Изобретение относится к устройствам для автоматического согласования ограниченного крутящего момента и оборотов источника энергии, например, двигателя внутреннего сгорания с моментом сопротивления нагрузки, изменяющимся в широких пределах, а именно - к инерционным трансформаторам вращающего момента и может найти широкое применение в автомобилестроении и приводе различных машин и механизмов.
Известен инерционный трансформатор, содержащий систему пространственно расположенных рычагов, имеющих общие шарниры и связывающих ведущий, промежуточный и ведомый валы, при этом один из рычагов выполнен со смещением центра масс за пределы шарниров, и механизмов свободного хода между промежуточным и ведомым валом устройства (Механические импульсные передачи. В.Ф.Мальцев. Издание третье. Москва. «Машиностроение». 1978 г. Стр.65. Рис.23.).
Недостатком этого технического решения являются большие габариты устройства и малый передаваемый момент вследствие большого количества пространственно расположенных рычагов и шарниров, имеющих ограниченную жесткость.
От указанного недостатка (большое количество рычагов) свободен инерционный трансформатор, содержащий систему из соосно расположенных ведущего, промежуточного и ведомого валов и по меньшей мере одной пары рычагов, имеющих общий шарнир, связывающих кривошипы ведущего и промежуточного валов, при этом один из рычагов выполняет роль грузового звена, и механизмов свободного хода между промежуточным и ведомым валом устройства (Механические импульсные передачи. В.Ф.Мальцев. Издание третье. Москва. «Машиностроение». 1978 г. Стр.77. Рис.31.). Данное техническое решение известно также, как передача Балжи (А.И.Леонов. Инерционные автоматические трансформаторы вращающего момента. Москва. Машиностроение. 1978 г. Стр.13. Рис.4.), и выбрано как прототип предлагаемого технического решения.
Общим недостатком этих импульсных трансформаторов является знакопеременность получаемого вращающего момента на промежуточном валу устройства, вследствие чего для передачи вращающего момента в одну сторону требуются механизмы свободного хода, являющиеся неотъемлемой частью конструкции трансформатора по этой схеме (А.И.Леонов. Инерционные автоматические трансформаторы вращающего момента. Москва. Машиностроение. 1978 г. Стр.24. О возможности создания инерционного трансформатора без механизмов свободного хода.). Механизмы свободного хода являются наиболее нагруженной и наименее надежной деталью инерционного трансформатора, что ограничивает применение инерционных трансформаторов в целом.
Задачей изобретения является упрощение конструкции, увеличение ресурса и области допустимых нагрузок и оборотов инерционного трансформатора.
Это достигается тем, что, в отличие от известных конструкций, грузовое звено инерционного трансформатора, являющееся одновременно одним из рычагов, связывающих кривошипы ведущего и промежуточного валов выполнено с центром масс, находящимся за пределами общего шарнира рычагов. Указанный перенос центра масс грузового звена приводит к тому, что и в цикле разгона и в цикле торможения центра масс грузового звена силы, возникающие на кривошипе промежуточного вала, направлены в одну сторону, а обратный импульс на промежуточном отсутствует. Отсутствие обратного импульса момента вращения на промежуточном валу позволяет упростить конструкцию импульсного трансформатора, исключив механизмы свободного хода как избыточный элемент, и объединить промежуточный и ведомый вал, поскольку их разобщение через механизмы свободного хода не требуется.
Достигаемый технический результат заключается в упрощении конструкции, повышении ресурса и области допустимых оборотов и крутящих моментов, передаваемых через импульсный трансформатор.
Частично достигаемый технический результат заключается также в том, что предлагаемый инерционный трансформатор позволяет передавать крутящий момент в любом направлении - ведомый вал может функционировать в качестве ведущего, а также возможно реверсирование направления вращения валов, невозможное при использовании механизмов свободного хода, как это имеет место в известных технических решениях. Данная возможность расширяет область возможного применения предлагаемого инерционного трансформатора.
Суть изобретения заключается в том, что изменение положения центра масс рычага - грузового звена приводит к тому, что силы, возникающие на кривошипе промежуточного вала в процессе разгона и торможения грузового звена оказываются направлены в одну сторону, и это позволяет объединить промежуточный и ведомый вал без использования механизмов свободного хода. (Далее считается, что промежуточный и ведомый вал - это ведомый вал). В процессе разгона и в процессе торможения центра масс грузового звена общий шарнир рычагов оказывается в положении между кривошипом ведомого вала и центром масс грузового звена, но с противоположных сторон траектории движения кривошипа ведомого вала. В процессе торможения центра масс грузового звена через общий шарнир рычагов центр масс грузового звена, стремясь сохранить абсолютную скорость движения в пространстве, стремится провернуть рычаг - грузовое звено вокруг общего шарнира рычагов, и направление передаваемой силы инерции центра масс на противолежащем от центра масс шарнире оказывается тем же самым, что и при разгоне центра масс грузового звена. Данный эффект - совпадение направления сил, возникающих на кривошипе ведомого вала при разгоне и торможении центра масс грузового звена достигается ранее неизвестной совокупностью признаков «система из по меньшей мере одной пары рычагов, имеющих общий шарнир, связывающих кривошипы ведущего и ведомого валов, при этом центр масс одного из рычагов выполнен за пределами общего шарнира рычагов» позволяет достигнуть заявленного технического результата, то есть исключить из конструкции механизмы свободного хода.
Несмотря на то, что рычаг с центром масс, выполненный за пределами шарниров, известен (Механические импульсные передачи. В.Ф.Мальцев. Издание третье. Москва. «Машиностроение». 1978 г. Стр.65. Рис.23.), в указанном источнике один из шарниров рычага неподвижен в пространстве и не проявляет свойств, проявляемых в предлагаемом техническом решении. Это позволяет сделать вывод о принципиальной новизне и неизвестности ранее совокупности признаков «система из по меньшей мере одной пары рычагов, имеющих общий шарнир, связывающих кривошипы ведущего и ведомого валов, при этом центр масс одного из рычагов выполнен за пределами общего шарнира рычагов», так как в обеих указанных конструкциях инерционного трансформатора для передачи вращения ведомому валу в одном направлении используются механизмы свободного хода.
Предлагаемое техническое решение иллюстрируется чертежами Фиг.1 - Фиг.6.
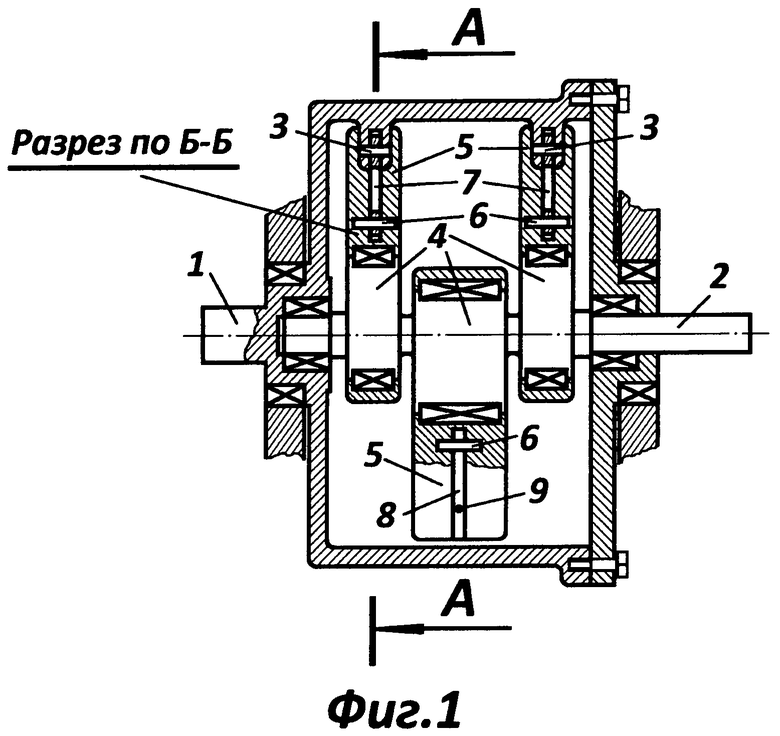
На Фиг.1 изображен комбинированный разрез устройства в виде сбоку.
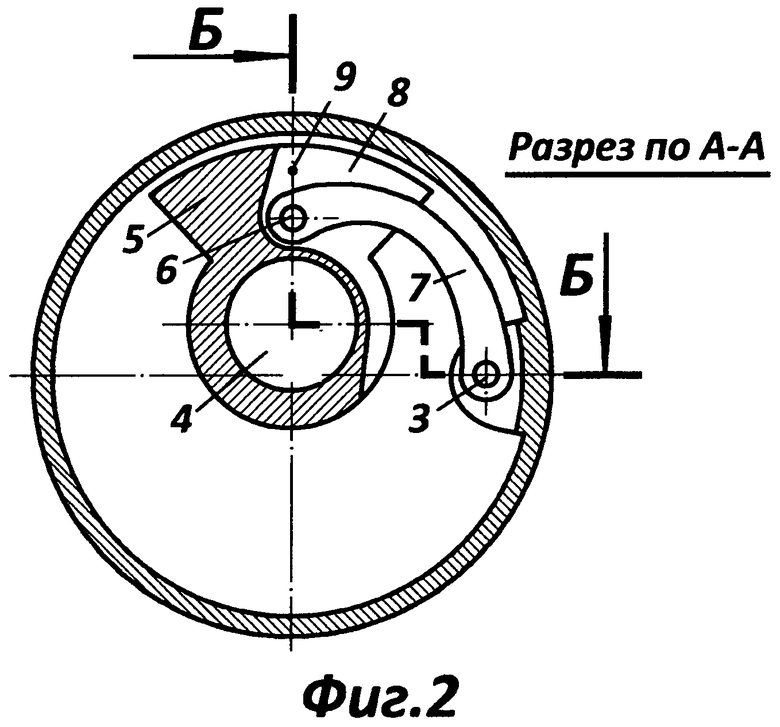
На Фиг.2 изображен фронтальный вид устройства в разрезе.
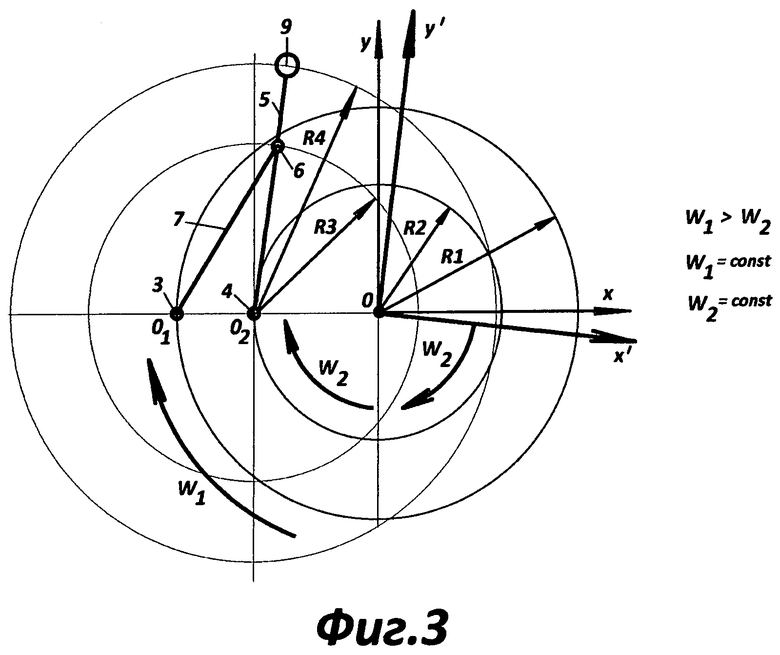
На Фиг.3 изображена кинематическая схема устройства.
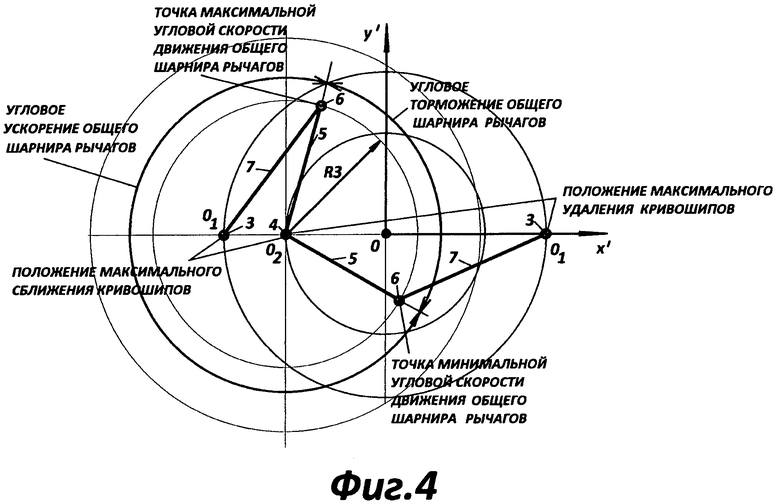
На Фиг.4 изображена кинематическая схема устройства с указанием фазы разгона и фазы торможения общего шарнира рычагов.
На фиг.5 изображена кинематическая схема устройства в фазе разгона центра масс грузового звена.
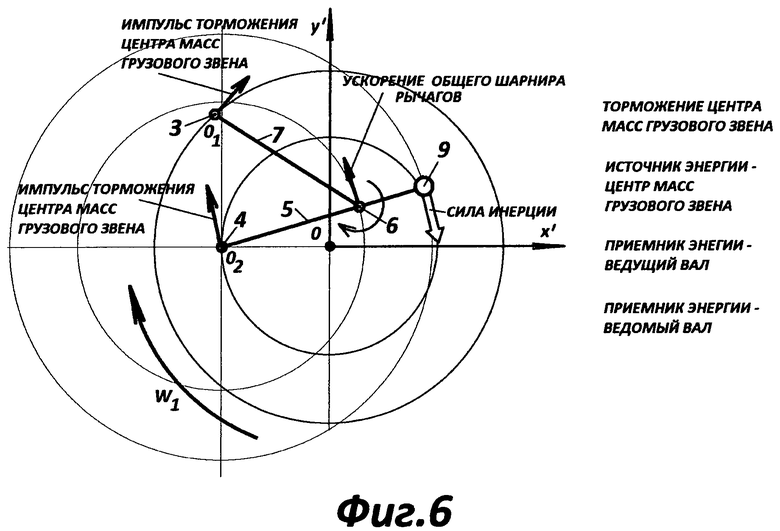
На Фиг.6 изображена кинематическая схема устройства в фазе торможения центра масс грузового звена.
На Фиг.1 изображен комбинированный разрез устройства в виде сбоку.
На Фиг.2 изображен фронтальный разрез устройства.
Фиг.1, 2 необходимо рассматривать совместно.
Ведомый вал устройства имеет возможность функционирования в качестве ведущего вала, поэтому название валов носит условный характер.
Устройство содержит расположенные соосно ведущий вал 1 и ведомый вал 2, имеющие возможность вращения в подшипниковых гнездах неподвижных корпусных деталей (изображены условно). Вал 1 выполнен заодно с разборным полым цилиндрическим барабаном, на внутренней поверхности которого выполнены шарниры, пальцы 3 которых выполняют функцию кривошипов ведущего вала 1.
Внутри барабана, также с возможностью вращения в подшипниковых узлах, установлен коленчатый ведомый вал 2, выполненный с тремя шатунными шейками (или кривошипами) 4, две наружные шейки которого имеют смещение на половину оборота относительно центральной шейки. На шатунных шейках 4 установлены с возможностью вращения относительно шеек 4 рычаги - грузовые звенья 5 (также Фиг.2 - разрез по А-А), имеющие общий палец 6 шарнира с рычагом 7, имеющим также общий палец 3 с шарниром, выполненным на внутренней поверхности барабана. В теле грузовых звеньев 5 выполнены профилированные пазы 8, которые совместно с криволинейной формой рычагов 7 позволяют свободное вращение валов 1,2 относительно друг друга без заклинивания. Центр 9 массы каждого грузового звена 5 расположен в теле грузового звена 5 за пределами шарнира 6 (общего шарнира рычагов). Конструкция всех трех грузовых звеньев идентична. Масса центрального грузового звена 5 выбрана равной массе суммы наружных грузовых звеньев 5 для статической и динамической балансировки устройства.
На Фиг.1 выше оси вращения валов 1, 2 совмещены разрезы по оси симметрии вала 2, оси симметрии наружных грузовых звеньев 5 и пальцев 3. Линия разреза показана на Фиг.2 как разрез по Б-Б. Истинное положение шеек 4, грузового звена 5, рычагов 7 и шарниров 3 для одного грузового звена изображено на Фиг.2.
Палец 3 и шарнир среднего грузового звена на Фиг.1 находятся перед поверхностью разреза и не видны. Рычаг 7 среднего грузового звена не показан (удален).
Все узлы вращения изображены условно и упрощенно, подразумевается использование подшипников качения.
На Фиг.3 изображена кинематическая схема предлагаемого устройства для одного грузового звена.
В прямоугольной системе координат X0Y, полагаем, что центр 0 совпадает с осью вращения валов 1, 2. Тогда палец 3 (центр 01) имеет возможность перемещения по окружности радиуса R1 при вращении вала 1.
Шатунная шейка 4 (центр 02) имеет возможность перемещения по окружности радиуса R2 при вращении вала 2. Вокруг, пальца 3, полагая его ось симметрии также центром вращения 01 имеет возможность вращения рычаг 7.
Вокруг шатунной шейки 4, полагая ее ось симметрии также центром 02, имеет возможность вращения рычаг 5, являющийся грузовым звеном, при этом палец 6 - общий шарнир рычагов, будет двигаться по окружности радиуса R3, а центр масс 9 рычага 5 будет двигаться по окружности радиуса R4.
Рычаг 7 имеет общий шарнир 6 с рычагом 5.
Предположим, что валы 1, 2 вращаются с некоторой постоянной скоростью, при этом
W1>W2, где W1 - угловая скорость вала 1, W2 - угловая скорость вала 2. Введем дополнительную систему координат X'0Y', вращающуюся относительно системы X0Y с угловой скоростью W2, в которой центр 02 (шейка 4 вала 2) будет неподвижен.
Далее см. Фиг.4.
Центр масс 9 рычага 5 для упрощения не показан.
Примем исходным положение, когда центры 01 (палец 3) и 02 (шейка 4) лежат на оси - 0Х' (минус 0Х'), центры 01 и 02 будут иметь максимальное сближение, а рычаги 5, 7 обращены вверх.
Предположим, что вал 1 равномерно вращается.
Тогда через половину оборота вала 1 центр 01 будет лежать на оси +0Х', и центры 01 и 02 будут иметь максимальное удаление, а рычаги 5,7 обращены вниз.
Положение максимального сближения кривошипов (центры 01 и 02 лежат на оси минус 0Х') соответствует максимальной угловой скорости движения общего шарнира 6 рычагов 5, 7 при равномерном вращении вала 1.
Положение максимального удаления кривошипов (центр 02 лежит на оси минус 0Х', центр 01 лежит на оси +0Х') соответствует минимальной угловой скорости движения общего шарнира 6 рычагов 5, 7 при равномерном вращении вала 1.
Соответственно, можно выделить фазу углового ускорения общего шарнира 6 рычагов 5, 7 и фазу углового торможения общего шарнира 6 рычагов, а также точки максимальной и минимальной скорости общего шарнира 6 рычагов, обозначенные на Фиг.4.
Следует отметить, что при любом соотношении угловых скоростей валов 1, 2 в пределах W1>W2 (включая W2=0), W1=const, W2=const в системе координат X'0Y' фазы разгона и торможения общего шарнира 6 рычагов 5, 7 расположены одинаково.
Работа устройства рассматривается для одного грузового звена.
При моменте нагрузки, равном нулю, центр масс 9 рычага 5 занимает наиболее удаленное от оси вращения валов 1, 2 положение и валы 1, 2 вращаются заодно. При моменте нагрузки, большем, чем конструктивно заданный передаваемый момент ведущему валу, вал 2 заторможен, и рычаг 5 обращается вокруг шейки 4 с периодическим ускорением и торможением центра масс 9, передавая при этом крутящий момент ведомому валу 2. Энергия, затрачиваемая на разгон центра масс 9 рычагов 5 в процессе торможения центра масс 9 возвращается ведущему валу 1 через рычаг 7 и палец 3.
При моменте нагрузки, имеющем значение больше ноля, но меньшим конструктивно заданного момента при данных оборотах ведущего вала 1, ведомый вал 2 приходит во вращение, при этом W1>W2.
При этом кривошип 3 ведущего вала, перемещаясь по окружности, периодически сближается и удаляется от кривошипа 4 ведомого вала, вследствие чего общий шарнир 6 рычагов 5, 7 связывающих кривошипы 3, 4 имеет фазу углового ускорения шарнира 6 и фазу уменьшения угловой скорости.
В фазе углового ускорения шарнира 6 (Фиг.5) момент вращения ведущего вала, приложенный через кривошип 3 и рычаг 7 к общему шарниру 6 рычагов 5,7 разгоняет центр масс 9 рычага 5, при этом рычаг 5 стремится провернуться под действием сил инерции центра масс 9 и сила, возникающая на противолежащей центру масс 9 стороне рычага 5 и кривошипе 4 ведомого вала, оказывается направленной по направлению вращения кривошипа 3 ведущего вала.
В фазе уменьшения угловой скорости шарнира 6 (Фиг.6) центр масс 9 рычага 5, имея избыток кинетической энергии в виде абсолютной скорости движения центра масс в пространстве, накопленный в предыдущей фазе разгона, под действием сил инерции стремится опередить замедляющееся движение шарнира 6 и провернуть рычаг 5 вокруг шарнира 6. При этом сила, возникающая на противолежащей от центра масс 9 стороне рычага 5 и кривошипе 4 ведомого вала оказывается направленной так же, как и в предыдущей фазе ускорения общего шарнира 6 рычагов 5, 7, а сила, передаваемая через рычаг 7 кривошипу 3 ведущего вала, оказывается направленной по направлению вращения ведущего вала. Вследствие этого ранее накопленная кинетическая энергия центра масс 9 рычага 5 в фазе уменьшения угловой скорости шарнира 6 частично расходуется на вращение кривошипа 4 ведомого вала, а частично возвращается через рычаг 7 и кривошип 3 ведущему валу.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИМПУЛЬСНАЯ БЕССТУПЕНЧАТАЯ ПЕРЕДАЧА | 2000 |
|
RU2179674C2 |
| УСТРОЙСТВО ДЛЯ УПЛОТНЕНИЯ ГРУНТА | 2015 |
|
RU2583802C1 |
| Инерционный гидродифференциальный трансформатор вращающего момента | 1980 |
|
SU1028924A1 |
| БЕЗИНЕРЦИОННЫЙ ТРАНСФОРМАТОР ВРАЩАЮЩЕГО МОМЕНТА ШАШКИНА | 1992 |
|
RU2073805C1 |
| РОТОРНАЯ МАШИНА | 1997 |
|
RU2135777C1 |
| ОДНОКОЛЕЙНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 1993 |
|
RU2066651C1 |
| ТРАНСФОРМАТОР ВРАЩАЮЩЕГО МОМЕНТА ШАШКИНА | 1992 |
|
RU2073804C1 |
| Инерционная муфта Б.Ф.Кочеткова | 1991 |
|
SU1821583A1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ДВИЖЕНИЯ В КУЛИСНОМ МЕХАНИЗМЕ И КУЛИСНЫЙ МЕХАНИЗМ ГОРБАНЯ-БРОДОВА | 1998 |
|
RU2133832C1 |
| РЫЧАЖНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМ ДЛИТЕЛЬНЫМ ВЫСТОЕМ | 2023 |
|
RU2836248C1 |
Изобретение относится к области инерционных трансформаторов и может найти широкое применение в автомобилестроении. Инерционный трансформатор содержит систему из соосно расположенных ведущего (1) и ведомого (2) валов и по меньшей мере одной пары рычагов. Пара рычагов имеет общий шарнир и связывает кривошипы ведущего (1) и ведомого (2) валов, а один из рычагов выполняет роль грузового звена (5). Грузовое звено (5) выполнено с центром (9) масс, находящимся за пределами общего шарнира рычагов и установлено на кривошипе ведомого (2) вала с возможностью кругового вращения при заторможенном ведомом (2) валу. Обеспечивается упрощение конструкции, а также повышение ресурса и области допустимых оборотов и крутящих моментов, передаваемых через импульсный трансформатор. 6 ил.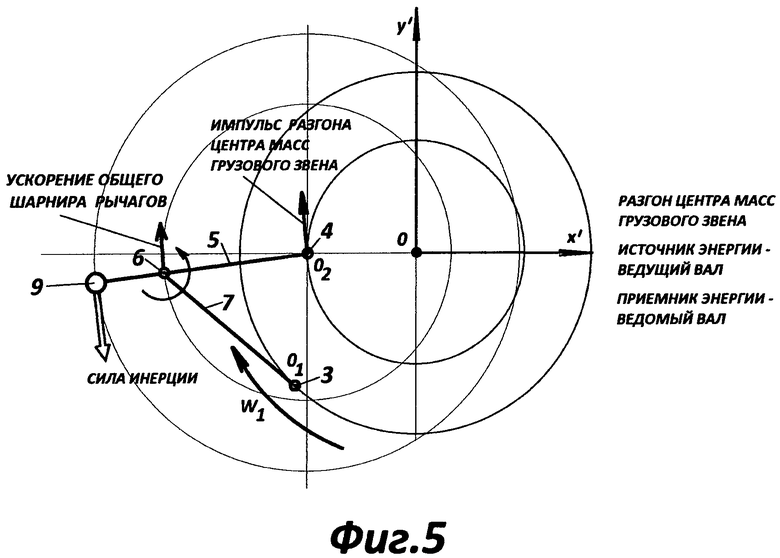
Инерционный трансформатор, содержащий систему из соосно расположенных ведущего и ведомого валов и по меньшей мере одной пары рычагов, имеющих общий шарнир и связывающих кривошипы ведущего и ведомого вала, при этом один из рычагов выполняет роль грузового звена, отличающийся тем, что рычаг - грузовое звено выполнен с центром масс, находящимся за пределами общего шарнира рычагов и установлен на кривошипе ведомого вала с возможностью кругового вращения при заторможенном ведомом валу устройства.
| Инерционно-импульсная передача | 1986 |
|
SU1404716A1 |
| В.Ф.Мальцев "Механические импульсные передачи" | |||
| М.Машиноностроение, 1978 | |||
| Инерционный вибровозбудитель момента | 1984 |
|
SU1196037A1 |
| ИМПУЛЬСНЫЙ МЕХАНИЗМ ИНЕРЦИОННОГО ТРАНСФОРМАТОРА КРУТЯЩЕГО МОМЕНТА | 0 |
|
SU174044A1 |

