Изобретение пространственный механизм относится к машиностроению, в частности к робототехнике, а именно к пространственным манипуляционным механизмам роботов с кинематической развязкой вертикального движения и плоских движений.
Известно устройство - пространственный механизм с четырьмя степенями свободы (Глазунов В.А., Ширинкин М.А., Палочкин С.В., 2009, "Пространственный механизм с четырьмя степенями свободы", Патент No. RU 88601 U1, 05.06.2009), который включает основание, конечное звено, вертикально установленный на основании двигатель поступательного перемещения, вертикально расположенную штангу, установленную с возможностью перемещения ее двигателем поступательного перемещения, связанное с ней промежуточное звено, три сопряженных с промежуточным звеном двигателя, каждый из которых посредством промежуточной вращательной пары с вертикальной осью и конечной вращательной пары связан с конечным звеном.
Недостатком данного устройства является наличие вращательных двигателей, что требует передаточных устройств между двигателями и промежуточными звеньями. Это усложняет конструкцию и снижает надежность устройства. Кроме того, не имеется возможность наклонять конечное звено.
За прототип взято устройство - пространственный механизм с шестью степенями свободы (Глазунов В.А., Палочкин С.В., Хейло С.В., Ларюшкин П.А., Ширинкин М.А., Артеменко Ю.Н., Каганов Ю.Т., 2011, "Пространственный механизм с шестью степенями свободы", Патент No. RU 113193 U1, 19.05.2011), который включает основание, конечное звено, вертикально установленный на основании двигатель поступательного перемещения, вертикально расположенную штангу, установленную с возможностью перемещения ее двигателем поступательного перемещения, связанное с ней промежуточное звено, три сопряженных с промежуточным звеном двигателя, каждый из которых посредством промежуточной вращательной пары с вертикальной осью и конечной сферической пары связан с конечным звеном.
Недостатком данного устройства является наличие вращательных двигателей, что требует передаточных устройств между двигателями и промежуточными звеньями. Это усложняет конструкцию и снижает надежность устройства.
Технический результат - повышение технической и эксплуатационной эффективности устройств манипулирования в пространстве на базе замены вращательных двигателей поступательными.
Технический результат достигается тем, что в пространственном механизме, который включает основание, конечное звено, вертикально установленный на основании двигатель поступательного перемещения, вертикально расположенную штангу, установленную с возможностью перемещения ее двигателем поступательного перемещения, связанное с ней промежуточное звено, три сопряженных с промежуточным звеном двигателя, каждый из которых посредством промежуточной вращательной пары с вертикальной осью и конечной сферической пары связан с конечным звеном, новым является то, что три сопряженные с промежуточным звеном двигателя, выполнены в виде горизонтально расположенных на промежуточном звене двигателей поступательного перемещения, вертикально расположенная штанга связана с промежуточным звеном посредством шарнира с горизонтальной осью, кроме того на основании установлен дополнительный вертикально расположенный двигатель поступательного перемещения, сопряженный с дополнительным вертикально расположенным звеном, связанным с промежуточным звеном двумя дополнительными шарнирами с горизонтальными осями, параллельными оси шарнира, связывающего вертикально расположенную штангу с промежуточным звеном.
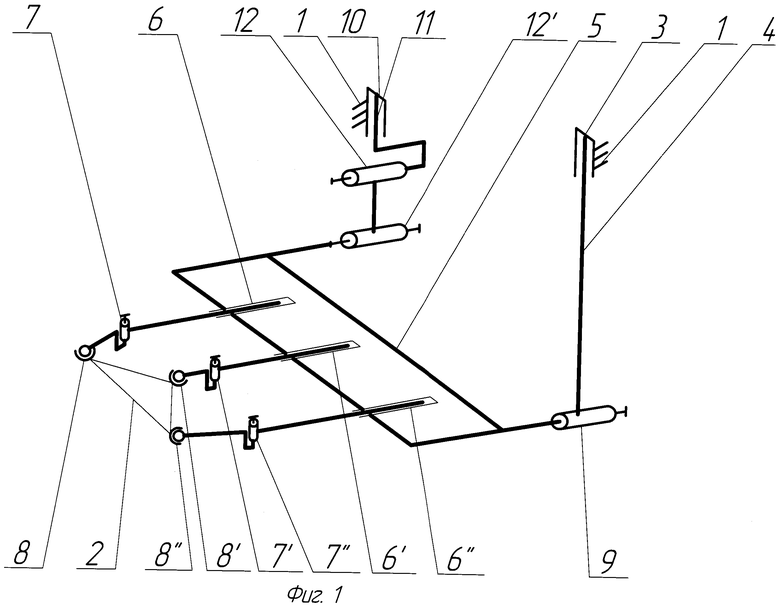
На фиг.1 представлен пространственный механизм.
Устройство - пространственный механизм - содержит: основание (1), конечное звено (2), вертикально установленный на основании двигатель поступательного перемещения (3), вертикально расположенную штангу (4), установленную с возможностью перемещения ее двигателем поступательного перемещения (3), связанное с ней промежуточное звено (5), три сопряженных с промежуточным звеном (5) двигателя (6), (6'), (6"), каждый из которых посредством промежуточной вращательной пары с вертикальной осью (7) (7'), (7") и конечной сферической пары (8), (8'), (8") связан с конечным звеном (2). При этом три сопряженные с промежуточным звеном (5) двигателя (6), (6'), (6") выполнены в виде горизонтально расположенных на промежуточном звене (5) двигателей поступательного перемещения (6), (6'), (6"), вертикально расположенная штанга (4) связана с промежуточным звеном (5) посредством шарнира (9) с горизонтальной осью, кроме того на основании (1) установлен дополнительный вертикально расположенный двигатель поступательного перемещения (10), сопряженный с дополнительным вертикально расположенным звеном (11), связанным с промежуточным звеном (5) двумя дополнительными шарнирами (12), (12') с горизонтальными осями, параллельными оси шарнира (9), связывающего вертикально расположенную штангу (4) с промежуточным звеном (5).
Устройство - пространственный механизм - работает следующим образом. Относительно основания (1) конечное звено (2) перемещается по вертикали вертикально установленным на основании двигателем поступательного перемещения (3), который передает движение на вертикальную расположенную штангу (4), установленную с возможностью перемещения ее двигателем поступательного перемещения (3), затем через шарнир (9) с горизонтальной осью движение передается на связанное с вертикально расположенной штангой (4) промежуточное звено (5). Для движений в плоскости промежуточного звена (5) используются три сопряженных с промежуточным звеном (5) двигателя поступательного перемещения (6), (6'), (6"), каждый из которых посредством промежуточной вращательной пары с вертикальной осью (7) (7'), (7") и конечной сферической пары (8), (8'), (8") передает движение на конечное звено (2). За счет того, что двигатели, сопряженные с промежуточным звеном (5), выполнены в виде горизонтально расположенных на промежуточном звене (5) двигателей поступательного перемещения (6), (6'), (6"), имеется возможность более протяженных линейных движений конечного звена (2) в плоскости промежуточного звена (5). Кроме того, вертикально расположенный двигатель поступательного перемещения (10), сопряженный с дополнительным вертикально расположенным звеном (11), связанным с промежуточным звеном (5) двумя дополнительными шарнирами (12), (12') с горизонтальными осями, параллельными оси шарнира (9), связывающего вертикально расположенную штангу (4) с промежуточным звеном (5), обеспечивает качательные движения промежуточного звена (5) и, следовательно, конечного звена (2). Тем самым обеспечивается увеличение функциональных возможностей механизма.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С ПЯТЬЮ СТЕПЕНЯМИ СВОБОДЫ | 2011 |
|
RU2466014C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С ЧЕТЫРЬМЯ СТЕПЕНЯМИ СВОБОДЫ И КИНЕМАТИЧЕСКОЙ РАЗВЯЗКОЙ | 2010 |
|
RU2455147C2 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С ЧЕТЫРЬМЯ СТЕПЕНЯМИ СВОБОДЫ И КИНЕМАТИЧЕСКОЙ РАЗВЯЗКОЙ | 2010 |
|
RU2455146C2 |
| РОБОТОТЕХНИЧЕСКАЯ УСТАНОВКА ДЛЯ ОБРАБОТКИ ДЕТАЛЕЙ | 2009 |
|
RU2415744C2 |
| Механизм стенда для испытания колесно - ступичного узла автомобиля | 1990 |
|
SU1749755A1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С ШЕСТЬЮ СТЕПЕНЯМИ СВОБОДЫ | 2013 |
|
RU2536735C1 |
| СКЛАДНОЙ МЕХАНИЗМ С ШЕСТЬЮ СТЕПЕНЯМИ СВОБОДЫ | 2019 |
|
RU2720270C1 |
| Пространственный механизм | 1991 |
|
SU1779576A1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С ЧЕТЫРЬМЯ СТЕПЕНЯМИ СВОБОДЫ | 2013 |
|
RU2534706C1 |
| УСТРОЙСТВО ДЛЯ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ОБЪЕКТОВ | 2017 |
|
RU2674370C1 |
Изобретение относится к робототехнике, а именно к пространственным манипуляционным механизмам роботов с кинематической развязкой вертикального движения и плоских движений. Механизм содержит основание, конечное звено, вертикально установленный на основании двигатель поступательного перемещения, вертикально расположенную штангу, установленную с возможностью перемещения ее двигателем поступательного перемещения, связанное с ней промежуточное звено, три сопряженных с промежуточным звеном двигателя, каждый из которых посредством промежуточной вращательной пары с вертикальной осью и конечной сферической пары связан с конечным звеном. Три сопряженные с промежуточным звеном двигателя выполнены в виде горизонтально расположенных на промежуточном звене двигателей поступательного перемещения. Вертикально расположенная штанга связана с промежуточным звеном посредством шарнира с горизонтальной осью. Механизм снабжен дополнительным вертикально установленным на основании двигателем поступательного перемещения и дополнительным вертикально расположенным звеном, связанным с промежуточным звеном двумя дополнительными шарнирами с горизонтальными осями, параллельными оси шарнира, связывающего вертикально расположенную штангу с промежуточным звеном. Технический результат - повышение технической и эксплуатационной эффективности устройств манипулирования в пространстве на базе замены вращательных двигателей поступательными. 1 ил.
Пространственный механизм, включающий основание, конечное звено, вертикально установленный на основании двигатель поступательного перемещения, вертикально расположенную штангу, установленную с возможностью перемещения ее двигателем поступательного перемещения, связанное с ней промежуточное звено, три сопряженных с промежуточным звеном двигателя, каждый из которых посредством промежуточной вращательной пары с вертикальной осью и конечной сферической пары связан с конечным звеном, отличающийся тем, что сопряженные с промежуточным звеном двигатели выполнены в виде горизонтально расположенных на промежуточном звене двигателей поступательного перемещения, а вертикально расположенная штанга связана с промежуточным звеном посредством шарнира с горизонтальной осью, при этом механизм снабжен дополнительным вертикально установленным на основании двигателем поступательного перемещения и дополнительным вертикально расположенным звеном, связанным с промежуточным звеном двумя дополнительными шарнирами с горизонтальными осями, параллельными оси шарнира, связывающего вертикально расположенную штангу с промежуточным звеном.
| Запоминающее электролюминесцентное устройство | 1958 |
|
SU122939A1 |
| Способ создания ускорений | 1957 |
|
SU113193A1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С ПЯТЬЮ СТЕПЕНЯМИ СВОБОДЫ | 2011 |
|
RU2466014C1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| PAMINSA: A new family of partially decoupled parallel manipulators, Sebastien Briot, Vigen Arakelian, Sylvain Guegan, Mechanism and Machine Theory, 44 (2009), pp.425-444 | |||

