Изобретение относится к механическим системам параллельной структуры, применяемым в технике для получения заданного движения выходного звена.
Известен поворотный гексапод с круговой направляющей [Coulombe J., Bonev I.A. A new rotary hexapod for micropositioning. Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Karlsruhe, Germany, 2013, pp. 869-872, Figure 2], включающий неподвижное звено (стойку), выполненное в виде замкнутой круговой направляющей, и выходное звено, выполненное в виде платформы, соединенные между собой шестью кинематическими цепями, каждая из которых включает каретку и штангу. Каретка образует с круговой направляющей вращательный шарнир, а штанга входит в сферические шарниры с кареткой и платформой. Движение выходного звена контролируется шестью приводами, расположенными за периметром круговой направляющей и установленными на каретках, выполняющих функцию ведущих звеньев. При этом на круговой направляющей нарезаны зубья, а на валах приводов кареток жестко установлены аналоги зубчатых колес, которые выполнены в виде цилиндров, установленных между двумя круглыми пластинами, и сопряжены с круговой направляющей. Недостатком такого устройства является невозможность его трансформирования из трехмерной конструкции в двумерную, когда платформа располагается сразу над круговой направляющей, а штанги занимают горизонтальные положения.
Наиболее близким к предлагаемому устройству является механизм параллельной структуры с круговой направляющей [Luces М., Boyraz Р., Mahmoodi M., Keramati F., Mills J.K., Benhabib B. An emulator-based prediction of dynamic stiffness for redundant parallel kinematic mechanisms. Journal of Mechanisms and Robotics, 2016, Vol. 8, 021021-1, Fig. 2], включающий неподвижное звено (стойку), выполненное в виде замкнутой круговой направляющей, и выходное звено, выполненное в виде платформы, соединенные между собой тремя кинематическими цепями, каждая из которых включает каретку, промежуточное звено и штангу. Каретка образует с круговой направляющей вращательный шарнир, а с промежуточным звеном - поступательный шарнир. Штанга входит с промежуточным звеном во вращательный шарнир, а с платформой в сферический шарнир. Движение выходного звена контролируется шестью приводами, сопряженными в каждой кинематической цепи с кареткой и с промежуточным звеном. В данном механизме возможно обеспечение трансформации формы из трехмерной конструкции в двумерную, когда платформа располагается сразу над круговой направляющей, а штанги занимают горизонтальные положения.
Данный механизм принимается за прототип предлагаемого устройства. Недостаток прототипа заключается в наличии поступательных шарниров, которые допускают смещение промежуточных звеньев со штангами за периметр круговой направляющей, тем самым увеличивая габариты механизма.
Техническая проблема, решаемая предлагаемым изобретением, заключается в усовершенствовании конструкции прототипа путем устранения в нем поступательных шарниров, наличие которых требует установки на каретках направляющих, выступающих внутрь и за периметр круговой направляющей, что делает механизм громоздким и не способствует обеспечению компактности и элегантности его конструкции.
Данная проблема решается тем, что в известном складном механизме, включающем стойку в виде замкнутой круговой направляющей и выходное звено в виде платформы, соединенные между собой тремя кинематическими цепями, каждая из которых содержит, каретку с приводом, установленную на круговой направляющей, промежуточное звено с приводом и штангу, входящую с промежуточным звеном во вращательный шарнир, а с платформой в сферический шарнир, согласно изобретению в каждой кинематической цепи каретка и промежуточное звено образуют вращательный шарнир, ось которого проходит через центр круговой направляющей, а ось вала привода промежуточного звена перпендикулярна оси вала привода каретки, при этом штанги выполнены криволинейными.
Технический результат, получаемый при использовании предлагаемого изобретения, заключается в создании компактной конструкции механизма, в которой промежуточные звенья и штанги не выходят за периметр круговой направляющей, что способствует расширению областей применения предлагаемого изобретения.
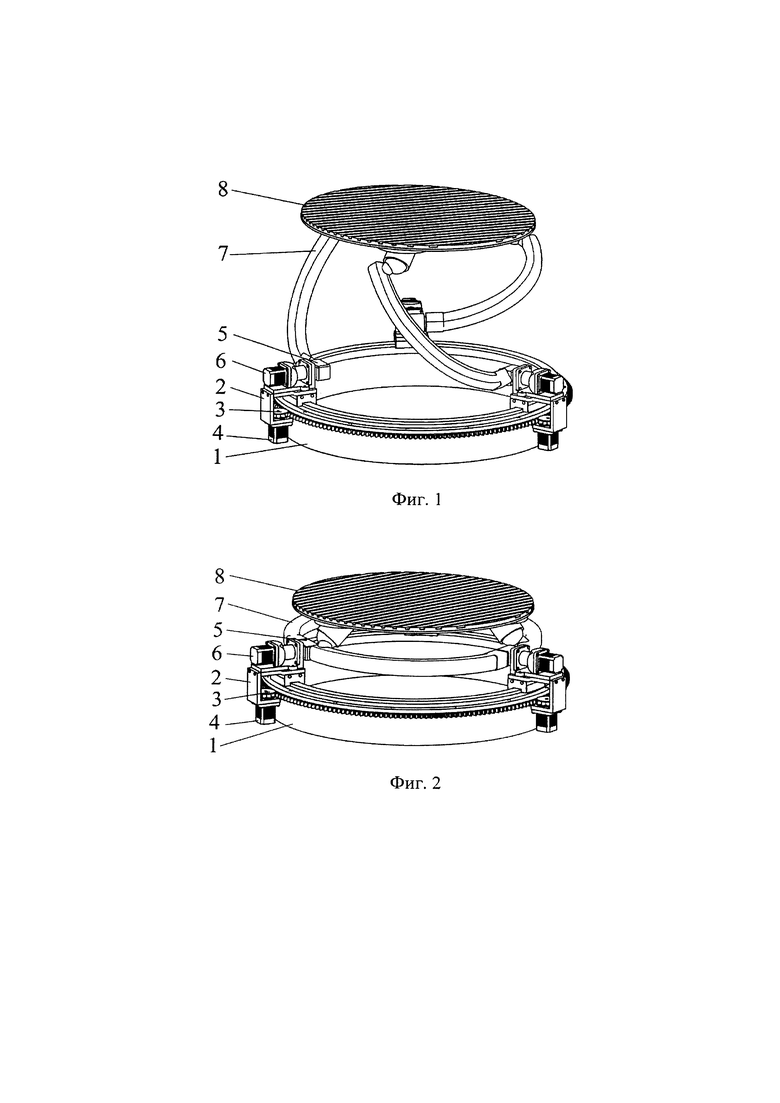
Предлагаемое изобретение поясняется чертежами, где на фиг. 1 показан предлагаемый складной механизм в разложенном состоянии, на фиг. 2 - в сложенном состоянии.
Складной механизм состоит из стойки 1, выполненной в виде замкнутой круговой направляющей с нарезанными на ней зубьями, кареток 2, установленных на круговой направляющей. Внутри кареток 2 установлены зубчатые колеса 3, жестко сопряженные с валами приводов 4 кареток. Промежуточные звенья 5 жестко сопряжены с валами приводов 6, оси которых перпендикулярны осям валов приводов 4 кареток. Каретки 2 и промежуточные звенья 5 соединены вращательными шарнирами. Штанги 7, выполненные криволинейными, входят с промежуточными звеньями 5 во вращательные шарниры, а с выходным звеном 8, выполненным в виде платформы, в сферические шарниры. Привода 4 жестко установлены в вертикальном положении снизу кареток 2, привода 6 жестко установлены в горизонтальном положении сверху кареток 2.
Принцип работы складного механизма заключается в следующем. В каждой кинематической цепи движение может быть задано независимо каретке 2 через зубчатое колесо 3 от привода 4 или промежуточному звену 5 от привода 6. При задании движения зубчатым колесам 3 каретки 2 смещаются вдоль круговой направляющей. При задании движения промежуточным звеньям 5 штанги 7 смещаются из горизонтального положения в вертикальное и обратно. Одновременно может быть приведено в движение до шести приводов.
Предлагаемое изобретение может быть использовано в технологических процессах по обработке различных элементов деталей машин в качестве опорно-поворотного или ориентирующего устройства, в медицинских приложениях для задания пространственной ориентации различных объектов, а также в авто или авиа-тренажерах в качестве подвижной платформы.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОРИЕНТИРУЮЩАЯ ПЛАТФОРМА С ШЕСТЬЮ СТЕПЕНЯМИ СВОБОДЫ | 2019 |
|
RU2714147C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ ОТНОСИТЕЛЬНОГО МАНИПУЛИРОВАНИЯ С ДВУХ- И ЧЕТЫРЕХПОДВИЖНЫМ МОДУЛЯМИ ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ | 2023 |
|
RU2804502C1 |
| ШЕСТИПОДВИЖНОЕ ПРОСТРАНСТВЕННОЕ УСТРОЙСТВО ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ ОТНОСИТЕЛЬНОГО МАНИПУЛИРОВАНИЯ | 2023 |
|
RU2804666C1 |
| УСТРОЙСТВО ДЛЯ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ОБЪЕКТОВ | 2017 |
|
RU2674370C1 |
| ТРЕХПОДВИЖНЫЙ РЕКОНФИГУРИРУЕМЫЙ СФЕРИЧЕСКИЙ МЕХАНИЗМ С КРУГОВОЙ НАПРАВЛЯЮЩЕЙ | 2023 |
|
RU2800734C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ ДЛЯ МИКРОПОЗИЦИОНИРОВАНИЯ | 2018 |
|
RU2674357C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С КРУГОВЫМ РЫЧАЖНЫМ ОСНОВАНИЕМ | 2017 |
|
RU2667236C1 |
| ДВУХПОДВИЖНЫЙ РЕКОНФИГУРИРУЕМЫЙ СФЕРИЧЕСКИЙ МЕХАНИЗМ С КРУГОВОЙ НАПРАВЛЯЮЩЕЙ | 2023 |
|
RU2799609C1 |
| ПЯТИПОДВИЖНЫЙ ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С ПРИВОДНОЙ ИЗБЫТОЧНОСТЬЮ | 2023 |
|
RU2817276C1 |
| СКЛАДНОЙ МЕХАНИЗМ С ИНТЕГРИРОВАННЫМИ КИНЕМАТИЧЕСКИМИ ЦЕПЯМИ | 2019 |
|
RU2729835C1 |
Изобретение относится к механическим системам параллельной структуры, применяемым в технике для получения заданного движения выходного звена. Складной механизм содержит стойку в виде замкнутой круговой направляющей и выходное звено в виде платформы, соединенные между собой тремя кинематическими цепями, каждая из которых содержит каретку с приводом, установленную на круговой направляющей, промежуточное звено с приводом и штангу, соединенную с промежуточным звеном посредством вращательного шарнира, а с платформой – посредством сферического шарнира. В каждой кинематической цепи каретка и промежуточное звено образуют вращательный шарнир, ось которого проходит через центр круговой направляющей, а ось вала привода промежуточного звена перпендикулярна оси вала привода каретки, при этом штанги выполнены криволинейными. Технический результат, получаемый при использовании изобретения, заключается в создании компактной конструкции механизма, в которой промежуточные звенья и штанги не выходят за периметр круговой направляющей, что способствует расширению областей применения предлагаемого изобретения. 2 ил.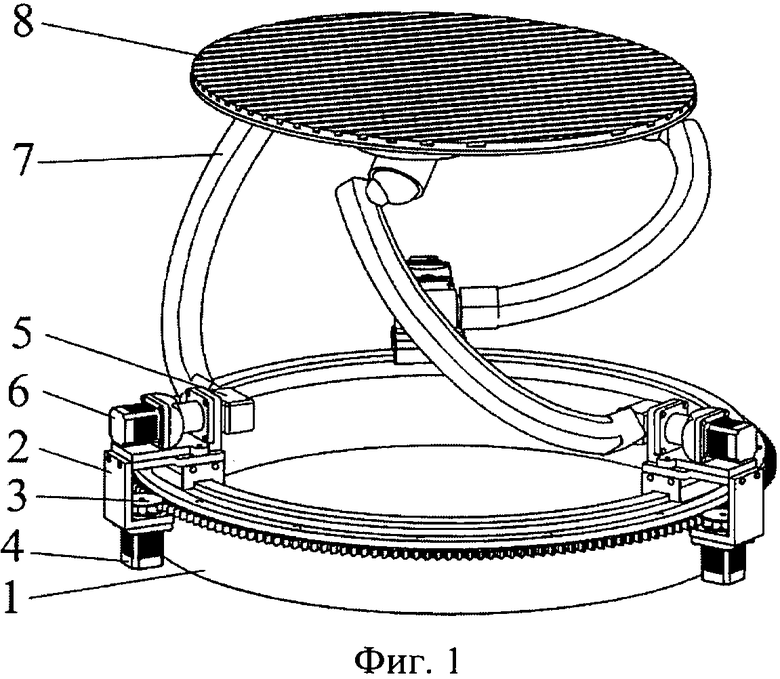
Складной механизм с шестью степенями свободы, содержащий стойку в виде замкнутой круговой направляющей и выходное звено в виде платформы, соединенные между собой тремя кинематическими цепями, каждая из которых содержит каретку с приводом, установленную на круговой направляющей, промежуточное звено с приводом и штангу, соединенную с промежуточным звеном посредством вращательного шарнира, а с платформой – посредством сферического шарнира, отличающийся тем, что в каждой кинематической цепи каретка и промежуточное звено образуют вращательный шарнир, ось которого проходит через центр круговой направляющей, а ось вала привода промежуточного звена перпендикулярна оси вала привода каретки, при этом штанги выполнены криволинейными.
| Luces Mario et al | |||
| An Emulator-Based Prediction of Dynamic Stiffness for Redundant Parallel Kinematic Mechanisms | |||
| Journal of Mechanisms and Robotics | |||
| Токарный резец | 1924 |
|
SU2016A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| УСТРОЙСТВО ДЛЯ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ОБЪЕКТОВ | 2017 |
|
RU2674370C1 |
| Выпрямительное устройство | 1929 |
|
SU20222A1 |
| US 20020007690 A1, 24.01.2002 | |||
| Hay Azulay et al | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Robotics | |||

