Изобретение относится к области трубопроводных систем энергетики и направлено на усовершенствование подходов к поиску оптимальных управляющих воздействий в крупномасштабных трубопроводных системах (КТС) энергетики. В частности, изобретение может быть применено к крупномасштабным газотранспортным системам.
Известен метод [US007587326B1], который представляет собой балансовую модель всей газотранспортной системы. Метод позволяет решать задачу определения количества газа и распределения газа одновременно и систематизировано по всей газотранспортной сети. Изобретение относится к газотранспортным системам и позволяет сохранять баланс газа, поступающего в газотранспортную сеть и исходящего из нее. Предполагается, что в газотранспортной системе появляются логические точки (пулы), где возможно добавлять или отбирать газ из системы. Пулы не являются физическими точками, поэтому там не может оставаться газ к концу моделируемого периода.
Известен метод оптимизации [US006829566B2], позволяющий производить оптимизацию по заданным критериям. Демонстрируется способ на примере водопроводной сети. Способ позволяет определять требования к пиковому расходу каждой трубы и учитывает эксплуатационные критерии сети.
Известен способ автоматической оптимизации работы системы транспортировки природного газа [RU2007116343A], с помощью которого можно определять значения непрерывно изменяющихся переменных (давление и расход газа в любой точке системы) и дискретных величин (состояние запуска компрессоров, состояние открытия компрессорных станций, состояние открытия регулирующих вентилей, состояние обводных элементов компрессорных станций, состояние обводных элементов регулирующих вентилей, ориентация компрессорных станций и ориентация регулирующих вентилей). Способ характеризуется тем, что в качестве исходного состояния оптимизации выбирают интервалы значений непрерывно изменяющихся переменных и наборы значений дискретных переменных.
Известен способ автоматической оптимизации газотранспортной сети [EP1852820A1], включающие определение значений для непрерывных переменных, таких как давление и расход во всех точках газотранспортной сети, и определение значений для дискретных переменных, например, состояние открытия регулирующих кранов и т.д. Способ отличается тем, что диапазоны значений для непрерывных переменных и наборы значений для дискретных переменных выбираются в качестве начального состояния оптимизации.
Известна полезная модель единой системы управления трубопроводной системы [RU140620U1], использующаяся для комплексного непрерывного управления и контроля трубопроводных систем энергетики.
Недостатком известных способов является невозможность учитывать гидравлическую составляющую при моделировании режима работы КТС. Как следствие, указанный недостаток приводит к невозможности создания достаточно точных способов управления и, следовательно, существенной погрешности при управлении технологическими процессами. В частности, на сегодняшний день отсутствует эффективный способ управления КТС, позволяющий учитывать физические процессы транспорта продукта.
Техническим результатом, на достижение которого направлено предполагаемое техническое решение, является повышение эффективности управления КТС энергетики, в том числе обеспечение оптимального распределения потоков продукта по трубопроводной системе согласно выбранному критерию оптимизации.
Сущность предполагаемого способа заключается в следующем.
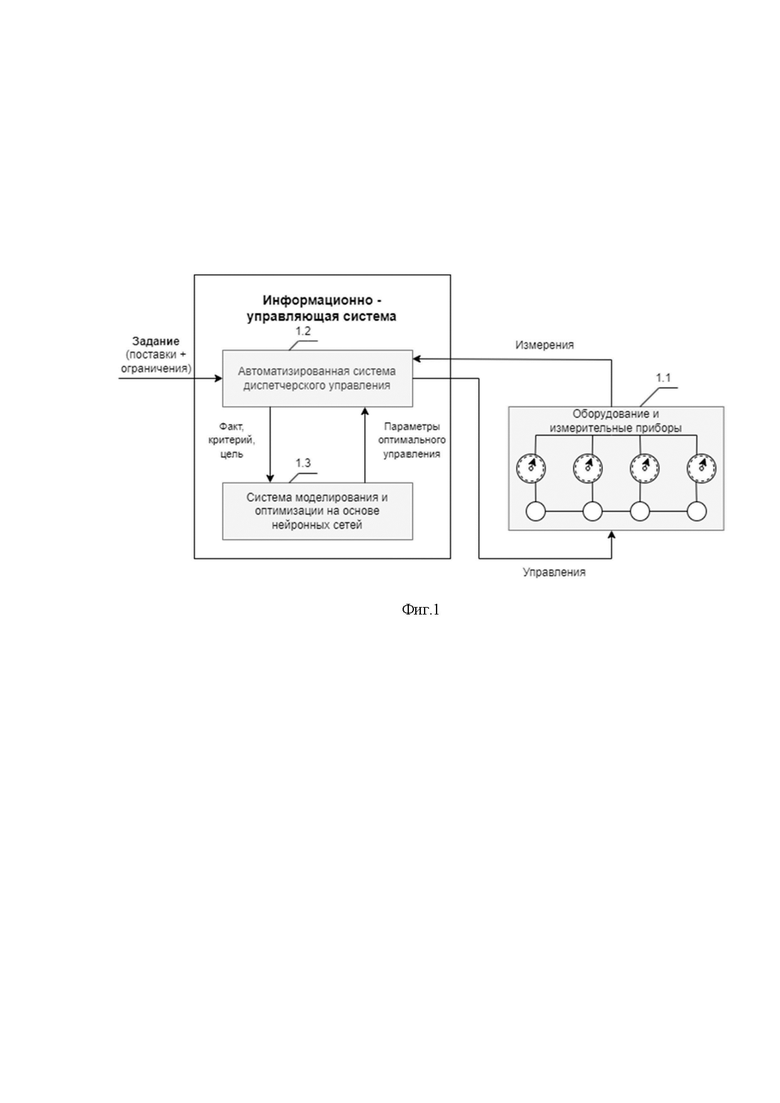
Указанный технический результат достигается тем, что Способ оптимального управления КТС энергетики с применением технологии искусственного интеллекта включает создание и оснащение информационно-управляющей системы (ИУС) оборудованием, обеспечивающим дистанционный контроль за заданными параметрами транспорта продукта (объемы транспортировки, распределение давления по системе, управляющие воздействия на КС), моделируя в режиме реального времени процесс транспорта продукта и выполняя многовариантные расчеты режимов работы трубопроводной системы, управляя расчетами в режиме реального времени (real-time), осуществляя выбор режима работы системы на основе задания и критерия управления, а также формирование и передачу управляющих команд в автоматизированную систему диспетчерского управления для визуального контроля персонала и лица принимающего решение (фиг. 1).
В настоящее время практически все КТС оснащены автоматизированными системами управления диспетчерского управления (АСДУ), которые работают под управлением диспетчерского персонала и обеспечивают контроль параметров процессов транспортировки продукта и дистанционное управление режимами работы трубопроводной системы и оборудования. Если оснащение АСДУ не обеспечивает контроль и управление в требуемом объеме для адекватного моделирования и оптимизации процессов транспортировки продукта, то систему дооснащают.
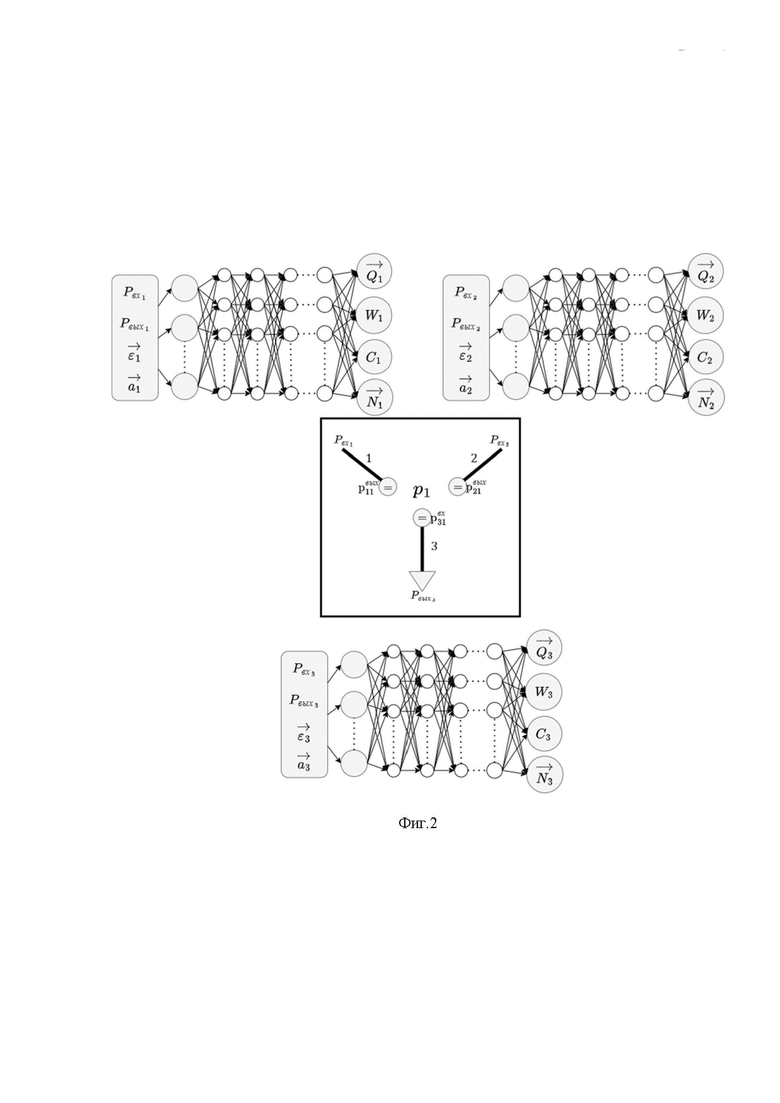
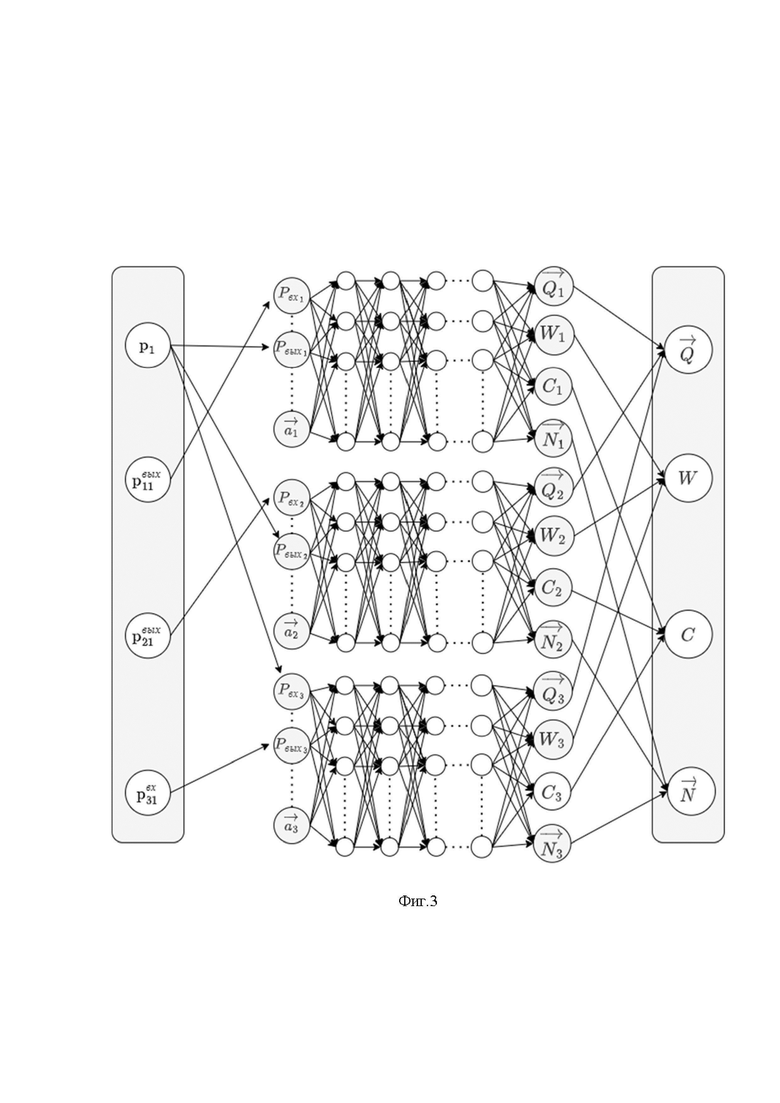
На фиг. 1 представлена схема информационно-управляющей системы (ИУС), на фиг. 2 изображена схема объединения нейронных сетей подсистем, на фиг. 3 отражена принципиальная схема объединения нейронных сетей подсистем в общую нейронную сеть согласно топологии ГТС ЕСГ.
На указанных фигурах приведены следующие обозначения:
1.1 - измерительное оборудование;
1.2 - автоматизированная система диспетчерского моделирования (АСДУ);
1.3 - система моделирования и оптимизации с применением нейронных сетей;
1, 2, 3 - номера подсистем.
Способ предполагает создание ИУС, включающей в себя систему моделирования и оптимизации, которая основана на использовании нейросетевой модели.
Параметры процессов транспортировки продукта контролируют с помощью измерительного оборудования (1.1). Результаты измерений попадают в АСДУ (1.2), откуда передаются в систему моделирования и оптимизации с применением нейронных сетей (1.3), которая представляет из себя программный комплекс.В системе моделирования и оптимизации происходит моделирование работы системы, с учетом поступающих данных о параметрах процессов транспорта, которые дают информацию о текущем состоянии системы, рассчитываются в режиме реального времени возможные сценарии работы трубопроводной системы с учетом всех ограничений работы оборудования и подсистем. По заданному алгоритму в автоматическом режиме происходит управление расчетами и на основе заданных целевых функций выбирается наиболее эффективный сценарий с учетом плана по транспортировке продукта и других ограничивающих факторов. Найденные оптимальные варианты управляющих воздействий поступают диспетчеру, который их контролирует, корректирует в случае необходимости и далее посредством АСДУ управления передаются на технологическое оборудование.
В основе моделирования трубопроводных систем энергетики лежит теория гидравлических цепей [А.П.Меренков, В.Я.Хасилев. Теория гидравлических цепей. Москва «Наука», 1985.]. В каждой гидравлической системе выделяются основные составляющие: источники давления или расхода (например, компрессорные станции (КС), аккумулирующие емкости и т.д.), гидравлическая сеть (взаимосвязанные трубопроводы, воздуховоды и т.д.) и потребители. Ранее к гидравлическим системам применялись классические методы гидравлического расчета, однако, рассматриваемое изобретение предполагает использование «гибридных» моделей - совокупность гидравлических и нейросетевых моделей для каждой подсистемы трубопроводной системы.
Способ предполагает, что трубопроводная система является совокупностью смежных подсистем, в качестве которых могут выступать либо активные и пассивные элементы (трубы, пункты редуцирования давления (РД), КС или насосные станции), либо фрагменты трубопроводной системы из нескольких таких элементов. Каждая подсистема оборудована измерительными устройствами диспетчерского управления. Данные, поступающие с датчиков, установленных на объектах системы, передаются в базу данных в систему диспетчерского управления, где подвергаются обработке и далее используются для проведения многовариантных расчетов.
Нейросетевая модель создается отдельно для каждой подсистемы (если подсистемы - элементы, то для каждого типа объектов (КС, ЛУ и т.д.). На первом этапе производится сбор информации, поступающей с оборудования и измерительных приборов. Параметры режимов работы, поступают с датчиков в режиме реального времени. Размерность задачи может быть понижена с помощью агрегации некоторых элементов (объединение потребителей между двумя соседними КС, модель КС в целом, а не отдельных цехов и т.д.).
Оптимизационная модель оценивает все критерии управления, формирует задачу по установленному диспетчером критерию, решает задачу и предлагает оптимальный сценарий управления КТС в текущем состоянии, используемый диспетчером для изменения параметров работы системы. Решается задача эффективного потокораспределения продукта по системе в целом, отличающаяся тем, что ИУС с системой моделирования формируют на основе нейросетевой модели трубопроводной системы, являющейся объединением нейросетевых моделей ее подсистем, представляющих собой дифференцируемые функции, снабжают автоматизированную систему управления технологическим процессом и ИУС диспетчерского управления, создают базу данных для системы моделирования с заданными значениями параметров в виде предельных значений контролируемых режимно-технологических параметров, данные измерений поступают в автоматизированную систему управления технологическим процессом, в которой достоверную информацию о данных измерения из ИУС диспетчерского управления передают в систему моделирования, который в режиме реального времени осуществляет оптимизационные расчеты с использованием полученной достоверной информации о данных измерения посредством математической модели, которая определяет режим работы с учетом заданного критерия управления трубопроводной системой, позволяет с высокой степенью детализации и точности определять изменение режима работы КТС большой размерности, в том числе распределения потоков, давлений и температур транспортируемого продукта, параметров производственных мощностей, вследствие изменения управлений или внешних условий, позволяет для КТС большой размерности определять оптимальные управляющие воздействия, обеспечивающие минимизацию (максимизацию) заданного критерия при обеспечении необходимых поставок потребителям и выполнении технологических ограничений, в том числе по давлениям, объемам и температурам транспортируемого флюида, а также параметрам производственных мощностей. Представленное техническое решение является элементом системы диспетчерского управления.
Постановка задачи поиска оптимального управления КТС с помощью системы моделирования ИУС.
Постановка задачи показана на примере минимизации энергетических затрат на транспортировку газа.
Расчетная схема подсистемы формируется экспертом с учетом результатов анализа характерных режимов работы в рассматриваемом сезоне. В модель для каждой подсистемы введены функции затрат топливно-энергетических ресурсов на собственные технологические нужды (СТН), запаса газа аккумулированного в трубах подсистемы и вектор-функция потребляемой мощности на КС подсистемы, которые имеют вид



а также каждая подсистема характеризуется вектором распределения потоков в стыковых узлах i-ой подсистемы

где  - функция затрат ТЭР на СТН i-ой подсистемы ГТС;
- функция затрат ТЭР на СТН i-ой подсистемы ГТС; вектор распределения давлений в узлах i-ой подсистемы, которые являются входными для подсистемы;
вектор распределения давлений в узлах i-ой подсистемы, которые являются входными для подсистемы;  значение давления в
значение давления в  узлах (являющимися входами i-ой подсистемы);
узлах (являющимися входами i-ой подсистемы);  вектор распределения давлений в узлах i-ой подсистемы, которые являются выходными для подсистемы;
вектор распределения давлений в узлах i-ой подсистемы, которые являются выходными для подсистемы;  значение давления в узлах (являющимися выходами i-ой подсистемы);
значение давления в узлах (являющимися выходами i-ой подсистемы);  стыковые узлы i-ой подсистемы,
стыковые узлы i-ой подсистемы,  количество стыковых узлов i-ой подсистемы;
количество стыковых узлов i-ой подсистемы;  - вектор степеней сжатия КС i-ой подсистемы;
- вектор степеней сжатия КС i-ой подсистемы;  - вектор характеристик i-ой подсистемы;
- вектор характеристик i-ой подсистемы;  - запас газа, аккумулированный в трубах i-ой подсистемы;
- запас газа, аккумулированный в трубах i-ой подсистемы;  - вектор-функция потребляемой мощности на КС i-ой подсистемы ГТС;
- вектор-функция потребляемой мощности на КС i-ой подсистемы ГТС;  вектор распределения потоков в стыковых узлах i-ой подсистемы,
вектор распределения потоков в стыковых узлах i-ой подсистемы,  значение расхода в узлах i-ой подсистемы.
значение расхода в узлах i-ой подсистемы.
Выборка режимов работы для обучения каждой подсистемы формируется путем расчета функций  для различных комбинаций
для различных комбинаций  , что дает возможность после обучения нейронной сети определить вектор-функции вида
, что дает возможность после обучения нейронной сети определить вектор-функции вида

которые представлены глубокими нейронными сетями, связывающими между собой входные параметры модели подсистем ГТС и соответствующие им величины объема транспортируемого газа и потребления ТЭР.
Управлениями для системы в целом являются параметры работы активных элементов системы - степени сжатия на КС. В результате решения оптимизационной задачи для каждого стыкового узла подсистем в соответствии с оптимальными управляющими воздействиями определяется давление газа, а для каждой подсистемы - потоки и другие моделируемые характеристики подсистемы.
Технологический расчет для системы выполняется с соблюдением ограничений в виде равенств - нелинейных уравнений баланса газа в стыковых узлах:

 (3)
(3)
где  - множество всех стыковых узлов;
- множество всех стыковых узлов; - множество подсистем, для которых узел k является стыковым;
- множество подсистем, для которых узел k является стыковым;  - расход газа по i-ой -ой подсистеме через стыковой узел k; (
- расход газа по i-ой -ой подсистеме через стыковой узел k; ( - разница между локальным поступлением газа в k-ый стыковой узел и его распределением (невязка),
- разница между локальным поступлением газа в k-ый стыковой узел и его распределением (невязка), ;
;  давление в k-ом стыковом узле, если k-ый узел является выходным узлом i-ой подсистемы;
давление в k-ом стыковом узле, если k-ый узел является выходным узлом i-ой подсистемы;  давление в k-ом стыковом узле, если k -ый узел является входным узлом j-ой подсистемы.
давление в k-ом стыковом узле, если k -ый узел является входным узлом j-ой подсистемы.
В рассматриваемой задаче для всей системы искомые переменные - величины давления газа  в стыковых узлах и значения степеней сжатия КС, на которые наложены ограничения-неравенства вида:
в стыковых узлах и значения степеней сжатия КС, на которые наложены ограничения-неравенства вида:



где  - множество КC рассматриваемой ГТС.
- множество КC рассматриваемой ГТС.
Кроме того, аналогичным (4) способом должны быть заданы условия на узлах, которые не являются стыковыми узлами подсистем в количестве, достаточном для получения однозначного решения.
Условие (3) обеспечивается построением объединенной нейросетевой модели системы. Она формируется так:
- входной слой состоит из нейронов, на которые подаются значения  ;
;
- входной слой соединен с входными слоями нейросетей для подсистем в соответствии с (3) для давлений в стыковых узлах, и тождественно для остальных параметров;
- выходной слой агрегирует данные выходных слоев моделей подсистем.
Пример построения объединенной нейросетевой модели для простой системы из 3 подсистем с одним стыковым узлом представлен на фиг. 2 и фиг. 3. Для каждой нейросетевой модели имеется набор входных и выходных параметров . При объединении (фиг. 2) выполняются равенства:
 ,
,
 ,
,
 ,.
,.
условие баланса расхода (2) в этом случае примет вид

На фиг. 3 представлена принципиальная схема объединения нейронных сетей, на которой представлено как значение давление в стыковом узле ( передается на вход нейронной сети.
передается на вход нейронной сети.
Целевая функция для модели системы имеет вид:
где  весовой коэффициент.
весовой коэффициент.
Совокупность (1), (2), (4), (5), (6), (7) представляет собой оптимизационную задачу, сформированную с применением гладких дифференцируемых функций. Такая постановка задачи позволяет использовать оптимизационные пакеты на основе градиентных методов, позволяющие использовать автоматическую дифференцируемость таких функций. Качество получаемых оптимальных управленческих решений зависит от применяемого оптимизационного пакета.
Изобретение может быть применено к различным трубопроводным системам энергетики при использовании соответствующей терминологии.
Предполагаемое изобретение может быть использовано при разработке ИУС с использованием системы моделирования и оптимизации на основе нейронных сетей, которые позволят интеллектуализировать управление потоками газа в КТС с автоматизацией процесса принятия решения о выборе параметров работы системы в режиме реального времени, обеспечив поставки продукта потребителям и оптимальное решение с приемлемой точностью.
Предполагаемое изобретение способствует повышению энергоэффективности трубопроводной системы.
Способ может быть использован при планировании режимов трубопроводных систем с использованием нелинейных критериев (критерий минимума энергетических или стоимостных затрат топливно-энергетических ресурсов на нужды транспорта и т.д.)
Способ отличается быстрым и эффективным решением задачи оптимизации за счет использования дифференцируемости нейронных сетей.
Изобретение позволяет сбалансировать систему и подобрать оптимальный режим работы, согласно выбранному критерию оптимизации.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОУРОВНЕВАЯ АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ ПРОИЗВОДСТВЕННО-ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ С УПРАВЛЕНИЕМ ЗАТРАТАМИ НА ОСНОВЕ МОНИТОРИНГА, АНАЛИЗА И ПРОГНОЗА СОСТОЯНИЯ ТЕХНОЛОГИЧЕСКОЙ ИНФРАСТРУКТУРЫ НЕФТЕГАЗОДОБЫВАЮЩЕГО ПРЕДПРИЯТИЯ | 2010 |
|
RU2435188C1 |
| НЕЙРОСЕТЕВОЙ РЕГУЛЯТОР ДЛЯ УПРАВЛЕНИЯ ПРОЦЕССОМ ОБЖИГА ИЗВЕСТНЯКА В ПЕЧАХ ШАХТНОГО ТИПА | 2009 |
|
RU2445668C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОЦЕССОМ ПРОКАЛИВАНИЯ СЫРЬЕВОГО МАТЕРИАЛА ВО ВРАЩАЮЩЕЙСЯ ПЕЧИ | 2006 |
|
RU2308651C1 |
| НЕЙРОСЕТЕВОЙ РЕГУЛЯТОР ДЛЯ УПРАВЛЕНИЯ КУРСОМ СУДНА | 2007 |
|
RU2359308C2 |
| Способ автоматического распределения отключения нагрузки | 2020 |
|
RU2730692C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ВОЕННОЙ АВТОМОБИЛЬНОЙ ТЕХНИКИ В СОСТАВЕ КОЛОННЫ С УЧЁТОМ СОСТОЯНИЯ ОПОРНОЙ ПОВЕРХНОСТИ | 2020 |
|
RU2746046C2 |
| Индивидуальный диспетчерский тренажер для тренинга оперативно-диспетчерского персонала магистральных нефтепроводов | 2015 |
|
RU2639932C2 |
| СПОСОБ УПРАВЛЕНИЯ РЕЖИМАМИ НА ОСНОВЕ НЕЙРОСЕТЕВОГО ДИАГНОСТИРОВАНИЯ НЕИСПРАВНОСТЕЙ И ТЕХНИЧЕСКОГО СОСТОЯНИЯ ЭЛЕКТРОПРИВОДНОГО ГАЗОПЕРЕКАЧИВАЮЩЕГО АГРЕГАТА | 2017 |
|
RU2648413C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СУДНОМ ПО КУРСУ И ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2012 |
|
RU2519315C2 |
| СПОСОБЫ И СИСТЕМЫ ДЛЯ МОДЕЛИРОВАНИЯ НЕЙРОННЫХ СЕТЕЙ КОМПОНЕНТОВ ТУРБИНЫ | 2008 |
|
RU2482307C2 |
Изобретение относится к области систем энергетики и может использоваться для формирования управляющих воздействий на оборудование крупномасштабной трубопроводной системы (КТС) энергетики в целом в режиме реального времени с учетом обеспечения заявленных поставок продукта и минимизации энергетических затрат. Способ оптимального управления КТС энергетики с применением технологии искусственного интеллекта включает создание информационно-управляющей системы (ИУС) и оснащение ее измерительными приборами для дистанционного контроля параметров режимов работы основного технологического оборудования трубопроводного транспорта. ИУС получает данные с измерительных приборов, параметры процессов через АСДУ передаются в систему моделирования и оптимизации на основе нейронных сетей, предназначенную для выполнения многовариантных расчетов и оптимизации режимов работы в соответствии с заданием диспетчера, где выбирается наиболее эффективный сценарий, который реализуется под контролем диспетчера путем формирования в АСДУ и последующей передачи соответствующих управляющих команд на оборудование. Критерием оптимизации могут являться затраты топливно-энергетических ресурсов на нужды транспорта в натуральном или стоимостном выражении, товаротранспортная работа, использование запаса газа, аккумулированного в трубопроводах системы (для газотранспортных систем). Технический результат заключается в интеллектуализации управления КТС энергетики путем использования системы моделирования для определения оптимальных управлений в режиме реального времени, что позволит существенно повысить качество принимаемых решений по управлению системой, в том числе регулировать распределение потоков продукта так, чтобы минимизировать энергетические затраты на транспортировку, и, как следствие, эксплуатационные расходы. 3 ил.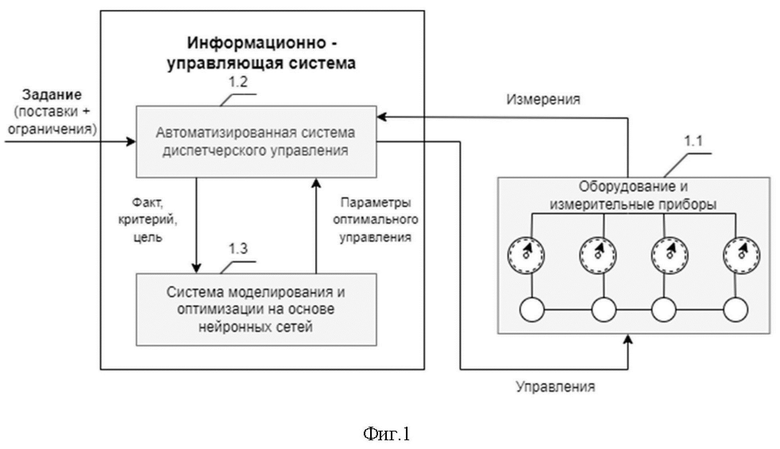
Способ оптимального управления крупномасштабными трубопроводными системами (КТС) энергетики с применением технологии искусственного интеллекта, включающий создание и оснащение информационно-управляющей системы (ИУС) оборудованием, обеспечивающим дистанционный контроль за заданными параметрами процессов транспортировки, и дистанционное управление режимами работы трубопроводной системы, моделируя в режиме реального времени процесс транспорта продукта, сбор замеренных данных с оборудования ИУС, выполнение многовариантных расчетов режимов работы КТС энергетики, управление расчетами в режиме реального времени, осуществляя выбор режима работы, формирование и передачу управляющих команд на ИУС диспетчерского управления для изменения режима работы, систему моделирования с программно-аппаратным комплексом, входящую в состав ИУС, осуществление измерения заданных параметров посредством измерительных устройств, расположенных с возможностью их измерения и передачи, осуществление передачи данных измерений в режиме реального времени с возможностью их визуального контроля диспетчерским персоналом и с возможностью многовариантных прогнозных расчетов в системе моделирования, осуществление в системе моделирования в режиме реального времени многовариантных расчетов с возможностью выбора режима работы трубопроводной системы энергетики с учетом технологических ограничений работы объектов системы, отличающийся тем, что ИУС с системой моделирования формируют на основе нейросетевой модели трубопроводной системы, являющейся объединением нейросетевых моделей её подсистем, представляющих собой дифференцируемые функции, снабжают автоматизированной системой управления технологическим процессом и ИУС диспетчерского управления, создают базу данных для системы моделирования с заданными значениями параметров в виде предельных значений контролируемых режимно-технологических параметров, данные измерений поступают в автоматизированную систему управления технологическим процессом, в которой достоверную информацию о данных измерения из автоматизированной системы диспетчерского управления передают в систему моделирования, который в режиме реального времени осуществляет оптимизационные расчеты с использованием полученной достоверной информации о данных измерения посредством математической модели, которая определяет режим работы с учетом заданного критерия управления трубопроводной системой, позволяет с высокой степенью детализации и точности определять изменение режима работы КТС большой размерности, в том числе распределения потоков, давлений и температур транспортируемого продукта, параметров производственных мощностей, вследствие изменения управлений или внешних условий, позволяет для КТС большой размерности определять оптимальные управляющие воздействия, обеспечивающие минимизацию (максимизацию) заданного критерия при обеспечении необходимых поставок потребителям и выполнении технологических ограничений, в том числе по давлениям, объёмам и температурам транспортируемого продукта, а также параметрам производственных мощностей.
| СПОСОБ УПРАВЛЕНИЯ ДОБЫЧЕЙ ГАЗА МНОГОПЛАСТОВОГО МЕСТОРОЖДЕНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2798646C1 |
| RU 2007116343 A, 10.11.2008 | |||
| Приспособление для закрепления шарикоподшипника | 1932 |
|
SU31192A1 |

