Изобретение относится к области автоматики и может быть использовано для создания аппаратуры, служащей для предотвращения столкновений автомобилей и других транспортных средств.
Известен автомобильный регистратор дорожно-транспортных происшествий [1], который осуществляет определение возникновения дорожно-транспортных происшествий (ДТП). Недостатком использования такого регистратора является то, что он не предотвращает ДТП, в частности не осуществляет сигнализацию об опасности столкновения транспортных средств.
Наиболее близким к предлагаемой системе (прототипом) является система идентификации транспортных средств, противоправно вторгшихся на выделенную полосу. Данная система содержит установленные на патрулирующем транспортном средстве видеорегистратор, соединенный с видеобуфером устройства хранения данных, блок анализа изображения, соединенный с видеорегистратором, устройством хранения данных и модулем принятия решения и фиксации, соединенный с видеорегистратором и блоком управления и инициализации, соединенным с устройством хранения данных, которое также содержит буфер распознанных номеров. Видеорегистратор выполнен с возможностью формирования видеоизображения и отдельных фотокадров передней ближней зоны обзора с разрешением, достаточным для распознавания дорожной разметки и знаков, а также впереди идущих транспортных средств и их данных; блок анализа изображения выполнен с возможностью анализа видеоизображения и отдельных фотокадров, при этом выделения и распознавания дорожной разметки и дорожных знаков, впереди идущих транспортных средств и их данных, а также с возможностью передачи распознанных данных в модуль принятия решения и фиксации; блок управления и инициализации выполнен с возможностью получения выбранных пользователем внешних условий определения незаконного вторжения на выделенную полосу, а именно условия автоматического анализа или анализа вручную, а также с возможностью передачи выбранных пользователем внешних условий в модуль принятия решения и фиксации, который выполнен с возможностью определения факта движения патрулирующего транспортного средства по выделенной полосе автоматически путем анализа предустановленных координат или дорожной разметки и дорожных знаков, обозначающих выделенную полосу, а также с возможностью определения факта незаконного вторжения впереди идущего транспортного средства на выделенную полосу, либо автоматически путем анализа набора признаков, включающего предустановленные координаты или дорожную разметку и дорожные знаки, обозначающие разрешенные/запрещенные для движения частного транспорта участки выделенной полосы, государственный регистрационный номер впереди идущего транспортного средства, обозначающий его тип (частное или нет), световые сигналы левого или правого поворота, обозначающие намерение впереди идущего транспортного средства покинуть выделенную полосу на ее участке, допустимом для перестроения, либо вручную по сигналу водителя патрулирующего транспортного средства; видеобуфер и буфер распознанных номеров выполнены с возможностью циклической записи в видеоданных, отдельных данных, включая временные метки, и метаданных, поступающих с видеорегистратора, а также с блоков и модулей системы [2].
Недостатком данной системы является то, что она осуществляет распознавание возможности столкновения, основываясь на координатах дорожной разметки и знаках. При этом нет четких критериев прогноза возможности столкновения за некоторое время до столкновения. В связи с этим может быть затруднена заблаговременная сигнализация о возможном столкновении транспортных средств.
Предлагаемое устройство предупреждения о возможном столкновении с транспортным средством, движущимся по встречной полосе, позволяет устранить указанные недостатки прототипа.
Работа устройства основана на следующем подходе.
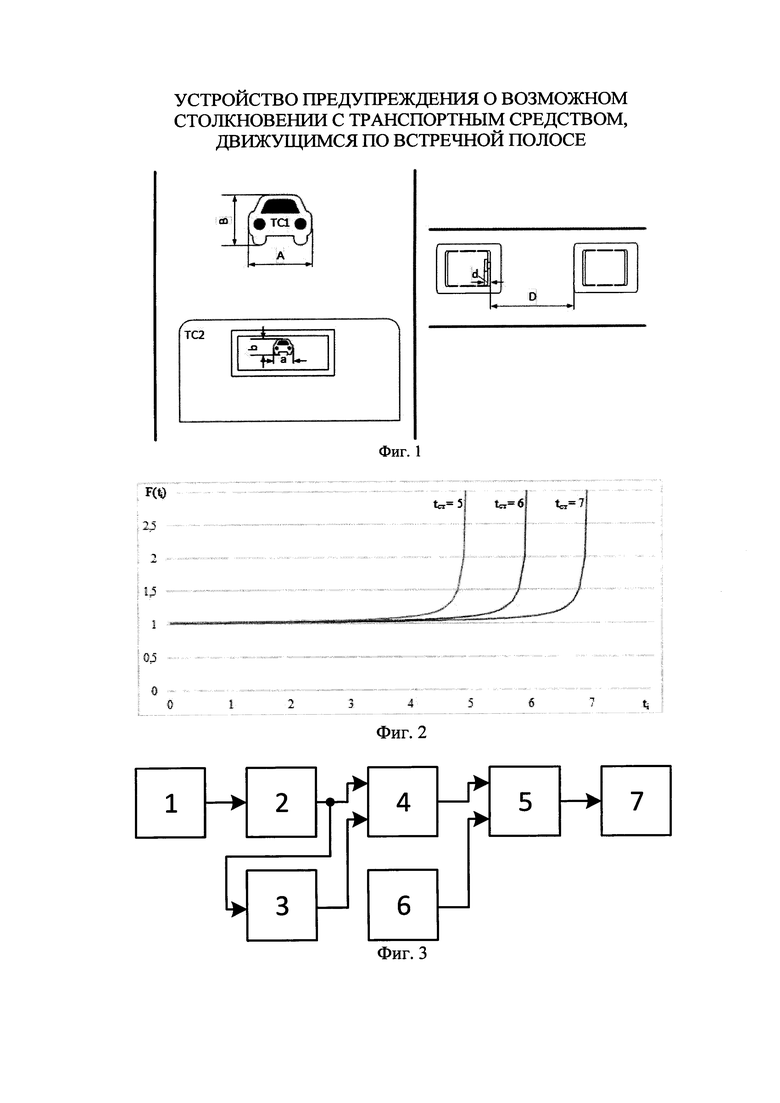
Рассмотрим транспортные средства ТС1 и ТС2, движущиеся навстречу друг другу со скоростями V1 и V2 соответственно. Линейные размеры ТС1, т.е. ширину и высоту, примем равными A и B соответственно. Расстояние между ТС1 и ТС2, являющейся переменной величиной, обозначим как D (фиг. 1).
Пусть на ТС2 установлен видеорегистратор, на котором линейные размеры образа ТС1, т.е. ширина и высота, имеют значения a и b соответственно. Расстояние от линзы объектива до экрана в видеорегистраторе ТС2 примем равным d.
При сближении объектов линейные размеры образа ТС1 на экране видеорегистратора увеличиваются.
Из подобия треугольников, образованных основанием и высотой ТС1 и аналогичными элементами образа его изображения, следует, что
 и
и  .
.
Тогда
 и
и  .
.
Обозначим c1=A⋅d и c2=B⋅d. Тогда

Поскольку величины c1 и c2 являются постоянной величиной, то линейные размеры a и b изображения образа ТС1 на экране обратно-пропорциональны расстоянию D между ТС1 и ТС2.
Расстояние D между ТС1 и ТС2 за время t определяется скоростью Vсбл их сближения по формуле:

где D0 - расстояние между ТС1 и ТС2 в момент времени t=0.
Скорость сближения транспортных средств может быть рассчитана по формуле:
Vсбл=V1+V2.
Очевидно, что в момент столкновения ТС1 и ТС2, т.е. при t=tст, расстояние между ТС1 и ТС2 будет равно 0, т.е. D(tст)=0. Тогда из формулы (2) следует, что
D0-Vсбл⋅tст=0, а
D0=Vсбл⋅tст.
Полученное выражение подставим в формулу (2) и после преобразования получим:

Формулу (1) зависимости линейных размеров образа ТС1 на экране от расстояния между ТС1 и ТС2 с учетом зависимости (3) можно представить в виде:

Предположим, что скорость сближения за короткое время изменяется незначительно, т.е. Vсбл=const. Тогда формула (4) зависимости линейных размеров на экране при сближении ТС1 и ТС2 примет вид:

где  .
.
Допустим, что измерение линейных размеров изображения ТС1 на экране происходит через равные промежутки времени Δt. Тогда отношение F(ti) линейных размеров образа TC1 на экране в текущий момент времени ti к предыдущему ti-1 в соответствии с выражением (5) будет равно

При сближении объектов a(ti) больше a(ti-1), соответственно F(ti) изменяется от 1 до бесконечно большого числа. На фиг. 2 представлена серия кривых зависимостей F(ti) при разных значениях tст и Δt=0,1.
Пусть в момент времени t=tпр происходит заблаговременная сигнализация о столкновении транспортных средств ТС1 и ТС2. Из формулы (5) следует, что в этот момент величина линейных размеров ТС1 на экране видеорегистратора будет равна
 .
.
В этот же момент времени из формулы (6) следует, что отношение текущей величины линейных размеров образа ТС1 на экране и предыдущей будет иметь вид:

Как видно из формулы (7) величина Fпр не зависит ни от скорости сближения транспортных средств, ни от габаритов транспортного средства, движущегося навстречу, а определяется лишь промежутком времени заблаговременного предупреждения водителя о столкновении tст-tпр и периодом Δt повторения измерения отношения линейных размеров образа изображения ТС1 на экране видеорегистратора в текущий и предыдущий момент времени.
Следовательно, вычисляя отношение F(ti) величины текущих линейных размеров образа ТС1 на экране видеорегистратора к предыдущим и сравнивая это отношение с отношением для момента предупреждения о столкновении Fпр, можно заблаговременно предупредить водителя об опасной ситуации и тем самым снизить вероятность возникновения ДТП.
Например, если промежуток времени для заблаговременного предупреждения водителя о столкновении выбрать равным tст-tпр=3 с, а измерение линейных размеров на экране видеорегистратора производить через Δt=0,5 с, то в момент предупреждения о столкновении отношение величины текущих линейных размеров образа ТС1 к предыдущим будет не менее Fпр=1+0,5/3=1+0,167=1,167. В таком случае сигнализировать о возможном столкновении следует, если F(ti) будет равно или превысит значение 1,167.
Если в программе по обработке сигналов с видеорегистратора предусмотреть выделение контура образа автомобиля, движущегося по встречной полосе, а затем вычислить площадь S(ti) этого контура и измерять отношение текущего значения площади контура с его предыдущим значением S(ti-1):
 ,
,
то вполне очевидно, что это отношение площадей будет находиться в квадратичной зависимости относительно значения tст-tпр.
Таким образом, если постоянно измерять отношение линейных размеров или площади контуров образа автомобиля на экране видеорегистратора, движущегося по встречной полосе, и сравнивая его с заданным значением, можно заблаговременно предупредить водителя о возможном столкновении с ним и тем самым предотвратить ДТП.
Сущность изобретения поясняется следующим графическим материалом:
- фиг. 1 - схема движения транспортных средств;
- фиг. 2 - серия кривых зависимостей F(ti) при разных значениях tст и Δt=0,1.
- фиг. 3 - функциональная схема устройства.
Для достижения технического результата, заключающегося в повышении эффективности предупреждения о столкновении транспортных средств, движущихся по встречной полосе, в устройство, содержащее видеорегистратор, соединенный с блоком анализа изображения, который соединен с устройством хранения данных, дополнительно введены блок отношения, блок сравнения, блок порогового уровня, блок сигнализации, причем блок анализа изображений выполнен с возможностью распознавания контура впереди идущего транспортного средства и определения значения площади выделенного контура, являющегося выходным сигналом блока, устройство хранения данных осуществляет хранение входных значений и подачу на выход значения, которое было на входе этого устройства Δt секунд (0,001≤Δt≤0,5) назад относительно текущего момента времени, выход блока анализа изображения и выход устройства хранения данных соединены с входами блока отношения, выход которого подключен к первому входу блока сравнения, блок порогового уровня соединен со вторым входом блока сравнения, выход блока сравнения подключен к блоку сигнализации.
Устройство состоит (фиг. 2) из видеорегистратора 1, блока 2 анализа изображения, устройства 3 хранения данных, блока 4 отношения, блока 5 сравнения, блока 6 порогового уровня, блока 7 сигнализации.
Устройство предупреждения о возможном столкновении с транспортным средством, движущимся по встречной полосе, содержит видеорегистратор 1, соединенный с блоком 2 анализа изображения, который соединен с устройством 3 хранения данных, выход блока 2 анализа изображения и выход устройства 3 хранения данных соединены с входами блока 4 отношения, выход которого подключен к первому входу блока 5 сравнения, блок 6 порогового уровня соединен со вторым входом блока 5 сравнения, выход блока 5 сравнения подключен к блоку 7 сигнализации.
Предлагаемое устройство предупреждения о возможном столкновении с транспортным средством, движущимся по встречной полосе, установленное на транспортном средстве работает следующим образом.
Изображение дорожной ситуации, получаемое с видеорегистратора 1, поступает на блок 2 анализа изображений, где по изображению происходит распознавание наличия впереди идущего транспортного средства. Если такое транспортное средство обнаружено, то происходит выделение его контура и вычисление площади этого контура. Значение площади формируется на выходе блока 3 и поступает на вход устройства 3 хранения данных, где сохраняется в памяти. Аналогичным образом в памяти сохраняются другие поступающие значения площадей контуров для других моментов времени. На выходе устройства 3 формируется сигнал, который равен входному сигналу этого устройства 3 Δt секунд (0,001≤Δt≤0,5) назад относительно текущего момента времени. Выходные сигналы блока 2 и устройства 3 поступают на входы блока 4 отношения, который выполняет операцию деления первого сигнала на второй. Полученный результат является выходным сигналом блока 4 и поступает на первый вход блока 5 сравнений, который осуществляет его сравнение с пороговым уровнем, поступающим на второй вход от блока 6 порогового уровня. При приближении транспортного средства результат отношения площадей контуров начинает возрастать. Если расстояние между транспортными средствами становится меньше критического, то результат отношения превышает пороговый уровень, задаваемый блоком 6, и на выходе блока 5 сравнения появляется логический сигнал высокого уровня. Этот сигнал поступает в блок 7 сигнализации, в результате чего происходит оповещение водителя о возможном столкновении с впереди идущим транспортным средством.
Вариант реализации блоков предложенного устройства. Блок 2 анализа изображений может быть реализован на основе микропроцессорного устройства, которое осуществляет сравнение полученного от видеорегистратора 1 изображения с эталонами, например, корреляционными методами [3]. Устройство 3 хранения данных можно реализовать на основе кольцевого буфера FIFO, который через каждый момент времени Δt запоминает входные значения в ячейках в соответствии с положением указателя, а на выходе формируется значение, взятое из предыдущей ячейки [4]. Блок 4 отношения может быть выполнен либо на микропроцессорном устройстве, либо на дискретных элементах цифровой техники [4]. Блок 5 сравнения можно реализовать на основе компаратора, блок 6 порогового уровня - на основе генератора постоянного напряжения, блок 7 сигнализации - на основе устройств световой (например, светодиода) и звуковой (например, звукового динамика) сигнализации.
Технико-экономический эффект предложенного устройства заключается в сигнализации возможного столкновения транспортных средств, что позволит предотвратить лобовое столкновение с транспортным средством, выехавшим на встречную полосу. Эффективность обнаружения и прогнозирования возможности столкновения достигнута за счет выделения контура транспортного средства на изображении, полученного с видеорегистратора и определения отношения площадей двух выделенных контуров, полученных в разные моменты времени.
Литература
1. Патент на полезную модель RU №127498 U1 «Автомобильный регистратор дорожно-транспортных происшествий» 2013.
2. Патент на полезную модель RU №127219 U1 «Система идентификации транспортных средств, противоправно вторгшихся на выделенную полосу» 2013.
3. Фисенко В.Т., Фисенко Т.Ю. Компьютерная обработка и распознавание изображений: учеб. пособие. - СПБ: СПБГУ ИТМО, 2008.
4. Угрюмов Е.П. Цифровая схемотехника. СПб.: БХВ - Санкт-Петербург, 2000. - 89 с.
Изобретение относится к области автоматики и может быть использовано для создания аппаратуры, служащей для предотвращения столкновений автомобилей и других транспортных средств. Устройство предупреждения о возможном столкновении с транспортным средством, движущимся по встречной полосе, установленное на транспортном средстве и содержащее видеорегистратор, соединенный с блоком анализа изображения, который соединен с устройством хранения данных. Блок анализа изображений выполнен с возможностью распознавания контура впереди идущего транспортного средства и определения значения площади выделенного контура, являющегося выходным сигналом блока, устройство хранения данных осуществляет хранение входных значений и подачу на выход значения, которое было на входе этого устройства Δt секунд (0,001≤Δt≤0,5) назад относительно текущего момента времени. Выход блока анализа изображения и выход устройства хранения данных соединены с входами блока отношения, выход которого подключен к первому входу блока сравнения, блок порогового уровня соединен со вторым входом блока сравнения, выход блока сравнения подключен к блоку сигнализации. Обеспечивается заблаговременное оповещение водителя о возможном столкновении. 3 ил.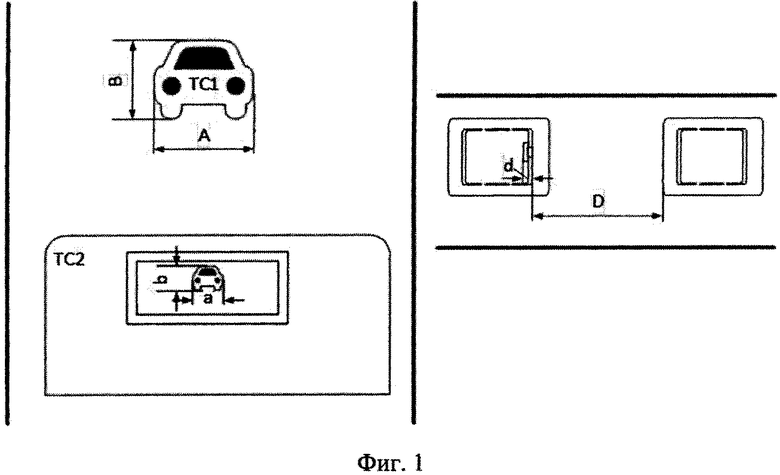
Устройство предупреждения о возможном столкновении с транспортным средством, движущимся по встречной полосе, установленное на транспортном средстве и содержащее видеорегистратор, соединенный с блоком анализа изображения, который соединен с устройством хранения данных, отличающееся тем, что в систему дополнительно введены блок отношения, блок сравнения, блок порогового уровня, блок сигнализации, причем блок анализа изображений выполнен с возможностью распознавания контура впереди идущего транспортного средства и определения значения площади выделенного контура, являющегося выходным сигналом блока, устройство хранения данных осуществляет хранение входных значений и подачу на выход значения, которое было на входе этого устройства Δt секунд (0,001≤Δt≤0,5) назад относительно текущего момента времени, выход блока анализа изображения и выход устройства хранения данных соединены с входами блока отношения, выход которого подключен к первому входу блока сравнения, блок порогового уровня соединен со вторым входом блока сравнения, выход блока сравнения подключен к блоку сигнализации.
| Способ ведения вскрышных работ | 1959 |
|
SU127219A1 |
| Самолет | 1929 |
|
SU17016A1 |
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2543123C2 |

