Изобретение относится к кораблестроению и может быть использовано как при выполнении движения подводной лодки, так и при выполнении маневренности ее в ограниченной водной зоне.
Известна подводная лодка (см. заявку №2012139975 RU), включающая корпус с двумя ходовыми винтами в кормовой части, при этом введена дополнительная подводная лодка с компьютерным управлением с двумя ходовыми винтами в кормовой ее части, в которой расположено стыковочное устройство с носовой частью основной подводной лодки (прототип).
Известный прототип имеет технологические возможности, которые заключаются в том, что можно выполнять маневр подводной лодки в горизонтальной плоскости.
Недостатком известного технологического решения является ограниченность маневра подводной лодки, поскольку он не может быть выполнен в любом направлении. При этом к недостатку технологического решения может быть отнесено позиционное положение ходовых винтов, поскольку при движении подводной лодки в кормовой ее части формируется пониженное давление водной среды, что приводит к необходимости увеличения скорости оборотов ходовых винтов, что в конечном счете увеличивается эффект кавитации.
Технологическим результатом предложенного изобретения является повышение маневренности двух функционально связанных подводных лодок.
Указанный технологический результат достигается следующим способом.
Способ повышения маневренности подводной лодки, включающий корпус основной подводной лодки с экипажем и ходовыми винтами в кормовой ее части, носовую часть которой функционально связывают стыковочным устройством с кормовой частью дополнительной подводной лодки с дистанционным управлением, при этом носовую часть основной подводной лодки выполняют комбинированной полусферической формы и соосной конической частью в передней ее части, которую располагают внутри ее полусферической части, где располагают стыковочное устройство с возможностью разворота в любом направлении относительно оси основной подводной лодки, к которому зафиксирована внутренняя коническая часть дополнительной подводной лодки, которая зафиксирована основанием конической части внутри ее для совместного разворота в любом направлении.
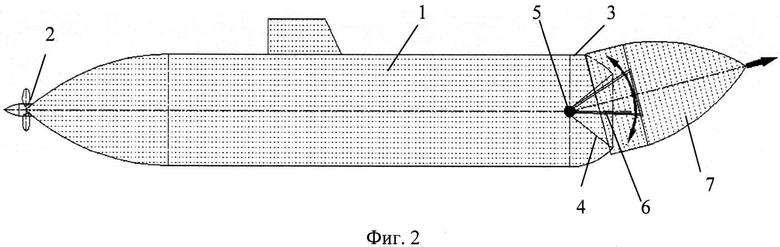
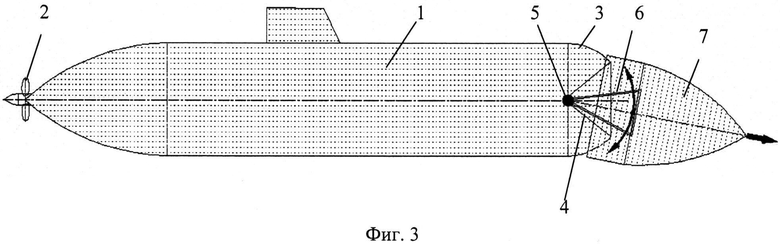
На фиг.1-3 изображена схемная реализация предложенного способа повышения маневренности подводной лодки, и она включает корпус основной подводной лодки 1 с экипажем и гребным винтом 2 в кормовой его части, носовую часть, которая выполнена комбинированной полусферической формы 3 и соосной конической частью 4 в передней ее части, которая расположена внутри полусферической части 3, где располагают стыковочное устройство 5 с возможностью разворота в любом направлении относительно оси основной подводной лодки 1, к которому зафиксирована внутренняя коническая часть 6 дополнительной подводной лодки 7, и она зафиксирована основанием конической части 6 внутри ее для совместного разворота дополнительной подводной лодки 7 в любом направлении.
Реализуется предложенный способ повышения маневренности подводной лодки следующим образом.
Для повышения маневренности подводной лодки 1, в которой кормовую часть выполняют с грибным винтом, при этом носовую часть основной подводной лодки выполняют комбинированной полусферической формы 3 и соосной конической частью 4 в передней ее части, которую располагают внутри полусферической части 3, где располагают стыковочное устройство 5 с возможностью разворота в любом направлении относительно оси основной подводной лодки 1, к которому зафиксирована внутренняя коническая часть 6 дополнительной подводной лодки 7, которая зафиксирована основанием конической части внутри нее для совместного разворота в любом направлении при выполнении маневра (фиг.2 и 3), и такая функциональная структура дополнительной подводной лодки 7 позволяет существенно повысить маневренность основной подводной лодки.
Использование предложенного технологического решения позволяет существенно увеличить маневренность подводной лодки.
Изобретение относится к области кораблестроения и может быть использовано при выполнении маневра подводной лодки. Предложен способ повышения маневренности подводной лодки, включающей корпус основной подводной лодки с экипажем и ходовыми винтами в кормовой ее части, носовую часть которой функционально связывают стыковочным устройством с кормовой частью дополнительной подводной лодки с дистанционным управлением. Носовую часть основной подводной лодки выполняют комбинированной полусферической формы и соосной конической частью в передней ее части, которую располагают внутри ее полусферической части, где располагают стыковочное устройство с возможностью разворота в любом направлении относительно оси основной подводной лодки, к которому зафиксирована внутренняя коническая часть дополнительной подводной лодки, которая зафиксирована основанием конической части внутри нее для совместного разворота в любом направлении. Технический результат заключается в улучшении маневренных характеристик подводной лодки. 3 ил.
Способ повышения маневренности подводной лодки, включающей корпус основной подводной лодки с экипажем и ходовыми винтами в кормовой ее части, носовую часть которой функционально связывают стыковочным устройством с кормовой частью дополнительной подводной лодки с дистанционным управлением, отличающийся тем, что носовую часть основной подводной лодки выполняют комбинированной полусферической формы и соосной конической частью в передней ее части, которую располагают внутри ее полусферической части, где располагают стыковочное устройство с возможностью разворота в любом направлении относительно оси основной подводной лодки, к которому зафиксирована внутренняя коническая часть дополнительной подводной лодки, которая зафиксирована основанием конической части внутри нее для совместного разворота в любом направлении.
| RU 93036195 A, 27.10.1995; | |||
| УКРЫТИЕ МЕСТ ВЗРЫВА ИЗ АВТОМОБИЛЬНЫХ ШИН | 2009 |
|
RU2405125C1 |
| Составное судно | 1987 |
|
SU1507641A1 |
| СПОСОБ "ПРОМЕТЕЙ" РАБОТЫ ПОДВОДНОЙ ЛОДКИ | 2000 |
|
RU2185992C1 |
| CN 103085955 A, 08.05.2013 | |||

