только всасывающего участка линии транспортировки (вне указанного средства воздействия) с атмосферой через проходной канал не позволяет применять указанный принцип модуляции в достаточно широком классе других известных устройств и систем, обеспечивающих процесс транспортировки объекта потоком несущей среды:
- не допускающих контакта с атмосферной средой транспортируемого в закрытом канале объекта, например: различных газов, химических и физиологических материалов и сред;
- не допускающих попадания атмосферной среды (например, воздуха) в гидротранспортную систему, приводящего к пагубным для трубопровода и гидронасоса кавитационным эффектам, а также - к увеличению потерь энергии в указанном процессе транспортировки объекта потоком несущей среды;
- не допускающих возможность осуществления связывния внутренней полости напорной линии транспортировки с атмосферой через проходной канал, предопределяющего выброс в атмосферу транспортируемой среды;
- предусматривающих необходимость обеспечения одинаковых скоростных характеристик на всем протяжении движущегося потока: как на его всасывающем, так и на напорном участках;
- не допускающих возможность реализации подобного подхода, в силу отсутствия в них закрытого протяженного всасывающего участка канала, при использовании различных типов указанных выше средств воздействия на несущую среду перепадом давления, например: связанных с объектом транспортировки - винтовых турбин, турбореактивных и реактивных систем; различных взрывных устройств; средств воздействия, использующих принудительно аэродинамическое или гидродинамическое взаимодействие объекта соответственно с газообразной или жидкой средой; и других подобных типов средств воздействия;
- не предусматривающих создания перепада давления применяемым в них средством воздействия, реализующим иные принципы осуществления указанного воздействия, например, при использовании указанных выше средств прямого энергетического воздействия.
Кроме того, при разработке конструкции модулятора, реализующего указанный "Принцип управляемого внешнего динамического шунтирования" всасывающего участка, приходится решать дополнительные проблемы, например: снижение уровня дополнительного шумового эффекта, возникающего при периодическом связывании атмосферной среды с внутренней полостью всасывающего участка линии транспортировки; а также - защита проходного канала связывания модулятора от возможного засасывания в него различных компонентов внешней среды или посторонних предметов.
Учет указанных факторов, в подобных случаях, дополнительно усложняет и делает более дорогой конструкцию, а также эксплуатацию используемого модулятора.
Приведенные выше недостатки существенно ограничивают возможности решения актуальных задач, связанных с энергетической оптимизацией процессов транспортировки объекта потоком несущей среды, а также - области применения рассмотренного эффективного методологического подхода, использующего негативное модулирование всасывающей силы на всасывающем участке, осуществляемое с использованием указанного "Принципа управляемого внешнего динамического шунтирования".
В то же время, известны другие методы и устройства для динамической транспортировки объекта потоком несущей среды, описанные, например, в Патенте США №6827528 (2004) - А.Релин. Принципиально новый метод (названный автором "Р-метод") базируется на разработанных доктором А.Релиным и подтвержденных научными исследованиями концепций новой теории "Модуляционная аэро- и гидродинамика процессов транспортировки объектов потоком несущей среды". Указанные научные концепции учитывают установленные автором новые закономерности, связанные с существенным снижением комплекса различных известных составляющих потерь энергии (а значит и удельного расхода энергии) при создании динамического управляемого процесса движения потока несущей среды с заданным динамическим периодически изменяемым знакопеременным ускорением в ходе обеспечения процесса транспортировки указанного объекта.
Указанный динамический метод минимизирует либо полностью устраняет описанные выше недостатки в обеспечении эффективного процесса транспортировки объекта потоком несущей среды, присущие известному традиционному методологическому подходу и рассмотренному выше другому подходу, использующему негативное модулирование всасывающей силы, основанное на "Принципе управляемого внешнего динамического шунтирования" всасывающего участка. Высокая энергетическая эффективность указанного динамического метода достигается за счет решения им ряда основных проблем:
- обеспечение минимизации негативного доминирующего влияния турбулентности на потери кинетической составляющей приложенной энергии в зоне пограничного слоя и в ядре потока несущей среды при обеспечении им процесса транспортировки объекта;
- обеспечение минимизации различных составляющих потерь энергии, связанных с процессом транспортировки самого объекта потоком несущей среды в течение всего периода указанного процесса;
- обеспечение возможности заданного многопараметрического динамического управления процессом транспортировки потоком несущей среды в течение всей его реализации;
- обеспечение возможности существенного снижения интегральной величины энергии, прилагаемой к указанному потоку энергетического воздействия и, как следствие этого, - обеспечение существенного уменьшения потребления подводимой энергии, преобразуемой (потребляемой) средством воздействия на поток;
- обеспечение возможности динамического учета характеристик (критериев) процесса транспортировки объекта потоком несущей среды для оптимизации заданного многопараметрического динамического управления обеспечением указанного процесса с целью повышения его энергетической эффективности.
Метод динамической транспортировки объекта потоком несущей среды включает следующие ступени.
В конвейере, содержащем циклическое приводное средство транспортировки текучей среды, имеющей, как минимум, один объект, транспортируемый через закрытый канал, указанное приводное средство, расположенное между входным и выходным участками указанного прохода и содержащее первую рабочую зону в отрицательном цикле привода и вторую рабочую зону в положительном цикле привода; метод оптимизации, как минимум, одной величины характеристики объекта транспортирующей текучей среды указанной транспортировки указанного объекта, находящегося в текучей среде, в отношении энергопотребления приводного средства содержащий: обеспечение, как минимум, одного шунтирующего канала от указанной второй рабочей зоны до указанной первой рабочей зоны; создание потока указанной текучей среды с находящимся в ней объектом через указанный шунтирующий канал от указанной второй рабочей зоны до указанной первой рабочей зоны; и изменение указанной, как минимум, одной величины указанной текучей среды с находящимся в ней указанным объектом и разности в величине между указанными циклами; модулирование потока через указанный шунтирующий канал, для оптимизации, указанной, как минимум, одной величины, отражающей потребления энергии приводного средства.
В качестве указанного выше циклического приводного средства (или средства воздействия) может использоваться либо средство перепада давления, либо средство прямого энергетического воздействия. Этот метод охватывает все возможные пространственные состояния транспортируемого объекта. В ряде случаев, указанный объект может являться текучей средой и выполнять при этом функцию указанной несущей среды. В других случаях, указанный объект может быть конструктивно не связан, либо - конструктивно связан со средством воздействия в процессе его транспортировки. В определенных ситуациях, конструктивная часть указанного объекта может выполнять функцию преобразовательного элемента средства воздействия для обеспечения процесса преобразования подводимой к нему энергии, выделяемой при принудительном взаимодействии конструктивной части указанного объекта с текучей средой.
Другим существенным признаком настоящего изобретения является то, что указанное выше заданное модулирование величины воздействия в средстве воздействия выполняется путем обеспечения заданного динамического периодического изменения величины параметра, динамически связанного с процессом преобразования в средстве воздействия подводимой к нему энергии в указанное воздействие, с одновременным заданным изменением указанной величины параметра в каждом периоде его указанного изменения для обеспечения процесса транспортировки объекта. Указанный подход может быть применен как в случае использования средства перепада давления, так и в случае использования средства прямого энергетического воздействия.
При этом в качестве указанного параметра процесса преобразования подводимой энергии используют, например: электрический, электромагнитный, магнитный, конструктивный, технический, физический, химический или физико-химический параметры; либо - используют совокупность нескольких видов указанных параметров. Причем в качестве подводимой к указанному средству энергии воздействия может использоваться, например: электрическая, электромагнитная, магнитная, механическая, тепловая энергии; энергия, выделяемая в результате осуществления химической или ядерной реакции; энергия, выделяемая при работе физиологической системы; энергия, принудительного аэродинамического взаимодействия конструктивной части объекта с газообразной средой (выполняющих функцию указанного средства воздействия); энергия, принудительного гидродинамического взаимодействия конструктивной части объекта с жидкостной средой (выполняющих функцию указанного средства воздействия); либо - может использоваться совокупность нескольких видов указанной подводимой энергии.
В соответствии с иными существенными признаками настоящего изобретения, указанное осуществление заданного модулирования величины указанного воздействия в указанном средстве перепада давления, выполняют путем обеспечения одновременного заданного динамического периодического изменения в рабочих зонах указанного средства перепада давления, соответственно, величины отрицательного избыточного давления и величины положительного избыточного давления с одновременным заданным их изменением в каждом периоде указанного изменения указанных величин указанных давлений, создаваемых в указанном процессе преобразования подводимой к указанному средству перепада давления энергии в указанных рабочих зонах, контактирующих с указанной несущей средой так, чтобы обеспечивать указанное приложение к ней создаваемого динамического периодического указанного воздействия, определяемого указанными величинами указанных отрицательного и положительного избыточных давлений, в течение процесса транспортировки указанного объекта.
При этом обеспечение одновременного заданного динамического периодического изменения в указанных рабочих зонах средств перепада давлений, соответственно, величины отрицательного избыточного давления и величины положительного избыточного давления с одновременным заданным их изменением в каждом периоде изменения величин указанных давлений, осуществляют путем заданного динамического периодического изменения величины связывания между собой указанных рабочих зон с одновременным заданным изменением величины указанного связывания в каждом его периоде в ходе указанного обеспечения процесса транспортировки объекта.
В то же время, заданное динамическое периодическое изменение величины связывания между собой указанных рабочих зон с одновременным заданным изменением величины связывания в каждом его периоде, обеспечивается путем заданного динамического периодического создания на участке границы раздела между указанными рабочими зонами проходного канала (или нескольких каналов) с одновременным заданным изменением величины площади минимального проходного сечения канала (или нескольких каналов) в каждом периоде его создания, сопровождаемого осуществлением, соответственно, заданного динамического периодического локального разрушения и последующего восстановления участка границы с одновременным заданным изменением величины площади его локального разрушения в каждом периоде процесса транспортировки указанного объекта. При этом локальное разрушение осуществляется с помощью разрушающего средства, например технического, физического, химического, физико-химического; либо - с помощью совокупности нескольких типов разрушающих средств. Указанный участок границы раздела между указанными рабочими зонами может быть обозначен либо конструктивно, либо - пространственно.
В ряде случаев применения нового метода, в процессе указанного заданного динамического периодического создания на участке границы раздела между указанными рабочими зонами проходного канала (или нескольких каналов) с одновременным заданным изменением величины заданной площади минимального проходного сечения указанного канала (или нескольких каналов), в каждом периоде его воздействия, осуществляется фильтрация локального объема несущей среды, попадающей в зону проходного канала в ходе обеспечения процесса транспортировки объекта.
Приведенные выше существенные признаки настоящего изобретения отражают новый "Принцип внутреннего динамического шунтирования" рабочих зон средства перепада давления.
В соответствии с общими признаками настоящего изобретения, в указанном методе для осуществления заданного модулирования величины указанного воздействия в указанном средстве воздействия, обеспечивают задание значений ее параметров: частоты, диапазона и закона динамического периодического изменения указанной величины указанного воздействия в ходе указанного обеспечения процесса транспортировки указанного объекта. Указанный метод предусматривает возможность реализации одного или несколько основных вариантов указанных заданных значений указанных параметров:
- заданные значения параметров указанного заданного модулирования не изменяются в ходе указанного обеспечения процесса транспортировки;
- значение одного (или нескольких) из указанных заданных параметров указанного заданного модулирования изменяется в заданной зависимости от изменений контролируемой характеристики, связанной с указанным обеспечением процесса транспортировки указанного объекта;
- значения указанных изменяемых параметров указанного заданного модулирования, изменяются в заданной зависимости от изменяемой совокупности нескольких видов указанных контролируемых характеристик, связанных с указанным обеспечением процесса транспортировки указанного объекта.
Указанный процесс предусматривает возможность использования в качестве указанной контролируемой характеристики, без каких-либо ограничений, например:
- значение одного из параметров указанного процесса транспортировки указанного объекта (потребление энергии, оптимизируемое удельное потребление энергии или скоростной параметр);
- значение одного из параметров указанного транспортируемого объекта (скоростного, расходного, аэродинамического, гидродинамического, структурного, физического, амплитудно-частотного, химического или геометрического);
- значение одного из параметров пространственного положения указанного объекта в ходе указанного обеспечения процесса его транспортировки;
- значение одного из параметров поверхности расположения указанного объекта в ходе указанного обеспечения процесса его транспортировки (например, физико-механического);
- значение одного из параметров указанного потока несущей среды в ходе указанного обеспечения процесса транспортировки указанного объекта (например: скоростного, структурного, физического или химического);
- значение одного из параметров турбулентного процесса в указанном потоке несущей среды в ходе указанного обеспечения процесса транспортировки указанного объекта (например: амплитудного, частотного или энергетического);
- значение одного из параметров процесса преобразования энергии движения указанного потока несущей среды в другой вид энергии (при взаимодействии либо без взаимодействия с дополнительным источником энергии, действующей на указанный поток) в ходе указанного обеспечения процесса транспортировки указанного объекта.
Впервые, предложенная авторами функциональная классификация методов минимизации гидродинамического сопротивления турбулентного потока среды (предложенная за последние 100 лет) позволила разделить их на четыре группы. При этом анализ методов минимизации гидродинамического сопротивления сделан с учетом особенностей видов воздействий на структуру турбулентного потока и турбулентного пограничного слоя.
Первая группа содержит методы механического конструктивно-параметрического возмущения потока среды. Указанные методы используют изменения внутренней поверхности трубопровода, например:
- метод механического конструктивно-геометрического возмущения потока среды (например: турбулизаторы, установленные на внутренней поверхности трубопровода для локального возмущения турбулентного пограничного слоя - Германия, 1904);
- метод механического конструктивно-поверхностного возмущения потока среды (например: полимерное покрытие внутренней поверхности трубопровода для уменьшения напряжения трения - США, 1916).
Общие недостатки указанной первой группы методов - следующие: возмущение действует на локальную часть потока; невозможность автоматического управления воздействия на процесс для изменения технологических параметров потока среды; ограниченные возможности применения с конструктивной точки зрения; высокая цена технической реализации; возможность химических реакций между полимерным покрытием и средой различных потоков и т.п.
Вторая группа содержит методы изменения реологических параметров потока среды. Указанные методы используют инжектирование дополнительных жидких полимеров в поток среды, например:
- метод локального полимерного дозирования реологических изменений потока среды (например: инжектирование малого количества полимеров с длинными и тяжелыми молекулами в поток среды для уменьшения его вязкости - Нидерланды, 1948).
Общие недостатки указанной второй группы методов - следующие: изменение химического состава потока среды; используется только для ограниченного вида потоков, которые допускают загрязнения и т.п.
Третья группа содержит методы механического локального периодического возмущения потока среды. Указанные методы используют различные виды локального периодического возмущающего энергетического воздействия потока среды, например:
- метод механического локального продольного периодического возмущения потока среды (например: малые локальные возмущения обеспечиваются продольными колебаниями стенки канала или участка трубопровода - Англия, 1963);
- метод механического локального поперечного периодического возмущения потока среды (например: малые локальные возмущения обеспечиваются поперечными колебаниями элементов канала или трубопровода вокруг его оси - Англия, 1986);
- метод механического локального вращательного периодического возмущения потока среды (например: малые локальные вращательные возмущения обеспечиваются вращением трубы вокруг своей оси - США, 1988);
- метод механического локального радиального периодического возмущения потока среды (например: малые локальные возмущения обеспечиваются механическими радиальными периодическими сжатиями, распространяющимися по всему сечению трубопровода - Дания, 1997).
Общие недостатки указанной третьей группы методов - следующие: малые локальные возмущения; расход дополнительной энергии; конструктивная сложность практической реализации; ограниченная область применений и т.п.
Как было показано многолетними исследованиями авторов (в компании "РЭМКО Интернейшенел, Инк.", Пеннсилвания, США), указанные выше фундаментальные новые (четвертая группа) методы динамической транспортировки объекта потоком несущей среды (США, 1990 и 2004) не имеют практических аналогов в истории развития гидродинамики по реальным возможностям уменьшения гидродинамического сопротивления турбулентных потоков. Указанные динамические энергосберегающие методы (по комплексу четырнадцати анализируемых основных конструктивных, энергетических, эксплуатационных и экономических критериев) существенно превосходят все вышеотмеченные методы уменьшения гидродинамического сопротивления турбулентных потоков сред. Широкое эффективное практическое приложение новых (модуляционных) методов открывает качественно новые возможности уменьшения (на десятки процентов) гидродинамического сопротивления турбулентных потоков.
Поэтому дальнейший поиск научно-обоснованных путей энергетической оптимизации указанных динамических энергосберегающих методов является приоритетным для ускорения практического развития модуляционных аэро- и гидродинамических процессов сверхпроводящей транспортировки объектов потоком несущей среды.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Целью настоящего изобретения является предложение нового метода, динамической энергосберегающей сверхпроводящей транспортировки потока среды, основанного на новых модуляционных принципах.
Предложенный метод основан на результатах многолетних научно-исследовательских работ докторов А.Релина и И.Марта, развивавших концепции вышеупомянутой новой теории "Модуляционная аэро- и гидродинамика процессов транспортировки объектов потоком несущей среды". Указанные научные исследования ставили цели, связанные с решением ряда фундаментальных принципиально новых научно-практических задач:
- установление научно-обоснованного закона указанного негативного модулирования, обеспечивающего наибольшую энергетическую эффективность процесса введения в поток модулируемого потоко-формирующего энергетического воздействия и корреляции, связывающей другие основные предопределяемые параметры модулирования (частоту и диапазона);
- установление научно-обоснованной диапазона для выбора частоты указанного негативного модулирования, обеспечивающего наибольшую энергетическую эффективность волнового процесса введения в поток модулируемого потоко-формирующего энергетического воздействия;
- установление научно-обоснованного критерия энергетической оптимизации указанного негативного модулирования величины потоко-формирующего энергетического воздействия для реализации указанного нового метода динамической энергосберегающей сверхпроводящей транспортировки потока среды;
- установление научно-обоснованного нового дополнительного временного параметра указанного негативного модулирования, обеспечивающего наибольшую энергетическую эффективность процесса введения в поток модулируемого потоко-формирующего энергетического воздействия, когда указанный модулируемый поток среды связан, как минимум, с одним независимым предопределяемым периодическим процессом;
- установление научно-обоснованной области для реализации динамически эффективного волнового процесса динамического связывания в процессе технической реализации указанного выше "Принципа управляемого внутреннего динамического шунтирования" всасывающей и нагнетающей рабочих зон средства потоко-формирующего энергетического воздействия, или указанного выше "Принципа управляемого внешнего динамического шунтирования".
Впервые эти научные исследования позволили предложить новые наиболее энергетически эффективные принципы осуществления указанного негативного модулирования величины потоко-формирующего энергетического воздействия для реализации указанного нового метода динамической энергосберегающей сверхпроводящей транспортировки потока среды.
В соответствии с указанными целями, а также с иными целями, которые могут стать очевидными в дальнейшем, одним из существенных признаков настоящего изобретения, кратко сформулированным, является новый метод динамической энергосберегающей сверхпроводящей транспортировки потока среды, включающий следующее.
В динамической системе управляемой транспортировки потока среды для обеспечения динамического процесса движения среды содержащей, как минимум, одно средство потоко-формирующего энергетического воздействия; метод энергетической оптимизации, включающий ступени:
- негативное модулирование величины указанного потоко-формирующего энергетического воздействия содержит обеспечение частоты, диапазона и закона, как общих предопределенных параметров модулирования;
- величина указанной предопределенной частоты изменяется так, чтобы обеспечивать плоскую форму волн модулируемого потоко-формирующего энергетического воздействия в потоке, распространяющихся вдоль оси указанного модулируемого потока среды;
- указанное модулирование включает обеспечение сравнительной фазы как дополнительный предопределяемый модуляционный параметр, когда указанный модулируемый поток среды связан, как минимум, с одним независимым предопределенным периодическим процессом;
- обеспечение минимального значения энергетического отношения контролируемого действующего значения указанной потоко-формирущей энергии к контролируемому действующему значению формируемой кинетической энергии указанного модулируемого потока среды, в течение указанного процесса потока среды, путем изменения величины, как минимум, одного параметра модулирования в зависимости от изменения величины, как минимум, одной характеристики, связанной с процессом динамического потока среды, для динамической структурно-энергетической оптимизации, в энергоэффективной манере, указанного динамического процесса потока среды.
В качестве указанного средства потоко-формирующего энергетического воздействия, могут использоваться либо средство перепада давления, либо средство прямого энергетического воздействия. Предлагаемый метод охватывает все возможные пространственные состояния транспортируемого объекта. При этом в ряде случаев указанный объект может быть текучей средой и выполнять при этом функцию указанной несущей среды. В других случаях указанный объект может быть конструктивно не связан, либо - конструктивно связан с указанным средством воздействия в указанном процессе его транспортировки. В определенных ситуациях конструктивная часть указанного объекта может выполнять функцию преобразовательного элемента указанного средства воздействия, обеспечивая указанный процесс преобразования указанной подводимой к нему энергии, выделяемой при принудительном взаимодействии указанной конструктивной части указанного объекта с текучей средой.
Отмеченная предопределенная "каплевидная" форма закона указанного негативного модулирования (названная авторами - "каплевидный закон модулирования Релина-Марта") включает обеспечение уменьшения величины указанного потоко-формирующего энергетического воздействия от текущего максимального значения на предопределенную величину диапазона указанного модулирования в течение предопределенного фронтального времени, реализующего предопределенную фронтальную короткую часть указанной "каплевидной" формы закона; и обеспечение восстановления величины указанного потоко-формирующего энергетического воздействия до указанного текущего максимального значения в течение предопределенной обратной удлиненной части указанной "каплевидной" формы указанного закона, в течение каждого предопределенного периода указанного негативного модулирования, измененного для обеспечения заданного периода и частоты указанного модулирования.
В то же время, предопределенная фронтальная короткая часть "каплевидной" формы указанного закона модулирования изменяется по форме кривой предопределенной части эллипса так, что горизонтальная ось указанного эллипса совпадает с горизонтальной осью указанной "каплевидной" формы указанного закона модулирования, а указанная предопределенная обратная удлиненная часть указанного "каплевидной" формы закона модулирования изменяется по форме кривой предопределенной степенной функции так, что начальное значение кривой указанной степенной функции совпадает с конечным значением кривой указанной четверти эллипса.
Указанная предопределенная "каплевидная" форма указанного закона негативного модулирования включает обеспечение предопределенного значения временного отношения указанного предопределенного фронтального времени к предопределенному периоду указанного негативного модулирования; а значение указанного временного отношения выбирается из диапазона: больше чем нуль и меньше чем 0,5. Величина временного отношения является дополнительным параметром указанного негативного модулирования и может быть переменной в зависимости от изменения величины, как минимум, одной характеристики, связанной с указанным динамическим процессом потока среды, для обеспечения минимального значения энергетического отношения контролируемого действующего значения указанной модулируемой потоко-формирующей энергии к контролируемому действующему значению формируемой кинетической энергии указанного модулируемого потока среды в течение указанного динамического процесса потока среды, для динамической структурно-энергетической оптимизации, в энергоэффективной манере, указанного процесса.
Изменения указанной величины временного отношения могут содержать:
- изменение предопределенного фронтального времени и обеспечение предопределенного периода указанного негативного модулирования, одновременно;
- изменение предопределенного периода указанного негативного модулирования и обеспечение предопределенного фронтального времени, одновременно;
- изменение предопределенного фронтального времени и предопределенного периода указанного негативного модулирования, одновременно.
В соответствии с иными существенными признаками настоящего изобретения, модулируемый поток среды включает обеспечение предопределенной сравнительной фазы негативного модулирования, измененной для обеспечения фазового сдвига относительно сравнительной фазы указанного независимого предопределенного периодического процесса. В то же время, независимый предопределенный периодический процесс включает обеспечение: частоты, диапазона, закона и сравнительной фазы предопределенных периодических параметрических изменений.
Описанный выше независимый предопределенный периодический процесс может содержать, без ограничения, например:
- обеспечение модулирования величины потоко-формирующего энергетического воздействия, как минимум, одного дополнительного средства потоко-формирующего энергетического воздействия, непосредственно связанного с модулируемым потоком среды;
- обеспечение модулирования величины потоко-формирующего энергетического воздействия, как минимум, одного дополнительного средства потоко-формирующего энергетического воздействия, связанного с модулируемым потоком среды, как минимум, через одну рабочую зону воздействия потока среды, включающую, как минимум, один объект воздействия потока среды.
Перечисленные выше рабочие зоны действия потока среды могут содержать, как минимум, один перфорированный вход для обеспечения перфорированных потоков среды, а перечисленные выше объекты воздействия потока среды могут быть, без каких-либо ограничений:
- объектом с пористой структурой;
- объектом с фильтрующей структурой;
- пористым объектом, насыщенным средой;
- объектом с конструктивной структурой;
- объектом специфического детектирования.
В соответствии с иными существенными признаками настоящего изобретения, указанный независимый предопределенный периодический процесс может включать, без каких-либо ограничений:
- обеспечение предопределенного периодического инжектирования указанного модулируемого потока вовнутрь, как минимум, одной рабочей зоны;
- обеспечение предопределенного периодического инжектирования указанного модулируемого потока вовнутрь, как минимум, одной рабочей зоны для реализации технологического процесса в указанной рабочей зоне, включающей, как минимум, один объект воздействия потока среды;
- обеспечение предопределенного периодического энергетического воздействия указанного модулируемого потока среды вовнутрь, как минимум, одной рабочей зоны для реализации процесса преобразования энергии указанного модулируемого потока среды в указанной рабочей зоне (например: зона горения инжектируемого модулируемого потока среды или зона горения инжектируемого модулируемого потока топлива в камере сгорания двигателя внутреннего сгорания).
Перечисленный выше независимый, предопределенный, периодический процесс может содержать обеспечение модулирования величины потоко-формирующего энергетического воздействия, как минимум, одного дополнительного средства потоко-формирующего энергетического воздействия, связанного с дополнительным модулируемым потоком среды, конструктивно отделенный от общего модулируемого потока среды. В то же время, конструктивно отделенный дополнительный модулируемый поток среды и указанный модулируемый поток среды, предопределены одновременно, чтобы обеспечивать, без каких-либо ограничений:
- теплопередающий процесс внутри двухканального теплообменника, содержащего внутренний и внешний теплообмены;
- процесс движения, как минимум, одного объекта, конструктивно связанного с указанными модулируемыми потоками среды.
Указанный независимый предопределенный периодический процесс может содержать обеспечение модулирования величины потоко-формирующего энергетического воздействия и, как минимум, одного дополнительного средства потоко-формирующего энергетического воздействия, связанного с дополнительным модулируемым потоком среды, конструктивно непосредственно не связанным с указанным модулируемым потоком среды.
В соответствии с иными существенными признаками настоящего изобретения, указанное обеспечение минимального значения энергетического отношения (названное авторами "Критерием энергетической оптимизации модулируемого потока среды Релина-Марта") стремится к достижению минимального значения (теоретически равного единице) для поддержания сверхпроводящего энергетического режима указанной транспортировки модулируемого потока среды ("сверхпроводящий поток").
В то же время, контролируемое действующее значение указанного потоко-формирующего энергетического воздействия может быть вычислено с использованием, например: контролируемого действующего значения модулируемого давления потока среды, обеспечиваемого указанным средством потоко-формирующего энергетического воздействия; или величины потребления энергии указанного средства потоко-формирующего энергетического воздействия.
Отмеченное вышеуправляемое действующее значение указанной формируемой кинетической энергии указанного модулируемого потока среды может быть вычислено с использованием, например: контролируемого действующего значения скорости модулируемого потока среды и предопределенной величины плотности потока среды; или - контролируемого действующего значения скорости модулируемого потока среды и контролируемого действующего значения плотности потока среды.
Новый метод позволяет реализовать один или нескольких вариантов указанного негативного модулирования величины потоко-формирующего энергетического воздействия обеспечивающего, например:
- процесс внутреннего модулирования, который реализует принцип управляемого внутреннего динамического шунтирования всасывающей и нагнетающей рабочих зон указанного средства потоко-формирующего энергетического воздействия, как заявлено, например, в Патенте США №6827528 (2004) - А.Релин;
- процесс внешнего модулирования, который реализует принцип управляемого внешнего динамического шунтирования выбранного участка модулируемого всасывающего потока среды, связанного с всасывающей рабочей зоной указанного средства потоко-формирующего энергетического воздействия, как заявлено, например, в Патенте США №5593252 (1997) - А.Релин и др.;
- процесс внутреннего модулирования, который реализует принцип управляемого внутреннего динамического шунтирования всасывающей и нагнетающей рабочих зон указанного средства потоко-формирующего энергетического воздействия, и процесс внешнего модулирования, который реализует принцип управляемого внешнего динамического шунтирования выбранного участка модулируемого всасывающего потока среды, связанного со всасывающей рабочей зоной указанного средства потоко-формирующего энергетического воздействия, одновременно;
- управляемое предопределенное динамическое периодическое изменение величины, как минимум, одного параметра, динамически связанного с процессом преобразования потребляемой энергии в указанное модулируемое потоко-формирующее энергетическое воздействия, реализуемое в указанном средстве потоко-формирующего энергетического воздействия, как заявлено, например в Патенте США №6827528 (2004) - А.Релин.
В соответствии с иными существенными признаками настоящего изобретения, указанное динамическое шунтирование включает обеспечение управляемого предопределенного динамического периодического связывания указанного модулируемого всасывающего потока среды с модулируемым шунтирующим потоком среды, реализуемого вблизи указанного модулируемого всасывающего потока среды. В то же время, перечисленное выше модулирование содержит модуляционный дискретный вход и оптимизационный параметрический вход.
В ряде случаев, использование нового метода энергетической оптимизации позволяет реализовать обеспечение максимальной величины энергетической эффективности указанного динамического процесса потока среды путем изменения величины, как минимум, одного параметра модулирования, в зависимости от изменения величины, как минимум, одной характеристики, связанной с указанным динамическим процессом потока среды, для динамической структурно-энергетической оптимизации, в энергоэффективной манере, динамического процесса потока среды. Энергетическая оптимизация может обеспечивать возможность использования различных характеристик, связанных с динамическим процессом потока среды, например, без каких-либо ограничений, как заявлено в Патенте США №7556455.
Новые признаки, считающиеся характерными чертами настоящего изобретения, конкретным образом описаны в прилагаемых клеймах изобретения. Само по себе изобретение, однако как в отношении самого предлагаемого нового метода, так и в отношении его возможных различных реализации, а также в отношении его дополнительных целей и преимуществ, будет лучше понятно из нижеследующего описания, совместно с прилагаемыми чертежами.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фигура 1 иллюстрирует один из возможных вариантов схемы функциональной структуры динамической системы транспортировки, содержащей две идентичные подсистемы, включающие средство потоко-формирующего энергетического воздействия (например, насос) и энергосберегающий динамический модуль (связанный с указанным средством) каждая, для обеспечения динамического процесса трубопроводной транспортировки потока среды, реализующего новый метод динамической энергосберегающей сверхпроводящей транспортировки потока среды, в соответствии с настоящим изобретением;
Фигура 2 иллюстрирует один из возможных вариантов схемы функциональной структуры энергосберегающего динамического модуля, связанного с насосом в динамической подсистеме, реализующий новый метод динамической энергосберегающей сверхпроводящей транспортировки потока среды, в соответствии с настоящим изобретением;
Фигура 3 иллюстрирует диаграмму примера предопределенной "каплевидной" формы закона динамического периодического изменения величины внутреннего модулирования связывания между рабочими зонами насоса, обеспечиваемого энергосберегающим динамическим модулем, реализующим принцип управляемого внутреннего динамического шунтирования всасывающей и нагнетающей рабочих зон средства (насоса) потоко-формирующего энергетического воздействия;
Фигура 4 иллюстрирует диаграмму примера предопределенной "каплевидной" формы закона одновременного динамического периодического изменения (негативное модулирование) величины потоко-формирующего положительного избыточного давления в нагнетающей рабочей зоне и величины потоко-формирующего негативного избыточного давления во всасывающей рабочей зоне средства (насоса) потоко-формирующего энергетического воздействия;
Фигура 5 иллюстрирует один из возможных вариантов изменений величины энергетического отношения контролируемого действующего значения модулируемой потоко-формирующей энергии к контролируемому действующему значению формируемой кинетической энергии модулируемого потока среды, в зависимости от изменения величины, как минимум, одного модуляционного параметра (частоты) в процессе динамической структурно-энергетической оптимизации турбулентного потока;
Фигура 6 иллюстрирует один из возможных вариантов схематического представления процесса изменения величины гидродинамической векторизации и доминирующего размера частиц среды турбулентного модулируемого потока, в зависимости от изменения величины, как минимум, одного параметра модулирования (частоты) в процессе динамической структурно-энергетической оптимизации турбулентного потока;
Фигура 7 иллюстрирует один из возможных вариантов изменения величины процесса изменения диссипируемой энергии турбулентного модулируемого потока среды в зависимости от изменения величины, как минимум, одного параметра модулирования (частоты) в процессе динамической структурно-энергетической оптимизации турбулентного потока;
Фигура 8 иллюстрирует один из возможных вариантов изменения величины кинетической энергии турбулентного модулируемого потока среды в зависимости от изменения величины, как минимум, одного параметра модулирования (частоты) в процессе динамической структурно-энергетической оптимизации турбулентного потока;
Фигура 9 иллюстрирует диаграмму примера фазового сдвига, обеспечиваемого между предопределенными сравнительными фазами двух связанных процессов предопределенного "каплевидной" формой негативного модулирования величины потоко-формирующего энергетического воздействия, реализуемого одновременно энергосберегающими динамическими модулями с первым и вторым средствами (насосами) потоко-формирующего энергетического воздействия, соответственно, для обеспечения процесса модулирования потока среды в трубопроводной системе транспортировки;
Фигура 10 иллюстрирует один из возможных вариантов изменения величины энергетического отношения контролируемого действующего значения модулируемой потоко-формирующей энергии к контролируемому действующему значению формируемой кинетической энергии модулируемого потока среды системы транспортировки, содержащей два средства (насоса) модулируемого потоко-формирующего энергетического воздействия, для обеспечения динамического процесса потока среды в системе транспортировки, в зависимости от изменения величины фазового сдвига между двумя связанными модулируемыми поточными процессами, в течение процесса динамической структурно-энергетической оптимизации модулируемого потока среды в трубопроводной системе транспортировки.
ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Предлагаемый новый метод динамической энергосберегающей сверхпроводящей транспортировки потока среды может быть реализован следующим образом.
Один из возможных вариантов схемы функциональной структуры динамической системы транспортировки, содержащей две идентичные динамические подсистемы, включает средство потоко-формирующего энергетического воздействия (насос) и энергосберегающий динамический модуль (связанный с указанным средством) каждая, для обеспечения динамического процесса трубопроводной транспортировки потока среды, как показано на Фигуре 1. Первая динамическая подсистема включает насос 1, представляющий собой циклическое приводное средство для транспортировки среды потока (например - нефти) через закрытый проход и имеющий первую рабочую зону в отрицательном цикле привода (где генерируется отрицательное избыточное давление - ΔРр1) и вторую рабочую зону в положительном цикле привода (где генерируется положительное избыточное давление + ΔРр1). Она имеет привод 2 для насоса 1, всасывающую часть трубопровода 3 и нагнетающую часть трубопровода 4, энергосберегающий динамический модуль 5 (названный авторами - ЭСДМ), связанный с нагнетающей частью трубопровода 4 и всасывающей частью трубопровода 3, соответственно, через длинный входной участок шунтирующего канала 6 модуля и короткий выходной участок шунтирующего канала 7 модуля. Протяженная часть трубопровода 8 связывает первую динамическую подсистему с идентичной второй динамической подсистемой, которая включает насос 9, представляющий собой циклическое приводное средство для транспортировки среды (нефти) потока, проходящего через закрытый проход, и имеющий первую рабочую зону в отрицательном цикле привода (где генерируется отрицательное избыточное давление - ΔРр2) и вторую рабочую зону в положительном цикле привода (где генерируется положительное избыточное давление +ΔРр2). Она имеет привод 10 для насоса 9, всасывающую часть трубопровода 11 и нагнетающую часть трубопровода 12, энергосберегающий динамический модуль 13, связанный с нагнетающей частью трубопровода 12 и всасывающей частью трубопровода 11, соответственно, через длинный входной участок шунтирующего канала 14 модуля и короткий выходной участок шунтирующего канала 15 модуля.
Один из возможных вариантов схемы функциональной структуры энергосберегающего динамического модуля 5, связанного с насосом 1 в первой динамической подсистеме, которая реализует новый метод динамической энергосберегающей сверхпроводящей транспортировки потока среды, в соответствии с настоящим изобретением, показаны на Фигуре 2. Динамический модуль 5, который осуществляет "Принцип управляемого внутреннего динамического шунтирования" рабочих зон насоса 1, функционально (в общем) содержит:
микропроцессорный блок управления 16, корпус клапанного блока 17, внутренняя полость которого связанна, соответственно, через вход с длинным входным участком 6 шунтирующего канала модуля, а через выход - с коротким выходным участком 7 шунтирующего канала модуля, неподвижный цилиндрический клапанный элемент 18, имеющий проходной канал 19, подвижный цилиндрический клапанный элемент 20, имеющий проходной канал 21, привод 22 подвижного цилиндрического клапанного элемента 20, регулирующий элемент (например, кольцо) 23, датчик 24, который контролирует действующую величину скорости потока среды в трубопроводе Vf1(act) и действующую величину плотности потока среды в трубопроводе ρf1(act), а датчик 25 контролирует действующую величину модулируемого давления потока среды в трубопроводе ΔPpm1(act).
Датчик 24 контролирует действующую величину скорости потока среды в трубопроводе Vf1(act) и действующую величину плотности потока среды в трубопроводе ρf1(act), например, может быть двухканальный полукольцевой высокочастотный емкостной датчик, реализованный с использованием "ДНВ технологии измерения", так как заявлено в Патенте США №5502658 (1996) - А.Релин, "Дискретно-непрерывный вероятностный метод измерения скорости объекта, имеющего информационно-структурную неоднородность" или в книге А.Б.Релин, "Системы автоматического контроля технологических параметров землесосных снарядов", - Москва, 1985. Микропроцессорный блок управления 16, имеющий три оптимизационных параметрических входа, связанных с двумя выходами датчика 24 (сигнал Vf1(act) и сигнал ρf1(act)) и выходом датчика 25 (сигнал ΔPpm1(act)); пять модулируемых дискретных входов для задания предопределенных параметров модулирования (частоты fm1, диапазона bm1, закона lm1, сравнительной фазы φm1 негативного модулирования величины потоко-формирующего энергетического воздействия насоса 1, и временного отношения αm1 "каплевидной" формы закона lm1); и два управляемых выхода (сигнал Ufm1 и сигнал Uφm1), связанных с приводом 22 подвижного цилиндрического клапанного элемента 20.
Имеется также неподвижный цилиндрический клапанный элемент 18 с проходным каналом 19, подвижный цилиндрический клапанный элемент 20 с проходным каналом 21, привод 22 клапанного элемента 20, регулирующий элемент 23 и корпус клапанного блока 17, обеспечивающие один из возможных вариантов схемы функциональной структуры цилиндрического клапанного блока энергосберегающего динамического модуля 5, который реализует новый предопределенный "каплевидной" формы закон lm1 динамического периодического изменения величины внутреннего модулированного связывания Cm1 между рабочими зонами насоса 1. Причем вырез проходного канала 19, имеющий предопределенную "каплевидную" форму (половина "капли") с предопределенными размерами, а удлиненная продольная ось выреза совпадает с линией поперечного сечения круга неподвижного цилиндрического клапанного элемента 18. Вырез проходного канала 21 имеет предопределенную линейную прямоугольную форму с предопределенными размерами, а удлиненная продольная ось выреза параллельна продольной оси подвижного цилиндрического клапанного элемента 20. Регулирующий (кольцо) элемент 23 может иметь различную форму по ширине и используется для обеспечения (задания или корректировки) начальной площади и формы поперечного сечения проходного канала, который образуется проходными каналами 19 и 21 в течение процесса вращения подвижного цилиндрического клапанного элемента 20 относительно неподвижного цилиндрического клапанного элемента 18. Регулирующий элемент 23 имеет возможность заданного линейного или заданного углового движения относительно проходного канала 19 для обеспечения (задания или корректировки) начальной площади и формы поперечного сечения наложением формируемого проходного канала. Короткий выходной участок 7 шунтирующего канала модуля имеет минимальную длину для обеспечения минимального расстояния между поперечным сечением наложением формируемого проходного канала и модулируемым всасывающим потоком среды в трубопроводе.
Схема функциональной структуры динамического модуля 13, который также реализует "Принцип управляемого внутреннего динамического шунтирования" рабочих зон насоса 9, реализуется полностью аналогично схеме вышеуказанной функциональной структуры динамического модуля 5. Микропроцессорный блок управления динамического модуля 13 также имеет три аналогичных оптимизационных параметрических входа (сигнал Vf2(act) и сигнал ρf2(act) от датчика контроля действующего значения скорости потока среды в трубопроводе Vf2(act) и действующей величины плотности потока среды (нефти) в трубопроводе ρf2(act) в динамическом модуле 13, а также как сигнал ΔPpm2(act) от датчика контроля действующего значения модулируемого давления потока среды в трубопроводе ΔPpm2(act) в динамическом модуле 13); пять модуляционных дискретных входов для установления предопределенных параметров модулирования (частоты fm2, диапазона bm2, закона lm2, сравнительной фазы φm2 негативного модулирования величины потоко-формирующего энергетического воздействия насоса 9 и временного отношения αm2 "каплевидной" формы закона lm2); и два управляемых выхода (сигнал Ufm2 и сигнал Uφm2), связанных с приводом подвижного цилиндрического клапанного элемента в корпусе модулятора динамического модуля 13. Функциональные элементы динамического модуля 5 и динамического модуля 13 осуществляют обеспечение оптимальных параметров эксплуатации, как показано на Фигуре 1 и Фигуре 2.
Описанная выше динамическая управляемая система транспортировки потока среды, для обеспечения динамического процеса потока среды, реализует новый метод динамической энергосберегающей транспортировки потока среды, в соответствии с предлагаемым изобретением, и работает следующим образом.
После включения привода 2 насоса 1 в первой динамической подсистеме, насос 1 начинает генерировать рабочий перепад давления ΔРр1 - потоко(нефть)-формирующего энергетического воздействия, приложенный к нефтяной среде и генерирующий поток нефти во всасывающей части трубопровода 3 и нагнетающей части трубопровода 4, на Фигурах 1 и 2. В описанном начальном положении работы первой динамической подсистемы, когда энергосберегающий динамический модуль 5 (связанный с нагнетающей частью трубопровода 4 и всасывающей частью трубопровода 3, соответственно, через длинный входной участок шунтирующего канала 6 модуля и короткий выходной участок шунтирующего канала 7 модуля) отключен, площадь поперечного сечения наложением формируемого проходного канала клапанного блока равна нулю. Это, соответственно, определяет нулевое (минимальное) значение Cm1(min) модулируемого связывания Cm1, между рабочими зонами насоса 1, обеспечиваемого динамическим модулем 5, реализующим описанный выше "Принцип управляемого внутреннего динамического шунтирования" первой (- ΔPp1) и второй (+ΔРр1) рабочих зон насоса 1. После включения динамического модуля 5 привод 22 начинает вращать подвижный цилиндрический клапанный элемент 20. Проходные каналы 19 и 21 начинают накладываться друг на друга, что определяет динамическое изменение площади поперечного сечения наложением формируемого проходного канала клапанного блока. Когда площадь поперечного сечения наложением формируемого проходного канала достигает максимальной величины, тогда максимальное значение Cm1(max) модулируемого связывания Cm1 рабочих зон насоса 1 с помощью потока нефти обеспечивается.
Описанные выше формы выреза проходного канала 19 неподвижного цилиндрического клапанного элемента 18 и проходного канала 21 подвижного цилиндрического клапанного элемента 20 обеспечивают реализацию предопределенной "каплевидной" формы закона динамического периодического изменения величины внутреннего модулируемого связывания Cm1 между рабочими зонами насоса 1 (Фигура 3). Предопределенное периодическое (с предопределенным периодом Tm1) модулирование связывания Cm1 определяется скоростью вращения привода 22 подвижного цилиндрического клапанного элемента 20. В то же время, каждый предопределенный период Tm1 изменения величины внутреннего модулирования связывания Cm1 включает обеспечение увеличения величины Cm1 от минимального значения (нуль) Cm1(min) до максимального значения Cm1(max) в течение предопределенного фронтального времени tF1 реализации предопределенной фронтальной короткой части указанной "каплевидной" формы указанного закона (см. участок диаграммы "а-b"), и обеспечение уменьшения величины Cm1 от максимального значения Cm1(max) до минимального значения Cm1(min) в течение предопределенного обратного времени tB1 реализации предопределенной обратной удлиненной части указанной "каплевидной" формы указанного закона (см. участок диаграммы "b-с"), Предопределенный участок диаграммы "а-b" изменяется по форме кривой предопределенной четверти эллипса так, что горизонтальная ось указанного эллипса совпадает с горизонтальной осью указанной "каплевидной" формы закона. Предопределенный участок диаграммы "b-с" изменяется по форме кривой предопределенной степенной функции так, что начальное значение указанной кривой степенной функции совпадает с конечным значением указанной кривой четверти эллипса.
В свою очередь, предопределенное изменение величины внутреннего модулируемого связывания Cm1 в каждом предопределенном периоде Tm1 приводит к одновременным предопределенным динамическим периодическим изменениям (модулированию) величины отрицательного избыточного давления - ΔPpm1 и величины положительного избыточного давления +ΔPpm1 в каждом периоде изменений, соответственно, во всасывающей и нагнетающей рабочих зонах насоса 1 (Фигура 4). При этом величина модулируемого отрицательного избыточного давления - ΔPpm1 динамически и периодически изменяется в предопределенном диапазоне bm1 негативного модулирования: от - ΔPpm1(max) до - ΔPpm1(min), в то время, как величина модулируемого положительного избыточного давления + ΔPpm1 изменяется одновременно периодически в предопределенном диапазоне bm1 негативного модулирования: от + ΔPpm1(max) до + ΔPpm1(min). Описанные выше максимальные значения избыточных давлений - ΔPpm1(max) и + ΔРрm1(mах) соответствуют моменту времени, когда площадь поперечного сечения наложененим формируемого проходного канала клапанного блока равна нулю (минимальное значение Cm1(min)). Описанные выше минимальные значения избыточных давлений - ΔPpm1(min) и + ΔPpm1(min) соответствуют моменту времени, когда площадь поперечного сечения наложением формируемого проходного канала клапанного блока максимальна (максимальное значение Cm1(max)). Такая ситуация происходит в каждом периоде Tm1 периодически повторяющихся наложений подвижного цилиндрического клапанного элемента (с предопределенной частотой негативного модулирования fm1=1/Tm1).
Таким образом, в результате описанного выше динамического периодического шунтирующего взаимодействия элементов энергосберегающего динамического модуля 5 со, соответственно, всасывающей и нагнетающей рабочими зонами насоса 1, осуществляется предопределенное негативное модулирование величины перепада давления ΔPpm1 (потоко-формирующего энергетического воздействия) в предопределенном диапазоне bm1 своего динамического периодического изменения (ΔPpm1(max) - ΔPpm1(min)) в течение процесса транспортировки потока среды (нефти). Негативное модулирование величины перепада давления ΔPpm1 осуществляется по закону lm1 "каплевидной" формы (Фигура 4), которая обеспечивает:
- уменьшение величины указанного потоко-формирующего энергетического воздействия ΔPpm1 от текущего максимального значения ΔPpm1(max) на предопределенную величину указанного диапазона bm1 модулирования (до ΔPpm1(min)) в течение предопределенного фронтального времени tF1 реализации предопределенной фронтальной короткой части lm1(a-b) (см. участок диаграммы "а-b") указанной "каплевидной" формы закона lm1 в течение каждого предопределенного периода Tm1 указанного негативного модулирования, который изменяется по форме кривой предопределенной четверти эллипса так, что горизонтальная ось указанного эллипса совпадает с горизонтальной осью указанной "каплевидной" формы закона lm1 указанного модулирования;
- восстановление величины указанного потоко-формирующего энергетического воздействия ΔPpm1 до указанного текущего максимального значения ΔPpm1(max) в течение предопределенного обратного времени tB1 реализации предопределенной обратной удлиненной части lm1(b-c) (см. участок диаграммы "b-с") указанной "каплевидной" формы указанного закона lm1 в течение каждого предопределенного периода Tm1 указанного негативного модулирования, который изменяется по форме кривой предопределенной степенной функции так, что начальное значение указанной кривой степенной функции совпадает с конечным значением указанной кривой четверти эллипса ΔPpm1(min), для обеспечения предопределенного периода Tm1 указанного модулирования;
- предопределенную величину временного отношения αm1 указанного фронтального времени tF1 в указанный предопределенной период Tm1 указанного негативного модулирования, которое является дополнительным предопределенным модуляционным параметром указанного негативного модулирования (αm1=tF1/Tm1) и выбирается из диапазона: больше чем нуль и меньше чем 0,5.
Упомянутый выше, так называемый, "каплевидный" закон модулирования Релина-Марта" lm1 (для указанного выше примера) описывается двумя выражениями:
- lm1(a-b)=ΔPpm1(max)-bm1*[1-(1-t/tF1)2]1/2, для 0≤t≤tF1; и
- lm1(b-c)=(ΔPpm1(max)-bm1)+bm1*(t-tF1)θ/(Тm1-tF1)θ, для tF1≤t≤Тm1;
где θ>1 (зависит от tF1, Tm1 и bm1).
Действующее значение указанного потоко-формирующего энергетического воздействия определяется с использованием контролируемого действующего значения модулируемого давления потока среды ΔPpm1(act). Модулируемая волна давления ΔPpm1 (модулированное энергетическое воздействие) образуется при вращении подвижного цилиндрического клапанного элемента 20 клапанного блока путем наложения поперечного сечения проходного канала 21, подвижного клапанного элемента 20 и поперечного сечения проходного канала 19 неподвижного элемента 18 клапанного блока, осуществляющего коммутацию зоны с давлением + ΔРрm1 длинного входного участка 6 шунтирующего канала с зоной с давлением - ΔРрm1 короткого выходного участка 7 шунтирующего канала энергосберегающего динамического модуля 5. Образуемая модулируемая волна давления ΔРрm1 распространяется через короткий выходной участок 7 шунтирующего канала во всасывающую часть трубопровода 3 и далее в нагнетающую часть трубопровода 4 вдоль продольной оси потока нефти. Короткий выходной участок 7 шунтирующего канала обеспечивает минимальное расстояние между поперечным сечением наложением формируемого проходного канала и модулируемым всасывающим потоком среды в трубопроводе, которое, благодаря существенному сокращению времени "пробега" коммутационной волны давления в шунтирующем канале, позволяет обеспечивать "каплевидную" форму указанного закона модулирования lm1 с минимальным искажением. Необходимо отметить, что существенное влияние на искажение гидродинамической реализации заданной "каплевидной" формы закона изменения модулируемой плоской волны давления оказывают величины конструктивных углов сопряжении продольных осей указанного короткого выходного участка 7 шунтирующего канала модуля и указанной всасывающей части трубопровода 3 (βs), а также - продольных осей указанного длинного входного участка 6 шунтирующего канала модуля и указанной нагнетающей части трубопровода 4 (βp), соответственно (см. Фигура 2). Кроме того, выбор величин указанных углов (βs и βp) предопределяет возможность гидродинамического обеспечения преимущественного распространения энергии модулируемых волн давления как во всасывающем направлении, так и в нагнетающем направлении потоков сред в трубопроводе. Описанное выше предопределяется пространственно-ориентируемым (при помощи указанных углов βs и βp) гидродинамическим наложением модулируемого потока энергии в шунтирующем канале на основной поток энергии среды в трубопроводе. Распространение модулируемых волн давления через поток среды в трубопроводе осуществляется в виде плоских волн, которые реализуют максимальное энергетическое волновое воздействие на турбулентность и на пограничный слой потока среды в трубопроводе. Предопределенная частота fm1 указанного модулирования изменяется так, чтобы обеспечивать плоскую форму продольных волн модулируемого энергетического воздействия ΔРрт1 в потоке в трубопроводе, учитывая, что скорость распространения волн в потоке среды (нефть) в трубопроводе Cfm и диаметр трубопровода dp связаны соотношением: fm1 << 0.3 * Cfm / dp.
Исследования авторов с использованием экспериментальных результатов подтвердили, что предложенная ими оптимальная "каплевидная" форма закона модулирования lm1(opt) наиболее эффективна (по сравнению с другими возможными известными формами закона модулирования, например: синусоидальной, прямоугольной, треугольной, трапецеидальной и т.п.) для введения в поток среды модулируемой потоко-формирующей энергии. Кроме того, оптимальная "каплевидная" форма закона модулирования lm1(opt) (учитывая ее заданную натуральную форму) эффективно связывает все основные предопределенные модуляционные параметры указанного негативного модулирования потоко-формирующей энергии между ними. Это явилось основой впервые созданной математической модуляционно-гидродинамической модели для компьютерных исследований оптимальных модуляционных параметров: fm1(opt), bm1(opt), αm1(opt). Отмеченная выше, так называемая "Каплевидно модулирующая модуляционно-гидродинамическая модель Репина-Марта", впервые созданная с использованием уникальной экспериментальной информации и, так называемого, "Модуляционного энергетического критерия оптимизации потока среды Релина-Марта" ЕRm1 (для отмеченного выше примера), описывается выражением:
ЕRm1=Effm1(act)/Ekm1(act)=ΔPpm1(act)/(ρf1(act)*V2 f1(act)/ 2), где
Effm1(act) - контролируемая действующая величина динамической потоко-формирующей энергии,
Ekm1(act) - контролируемая действующая величина кинетической энергии потока среды,
ΔPpm1(act) - контролируемая действующая величина модулируемого давления потока среды,
ρf1(act) - контролируемая действующая величина плотности потока среды (нефти) в трубопроводе и
Vf1(act) - контролируемая действующая величина скорости потока среды (нефти) в трубопроводе.
В соответствии с иными существенными признаками настоящего изобретения, обеспечение указанного минимального значения энергетического отношения (критерия энергетической оптимизации ER) стремится к достижению минимального значения (теоретически - равного единице), для поддержания сверхпроводящего энергетического режима указанной транспортировки модулируемого потока среды ("сверхпроводящий поток"). Значения, отмеченных выше, оптимальных параметров модулирования: fm1(opt), bm1(opt), αm1(opt) (с использованием "каплевидного" закона модулирования lm1(opt)), соответствующие расчетному минимальному значению критерия энергетической оптимизации ERm1(min), обеспечивают указанный сверхпроводящий режим. В то же время, отмеченные выше конструктивные углы продольных осей (βs и βр), связывающие модуляцию и модулирование энергий, могут использоваться как дополнительные модуляционные параметры для указанной энергетической оптимизации и/или оптимизационных изменений в процессе транспортировки потока среды через трубопровод. Указанный сверхпроводящий энергетический режим определяется из функциональной зависимости ЕRm1 и может быть получен, например, на основе компьютерного моделирования с использованием отмеченной выше "каплевидной" модуляционной гидродинамической модели и П-теоремы анализа размерностей. Сказанное определяет корреляцию критерия ЕRm1 с модуляцией и критерием Рейнольдса, зависящую от величины модуляционных параметров и параметров потока среды в трубопроводной системе: максимального энергетического воздействия помпы ΔPpm1(max), длины трубопровода Lp, диаметра трубопровода dp, действующего значения скорости потока среды (нефти) в трубопроводе Vf1(act), действующего значения плотности потока среды (нефти) в трубопроводе ρf1(act), динамической вязкости потока среды µf1, а также - динамической "модуляционной вязкости" потока среды µfm1. Указанный комплекс параметров отражает возможные динамические, структурно-реологические и температурные изменения как в однофазных, так и в многофазных потоках сред. Температурные изменения однофазного потока среды предопределяют изменения плотности потока среды в трубопроводе ρf1(act), динамической вязкости потока среды µf1 и динамической "модуляционной вязкости" потока среды µfm1. В многофазном потоке среды величина µfm1 отражает его среднюю вязкость, которая зависит от объемной концентрации каждой фазы и от ее динамического распределения по поперечному сечению трубопровода. Она также учитывает ориентацию многочастичных кластеров (например, в дисперсных смесях) различных форм (цепочки, треугольники, шестиугольники и т.п.) относительно скорости потока среды. Например, продольная интенсификация движения частиц со знакопеременным ускорением приводит к уменьшению межфазной силы трения. Это приводит к росту указанной величины кинетической энергии гетерогенного многофазного потока среды. Поэтому учет указанного комплекса параметров является очень важным для полного описания и энергетической оптимизации динамических процессов трубопроводной транспортировки гетерогенных и многофазных потоков сред в энергоемких областях (например, в порошковой, нефти и природного газа технологиях трубопроводной транспортировки; в технологиях гидротранспортировки песка, угля и других минералов; и т.п.).
Отмеченная выше схема функциональной структуры энергосберегающего динамического модуля 5 (см. Фигуры 1 и 2) обеспечивает компьютерную оценку оптимальных модуляционных параметров: fm1=fm1(opt), bm1=bm1(opt), lm1=lm1(opt) и αm1=αm1(opt), в микропроцессорном блоке управления 16, а также - в функциональных элементах клапанного блока. При этом оптимальные параметры модулирования: lm1(opt), bm1(opt), and αm1(opt), конструктивно используются при вырезании проходного канала 19, имеющего предопределенную "каплевидную" форму. Расчетное значение оптимального модуляционного параметра fm1(opt), реализуемое предопределенным расчетным значением угловой скорости привода 22 подвижного цилиндрического клапанного элемента 20, изначально обеспечивается контрольными выходами микропроцессорного блока управления 16 (сигнал Ufm1 связан с приводом 22), чтобы обеспечивать минимальное расчетное значение энергетического критерия оптимизации ЕRm1(min), существенно отличающегося от практического значения ЕRm1(mах) (см. Фигуру 5). Отмеченные выше датчик 24 и датчик 25 обеспечивают контроль величин технологических параметров: Vf1(act), ρf1(act) и ΔPpm1(act), поступающих в микропроцессорный блок управления 16 для расчета начального действительного значения критерия энергетической оптимизации ЕRm1(min). Микропроцессорно-управляемое оптимизационное восстановление минимального практического значения ЕRm1(min)cor (когда производная d ЕRm1(min)/dt=0) обеспечивает изменение (на Δfm1(opt)) расчетной величины оптимального модуляционного параметра fm1(opt) до корректируемого значения fm1(opt)cor, путем изменения сигнала Ufm1 (до Ufm1cor), связанного с приводом 22 и изменяющего его угловую скорость.
Из определения выражения для ERm1 следует, что оно достигает минимального значения ЕRm1(min)cor, только, когда контролируемая действующая величина динамического потоко-формирующего энергетического воздействия Effm1(act)=ΔPpm1(act) достигает минимального значения (для fm1(opt)cor) при конкретных значениях технологических параметров Vf1(act) и ρf1(act). Минимальное значение контролируемой действующей величины модулируемого давления потока среды ΔPpm1(act) - это количество энергии, необходимой для совершения работы против турбулентных напряжений трения в ядре потока среды в его пограничном слое, для поддержания контролируемого действующего значения кинетической энергии потока среды Ekm1(act)=ρf1(act)*Vf1(act) 2/2, которая достигает максимального значения. Величина ΔPpm1(act) существенно зависит от структуры турбулентности и состояния пограничного слоя модулируемого потока среды. Поэтому физический смысл величины ΔPpm1(act) аналогичен величине потери давления в трубопроводе длиной Lp и диаметром dp, при контролируемом действующем значении скорости потока среды (нефти) в трубопроводе Vf1(act), контролируемом действующем значении плотности потока среды (нефти) в трубопроводе ρf1(act), динамической вязкости потока среды µf1, а также - динамической "модуляционной вязкости" µfm1. При этом минимальное значение контролируемого действующего значения модулируемого давления потока среды ΔPpm1(act) характеризует минимальную величину гидродинамического сопротивления модулируемого потока среды, которая достигается при отмеченной выше минимальной величине ЕRm1(min)cor за счет микропроцессорно-управляемого оптимизационного восстановления (физическое явление - "сверхпроводящий" модулируемый поток среды, впервые названный так Др. А.Релиным, Патент США №7556455).
Экспериментальные и теоретические исследования, а также компьютерное моделирование процесса энергетической оптимизации модулирования энергии плоских волн давления (выполненные авторами) подтверждают, что продольные плоские волны "каплевидной" формы модулированного потоко-формирующего энергетического воздействия ΔPpm1 в потоке нефти в трубопроводе распространяются вдоль всего потока нефти на десятки миль (со скоростью приблизительно одна миля в секунду) и порождают фундаментально новые существенные объемные изменения структуры турбулентности и пограничного слоя вдоль всего потока в трубопроводе, а также - существенные изменения всей турбулентной кинетической энергии.
Физическая основа выбора "каплевидной" формы закона модулирования lm1 потоко-формирующей энергии базируется на возможности обеспечения необходимых динамических изменений турбулентности и пограничного слоя модулируемого потока среды, которые происходят во время предопределенного периода Tm1. В течение предопределенной задней части времени tB1 происходит продольная переориентация крупномасштабных частиц и их скоростей движения в потоке. Вероятность образования более крупных частиц среды с преимущественно продольной скоростью движения уменьшается. Турбулентные пульсации скорости мелкомасштабных частиц среды также следуют продольной переориентации. В течение времени tB1 увеличение давления в волне сопровождается затуханием генерации мелкомасштабных частиц на поверхности пограничного слоя. Турбулентность потока претерпевает существенные изменения и становится продольно анизотропной. Поэтому толщина пограничного слоя уменьшается. От его поверхности генерируются отрицательные вихри. В течение предопределенного фронтального времени tF1, давление уменьшается быстрее, чем происходит его рост, в течение времени tB1. Релаксация частиц в турбулентном потока происходит по-разному. Мелкомасштабные малоинертные частицы среды стремятся следовать изменениям давления быстрее, чем крупномасштабные частицы. Поэтому интенсивность мелкомасштабной турбулентности слегка увеличивается. В то же время, крупномасштабные частицы более инертны, и в течение фронтального времени tF1, их движение только слабо дезориентируется. Они еще сохраняют свою гидродинамическую устойчивость, но при этом возникают запрещенные состояния их укрупнению. Толщина пограничного слоя слегка увеличивается.
В то же время, распространение модулируемых волн давления вдоль потока среды в трубопроводе сопровождается динамическими упругими локальными колебаниями пограничного слоя. Частота и диапазон указанных упругих колебаний зависят от параметров модулируемых волн: fm1, bm1, lm1 и αm1; плотности Pf1(act) и сжимаемости βm1 потока среды. Из вышеизложенной физической картины следует, что "каплевидная" форма закона модулирования lm1 потоко-формирующего энергетического воздействия позволяет поддерживать, в среднем (в течение периода Tm1), существенное продольно-анизотропное состояние турбулентности и меньшую величину толщины пограничного слоя. Этому динамическому состоянию соответствует меньшая интенсивность турбулентности в потоке среды (а также - турбулентной вязкости), которая предопределяет уменьшение диссипации энергии в потоке. Отмеченное требует, чтобы фронтальное время tF1 "каплевидной" формы закона модулирования lm1 потоко-формирующего энергетического воздействия было меньше, чем обратное время tB1. Указанное условие предопределяет возможность выбора временного отношения αm1=tF1/Tm1 (из вышеуказанного диапазона: больше чем нуль и меньше чем 0.5), учитывая модуляционные, технологические и системные параметры динамической системы транспортировки потока среды. Заданными фронтальным временем tF1 и обратным временем tB1 модулируемой волны давления "каплевидной" формы, можно обеспечивать постоянный профиль скорости в ядре потока среды в трубопроводе. Это устанавливает благоприятные условия для формирования в модулируемом потоке устойчивых периодических тороидальных вихревых структур и других устойчивых упорядоченных вихревых образований (например, ячеистых структур), которые достаточно быстро и легко двигаются через модулируемый поток среды.
Более того, возможно образование фундаментально новых видов ориентированных когерентных вихревых структур, которые возникают только в модулируемом потоке среды. Образование таких устойчивых, периодически ориентированных вихревых структур в модулируемом потоке среды приводит к существенному уменьшению гидродинамического сопротивления и к существенному увеличению кинетической энергии потока среды. В то же время, скорость динамических изменений давления dΔPm1/dt играет существенную (определяющую) роль в изменении состояния турбулентности и пограничного слоя модулируемого потока среды. Указанные изменения неразрывно связаны с формой закона модулирования lm1 в течение фронтального времени tF1 и обратного времени tB1. Поэтому впервые предложенная "каплевидная" форма закона модулирования lm1 потоко-формирующего энергетического воздействия позволяет выбирать оптимальные значения параметров модулирования: частоту fm1(opt), диапазон bm1(opt), фронтальное время tF1(орt), обратное время tB1(opt) и временное отношение αm1(opt), чтобы обеспечивать оптимальное минимальное значение диссипируемой энергии в потоке Edm1(min), оптимальное максимальное значение кинетической энергии Ekm1(max) и, в результате - оптимальное минимальное значение гидродинамического сопротивления модулируемого потока среды.
При этом элементарные частицы потока среды совершают продольные движения со знакопеременным ускорением, перпендикулярные фронтам указанных модулируемых плоских волн давления. Выполненные авторами компьютерные исследования движения частиц потока среды под влиянием модулируемых волн давления подтвердили, что спектр полученных "резонансных" частот колебаний частиц потока среды с максимальным диапазоном для различных потоков сред (например, воды или воздуха) разный. Установлено, что указанные "резонансные " условия зависят от плотности, вязкости и температуры потока среды. Эксперименты также показывают (например, в отмеченном выше модулируемом потоке среды), что оптимальные частоты указанных плоских волн расположены в инфранизком и низком диапазонах частот. Распространение плоских модулируемых волн давления сопровождается подавлением турбулентности на внутренней поверхности трубопровода. Энергетическое воздействие плоских модулируемых волн давления в потоке приводит к "запрету" отрыва мелкомасштабных вихрей с поверхности пограничного слоя (к росту их неустойчивости), который уменьшает их генерацию, и приводит к росту устойчивости крупномасштабных вихрей. Наличие таких дополнительных механизмов неустойчивости в потоке действует по-разному на турбулентные частицы различных масштабов. Отмеченное выше минимальное значение ЕRm1(min)cor для fm1(opt)cor) приводит к оптимизации максимального укрупнения турбулентных частиц и их продольных векторизованных движений (Фигура 6).
В то же время (для fm1(opt)cor), продольные движения элементарных частиц потока среды со знакопеременным ускорением в модулируемом потоке служит как непрерывное динамическое энергетическое воздействие дополнительных источников гидродинамической неустойчивости поверхности пограничного слоя, а следовательно, его толщина и напряжение трения на внутренней стенки трубопровода уменьшаются. Эти продольные движения частиц увеличивают продольную компоненту турбулентной кинетической энергии и уменьшают ее азимутальную компоненту. Поэтому коэффициент турбулентной вязкости уменьшается и, в результате, происходит существенное снижения напряжений трения (особенно в слое на стенке трубопровода). Распределения модулируемых напряжений трения всегда ниже, чем стационарных. Поэтому диссипация энергии в пограничном слое модулируемого потока уменьшается. Это предопределяет оптимальное максимальное уменьшение (на ΔEdm1(max)) диссипируемой энергии Edm1 модулируемого потока среды от максимального значения Edm1(max) до минимального значения Edm1(min) (Фигура 7).
Продольные плоские волны "каплевидной" формы потоко-формирующего энергетического воздействия ΔPpm1 в потоке нефти в трубопроводе характеризуются предопределенным обратным временем tB1, реализующим предопределенную обратную удлиненную часть указанной "каплевидной" формы закона модулирования lm1(opt), которое больше, чем предопределенное фронтальное время tF1, реализующее предопределенную короткую фронтальную часть "каплевидной" формы указанного закона модулирования в течение периода Tm1 негативного модулирования. Соответственно, средняя величина количества знакопеременных вихрей, генерируемых поверхностью пограничного слоя в течение периода Tm1, отрицательна, так как время tB1 восстановления (увеличения) давления ΔPpm1 в модулируемой волне (от ΔPpm1(min) до ΔPpm1(max)), соответствующее генерации отрицательных вихрей, больше, чем время tF1 уменьшения давления ΔРрm1 в указанной волне (от ΔРрm1(тах) до ΔPpm1(min)). Поэтому модулируемый поток, в течение осредненного по периоду Tm1 модулирования, "катится" по отрицательным вихрям, теряя меньше энергии против турбулентных напряжений трения на поверхности между пограничным слоем и ядром потока. Таким образом, в среднем (в течение периода модулирования Tm1) кинетическая энергия модулируемого потока среды Ekm1 увеличивается. Отмеченный выше анализ, качественно был иллюстрирован, например, результатами визуальных экспериментальных исследований модулируемого всасывания воздушных потоков, выполненных авторами. В модулируемом потоке воздуха образуются продольные "геликоидальные" вихревые структуры. Подобное гидродинамическое явление тем более может происходить в более плотных потоках среды (например, в потоках нефти или воды).
Реламинаризация пограничного слоя и турбулентного ядра потока среды сопровождается подавлением турбулентности в этих областях потока модулируемыми волнами давления. Мелкомасштабные нестационарные вихри, генерируемые поверхностью пограничного слоя, разрушаются вблизи нее; из-за их неустойчивости они не проникают в ядро потока. Это создает благоприятные условия для укрупнения турбулентных частиц в потоке. Увеличение продольной компоненты турбулентной кинетической энергии и образование продольно ориентированных турбулентных структур приводят к уменьшению турбулентной вязкости и "псевдоламинаризации" модулируемого потока. Такое динамическое состояние турбулентности позволяет потоку, в среднем, сохранять крупномасштабную турбулентную структуру и, следовательно, в среднем оптимизировать максимальное увеличение (на ΔЕkm1(mах) для fm1(opt)cor) кинетической энергии модулируемого потока среды от минимальной величины Ekm1(min) до максимальной величины Ekm1(max) (Фигура 8).
Компьютерные моделирования, выполненные авторами, подтверждали, что область поиска, отмеченных выше, оптимальных параметров модулирования, значительно узкая (см. Фигуру 5). Они могут быть обеспечены только возможностями динамической "тонкой" оптимизационной параметрической коррекции (например, частоты модулирования fm1(opt)cor), для "резонансной" структурно-энергетической настройки процесса модулируемого потока среды. В этой узкой "резонансной" области изменения параметров модулирования, происходит униформизация спектра частиц модулируемого потока среды. Продольные "резонансные" движения указанных частиц приводят к существенным структурно-энергетическим изменениям всего потока среды в трубопроводе. Такое структурно-энергетическое состояние потока характеризуется максимальным взаимодействием модулируемой волны давления с потоком среды. При этом реализуется максимальная величина преобразования энергии модулируемой волны давления в энергию потока среды и существенное уменьшение гидродинамического сопротивления, вследствие фундаментальной реструктуризации (продольной анизотропизации) турбулентного ядра и пограничного слоя модулируемого потока среды. Поэтому, чтобы обеспечить существенную минимизацию потребления энергии для транспортировки потока среды, необходимо расходовать на структурно-энергетическую оптимизацию модулируемого потока (указанным негативным модулируемым потоко-формирующим энергетическим воздействием) существенно меньше энергии, чем энергия насоса при постоянном перепаде давления, необходимая для обеспечения того же расхода немодулируемого потока среды. При предопределенных "тонких" оптимальных модуляционных параметрах плоских модулируемых волн давления потоко-формирующего энергетического воздействия, гидродинамическое сопротивление модулируемого потока среды в трубопроводе может достигать значения, близкого к нулю, что теоретически не противоречит законам физики.
В то же время, необходимо отметить, что локальные продольные движения частиц жидкости со знакопеременным ускорением (плоские продольные волны "каплевидной" формы, модулированные потоко-формирующим энергетическим воздействием ΔРрm в потоке нефти) вблизи внутренней поверхности трубопровода, приведут к существенной минимизации адгезионных сил (включая покрытие парафином стенки трубопровода). Кроме этого, в адгезионном слое минимизируются также корозионные и бактериальные процессы. Уменьшение адгезии приводит к росту сохранения продолжительности гладкости внутренней поверхности трубопровода. Применение модулированного потоко-формирующего энергетического воздействия позволяет уменьшать действующую величину модулируемого избыточного давления ΔPpm(act) потока среды в трубопроводе. Поэтому среднедействующее избыточное давление на внутренней стенке трубопровода также существенно (на десятки процентов) будет ниже, чем нормальное избыточное давление, которое используется в современных эксплуатируемых трубопроводах. Продольные колебания элементарных частиц жидкости в модулируемом турбулентном потоке практически не переносит энергию в радиальном направлении к стенке трубопровода, так как интенсивность турбулентных радиальных движений минимальна. Это приводит к уменьшение гидродинамической эррозии на внутренних стенках. Указанные колебания частиц потока среды приводят к непрерывной "очистке" внутренней поверхности трубопровода и предотвращению осаждения примесей с дальнейшим образованием покрытия (например, парафиновое покрытие на внутренней поверхности нефтяного трубопровода). Отмеченное выше, препятствует возможности уменьшения поперечного сечения трубопровода и, следовательно, возможности увеличения потребления энергии, которое могло быть необходимым для поддержания того же расхода потока среды в трубопроводе. Все, отмеченные выше, дополнительные положительные гидродинамические эффекты модулируемой энергии оказывают более благоприятные условия для эксплуатации трубопровода, предопределяют существенный рост продолжительности жизни трубопроводов и дополнительно влияют на минимизацию удельного энергопотребления процесса трубопроводной транспортировки потока среды.
Все отмеченные выше физические явления, которые происходят в турбулентном модулируемом потоке среды в трубопроводе, приводят к существенной оптимизации уменьшения величины коэффициента гидродинамического трения. Его можно уменьшить микропроцессорным управляемым оптимизационным восстановлением (для ERm1(min)cor) более чем в три раза. При этом максимальная величина оптимизационного уменьшения гидродинамического сопротивления модулируемого потока среды (и соответственно, потребления энергии помпой) может превышать пятьдесят процентов от величины гидродинамического сопротивления не модулируемого потока среды с аналогичными параметрами системы транспортировки среды. В то же время (для ERm1(min)cor), максимальная величина оптимизационного уменьшения модулируемого расхода потока среды, также может превышать пятьдесят процентов от величины немодулируемого расхода потока среды. Из описанного выше анализа следует, что удельное потребление энергии процесса трубопроводной транспортировки потока среды можно уменьшить более чем в три раза (при существенном уменьшении времени транспортируемого потока заданного объема среды) - это гидродинамический, сверхпроводящий, энергетический феномен модулируемой энергосберегающей транспортировки потока среды.
Отмеченные выше рассмотренные уникальные возможности нового метода динамической энергосберегающей сверхпроводящей транспортировки потока среды основываются на подробном анализе работы первой динамической подсистемы, показанной на Фигуре 1 и Фигуре 2. В то же время, указанный вариант схемы функциональной структуры динамической системы транспортировки содержит две идентичные динамические подсистемы. Работа, отмеченной выше второй динамической подсистемы, совершенно аналогична работе первой динамической подсистемы. Вторая динамическая подсистема также обеспечивает энергетическую сверхпроводящую (структурно-энергетическую) оптимизацию модулируемого потока среды в трубопроводе с аналогичными модуляционными параметрами: fm2(op()cor=fm1(opt)cor, bm2(opt)=bm1(opt), lm2(opt)=lm1(opt) и αm2(opt)=αm1(opt), соответственно, реализуемую энергосберегающим динамическим модулем 13, связанным со средством потоко-формирующего энергетического воздействия - насос 9 (см. Фигуру 1). При этом также продольные плоские волны "каплевидной" формы, модулируемые потоко-формирующим энергетическим воздействием ΔРрm2 в потоке нефти трубопровода, как независимый предопределенный периодический процесс, непосредственно связан с описанным выше процессом модулирования потоко-формирующим энергетическим воздействием ΔPpm1 в указанном трубопроводе (например, протяженная часть трубопровода 8).
Указанные модулируемые процессы реализуют, одновременно, потоко-формирующие энергетические воздействия ΔPpm1 и ΔРрm2 в указанном трубопроводе. Однако процесс негативного модулирования ΔPpm1 содержит обеспечение предопределенной сравнительной фазы φm1 (заданной в сравнительный момент включения энергосберегающего динамического модуля 5), а процесс негативного модулирования ΔРрm2 содержит обеспечение предопределенной сравнительной фазы φm2 (заданной в сравнительный момент включения энергосберегающего динамического модуля 13). Поэтому реализация модулируемых потоко-формирующих энергетических воздействий ΔPpm1 и ΔРрm2 в указанном трубопроводе в стартовом положении описывает предопределенный сравнительный фазовый сдвиг между указанными модулируемыми потоко-формирующими энергетическими воздействиями: Δφm=φm2-φm1 (Фигура 9). Наличие указанного начального сдвига фаз φm, при одновременном модулировании потоко-формирующих энергетических воздействий ΔPpm1 и ΔРрm2, предопределяет негативную интерференцию волновых энергетических процессов, которая сокращает возможность достижения минимального значения критерия энергетической оптимизации ERms для всех динамических транспортных систем, содержащих две идентичные динамические подсистемы. В начальном стартовом положении, когда начальный фазовый сдвиг Δφm, критерий энергетической оптимизации системы транспортировки первоначально достигает расчетного минимального значения ЕRms(min), существенно отличающегося от практического значения ЕRms(mах) (Фигура 10).
Отмеченная выше работа энергосберегающих динамических модулей 5 и 13 обеспечивает расчетные начальные реальные значения критериев энергетической оптимизации (ERm1(min) и ЕRm2(тin)) и реализует микропроцессорное управляемое оптимизационное восстановление минимального практического значения ЕRm1(min)соr (когда производная dERm1/dt=0) и ЕRm2(min)соr (когда производная dERm2/dt=0) одновременно. Достижение динамической структурно-энергетической оптимизации в турбулентном потоке обеспечивается минимальным практическим значением критерия энергетической оптимизации для всех динамических транспортных систем ERms(min)cor, когда указанные, предопределенные сравнительные фазы φm1 и φm2, автоматически меняются на величину -Δ(Δφm) энергосберегающими динамическими модулями 5 и 13 соответственно, чтобы обеспечивать фазовый сдвиг -Δ(φm(opt)cor, когда величина производной dERms/dt=0 (см. Фигуру 10).
Отмеченный выше процесс (например, в энергосберегающем динамическом модуле 5) автоматического изменения величины предопределенной сравнительной фазы, осуществляется микропроцессорным блоком управления 16. Датчик 24 и датчик 25 контролируют величины технологических параметров: Vf1(act), ρf1(act) и ΔPpm1(act), поступающих в микропроцессорный блок управления 16 для отмеченного выше расчета начальной реальной величины критерия энергетической оптимизации ERm1(min)cor, который (в начальном стартовом положении) соответствует величине ERms(min). Микропроцессорное управляемое оптимизационное восстановление минимального практического значения ERms(min)cor обеспечивает изменение расчетной величины оптимального модуляционного параметра φm1 до корректируемой величины φm1cor путем изменения сигнала Uφm1 (до Uφm1cor), связанного с приводом 22. Сигнал Uφm1 (например) с формой импульса с параметрами: диапазона, знак, форма и длительность, оптимизационно изменяется микропроцессорным блоком управления 16 в течение оптимизационного восстановления минимального практического значения ERms(min)cor. Наличие импульсного сигнала Uφm1 обеспечивает импульс торможения (или ускорения) вращения привода 22 подвижного цилиндрического клапанного элемента 20, который дает импульс оптимизационному восстановлению величины φm1cor. Оптимизационное восстановление величины φm2cor в энергосберегающем динамическом модуле 13, обеспечивается, взаимно и одновременно, с отмеченным выше оптимизационным восстановлением величины φm1cor, которое предопределяет системное оптимизационное восстановление минимального практического (сверхпроводящего) значения ERms(min)cor.
Предложенное (впервые) автоматическое управление фазы негативного модулирования потоко-формирующего энергетического воздействия обеспечивает качественно новую возможность энергоэффективной структурно-энергетической (сверхпроводящей) оптимизации в подобных многонасосных (последовательно или параллельно соединенных с трубопроводом) систем для динамического процесса потока среды путем изменения, как минимум, одного указанного модуляционного параметра в зависимости от изменения, как минимум, одной управляемой технологической характеристики.
Отмеченное выше, предопределяет возможность интенсивного применения предложенного нового метода динамической энергосберегающей сверхпроводящей транспортировки потока среды в различных областях рынка энергопотребляющего поточного трубопроводного транспортирования, охватывающего (например):
транспорт, промышленность, военную технику, окружающую среду, медицину, бытовую технику, а также - включающего различные группы динамических трубопроводных систем транспортировки, общей длиной в десятки миллионов миль (существующих систем, которые будут оснащены энергосберегающими динамическими модулями, и новых динамических систем):
- Динамические локальные трубопроводные системы транспортировки (например: системы очистки и кондиционирования воздуха; тепло- и массообменники; подачи топлива и/или воды; погрузки различных текучих сред; физиологических сред и т.п.);
- Динамические промышленные трубопроводные системы транспортировки (например: различных технологических материалов - гранулированных, порошковых, химических и газовых компонентов и т.п.; нефтяных продуктов; жидких материалов и грунтовых продуктов; топлива; воды; тепло- и массообменники; системы очистки и кондиционирования воздуха; танкеры и т.п.);
- Динамические сетевые трубопроводные системы транспортировки (например: воды, природного газа и т.п.);
- Динамические магистральные трубопроводные системы транспортировки (например: воды, природного газа, сырой нефти, измельченного угля, минералов и руд; и т.п.).
Например, использование нового, улучшенного, динамического энергосберегающего сверхпроводящего процесса трубопроводной транспортировки потока среды в традиционных нефтяных погрузочно/разгрузочных системах обеспечит существенное увеличение (приблизительно на двадцать-сорок процентов) скорости потока нефти (пропускной способности трубопровода) и существенное уменьшение (приблизительно в два-три раза) удельного потребления энергии. При этом будет обеспечиваться существенное уменьшение (приблизительно на тридцать процентов) времени процесса погрузки/разгрузки нефти и стоимости стоянки танкера в терминале, а значит - существенная экономическая и эксплуатационная эффективность портовых терминалов и танкерного флота. Подобное использование энергосберегающего трубопроводного транспортного процесса потока среды в воздушной дозаправке самолетов приведет к аналогичному уменьшению времени дозаправки, потребления энергии, а также - размеров и веса самолетной насосной системы.
Энергосберегающие динамические модули подобных трубопроводных систем транспортировки могут иметь различные схематические, структурные и функциональные решения. Один из возможных вариантов функциональной конструкции клапанного блока энергосберегающего динамического модуля является новый, так называемый, вариант "полый корпус", показанный на Фигуре 2, который может использоваться, как универсальное схематическое решение для производства динамических модулей в различных приложениях. В общем, различные варианты конструкции модулирующего клапанного блока и различные алгоритмы работы компактного интеллектуализированного энергосберегающего динамического модуля описаны подробно, например, в приведенных выше в наших патентах США. В то же время, необходимо отметить, что реализация нового метода динамической энергосберегающей сверхпроводящей транспортировки потока среды в различных приложениях, связана с необходимостью специфических изменений в работе микропроцессорного блока управления, клапанного блока и/или датчиков контроля технологических параметров. При этом указанные выше: короткий выходной участок 7 и длинный входной участок 6 шунтирующего канала модуля, могут быть конструктивно выполнены с возможностью автоматического механического изменения указанных конструктивных углов сопряжения βs и βр, соответственно. Указанные элементы 6 и 7 могут быть выполнены подвижными относительно указанного трубопровода (например, эластичными; гофрированными; жесткими с подвижными элементами крепления и т.п.). Для реализации указанных механических изменений указанные участки 6 и 7 шунтирующего канала модуля могут быть снабжены дополнительными приводами (например, электрическим, электромагнитным, пневматическим, гидравлическим, и т.п.), электрически связанными с указанным микропроцессорным блоком управления 16 (см. Фигура 2). Это обеспечит дополнительную возможность энергосберегающего динамического модуля для автоматической энергетической волновой оптимизации процесса формирования модулируемых волн давления. Кроме того, коммутационные вырезы каналов 19 и 21 указанного клапанного блока 17 должны быть расположены перпендикулярно продольной оси указанного короткого выходного участка 7 для минимизации гидродинамических потерь в нем, в процессе формирования указанной модулируемой волновой энергии.
Отмененный выше микропроцессорный блок управления фукциональной структуры энергосберегающего динамического модуля (например, как блок 16 модуля 5 на Фигуре 2) может включать:
- отмеченную выше, так называемую "Каплевидную модуляционную гидродинамическую модель Релина-Марта", интегрируемую в рабочий алгоритм этого блока, для обеспечения универсальной параметрической функциональности путем автоматической коррекции оптимальных модуляционных параметров, вычисленных с помощью компьютера, с учетом заданных на входе блока новых параметров трубопроводной системы, модулируемого потока среды или/и текущей среды, а также - контролируемых текущих оптимизационных параметров модулируемого потока среды или/и текущей среды;
- дополнительный дискретный вход для установления новых заданных параметров трубопроводной системы, модулируемого потока среды или/и текущей среды;
- дополнительные оптимизационные параметрические входы для установления новых контролируемых текущих оптимизационных параметров модулируемого потока среды или/и текущей среды;
- дополнительные управляющие выходы, которые связаны, например, со спецификой каналов многоканального клапанного блока или/и с дополнительным приводом для движения, отмеченного выше, регулирующего элемента (кольца), для необходимой комплексной коррекции оптимальных модуляционных параметров (компьютерно оцененных) цилиндрических клапанных элементов клапанного блока.
Микропроцессорный блок управления может реализовать различные алгоритмы одно- и многопараметрического оптимизационного управления параметрами модулирования для обеспечения одно- и многопараметрической оптимизации процесса динамической энергосберегающей сверхпроводящей транспортировки потока среды. Для обеспечения специальных технологических требований, можно использовать оптимизационный алгоритм, включающий одновременно поддержание заданного контролируемого действующего значения скорости модулируемого потока среды и обеспечение минимальной величины энергетического отношения ЕRm(min).
Дополнительный контрольный выход, который связан с дополнительным приводом для движения, отмеченного выше, регулирующего элемента (кольца), может быть связан, например, с электромагнитным приводом, обеспечивающим возможность заданного линейного перемещения или заданного углового перемещения регулирующего элемента (кольца), для необходимой комплексной коррекции, отмеченных выше, вычисленных компьютером, оптимальных модуляционных параметров (bm(opt), lm(opt) и αm(opt)) цилиндрического клапанного элемента клапанного блока.
Многоканальный клапанный блок может содержать продольное (последовательное) размещение нескольких секционных поперечных сечений проходных каналов, которые формируются (одновременно, переменно или выборочно, например, подвижным регулирующим элементом) во время вращения подвижного цилиндрического клапанного элемента относительно неподвижного цилиндрического клапанного элемента. Другие возможные варианты функциональной конструкции многоканального клапанного блока энергосберегающего динамического модуля могут содержать параллельное расположение нескольких указанных выше "продольных" одно- или многоканальных переключателей подвижных клапанных пар, включающих подвижные и неподвижные цилиндрические клапанные элементы, а также - собственный привод управления. В некоторых схематических решениях клапанного блока, независимый регулирующий элемент (кольцо) можно исключить. Функциональная роль этого элемента может осуществляться, например, или структурой неподвижного цилиндрического клапанного элемента, который может быть подвижным в продольном или угловом направлениях, или структурой подвижного цилиндрического клапанного элемента, который может быть подвижным в продольном направлении (возможно со своим приводом). При этом выбранные несколько секционных поперечных сечений проходных каналов многоканального клапанного блока могут обеспечивать различный комплекс модуляционных параметров (lm, bm, dm и Тm), для реализации микропроцессорно-управляемого оптимизационного восстановления минимального практического значения ЕRm1(min).
Отмеченные выше различные дополнительные функциональные и технические возможности микропроцессорного блока управления и клапанного блока, могут обеспечивать изменение величины временного отношения αm (как дополнительный предопределенный модуляционный параметр указанного негативного модулирования), в зависимости от изменения величины, как минимум, одной характеристики, связанной с указанным динамическим процессом потока среды, для обеспечения минимальной величины энергетического отношения ERm(min). Такие изменения величины временного отношения, в процессе реализации преопределенного периода Тm указанной "каплевидной" формы указанного закона модулирования, могут включать:
- технические изменения предопределенного фронтального времени tF и обеспечение преопределенного периода Тm указанного негативного модулирования, одновременно;
- технические изменения преопределенного периода Тm указанного негативного модулирования и обеспечение предопределенного фронтального времени, одновременно;
- технические изменения предопределенного фронтального времени tF и преопределенного периода Тm указанного негативного модулирования, одновременно.
Отмеченное выше реализация автоматического управления преопределенной фазы φm негативного модулирования потоко-формирующего энергетического воздействия, может использовать и различные технические решения, например:
- вращение неподвижного цилиндрического клапанного элемента клапанного блока на заданный угол шаговым двигателем;
- вращение корпуса привода подвижного цилиндрического клапанного элемента на заданный угол шаговым двигателем;
- вращение подвижного цилиндрического клапанного элемента на заданный угол шаговым двигателем (или синхронным двигателем), который используется как собственный привод; и т.п.
Отмеченная выше, контролируемое действующее значение указанной модулируемой потоко-формирующей энергии может быть вычислено с использованием, например: контролируемого действующего значения модулируемого давления потока среды, обеспечиваемого указанным средством потоко-формирующего энергетического воздействия (помпой); или контролируемого действующего значения, как минимум, одного энергетического параметра, связанного с величиной потребления энергии средством потоко-формирующего энергетического воздействия (приводом помпы). В то же время, отмеченная выше, контролируемое действующее значение указанной кинетической энергии модулируемого потока среды может быть вычислена с применением, например: контролируемого действующего значения скорости модулируемого потока среды и предопределенного контролируемого значения плотности потока среды; или контролируемого действующего значения скорости модулируемого потока среды и контролируемого действующего значения плотности потока среды.
Отмеченный выше энергосберегающий динамический модуль, который реализует принцип управляемого внутреннего динамического шунтирования рабочих зон насоса, может быть параллельно связан со средством потоко-формирующего энергетического воздействия, включающего только один насос или, компактно, систему многих насосов (параллельно или последовательно соединенных с трубопроводом). В то же время, например, в трубопроводной системе транспортировки воздушного потока можно использовать энергосберегающий динамический модуль, который реализует принцип управляемого внешнего динамического шунтирования выбранного участка модулируемого всасываемого воздушного потока, связанного со всасывающими рабочими зонами указанных средств потоко-формирующего энергетического воздействия. В той же трубопроводной системе транспортировки потока среды можно использовать, одновременно, оба варианта отмеченного выше энергосберегающего динамического модуля, и осуществлять (в обоих этих вариантах) динамическое шунтирование, включающее обеспечение управляемого предопределенного динамического периодического связывания модулируемого всасывающего потока среды с модулируемым шунтирующим потоком среды, реализуемого вблизи указанного модулируемого всасывающего потока среды. Кроме того, новый метод позволяет реализовать один из нескольких основных вариантов указанного негативного модулирования величины потоко-формирующего энергетического воздействия, включающий обеспечение управляемого предопределенного динамического периодического изменения величины, как минимум, одного параметра, динамически связанного с процессом преобразования потребляемой энергии в указанную модулированное потоко-формирующее энергетическое воздействие, осуществляемого в указанном средстве (например, в насосе) потоко-формирующего энергетического воздействия (описанного подробно, например, в отмеченных выше патентах США).
Отмеченное выше сверхэффективное применение предложенного нового метода динамической энергосберегающей сверхпроводящей транспортировки потока среды в динамической системе транспортировки (содержащей две идентичные динамические подсистемы) является примером осуществления сверхпроводящей транспортировки потока среды в комбинации с отмеченным выше независимым предопределенным периодическим процессом, и может включать модулирование величины потоко-формирующего энергетического воздействия дополнительного средства потоко-формирующего энергетического воздействия, непосредственно связанного с указанным модулируемым потоком среды (объект энергетического воздействия) в общем трубопроводе, который служит рабочей зоной воздействия.
В то же время, отмеченный выше новый метод может также энергетически эффективно применяться и в различных других технологичечких приложениях, когда отмеченный выше независимый предопределенный периодический процесс может содержать модулированную величину потоко-формирующего энергетического воздействия, как минимум, одного дополнительного средства потоко-формирующего энергетического воздействия, связанного с указанным модулируемым потоком среды, как минимум, через одну рабочую зону воздействия на поток среды, включающую, как минимум, один объект воздействия потока среды. И, кроме того, отмеченная выше рабочая зона воздействия потока среды может включать, например, как минимум, один перфорированный вход для обеспечения перфорированных потоков среды, а отмеченный выше объект воздействия потока среды может быть, без каких-либо ограничений, например: объектом, с пористой, фильтрующей или конструктивной структурой; пористым объектом, насыщенным средой; или объектом специфического детектирования.
Наглядными примерами подобных технологических применений могут быть, без каких-либо ограничений, разнообразные методы и системы динамической сверхпроводящей энергетической оптимизации перфорированного воздействия потоков среды, которые могут основываться на реализации отмеченного выше нового предложенного метода модулирования. Известная подобная система перфорированного воздействия потоков среды включает, как минимум, один блок воздействия перфорированных потоков среды, содержащий, как минимум, одно средство потоко-формирующего энергетического воздействия, как минимум, один всасывающий трубопровод для потока среды или/и, как минимум, один нагнетающий трубопровод, как минимум, с одной перфорированной частью воздействия. И, кроме того, внешняя поверхность указанной перфорированной части связана, как минимум, с одной рабочей зоной воздействия, включающей, как минимум, один объект воздействия потока среды. Кроме того, отмеченный выше метод энергетической оптимизации (реализуемый, например, с применением, как минимум, одного энергосберегающего динамического модуля) может включать модулирование величины потоко-формирующего энергетического воздействия, как минимум, одного указанного средства, как минимум, одного указанного блока, а также описанные выше оптимизационное изменение величины, как минимум, одного параметра модулирования, в зависимости от изменения величины, как минимум, одной характеристики, связанной с процессом воздействия потоков среды, осуществляемым в рабочей зоне воздействия, для динамической пространственно-временной структурно-энергетической оптимизации, в энергоэффективной манере, указанного процесса воздействия потоков среды.
Отмеченные выше системы динамической сверхпроводящей энергетической оптимизации перфорированного воздействия потоков среды могут применяться в различных технологических приложениях, без каких-либо ограничений, например:
- технология добычи нефти путем динамического форсирования нефти из слоя с пористой структурой (или из нефтяного пласта), с применением динамического многоструйного инжектируемого воздействия перфорированных потоков среды (например, вода, газ или смеси) через перфорированную обшивку инжектируемой скважины для воздействия на рабочую зону пористой среды, насыщенной нефтью (или для воздействия на рабочую зону нефтяного пласта);
- технология добычи нефти путем динамического всасывания нефти из слоя с пористой структурой (или из нефтяного пласта) через перфорированную обшивку производственной скважины, примыкающей к рабочей зоне воздействия;
- технология добычи газа путем динамического всасывания газа из слоя с пористой структурой (или из газового пласта) через перфорированную обшивку производственной скважины, примыкающей к рабочей зоне воздействия;
- технология добычи воды путем динамического всасывания воды из слоя с пористой структурой (или из водяного пласта) через перфорированную обшивку производственной скважины, примыкающей к рабочей зоне воздействия;
- технология добычи урана путем динамического форсирования урана из слоя песчаника с пористой структурой (или руды) с использованием динамического многоструйного инжектируемого воздействия перфорированных потоков среды (например, воды с кислородом) через перфорированную обшивку инжектирующей скважины в направлении рабочей зоны воздействия на пористую среду, насыщенную ураном;
- технология добычи урана путем динамического всасывания урана из слоя песчанника с пористой структурой (или руды) через перфорированную обшивку производственной скважины, примыкающую к рабочей зоне воздействия;
- технология химического катализа веществ с использованием воздействия перфорированных потоков среды на каталитическую рабочую зону воздействия химического реактора;
- технологии очистки и покрытия с использованием воздействия перфорированных потоков среды на подвижный (или неподвижный) объект в рабочей зоне воздействия;
- технология оперативного детектирования с использованием воздействия перфорированных потоков среды на подвижный (или неподвижный) объект воздействия в рабочей зоне воздействия, где одновременно с указанными характеристиками, связанными с процессом воздействия потоков среды, дополнительно контролируют, как минимум, один специфически детектируемый пространственно-геометрический, структурный, физический и/или химический параметр рабочей зоны воздействия, и/или указанного объекта воздействия среды, или части указанного объекта воздействия среды и т.п.
В процессе реализации нового динамического метода энергетической оптимизации в динамических энергосберегающих системах могут применяться указанные технологические характеристики, связанные с процессом воздействия потоков среды, и выбранные из группы, состоящей (без каких-либо ограничений): потребление энергии средством потоко-формирующего энергетического воздействия (например, потребление энергии насосом); давление, температура и/или расход потока среды; пространственно-геометрические, структурные, физические и/или химические параметры рабочей зоны воздействия среды и/или объекта воздействия; энергетические, расходные, скоростные параметры указанного объекта воздействия; динамические энергетические параметры, как минимум, одного иного средства потоко-формирующего энергетического воздействия на указанный объект воздействия (например, потребление энергии иной помпой); а также частота, диапазон, закон и/или сравнительная фаза указанного иного модулируемого потоко-формирующего энергетического воздействия.
Необходимо отметить, что модулируемый перфорированный мощный поток среды - так называемый "внешний" поток (например, вдавливание в потоке воды), и модулируемый перфорированный всасывающий поток среды - так называемый "внутренний" поток (например, выдавливание потока нефти) - в указанной рабочей зоне воздействия потока среды (например, насыщенную нефтью пористую структуру) связаны между собой. Это обеспечивает возможность управления оптимизацией величины предопределенного фазового сдвига между предопределенными сравнительными фазами указанных модуляций указанного внешнего и указанного внутреннего потоков среды, а также - в среднем (в течение периода модулирования Тm), максимальной текучести указанного потока нефти и его максимального расхода.
Кроме того, указанное изменение величины, как минимум, одного параметра негативного модулирования (с применением предложенного автоматического управления фазой продольных плоских волн "каплевидной" формы модулируемого потоко-формирующего энергетического воздействия и критерия энергетической оптимизации) включают, одновременно, обеспечение максимальной эффективности комплексного потоко-формирующего энергетического воздействия на указанный объект воздействия потоков среды и минимальную величину комплексного потребления энергии в течение указанного процесса воздействия потоков среды - сверхпроводящего энергетического режима. Кроме того, сверхпроводящий энергетический режим процесса воздействия потоков среды включает оптимизацию динамически модулируемых турбулентных структур и энергии указанного воздействия потоков среды для обеспечения, в энергоэффективной манере, максимальной динамической энергии указанного воздействия потоков среды на указанный объект воздействия потоков среды, и обеспечения структурно-энергетического "резонансного" отклика системы объекта воздействия среды путем оптимизации динамических параметров указанного модулирования.
Отмеченные выше новые системы динамической сверхпроводящей энергетической оптимизации воздействия перфорируемых потоков среды, реализующие предложенные новые модуляционные принципы энергетической оптимизации процесса энергетического воздействия модулируемых перфорируемых потоков среды, могут обеспечивать следующие качественно новые преимущества, например:
- существенное уменьшение (в два и больше раза) потребления энергии динамическим многоструйным перфорированным воздействием инжектированных потоков среды на рабочую зону воздействия среды, примыкающую к перфорированной части всасывающего (или нагнетающего) трубопровода динамической системы воздействия перфорированных потоков среды;
- существенное уменьшение (больше чем два раза) гидродинамического сопротивления всасывающего (или нагнетающего) трубопровода и его перфорированных каналов;
- существенное уменьшение адгезии потока среды на внутренней поверхности всасывающего (или нагнетающего) трубопровода и перфорированных каналов, что приводит к существенному увеличению их времени жизни;
- динамическое воздействие перфорированных потоков среды на действующую рабочую зону;
- постоянное энергетическое воздействие модулируемыми волнами давления на действующую рабочую зону, которое приводит к движениям элементарных частиц жидкости со знакопеременным ускорением (например, поток нефти в слое с пористой структурой); при этом движение этих частиц приводит к уменьшению гидродинамического сопротивления пор в пористом теле, предотвращает их блокировку (эффективный динамический антиблокировочный процесс), поддерживает поры в открытом состоянии и приводит к уменьшению гидродинамического сопротивления пор; в то же время, движение элементарных частиц жидкости гетерогенного потока среды со знакопеременным ускорением приводит к "разрыхлению" и, следовательно, к увеличению его текучести (например, нефти);
- существенное увеличение (приблизительно в 1,5-2 раза) расхода потока среды в рабочей зоне воздействия (например, нефти или урановой руды), при общем минимальном потреблением энергии - сверхпроводящий энергетический режим;
- существенное увеличение (приблизительно в 1,5-2 раза) скорости вытеснения потока среды из слоя пористой структуры рабочей зоны воздействия (например, нефти или урановой руды);
- более широкие возможности оптимизации технологического процесса (всасывания или вытеснения) с применением управления различных его характеристик для одного или многих действующих перфорированных блоков воздействия потоков среды в системе;
- максимальное использование возможностей эксплуатации традиционных систем воздействия перфорированных потоков среды с дополнительным применением энергосберегающего динамического модуля, реализующего указанную модуляцию величины потоко-формирующего энергетического воздействия, как минимум, одного средства, как минимум, одного указанного перфорированного блока воздействия потоками среды.
Другими наглядными примерами подобных технологических приложений могут быть, без каких-либо ограничений, различные методы и системы динамической сверхпроводящей энергетической оптимизации обработки/фильтрации, которые основаны на реализации, отмеченного выше, нового предложенного метода модулирования. Известная подобная система фильтрации для обеспечения процесса обработки/фильтрации потока несущей среды (например, система фильтрации загрязненной воды) содержит, как минимум, одно средство потоко-формирующего энергетического воздействия (например, насос) во всасывающем или/и нагнетающем трубопроводах, и, как минимум, один блок для обработки/фильтрации. При этом указанный выше метод энергетической оптимизации (реализующийся, например, с использованием, как минимум, одного энергосберегающего динамического модуля), может содержать модуляцию величины потоко-формирующего энергетического воздействия, как минимум, одного средства, а также - отмеченное выше - оптимизационное изменение величины, как минимум, одного параметра модулирования, в зависимости от изменения величины, как минимум, одной динамической характеристики процесса обработки/фильтрации для динамической структурно-энергетической оптимизации, в энергоэффективной манере, процесса обработки/фильтрации потока несущей среды.
Разработка, отмеченного выше, нового класса различных динамических энергосберегающих сверхпроводящих систем для обработки/фильтрации потока среды, которые обеспечат динамическую сверхпроводящую энергетическую оптимизацию процесса обработки/фильтрации потока несущей среды, может применяться в различных технологических приложениях, без каких-либо ограничений, например, в промышленности обработки/фильтрации воды:
- динамические водяные микропористые системы фильтрации под давлением;
- динамические водяные экранные системы фильтрации под давлением;
- динамические водяные ультратонкие системы фильтрации под давлением;
- динамические системы ГАУ (гранулированный активированный уголь) для обработки воды под давлением;
- динамические водяные гравитационные системы фильтрации;
- динамические управляемые воздушные системы (для очистки водяного фильтрующего блока).
Кроме того, подобные динамические сверхпроводящие энергосберегающие системы обработки/фильтрации потока среды могут быть разработаны также и для различных прецезионных технологических процессов обработки/фильтрации, без каких-либо ограничений, например: жидкостного, картриджного, мембраной фильтрации, обратного осмоса, углеродного адсорбирования, ультрафиолетовой и химической дезинфекции, а также - для аэробных биологических технологических процессов.
Оптимизационные изменения величины, как минимум, одного параметра указанного негативного модулирования (с применением предложенного автоматического управления фазы, продольных плоских волн "каплевидной" формы модулируемого потоко-формирующего энергетического воздействия, и критерия энергетической оптимизации) включают, одновременно, обеспечение режима максимальной эффективности (энергетическое и фильтрующее качество) комплексного потоко-формирующего энергетического воздействия несущей среды на указанный блок обработки/фильтрации (минимальная величина комплексного потребления энергии в течение процесса обработки/фильтрации потока несущей среды) и максимального расхода потока несущей среды (обработки/фильтрации) - сверхпроводящий энергетический режим потока обработки/фильтрации. Следует отметить, что указанный модулируемый несущий проток загрязненной воды и модулируемый отработанный/фильтруемый поток воды связаны между собой в блоке обработки/фильтрации и управляются независимо. Это создает возможность оптимизационного управления величиной предопределенного сравнительного фазового сдвига между предопределенными сравнительными фазами указанных модуляций потоков загрязненной воды и обработанной/отфильтрованной воды и обеспечивает, в среднем (в течение периода модулирования Тm), максимальную объемную текучесть указанного потока воды в блоке обработки/фильтрации и максимальный расход отработанного/фильтруемого потока.
При этом продольные плоские волны "каплевидной" формы модулируемого потоко-формирующего энергетического воздействия распространяются через указанные различные потоки несущей среды в трубопроводе и через структуру блока обработки/фильтрации. Это обеспечивает структурно-энергетический 'резонансный' отклик объекта на воздействие среды - структуры блока обработки/фильтрации путем оптимизации динамических параметров указанного модулирования и предопределяет минимизацию ее блокирования в соответствии с тем, что впервые новый динамический антиблокировочный механизм обеспечивает, без каких-либо ограничений, например:
- непрерывное предотвращение формирования устойчивого осадка на фильтре и поддержание "динамически-дышащей" структуры осадка, накапливаемого на структуре блока обработки/фильтрации в разрыхленной пористой среде;
- минимизацию вероятности кластерного образования и минимизацию частиц жидкости, осажденных на указанной структуре блока обработки/фильтрации;
- минимизацию вероятности осаждения частиц примеси внутри пористой структуры блока обработки/фильтрации и увеличение текучести жидкости через указанную структуру;
- минимизацию вероятности начала образования однослойного кластера на поверхности структуры блока обработки/фильтрации.
Отмеченные выше новые динамические энергосберегающие сверхпроводящие системы обработки/фильтрации потока среды, реализующие предложенные новые модуляционные принципы энергетической оптимизации различных процессов обработки/фильтрации потока несущей среды, будут обеспечивать следующие качественно новые преимущества, например:
- существенно лучшее качество процесса обработки/фильтрации, по сравнению с любой существующей современной технологией в этой области;
- существенное увеличение (приблизительно в два раза) производительности обработки/фильтрации потока среды для любых существующих и новых динамических систем обработки/фильтрации;
- существенное уменьшение (приблизительно в 1.5-3.0 раза) удельного энергопотребления процесса обработки/ фильтрации;
- улучшение эксплуатационных характеристик любой существующей и новых динамических систем обработки/ фильтрации потока среды, включающих минимизацию закупорки каналов системы обработки/фильтрации (т.е. увеличение продолжительности срока службы трубопроводов, забивающихся в процессе их эксплуатации);
- новые динамические возможности микроструктурного влияния на механизмы блокирования внутри структуры системы блока обработки/фильтрации - новые динамические механизмы антиблокирования;
- создание качественно новых динамических возможностей для автоматической многопараметрической оптимизации динамической фильтрации потока среды, процессов обработки и очистки;
- локальные продольные движения частиц потока несущей среды со знакопеременным ускорением вблизи внутренней поверхности трубопровода, что будет приводить к существенной минимизации адгезии, коррозионных и бактериальных процессов внутри всех компонентов системы обработки/фильтрации, которые предопределяют дополнительные возможности улучшения качества обработки/фильтрации потока среды;
- существенное уменьшение давления на внутренней поверхности трубопровода и компонентов системы обработки/фильтрации, что будет обеспечивать более благоприятный режим эксплуатации динамических систем обработки/фильтрации;
- существенное увеличение срока эксплуатации динамических систем обработки/фильтрации;
- существенное уменьшение удельных затрат в сочетании с процессом очистки потока среды.
Указанные факторы предопределяют более эффективные энергетические и эксплуатационные характеристики новых динамических сверхпроводяших энергосберегающих систем для обработки/фильтрации потока среды, которые революционизируют широкий диапазон приложений систем для обработки/фильтрации в многочисленных областях. Более того, возможность создания различных компактных современных динамических компонентов (энергосберегающих динамических модулей) позволяет снабжать ими существующие системы для обработки/фильтрации, а также - использовать их в новых разрабатываемых динамических системах.
Отмеченные выше новые наглядные примеры двух крупных новых классов различных динамических энергосберегающих технологических систем сверхпроводящих потоков среды, это только малая часть широкой классификационной группы новых разрабатываемых подобных динамических энергосберегающих систем, которые обеспечивают "сверхэффективное" динамическое воздействие потока на объект, и охватывают, без каких-либо ограничений, например:
- динамические вакуумные очистительные системы (ручные, встроенные, механизированные и специальные, например - подводные);
- динамические медицинские всасывающие системы и аппараты (хирургические, зубные, для липосакции, тестирующие, гинекологические, для массажных процедур и т.п.);
- динамические насосные системы (обработки или очистки поверхностей объекта);
- динамические системы для селекции малых объектов;
- динамические системы для всасывания концентрированных минералов (золото, уголь, уран и т.п.);
- динамические вакуумные системы для приготовления смесей;
- динамические системы напыления;
- динамические системы для специального назначения (динамические всасывающие/нагнетающие системы для детектирования компонентов на движущихся объектах) и т.п.
Другим комплексом наглядных примеров подобных технологических применений могут быть, без каких-либо ограничений, различные методы и системы динамических энергосберегающих сверхпроводящих теплопередающих потоков, которые основаны на реализации отмеченного выше нового предложенного модуляционного метода. Эти новые динамические системы реализуют комплекс двух энергетических оптмизационных задач: отмеченную выше динамическую трубопроводную транспортировку потока среды и динамическое воздействие потока среды на объект - тепловой пограничный слой указанного динамического потока среды. Известные подобные потоки теплопередающих систем для обеспечения процесса теплообмена (например, теплопередающая система для сжижения натурально газа) содержат, например, как минимум, одно средство потоко-формирующего энергетического воздействия (например, насос); как минимум, один подающий трубопровод и один отводящий трубопровод для транспортировки потока теплоносителя; как минимум, один теплообменник, включающий, как минимум, один канал теплообмена для внутренней передачи тепла потоку среды, расположенный внутри корпуса теплообменника, содержащего внешнюю теплопередающую среду, обтекающую снаружи указанный канал. При этом отмеченный выше метод энергетической оптимизации указанного процесса теплообмена (реализуемый, например, с использованием, как минимум, одного энергосберегающего динамического модуля) может содержать модуляцию величины указанного потоко-формирующего энергетического воздействия, как минимум, одного средства, а также - оптимизационные изменения величины, как минимум, одного параметра указанного модулирования, в зависимости от изменения величины, как минимум, одной технологической характеристики, связанной с энергетической эффективностью процесса теплообмена, для динамической структурно-энергетической оптимизации, в энергоэффективной манере, процесса теплообмена.
Разработка отмеченного выше нового класса различных динамических энергосберегающих сверхпроводящих теплопередающих систем, которые будут обеспечивать динамическую сверхпроводящую энергетическую оптимизацию процесса теплообмена потока среды, может быть использована в различных технологических приложениях без каких-либо ограничений, например, в:
- теплообменных процессах в химической промышленности (рафинация нефти и обработка нефтепродуктов);
- генерации пара в промышленных процессах и в производстве электричества;
- системах ядерных реакторов;
- криогенной технике (например, низкотемпературное разделение газов и сжижение газов);
- теплообмене при испарении жидкости;
- теплообмене при конденсации пара;
- пищевой промышленности (например, для пастеризации молока и процессов консервирования продуктов);
- самолетах и автомобилях;
- нагреве, вентиляции, кондиционировании и охлаждении воздуха, и т.п.
В процессе реализации нового динамического метода энергетической оптимизации в отмеченной выше, динамической энергосберегающей сверхпроводящей теплопередающей системе, используются указанные технологические характеристики, связанные с энергетической эффективностью указанного процесса теплообмена, и выбранные из группы, состоящей (без каких-либо ограничений): потребление энергии указанным средством потоко-формирующего энергетического воздействия (например, потребление энергии насосом); динамические энергетические параметры, как минимум, одного дополнительного средства потоко-формирующего энергетического воздействия (например, потребление энергии другим насосом в двухканальном теплообменнике), а также - частота, амплитуда, закон или/и сравнительная фаза указанного другого дополнительного потоко-формирующего энергетического воздействия, например, внутри двухканального теплообменника; температура указанного внутреннего теплоносителя; температура указанного внешнего теплоносителя; удельный расход внутреннего теплоносителя; удельный расход внешнего теплоносителя; удельный поток тепла.
При реализации метода энергетической оптимизации, где в качестве теплообменника используется двухканальный теплообменник (например, двухтрубный теплообменник), указанное модулирование величины, как минимум, одного внутреннего потоко-формирующего энергетического воздействия, и указанное дополнительное модулирование величины, как минимум, одного внешнего потоко-формирующего энергетического воздействия, будут обеспечиваться одновременно. При этом указанных оба модулирования включают обеспечение сдвига сравнительной фазы, который может меняться изменением фазы, как минимум, одного модулирования указанного процесса теплообмена в зависимости от изменения величины, как минимум, одной отмеченной выше характеристики. В этом случае, указанное дополнительное модулирование величины, как минимум, одного внешнего потоко-формирующего энергетического воздействия теплоносителя является независимым предопределенным периодическим процессом, конструктивно связанным с внутренним модулируемым потоком теплоносителя. Возможность оптимизационного управления предопределенным сравнительным фазовым сдвигом между предопределенными сравнительными фазами указанных модуляций указанного внутреннего и указанного внешнего потоков среды теплообмена будет обеспечивать, в среднем (в течение периода модулирования Тm), минимальную величину толщины тепловых пограничных слоев вдоль всей поверхности теплообмена, а также - максимальную величину теплового потока (например, на поверхности двухтрубного указанного двухканального теплообменника).
Кроме того, указанное изменение величины, как минимум, одного параметра указанного негативного модулирования (с использованием предложенного автоматического управления фазы, продольных плоских волн "каплевидной" формы потоко-формирующего энергетического воздействия и критерия энергетической ортимизации) включает, одновременно, обеспечение режима максимальной величины теплового потока и минимальной величины комплексного энергопотребления в течение процесса теплообмена - сверхпроводящий энергетический режим теплообмена. При этом продольные плоские волны "каплевидной" формы, модулируемого потоко-формирующего энергетического воздействия распространяются через указанный трубный теплообменник (двухтрубный) и обеспечивают структурно-энергетический "резонансный" отклик объекта воздействия среды - "двойной тепловой пограничный слой" указанных динамических потоков сред за счет оптимизации динамических параметров указанных модуляций.
Отмеченные выше новые динамические энергосберегающие теплопередающие системы, реализующие предложенный новый модуляционный принцип энергетической оптимизации различных процессов теплообмена, обеспечат следующие качественно новые преимущества, например:
- непрерывное действие механизма роста гидродинамической неустойчивости поверхности пограничного слоя турбулентного теплообмена (новый метод динамического управления пограничным слоем);
- образование "стоячей волны" давления ("виртуальный турбулизатор"), которая приводит к динамической волновой деформации структуры гидродинамического и теплового пограничных слоев и к минимизации их толщины;
- минимизацию энергетических потерь в потоках теплоносителя, благодаря модулируемой оптимизации параметров элементарных частиц жидкости (например: размер, плотность, вязкость и их амплитудно-частотные характеристики);
- "резонанс" энергетической самоорганизации турбулентных структур в потоках теплоносителя;
- максимальную величину турбулентного потока тепла на стенках канала теплообменника;
- существенную минимизацию механизмов загрязнения теплопередающей поверхности (например: кристаллизации, седиментации, коксования, коррозии и т.п.), а также - уменьшение адгезионных и бактериальных воздействий на теплопередающую поверхность;
- существенное увеличение коэффициента теплоотдачи на теплопередающей поверхности;
- уменьшение необходимого расхода теплоносителей (внутреннего и внешнего) и таким образом - уменьшение потребление энергии помпой;
- существенное уменьшение удельных энергозатрат на циркуляцию теплоносителя в теплообменнике;
- существенное увеличение величины скорости процесса испарения процесса теплообмена потока жидкости;
- существенное увеличение величины скорости теплообмена потока газа в процессе сжижения;
- существенное увеличение величины коэффициента теплоотдачи в процессах испарения и конденсации, например, в системах кондиционирования воздуха;
- существенное уменьшение размеров и веса теплопередающих систем и систем кондиционирования воздуха;
- увеличение времени жизни теплопередающих систем и систем кондиционирования воздуха и т.п.
Отмеченные выше факторы предопределяют более эффективные энергетические и эксплуатационные характеристики новых динамических энергосберегающих сверхпроводящих теплопередающих систем, которые позволят революционизировать широкий класс приложений в различных областях теплообмена. Более того, возможность создания различных компактных современных динамических компонентов (энергосберегающих динамических модулей) также позволит переоснащать ими существующие теплопередающие системы, а также - применять их во вновь созданных динамических теплопередающих системах.
Другие наглядные примеры новых разрабатываемых динамических энергосберегающих сверхпроводящих (потоков среды) технологических систем включают широкую классификационную группу нового класса различных подобных энергосберегающих систем, которые обеспечивают "суперэффективную" пространственную структуру внешней рабочей зоны потока и охватывают, без каких-либо ограничений, например:
- динамические системы горения для различных видов двигателей (двигатели внутреннего сгорания, турбореактивные двигатели, реактивные двигатели и т.п.);
- динамические системы горения для различных видов печей (промышленные, домашние и специального назначения);
- динамические системы газовых турбин для производства электроэнергии;
- динамические системы дозирования (управление химических реакций в различных технологических процессах);
- динамические системы дозирования для специального назначения (плазменные системы для напыления материалов, аэро- и гидроакустические генераторы и т.п.).
Примером подобных технологических применений могут быть, без каких-либо ограничений, различные методы и системы динамического энергосберегающего сверхпроводящего потока горения, которые основаны на реализации, отмеченного выше, нового предложенного модуляционного метода. Эти новые динамические системы реализуют комплекс двух оптимизационных задач: отмеченную выше динамическую трубопроводную транспортировку потока среды и динамическое пространственное структурирование рабочей зоны горения (внешняя зона потока за пределами трубопровода). Известная подобная система горения потока содержит, например, как минимум, одно средство не инжектируемого и/или инжектируемого (или, как минимум, один компонент горючего) потоко-формирующего энергетического воздействия (насоса); как минимум, один всасывающий трубопровод и, как минимум, один нагнетающий трубопровод для транспортировки указанного потока горючего (или, как минимум, одного компонента горючего) в, как минимум, одну рабочую зону горения. При этом отмеченный выше метод энергетической оптимизации указанного процесса горения (реализующегося, например, с использованием отмеченного выше энергосберегающего динамического модуля) может содержать модуляцию величины указанного потоко-формирующего энергетического воздействия, как минимум, одного средства, а также - отмеченное выше оптимизационное изменение величины, как минимум, одного параметра указанного модулирования, в зависимости от изменения величины, как минимум, одной технологической характеристики, связанной с процессом горения потока, реализуемого в указанной зоне горения, для динамической структурно-энергетической оптимизации, в энергоэффективной манере процесса горения потока.
В процессе реализации нового динамического метода энергетической оптимизации, в отмеченной выше системе динамического энергосберегающего сверхпроводящего потока горения можно использовать технологические характеристики, связанные с энергетической эффективностью указанного процесса горения потока, и выбранные из группы, состоящей (без каких-либо ограничений): потребление энергии указанным средством потоко-формирующего энергетического воздействия (например, потребление энергии насосом); динамические энергетические параметры, как минимум, одного дополнительного средства потоко-формирующего энергетического воздействия, а также - частота, амплитуда, закон и/или сравнительная фаза указанного другого дополнительного потоко-формирующего энергетического воздействия; давление, температура и расход указанной не инжектируемой и/или инжектируемой, как минимум, одной компоненты горючего (или топлива) потока; топливная бесприместность (или горючего); момент, продолжительность и закон инжектирования, как минимум, одной компоненты инжектируемого топлива (или горючего); энергетические параметры, момент, продолжительность и закон воспламенения компонентов топлива (горючего) в указанной камере сгорания; пространственно-временные параметры пламени; скорость распространения пламени; температура воспламенения топлива; степень сгорания; и физические и/или химические параметры выхлопных продуктов сгорания (в основном, например, углекислого газа, ядовитых газов и воды) и т.п.
В таких случаях, реализация метода энергетической оптимизации, например, процесса периодического инжектирования (в указанной зоне горения) горючего (или компонента топлива) является независимым предопределенным периодическим процессом, конструктивно связанным с модулируемым потоком горючего (или компонентов топлива) в трубопроводе. При этом указанные оба динамических процесса включают обеспечение предопределенного сравнительного фазового сдвига между предопределенными фазами указанного модулирования и указанного периодического инжектирования, который может быть изменен путем изменений фазы указанного модулирования трубопроводного потока горючего (или компонентов топлива) в течение указанного процесса горения потока, в зависимости от изменения величины, как минимум, одной отмеченной выше характеристики. Возможность оптимизационного управления указанным предопределенным сравнительным фазовым сдвигом позволяет устанавливать и поддерживать, в среднем (в течение периода модулирования Тm), динамическое сверхпроводящее энергосберегающее состояние пространственной структуры потока топлива (или компонента топлива) в рабочей зоне.
Кроме того, указанное изменение величины, как минимум, одного параметра негативного модулирования (с использованием предложенного автоматического фазового управления, продольных плоских волн "каплевидной" формы модулируемого потоко-формирующего энергетического воздействия, и критерия энергетической оптимизации) включает одновременное обеспечение режима максимальной величины теплоты сгорания и минимальной величины расхода компонента топлива (или горючего) во время указанного процесса горения потока - сверхпроводящий энергопреобразовательный режим горения потока. При этом модулирование потока топливной смеси в указанном нагнетающем трубопроводе приводит к равномерному распределению компонентов топлива по всему поперечному сечению потока топливной смеси. Инжектирование модулируемого топливного потока в указанную рабочую зону горения делает благоприятным условия его горения с существенной интенсификацией модулированного процесса горения, обеспечивающего более высокую степень сгорания топлива, а также - минимизацию длины пламени. При этом продольные плоские волны "каплевидной" формы модулируемого потоко-формирующего энергетического воздействия распространяются через трубопровод системы горения и указанную зону горения и тем самым обеспечивают структурно-энергетический "резонансный" отклик всей структуры объекта воздействия. Указанный структурно-энергетический "резонансный" отклик турбулентной структуры и геометрия динамической пространственно-временной рабочей зоны горения, будут обеспечивать, в энергоэффективной манере, максимальную скорость и максимальное сгорание компонента топлива (или горючего), которые покрывают все фазы горения (включая ламинарную и турбулентную) процесса горения.
В различных случаях реализации метода энергетической оптимизации, указанное модулирование может включать внешний процесс модулирования, который реализует принцип внутреннего динамического шунтирования выбранного участка указанного всасывающего трубопровода с горючим, и обеспечивает модуляционное связывание внутренней полости всасывающего трубопровода с, как минимум, одним не инжектируемым и/или инжектируемым компонентом топлива (или горючего), одновременно, для оптимизации дозирования и динамического пространственно-временного смешивания указанных компонентов топлива и транспортируемого потока горючего (или, как минимум, одной компоненты топлива) в указанных всасывающем и нагнетающем трубопроводах. Кроме того, вместе с указанным внутренним процессом модулирования можно использовать, одновременно, и внешний процесс модулирования. При этом указанное зависимое внешнее модулирование реализует принцип внешнего динамического шунтирования выбранного участка указанного всасывающего трубопровода и обеспечивает модулируемое связывание внутренней полости всасывающего трубопровода, как минимум, с одним не инжектируемым и/или инжектируемым компонентом топлива (или горючего), одновременно, для двойной оптимизации дозирования и динамического пространственно-временного смешивания различных горючих компонентов (или горючего), и указанной транспортировки потока горючего (или, как минимум, одного компонента топлива) в указанных всасывающем и нагнетающем трубопроводах. При этом указанный внешний процесс модулирования может включать обеспечение предопределенного, как минимум, одного параметра указанного внешнего модулирования, выбранного из группы, состоящей из: частоты, диапазона, закона и сравнительного фазового сдвига указанного зависимого модулирования, содержащего внешний модуляционный дискретный вход и оптимизационный параметрический вход. Внешний процесс модулирования включает обеспечение предопределенного сравнительного фазового сдвига для настройки момента инжектирования, как минимум, одного инжектируемого горючего компонента (или горючего) в течение указанного процесса горения, или обеспечение предопределенного сравнительного фазового сдвига для указанного внутреннего процесса модулирования в течение процесса горения.
Отмеченные выше новые динамические энергосберегающие сверхпроводящие системы горения потока, реализующие предложенные новые модуляционные принципы энергетической оптимизации различных процессов горения потока, будут обеспечивать следующие качественно новые преимущества, например:
- непрерывное действие механизма роста гидродинамической неустойчивости элементарных частиц жидкости в турбулентном потоке и пламени;
- более высокую степень сгорания топлива;
- более эффективное горение трудносгораемого топлива;
- оптимальную структуру турбулентного пламени, соответствующую максимальной величине излучаемого потока тепла;
- минимизацию длины пламени;
- минимизацию расхода горючего;
- существенную минимизацию выделения СО и Nox;
- уменьшение длины линера форсунки;
- уменьшение размеров камеры сгорания и т.п.
Указанные факторы предопределяют большую эффективность энергетических и эксплуатационных характеристик новых динамических энергосберегающих сверхпроводящих систем горения потока, которые будут революционизировать широкий диапазон приложений в многочисленных областях промышленности. Более того, возможность создания различных компактных современных динамических компонентов (энергосберегающих динамических модулей), также позволит снабжать ими существующие системы горения также, как и использовать их во вновь создаваемых динамических системах горения потока.
Примерами использования вновь создаваемых динамических энергосберегающих сверхпроводящих систем горения потока, покрывающих, без каких-либо ограничений, являются области, например: системы крекинга и коксования; воздуходувки; газовые печи и стеклянные печи; процессы теплообмена для рафинации нефти в нефтехимической промышленности; самолетные и ракетные системы (турбореактивные и реактивные двигатели); процессы генерации пара для производства электричества; системы дозирования специального назначения (например, плазменные системы для напыления различных материалов, аэро- и гидроакустические генераторы); паровые котлы и бытовые нагревательные системы и т.п.
Интересными примерами подобных динамических систем могут быть, без каких-либо ограничений, разнообразные системы динамического энергосберегающего сверхпроводящего потока двигателей внутреннего сгорания, которые основаны на реализации, отмеченного выше, нового предложенного модуляционного метода. Эти новые динамические системы реализуют комплекс двух энергетических оптимизационных задач: отмеченной выше динамической трубопроводной транспортировки потока среды и динамического пространственного структурирования потока среды в камере сгорания цилиндрического блока двигателя (внешняя зона потока за пределами трубопровода). Известные подобные системы в двигателе внутреннего сгорания содержат, например, как минимум, одно средство инжектирующего потоко-формирующего энергетического воздействия (насос); как минимум, один всасывающий и, как минимум, один нагнетающий трубопроводы для транспортировки указанного топливного потока; как минимум, один цилиндрический блок, включающий, как минимум, один клапан, инжектирующий горючее, для настройки момента времени, длительности и закона инжектирования горючего в, как минимум, одну камеру сгорания указанного цилиндрического блока, как минимум, с одним подвижным поршнем; и элементы зажигания для регулирования энергетических параметров, таких как момент, продолжительность и закон зажигания инжектируемого топлива в указанной камере сгорания. При этом отмеченный выше метод динамической энергетической оптимизации указанного процесса (реализуемый, например, с использованием, как минимум, одного отмеченного выше энергосберегающего динамического модуля) может содержать модуляцию величины, как минимум, одного указаного потоко-формирующего энергетического воздействия, как минимум, одного указанного средства, а также - отмеченные выше оптимизационные изменения величины, как минимум, одного параметра указанного модулирования, в зависимости от изменения величины, как минимум, одной технологической характеристики, связанной с энергетическим преобразованием, реализуемым в указанной камере сгорания цилиндрического блока двигателя, для динамической пространственно-временной структурно-энергетической оптимизации, в энергоэффективной манере, указанного процесса преобразования энергии.
В процессе реализации нового динамического метода энергетической оптимизации в описанном выше динамическом энергосберегающем сверхпроводящем потоке в системе двигателя внутреннего сгорания можно использовать указанные технологические характеристики, связанные с энергетической эффективностью указанного процесса энергетического преобразования, и выбираемые из группы, состоящей из (без каких-либо ограничений): энергопотребления указанных средств инжектирования потоко-формирующего энергетического воздействия (потребление энергии насосом); температуры и расхода инжектируемого потока горючего; температуры в указанной камере сгорания; момента, продолжительности и закона инжектирования; указанных энергетических параметров, таких как момент, продолжительность и закон зажигания инжектируемого горючего; скорости указанного подвижного поршня; физических и/или химических параметров выхлопных продуктов сгорания (в основном, например, углекислого газа, ядовитых газов и воды) и т.п.
В этих случаях реализации метода энергетической оптимизации, например, процесс модулируемого периодического инжектирования потока горючего (в указанную камеру сгорания цилиндрического блока двигателя) является независимым предопределенным периодическим процессом, конструктивно связанным с модулируемым потоком горючего в трубопроводе. Другим независимым предопределенным периодическим процессом, который конструктивно связан с модулируемым потоком горючего в трубопроводе, может являться периодический процесс зажигания инжектируемого горючего. При этом указанные три динамических процесса обеспечивают предопределенный сравнительный фазовый сдвиг между предопределенными фазами модулирования потока горючего в трубопроводе, модулирования периодического инжектирования потока горючего и модулирования указанного зажигания горючего, соответственно, который может изменяться путем изменения фазы указанного модулирования в течение процесса энергетического преобразования потока горючего, в зависимости от изменения величины, как минимум, одной отмеченной выше характеристики. Указанное изменение фазы указанного модулирования обеспечивает предопределенный сранительной фазовый сдвиг для настройки указанного момента инжектирования горючего и указанного момента зажигания горючего, одновременно с продольными плоскими волнами "каплевидной" формы потоко-формирующего энергетического воздействия потока горючего. Возможность оптимизационного управления указанных предопределенных сравнительных фазовых сдвигов позволяет устанавливать и поддерживать, в среднем (в течение периода модулирования Тm), динамическое сверхпроводящее энергосберегающее состояние пространственной структуры потока горючего в укзанной камере сгорания цилиндрического блока двигателя.
Кроме этого, указанное изменение, как минимум, одного параметра указанного негативного модулирования (с использованием предложенного автоматического фазового управления, продольных плоских волн "каплевидной" формы, модулируемого потоко-формирующего энергетического воздействия, и критерия энергетической оптимизации) включает, одновременно, обеспечение режима максимальной величины скорости указанного подвижного поршня и минимальной величины потребления топлива указанным двигателем внутреннего сгорания, - сверхпроводящего энергетического режима. При этом продольные плоские волны "каплевидной" формы модулируемого потоко-формирующего энергетического воздействия распространяются через указанную систему двигателя внутреннего сгорания (указанные трубопроводы потока горючего и камеру сгорания потока горючего цилиндрического блока двигателя) и обеспечивают структурно-энергетический "резонансный" отклик всей структуры объекта воздействия путем оптимизациии динамических параметров указаннного модулирования потока горючего. При этом в процессе сжатия объема модулируемого потока горючего элементарные частицы топливной смеси разрушаются почти до молекулярного уровня. Интенсивность хаотического турбулентного движения частиц существенно увеличивается, что приводит к увеличению интенсивности перемешивания и к обеспечению равномерного распределения смеси (и, как следствие, - существенному уменьшению распределенной объемной вязкости) по всему объему указанной камеры сгорания. Это приводит к существенному уменьшению времени приготовления топливной смеси в процессе указанного сжатия и к обеспечению благоприятных условий для минимизации времени горения указанного процесса горения. Указанный структурно-энергетический "резонансный" отклик турбулентной структуры и геометрия динамического пространственно-временного инжектирования горючего в рабочей зоне горения в камере сгорания двигателя внутреннего сгорания будут обеспечивать, в энергоэффективной высокотемпературно-скоростной манере, максимальную скорость и максимальное полное инжектирование потока горючего в камере сгорания, охватывающего все фазы горения (включая ламинарное и турбулентное горение).
В различных случаях реализации метода энергетической оптимизации, указанное модулирование может включать так называемый процесс внешнего модулирования, который реализует принцип управляемого внешнего динамического шунтирования выбранного участка указанного всасывающего трубопровода, и обеспечивает модулированное связывание внутренней полости всасывающего трубопровода, как минимум, с одним инжектируемым компонентом смеси для одновременной оптимизации дозирования и динамического пространственно-временного перемешивания различных указанных топливных компонентов, и транспортировки потока горючего в указанном всасывающем и нагнетающем трубопроводах.
Отмеченные выше факторы предопределяют более эффективные энергетические, эксплуатационные и экологические характеристики новых динамических систем двигателя внутреннего сгорания с энергосберегающими сверхпроводящими потоками, которые позволят революционизировать широкий диапазон приложений в многочисленных областях промышленности.
Другие интересные демонстрирующие примеры вновь созданных динамических энергосберегающих сверхпроводящих технологических систем потоков среды включают следующие три широкие классификационные группы нового класса различных подобных энергосберегающих систем, без каких-либо ограничений, например:
- динамическая, так называемая "структурно-связанная" турбина, турбореактивный или реактивный двигатели для различных высокоскоростных аппаратов (самолетов, вертолетов, ракет, реактивных машин, спортивных машин, лодок, кораблей, подводных лодок и т.п.); или динамические "структурно-связанные" системы двигателей специального назначения, которые обеспечат динамическую энергосберегающую сверхпроводящую транспортировку объекта потоком среды в указанной динамической "структурно-связанной" системе;
- динамические, так называемые "поверхностно-энергетические" системы, которые структурно реализуют принцип так называемых "дышащих поверхностей" на структурных частях корпусов указанных различных высокоскоростных аппаратов; или динамические "поверхностно-энергетические" системы, которые структурно реализуют принцип аэро- или гидродинамических поверхностно-распределенных управляемых, так называемых, "динамических рулей" на крыльях или хвостовых оперениях указанных различных высокоскоростных аппаратов для обеспечения динамических "суперэффективных" аэро- или гидродинамических характеристик указанных "поверхностно-энергетических" систем и т.п.
- различные динамические энергосберегающие сверхпроводящие "взрывные" системы, которые реализуют "суперэффективные" аэро- или гидродинамические характеристики динамического воздействия потока среды (пространственные, ствольные или специальные) на объект, как заявлено, например, в Патенте США №7556455 (2009) - А.Релин.
В этих случаях реализации метода энергетической оптимизации, отмеченные выше независимые предопределенные периодические процессы могут включать практически все отмеченные выше варианты (непосредственно связанный с указанным основным модулируемым потоком среды; связанный с указанным основным модулируемым потоком среды через, как минимум, одну рабочую зону воздействия потока среды, включающую, как минимум, один объект воздействия потока среды; связанный с указанным основным модулируемым потоком среды, который конструктивно отделен от указанного периодического процесса модулируемого потока среды; указанный периодический процесс является периодическим инжектированием указанного модулируемого потока среды внутри, как минимум, одной рабочей зоны; указанный периодический процесс является периодическим энергетическим воздействием на указанный модулируемый поток среды, который инжектирован вовнутрь, как минимум, одной рабочей зоны для реализации процесса энергетического преобразования и т.п.), а также - специальные варианты без каких-либо ограничений, например:
- обеспечение модулирования величины потоко-формирующего энергетического воздействия, как минимум, одного дополнительного средства потоко-формирующего энергетического воздействия, связанного с дополнительным модулируемым потоком среды, конструктивно отделенным от указанного общего модулируемого потока среды (например, в отмеченным выше различных высокоскоростных или космических аппаратов, как минимум, с двумя динамическими, так называемыми, "структурно-связанными" турбинными, турбореактивными или реактивными двигателями); или/и
- обеспечение модулирования величины потоко-формирющего энергетического воздействия, как минимум, одного дополнительного средства потоко-формирующего энергетического воздействия, связанного с дополнительным модулируемым потоком среды, который конструктивно непосредственно не связано с модулируемым потоком среды (например, в отмеченной выше динамической энергосберегающей сверхпроводящей "взрывной" системе, содержащей, как минимум, две подсистемы конструктивно непосредственно не связанных между собой, подобно динамическим "взрывным" подсистемам, которые реализуют "суперэффективные" динамические пространственные воздействия потока среды на объект, одновременно).
При этом указанный динамический процесс включает обеспечение преопределенного сравнительного фазового сдвига между предопределенными фазами указанного основного модулируемого потока и, как минимум, одного указанного дополнительного периодического процесса, который может быть изменен путем изменений фазы указанного модулирования в зависимости от изменения величины, как минимум, одной технологической характеристики в течение реализации обоих отмеченных выше процессов. Возможность оптимизационного управления указанным предопределенным сравнительным фазовым сдвигом (с использованием предложенных продольных плоских волн "каплевидной" формы модулируемого потоко-формирующего энергетического воздействия, и критерия энергетической оптимизации) позволяет, например, задавать и поддерживать, в среднем (в течение периода модулирования Тm), динамическое сверхпроводящее энергосберегающее состояние реализуемого динамического процесса (сопровождаемого драматическим уменьшением аэро- или гидродинамического сопротивления, реализуемого в модулируемых потоках), и обеспечивать динамическую синхронизацию работы "структурно-связанных" турбореактивных двигателей в отмеченных выше различных высокоскоростных аппаратах.
Отмеченные выше фундаментально новые возможности предопределяют более эффективные энергетические, эксплуатационные и экологические характеристики новых подобных динамических энергосберегающих сверхпроводящих систем, которые будут революционизировать широкий спектр приложений в многочисленных областях промышленности.
В то же время, предложенный динамический энергосберегающий сверхпроводящий метод может быть эффективно реализован не только в этих системах, которые используют в качестве средства потоко-формирующего энергетического воздействия, воздействующего на несущую среду, отмеченные выше типы средства перепада давления. Предложенный в изобретении метод может быть эффективно реализован в "энергетических" системах, которые используют в качестве средства воздействия на несущую среду - средство прямого энергетического воздействия (МГД-насосы, магнитные и электромагнитные ускоряющие системы и т.п.). В подобных средствах потоко-формирующего энергетического воздействия, подводимая к ним энергия (или несколько типов энергий), преобразуется непосредственно в прямое энергетическое воздействие на несущую среду для создания ее потока. В качестве подводимой энергии можно использовать, например: электрическую, электромагнитную, магнитную и другие виды энергии, или комбинацию нескольких видов энергий (например, комбинацию магнитной и электрически энергий, как в МГД-насосах).
В этих "энергетических" системах модулирование величины потоко-формирующего энергетического воздействия в средствах прямого энергетического воздействия (с использованием предложенного автоматического фазового управления, продольных плоских волн "каплевидной" формы модулируемого потоко-формирующего энергетического воздействия и критерия энергетической оптимизации) может осуществляться путем обеспечения контролируемых предопределенных динамических периодических изменений величины, как минимум, одного параметра, динамически связанного с процессом преобразования потребляемой энергии, а указанное модулирование потоко-формирующее энергетическое воздействие, реализуемое в средстве потоко-формирующего прямого энергетического воздействия, как заявлено, например, в Патенте США №6827528 (2004) - А.Релин.
Например, в МГД-насосе, в качестве переменного параметра преобразования, можно использовать: индукцию магнитного поля или электрическое напряжение, приложенное к участку потока несущей среды; дополнительное сопротивление, вводимое в электрическую цепь последовательно с отмеченным выше участком потока несущей среды и т.п. В этом случае, для реализации предложенного в изобретении динамического энергосберегающего сверхпроводящего метода, МГД-насос, должен быть дополнительно снабжен специальным "параметрическим энергосберегающим динамическим модулем", для заданных динамических периодических изменений величины выбранного, отмеченного выше, как минимум, одного параметра преобразования.
В таких "энергетических" системах оптимизация управления модулирования также связана с использованием нескольких контролируемых характеристик, которые отражают процесс транспортировки объекта потоком несущей среды. Эти системы могут включать: различные "лучевые" системы преобразования энергии; газовые поточные системы с использованием МГД-генератора и т.п. Эффективность использования таких "энергетических" систем в предложенном в изобретении методе может быть связана с увеличением преобразуемой (в другой вид) энергии, а также с улучшением параметров, характеризующих его качество. Последнее определяется возможностью минимизации влияния на процесс преобразования турбулентных факторов, а также - на динамическую природу движения частиц модулируемого потока среды.
В то же время, этот подход обеспечения модуляции с использованием различных типов специального "параметрического энергосберегающего динамического модуля", может быть эффективно использован в некоторых отмеченных выше системах, которые имеют средства перепада давления, в качестве средства потоко-формирующего энергетического воздействия. В этом случае, в качестве изменяемого параметра преобразования можно использовать, например: электрический, электромагнитный, магнитный, технический, физический, химический, физико-химический параметры, или комбинацию нескольких подобных или других параметров. Параметр (параметры) может быть выбран с учетом вида подводимой энергии и принципа воздействия средства перепада давления. Это может быть функционально-структурный параметр или параметр преобразования энергии, который связан динамически с процессом преобразования подводимой энергии в потоко-формирующее энергетическое воздействие, и существенно непосредственно воздействующее на процесс преобразования с его заданным изменением. Функция "параметрического энергосберегающего динамического модуля" может быть реализована в различных вариантах динамических управляемых устройств, которые обеспечивают возможность заданного динамического периодического изменения величины выбранного "модулируемого" параметра преобразования, например, с использованием динамической электромагнитной муфты сцепления, на основе специальных модуляторов "позиции" функциональных структурных элементов средства воздействия; или - специальных модуляторов его основных энергетических параметров и т.п. Поэтому отмеченный выше подход с использованием различных типов специальных устройств "параметрического энергосберегающего динамического модуля", как методологическое решение в осуществлении модуляции величины потоко-формирующего энергетического воздействия, может быть использован также в различных средствах воздействия для реализации новых предложенных динамических энергосберегающих "энергетических" систем сверхпроводящей транспортировки потока среды.
Отмеченный выше анализ всех примеров возможного эффективного использования предложенного энергосберегающего сверхпроводящего оптимизационного метода убедительно иллюстрирует общие и наиболее характерные отличительные особенности настоящего изобретения. В свою очередь, вышеупомянутые преимущества предложенного в изобретении метода открывают широкие возможности для создания принципиально нового класса энергосберегающих сверхпроводящих динамически управляемых систем транспортировки потока среды, которые обеспечивают эффективность энергетических и эксплуатационных характеристик разнообразных процессов транспортировки потока среды. Это отражает возможность перехода традиционных процессов транспортировки потока среды на качественно новый этап их развития. Этот этап развития будет характеризоваться широким использованием технологий динамической энергосберегающей сверхпроводящей транспортировки потока среды, связанных с новыми, описанными выше, динамическими потоко-формирующими энергетическими воздействиями на несущую среду, а также - связанные с динамическим, многопараметрическим оптимизационным управлением, которые используют текущий контроль динамических технологических характеристик подобных процессов динамической транспортировки различных объектов с помощью динамически созданного потока несущей среды.
Размеры и стоимость энергосберегающих динамических модулей (в отмеченных выше случаях) не будут превышать малую часть (двадцать-тридцать процентов) от размеров и общей стоимости соответствующих насосных систем, включающих насос, привода и блока управления. Энергосберегающие динамические модули (реализующие отмеченное выше негативное оптимизирующее модулирование с использованием предложенного автоматического фазового управления, продольных плоских волн "каплевидной" формы модулируемого потоко-формирующего энергетического воздействия и критерия энергетической оптимизации) могут быть спроектированы и изготовлены в различных типах конструктивных форм, зависящих от мощности насосов или насосных систем, трубопроводной транспортной структуры (длины, диаметра, давления, производительности и т.п.), потоков различных сред и используемых различных функциональных модификаций (для однопараметрической и многопараметрической оптимизации динамического процесса). Кроме этого, следует отметить, что вход длинного входного участка 6 шунтирующего канала модуля (см., например, Фигуру 2) может быть динамически защищен дополнительным фильтрующим элементом (описанным подробно, например, в отмеченном выше нашем Патенте США). Необходимое количество энергосберегающих динамических модулей, которое может быть произведено, может достигать миллионов штук для существующих и нового класса различных трубопроводных систем транспортировки потока среды. Поэтому весь потенциальный рынок для энергосберегающих динамических модулей и новых динамических систем может быть оценен на уровне многих миллиардов долларов.
В будущем, параллельно с разработкой и производством энергосберегающих динамических модулей будут создаваться принципиально новые динамические микропроцессорные средства (или системы) потоко-формирующего энергетического воздействия - энергосберегающие динамические помпы (как динамический управляемый "генератор" потоко-формирующих энергетических воздействий на поток несущей среды). Такие энергосберегающие динамические помпы будут включать новые конструктивные соединения между средством потоко-формирующего энергетического воздействия (например, насос) и всеми выше отмеченными основными функциональными компонентами энергосберегающего динамического модуля. Подобные энергосберегающие динамические помпы также могут создаваться в виде различных функциональных модификаций (например, для однопараметрического и многопараметрического управления), а также - для различных параметров трубопроводов и потока несущей среды. Необходимость в подобных энергосберегающих динамических помпах будет предопределяться объемом вводимых в эксплуатацию новых различных динамических энергосберегающих сверхпроводящих систем транспортировки потока среды, а также - возможным объемом замены старых насосов на новые энергосберегающие динамические помпы в эксплуатируемых трубопроводных системах транспортировки потока среды. Необходимое в будущем количество производства энергосберегающих динамических помп может также достигать миллионов штук, а их суммарная рыночная стоимость - миллиардов долларов.
В то же время, новые описанные выше энергосберегающий динамический модуль (связанный с насосом) и энергосберегающая динамическая помпа дополнительно могут обеспечивать функцию динамически управляемого трубопроводного "клапана". Такую функцию может обеспечивать, например, заданное изменение положения отмеченного вышерегулирующего элемента 23 в цилиндрическом клапанном блоке энергосберегающего динамического модуля 5, предопределяющее заданные изменения величины расхода потока среды путем заданного "шунтирующего" изменения величины давления насоса. Подобная функция динамически управляемого трубопроводного "клапана" позволяет изменять расход потока среды в трубопроводе без дополнительных изменений поперечного сечения рабочего трубопровода, что обеспечивает дополнительные снижения потребления энергии помпы.
Поэтому впервые созданные авторами (в РЭМКО Интернейшенел, Инк., Пеннсильвания, США), отмеченные выше новые энергетические оптимизационные принципы разработки энергосберегающего динамического модуля и энергосберегающих динамических помп, для реализации различных динамических энергосберегающих технологий сверхпроводящей транспортировки потока среды, будут формировать на рынке принципиально новый класс различных современных интеллектуальных динамических энергосберегающих продуктов, которые не имеют аналогов на мировом рынке. Одно из наиважнейших преимуществ применения подобных динамических энергосберегающих технологий состоит в том, что все эксплуатируемые трубопроводы и насосные системы не надо менять. Достаточно только приспособить энергосберегающий динамический модуль к эксплуатируемому насосу в действующей системе транспортировки потока среды.
Разработку отмеченных выше новых динамических энергосберегающих технологий сверхпроводящей транспортировки потока среды, которые реализуют вышеописанный энергетический феномен гидродинамической сверхпроводимости, можно сравнить (с точки зрения энергосбережения) с возможным применением феномена электрической сверхпроводимости. В течение 100 лет, с тех пор как это было открыто, были затрачены миллиарды долларов для проведения экспериментальных и теоретических исследований. Но до настоящего времени, это явление так и не нашло широкого практического применения, так как сверхпроводники еще не созданы. Более того, даже если такие сверхпроводники будут созданы (может быть в течение следующих пятидесяти лет), необходимо будет менять электрические провода на новые сверхпроводники во всех сетях и оборудовании (генераторы, двигатели и трансформаторы, и т.п.). В результате этого, возможно очень дорогой и продолжительной замены электрических проводов на новые сверхпроводники, экономия энергии может составлять не более пяти процентов от мирового энергетического рынка. В то же время, внедрение созданных, вышеотмеченных, новых динамических энергосберегающих технологий сверхпроводящей транспортировки потока среды может начаться в течение ближайших трех лет, и являются практически безальтернативными энергосберегающими технологиями для всего мирового энергетического рынка. Все это будет сопровождаться минимальными расходами для дальнейшего развития и последовательного внедрения новых уникальных прорывных динамических энергосберегающих технологий с максимальным сохранением уже существующей энергоемкой технологической инфраструктуры, которая охватывает до семидесяти процентов мировых индустрии.
Кроме того, новые динамические энергосберегающие технологии сверхпроводящей транспортировки потока среды гарантируют уменьшение потребления электроэнергии на миллиарды киловатт-часов в год. Учитывая, что доля энергетического потребления подобных технологий выше, чем пятьдесят процентов энергопотребления мирового рынка, экономия энергии и энергетических ресурсов может достигать приблизительно тридцати процентов от всего мирового энергетического рынка, а их общая рыночная стоимость - сотен миллиардов долларов. Указанные преимущества будут предопределять существенное уменьшение (в два-три раза) удельной цены динамической энергосберегающей транспортировки потока различных материалов и сред, а также - будут иметь существенное влияние на уменьшение цен энергетических ресурсов и промышленных товаров.
Реализация разработанных революционных динамических энергосберегающих технологий сверхпроводящей транспортировки потока среды позволит открыть широкие возможности для создания принципиально нового класса индустриальных динамически управляемых систем, которые обеспечат эффективность энергетических и эксплуатационных характеристик различных процессов транспортировки объекта потоком несущей среды. Это даст возможность для перехода традиционных индустриальных процессов транспортировки на качественно новый этап их развития. В действительности, эти технологии могут стать стандартом для различных индустрии в двадцать первом веке и определят новую эру технической эволюции в энергосберегающих технологиях транспортировки, базирующихся на сверхпроводимости потоков среды. В результате этого преобразования, могут быть достигнуты огромные сбережения энергетических ресурсов, новые технологические, эксплуатационные, качественные возможности и возможности ценообразования, для различных приложений на многомиллиардном мировом рынке. К тому же, это также определяет возможность получения экономического эффекта на многие миллиарды долларов, связанного с решением известных мировых энергетических, гуманитарных, экологических и социальных проблем.
Следует учитывать, что каждый из вышеописанных отличительных признаков настоящего изобретения, или совместно два из них (или более), могут также найти полезное применение в других методах или устройствах, которые могут отличаться от вышеописанных.
Невзирая на то, что изобретение проиллюстрировано и описано, как реализованное в новом методе динамической энергосберегающей сверхпроводящей транспортировки потока среды, оно не должно ограничиваться указанными деталями, поскольку различные модификации и структурные изменения могут быть произведены без какого-либо отклонения от сущности настоящего изобретения.
Без дальнейшего анализа, все вышеизложенное настолько полно раскрывает суть настоящего изобретения, что иные лица могут, с использованием современных знаний, легко адаптировать его для различных приложений, не упуская признаков, которые, с точки зрения истории технической области, составляют сущность общих или частных аспектов настоящего изобретения.
Указанная новизна изобретения, требующая защиты патентом, описана в прилагаемых клеймах изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ РЕЖИМОМ КОМПРЕССОРНОГО ЦЕХА С ОПТИМАЛЬНЫМ РАСПРЕДЕЛЕНИЕМ НАГРУЗКИ МЕЖДУ ГАЗОПЕРЕКАЧИВАЮЩИМИ АГРЕГАТАМИ | 2011 |
|
RU2454569C1 |
| Способ оптимального управления крупномасштабными трубопроводными системами энергетики с применением технологии искусственного интеллекта | 2023 |
|
RU2820047C1 |
| СПОСОБ ОПЕРАТИВНОЙ ДИАГНОСТИКИ СОСТОЯНИЙ МНОГОПАРАМЕТРИЧЕСКОГО ОБЪЕКТА ПО ДАННЫМ ИЗМЕРИТЕЛЬНОЙ ИНФОРМАЦИИ | 2009 |
|
RU2403619C1 |
| СПОСОБ ОПЕРАТИВНОГО ДИНАМИЧЕСКОГО АНАЛИЗА НЕЧЕТКОГО СОСТОЯНИЯ МНОГОПАРАМЕТРИЧЕСКОГО ОБЪЕКТА ИЛИ ПРОЦЕССА | 2013 |
|
RU2530297C1 |
| Способ и устройство технологически и экономически оптимального озонирования движущихся сыпучих кормов для животноводства и птицеводства | 2015 |
|
RU2608532C2 |
| СПОСОБ ОТОБРАЖЕНИЯ ДИАГНОСТИЧЕСКОЙ ИНФОРМАЦИИ | 2009 |
|
RU2403618C1 |
| СПОСОБ УПРАВЛЕНИЯ ФОРМИРОВАНИЕМ УРОЖАЯ В ТЕПЛИЦЕ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2552033C1 |
| Устройство для измерения скорости движения твердой фазы пульпы земснаряда | 1984 |
|
SU1245663A2 |
| СПОСОБ ОПТИМИЗАЦИИ ЭНЕРГОПОТРЕБЛЕНИЯ И ЭМИССИИ ПАРНИКОВЫХ ГАЗОВ ДЛЯ ТЕХНОЛОГИЧЕСКОГО ОБЪЕКТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2021 |
|
RU2783369C2 |
| СПОСОБ И СИСТЕМА ЦВЕТОВОГО ПРЕДСТАВЛЕНИЯ АНАЛИЗА ДИНАМИКИ СОСТОЯНИЯ МНОГОПАРАМЕТРИЧЕСКОГО ОБЪЕКТА ИЛИ ПРОЦЕССА | 2014 |
|
RU2580813C2 |
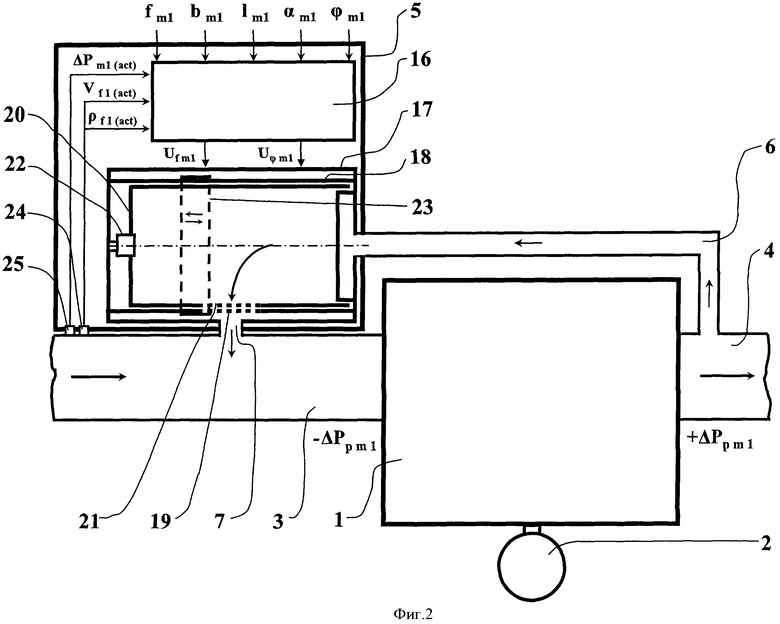
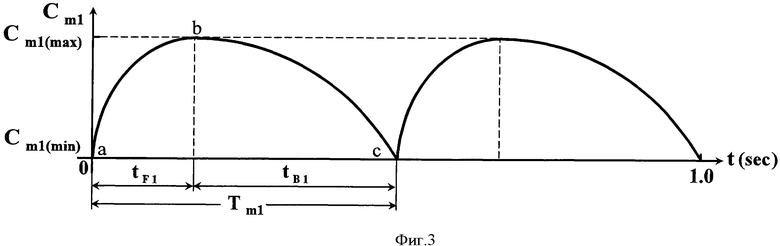
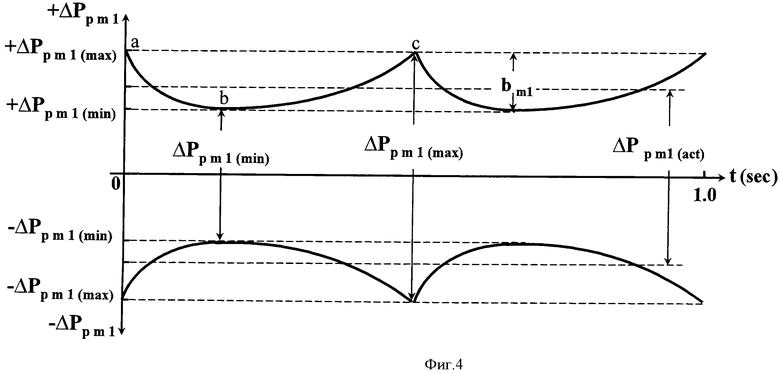
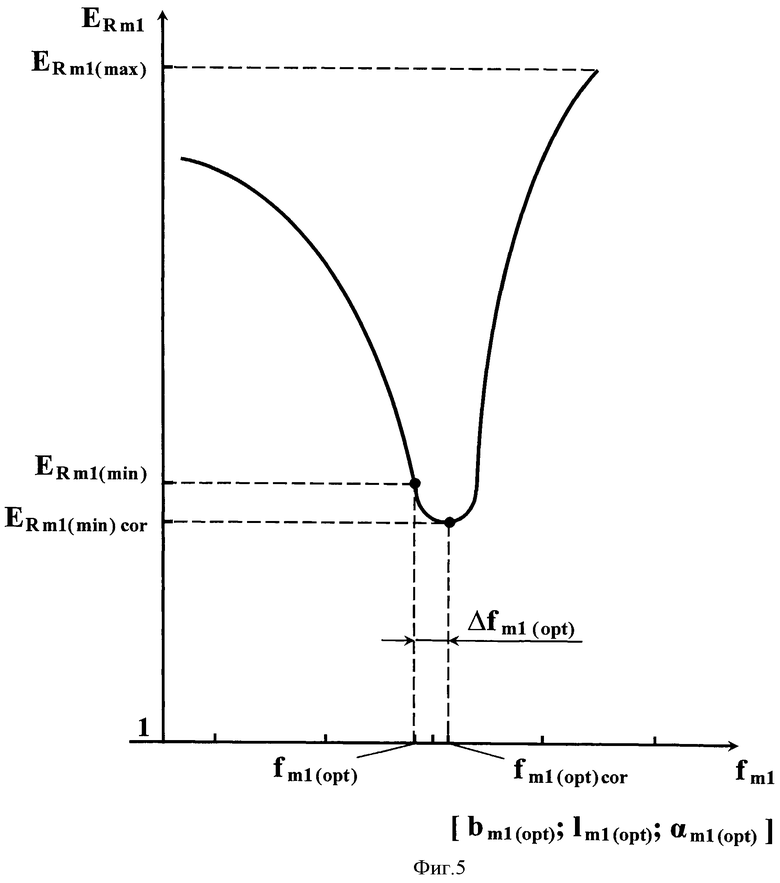


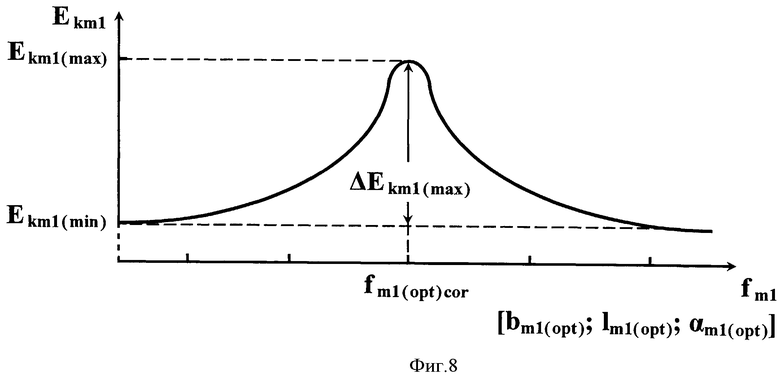
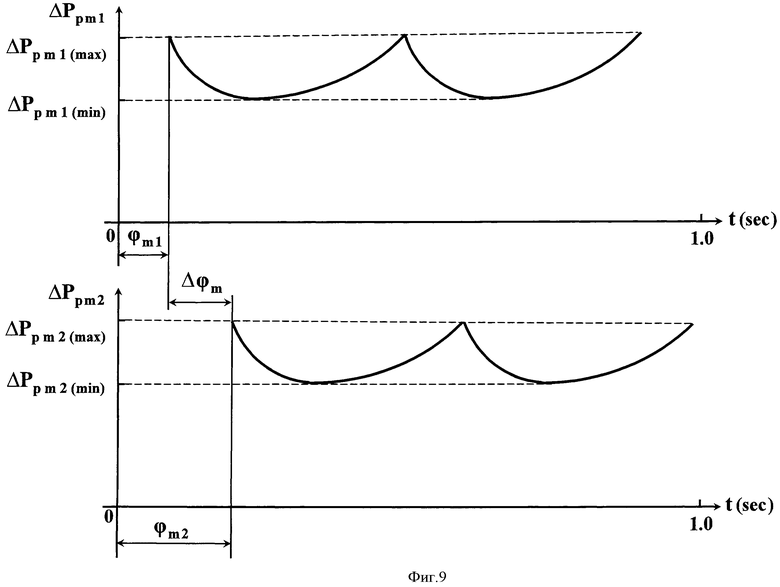

Способ динамической энергосберегающей транспортировки объекта потоком среды, в котором используется как минимум одно средство потоко-формирующего энергетического воздействия, включает: модулирование энергетического воздействия с частотой, измененной для обеспечения плоской формы продольных волн модулируемого энергетического воздействия в потоке, выбор частоты модулирования для обеспечения периода модулирования, обеспечение величины диапазона модулирования, а также обеспечение формы закона модулирования формирующего поток энергетического воздействия в каждом периоде модулирования. Способ также включает в себя изменение величины не менее одного из параметров модулирования: частоты, диапазона, и закона модулирования. Изобретение обеспечивает снижение энергозатрат при транспортировке объекта. 6 з.п. ф-лы, 10 ил.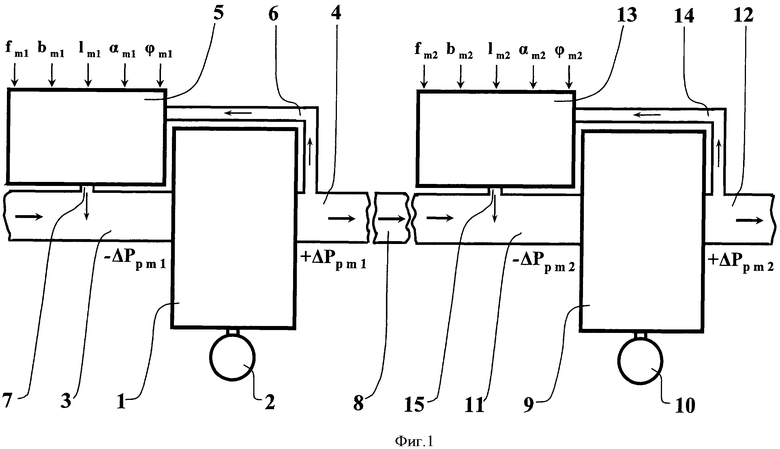
1. Способ динамической энергосберегающей транспортировки объекта потоком среды в системе динамической транспортировки потока среды, содержащей не менее одного средства, генерирующего формирующее поток энергетическое воздействие, и динамический модуль, выполненный так, чтобы обеспечивать модулирование формирующего поток энергетического воздействия на поток среды, имеющего в каждом периоде модулирования максимальное и минимальное значения, содержащий шаги:
модулирование формирующего поток энергетического воздействия с помощью динамического модуля для обеспечения формирования продольных волн формирующего поток энергетического воздействия на поток среды в течение модулирования, включающего:
выбор величины частоты модулирования для обеспечения периода модулирования и для обеспечения формирования продольных волн формирующего поток энергетического воздействия, как продольных плоских волн,
обеспечение величины диапазона модулирования формирующего поток энергетического воздействия между его максимальным и минимальным значениями в каждом периоде модулирования,
обеспечение формы закона модулирования формирующего поток энергетического воздействия в каждом периоде модулирования;
контролирование действующего значения формирующего поток энергетического воздействия на поток среды в течение модулирования, путем
контролирования действующего значения не менее одного энергетического параметра, связанного с величиной энергопотребления средства, генерирующего формирующее поток энергетическое воздействие, и оценки контролируемого действующего значения формирующего поток энергетического воздействия с использованием контролируемого действующего значения энергетического параметра;
контролирование действующего значения кинетической энергии модулируемого потока среды, путем
контролирования действующего значения скорости модулируемого потока среды,
контролирования действующего значения плотности модулируемого потока среды, и
оценки контролируемого действующего значения кинетической энергии с использованием контролируемого действующего значения скорости и контролируемого действующего значения плотности модулируемого потока среды;
оценивание значения энергетического отношения контролируемого действующего значения формирующего поток энергетического воздействия на модулируемый поток среды к контролируемому действующему значению кинетической энергии модулируемого потока среды; и
изменение величины не менее одного из параметров модулирования: частоты, диапазона и закона модулирования для обеспечения минимального значения энергетического отношения с целью динамической структурно-энергетической оптимизации модулируемого потока среды.
2. Способ динамической энергосберегающей транспортировки объекта потоком среды по п.1, где обеспечение формы закона модулирования формирующего поток энергетического воздействия на поток среды в каждом периоде модулирования включает реализацию фронтальной части формы закона модулирования в течение времени фронта и реализацию обратной части формы закона модулирования в течение обратного времени, соответственно, путем
обеспечения времени фронта для создания фронтальной части формы закона модулирования за счет выбора величины временного отношения времени фронта к периоду модулирования из диапазона: больше чем 0 и меньше чем 0,5,
уменьшения формирующего поток энергетического воздействия от максимального значения до минимального значения на величину диапазона модулирования в течение времени фронта, для создания фронтальной части формы закона модулирования, за счет изменения фронтальной части формы закона модулирования по форме кривой четверти эллипса так, что горизонтальная ось эллипса совпадает с горизонтальной осью формы закона модулирования формирующего поток энергетического воздействия на поток среды, и
востановления формирующего поток энергетического воздействия от минимального значения до максимального значения в течение обратного времени, для создания обратной части формы закона модулирования формирующего поток энергетического воздействия, за счет изменения обратной части формы закона модулирования по форме кривой степенной функции так, что начальное значение кривой степенной функции совпадает с конечным значением кривой четверти эллипса.
3. Способ динамической энергосберегающей транспортировки объекта потоком среды по п.2, где величину временного отношения используют как дополнительный параметр модулирования и изменяют величину временного отношения так, что обеспечивается минимальное значение энергетического отношения для динамической структурно-энергетической оптимизации модулируемого потока среды.
4. Способ динамической энергосберегающей транспортировки объекта потоком среды по п.1 дополнительно включает взаимодействие модулируемого потока среды не менее чем с одним объектом.
5. Способ динамической энергосберегающей транспортировки объекта потоком среды по п.1 дополнительно включает взаимодействие модулируемого потока среды непосредственно не менее чем с одним независимым периодическим процессом, имеющим частоту, диапазон, закон и фазу изменения энергетического воздействия на модулируемый поток среды.
6. Способ динамической энергосберегающей транспортировки объекта потоком среды по п.1 дополнительно включает взаимодействие модулируемого потока среды не менее чем через один объект и не менее чем с одним независимым периодическим процессом, имеющим частоту, диапазон, закон и фазу изменения энергетического воздействия на модулируемый поток среды.
7. Способ динамической энергосберегающей транспортировки объекта потоком среды по п.5 или 6, где модулирование включает обеспечение величины фазы модулирования, как дополнительного параметра модулирования, для динамической структурно-энергетической оптимизации модулируемого потока среды.
| WO 2005065099 A2, 21.07.2005 | |||
| US 5593252 A, 14.01.1997 | |||
| US 2008089747 A1, 17.04.2008 | |||
| US6447215 B1 10.09.2002 | |||
| Установка для пневматической перегрузки сыпучего материала | 1990 |
|
SU1835381A1 |

