Изобретение относится к машиностроению, в частности к робототехнике, а именно к пространственным манипуляционным механизмам роботов с пятью степенями свободы.
Целью изобретения является повышение технической и эксплуатационной эффективности устройств манипулирования в пространстве по пяти координатам.
Известно устройство (Arakelyan V., Maurine P., Briot S., Pion E., 2005, "Parallel robot comprising means for setting in motion a mobile element split in two separate subassemblies," Patent No. WO 2006/021629 A1, 02.03.2006) - пространственный механизм, включающий основание, конечное звено, связанное с установленными на основании двигателями вращательного перемещения посредством вращательных кинематических пар и промежуточных звеньев.
Недостатком данного устройства является то, что в нем передача движения со стороны вращательных двигателей осуществляется через поступательные кинематические пары, выполненные в виде пантографного механизма. Это снижает надежность устройства.
За прототип взято устройство - пространственный механизм (Патент РФ на полезную модель. №88601. Пространственный механизм с четырьмя степенями свободы. // Глазунов В.А., Ширинкин М.А., Палочкин С.В. Заявка № 2009121390/22, 05.06.2009. Оп. 20.11.2009. Бюл. №32).
Недостатком данного устройства является то, что оно обладает лишь четырьмя степенями свободы, что является недостаточным для выполнения сложных манипуляционных операций.
Технический результат - увеличение надежности и эффективности устройств манипулирования в пространстве по пяти координатам.
Технический результат достигается тем, что пространственный механизм с пятью степенями свободы включает основание, конечное звено, вертикально установленный на основании двигатель поступательного перемещения, три соединительные кинематические цепи, содержащие каждая вертикально расположенную входную вращательную кинематическую пару, сопряженную с вертикально установленным прямолинейным звеном, сопряженным с первым промежуточным звеном, связанным посредством вращательной кинематической пары со вторым промежуточным звеном, сопряженным посредством сферической кинематической пары с конечным звеном механизма, причем вертикально установленное прямолинейное звено сопряжено с возможностью вертикального перемещения с выходным звеном цилиндрической передачи, связанной с вертикально установленным на основании двигателем вращательного перемещения, а вертикально установленный на основании двигатель поступательного перемещения сопряжен с вертикально расположенными входными вращательными кинематическими парами двух соединительных кинематических цепей, при этом пространственный механизм снабжен дополнительным вертикально установленным на основании двигателем поступательного перемещения, сопряженным с вертикально расположенной входной вращательной кинематической парой третьей соединительной кинематической цепи.
Устройство - пространственный механизм с пятью степенями свободы представлен на фигуре 1.
Устройство - пространственный механизм с пятью степенями свободы включает основание 1, конечное звено 2, вертикально установленный на основании двигатель поступательного перемещения 3, три соединительные кинематические цепи, содержащие каждая вертикально расположенную входную вращательную кинематическую пару 4 (4',4''), сопряженную с вертикально установленным прямолинейным звеном 5 (5', 5''), сопряженным с первым промежуточным звеном 6 (6', 6''), связанным посредством вращательной кинематической пары 7 (7', 7'') со вторым промежуточным звеном 8 (8', 8''), сопряженным посредством сферической кинематической пары 9 (9', 9'') с конечным звеном механизма 2, причем вертикально установленное прямолинейное звено 5 (5', 5'') сопряжено с возможностью вертикального перемещения с выходным звеном цилиндрической передачи 10 (10', 10''), связанной с вертикально установленным на основании двигателем вращательного перемещения 11 (11', 11''), а вертикально установленный на основании двигатель поступательного перемещения 3 сопряжен с вертикально расположенными входными вращательными кинематическими парами двух соединительных кинематических цепей, при этом пространственный механизм снабжен дополнительным вертикально установленным на основании двигателем поступательного перемещения 12, сопряженным с вертикально расположенной входной вращательной кинематической парой третьей соединительной кинематической цепи.
Устройство - пространственный механизм с пятью степенями свободы работает следующим образом.
Относительно основания 1 конечное звено 2 перемещается по пяти координатам посредством трех соединительных кинематических цепей. Установленные на основании двигатели поступательного перемещения 3, 12 сообщают вертикальное движение вертикально установленным прямолинейным звеньям 5, 5', 5'' и сопряженным с ними входным вращательным кинематическим парам 4, 4', 4'', а вертикально установленные на основании двигатели вращательного перемещения 11, 11', 11'' сообщают этим же звеньям вращательное движение. В результате передачи этих двух типов движения через первое промежуточное звено 6 (6', 6''), связанное посредством вращательной кинематической пары 7 (7', 7'') со вторым промежуточным звеном 8 (8', 8''), сопряженным посредством сферической кинематической пары 9 (9', 9'') с конечным звеном механизма 2 в каждой соединительной цепи, конечное звено механизма 2 получает возможность перемещения по пяти координатам в пространстве.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С ЧЕТЫРЬМЯ СТЕПЕНЯМИ СВОБОДЫ И КИНЕМАТИЧЕСКОЙ РАЗВЯЗКОЙ | 2010 |
|
RU2455147C2 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С ЧЕТЫРЬМЯ СТЕПЕНЯМИ СВОБОДЫ И КИНЕМАТИЧЕСКОЙ РАЗВЯЗКОЙ | 2010 |
|
RU2455146C2 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ | 2013 |
|
RU2530111C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С ШЕСТЬЮ СТЕПЕНЯМИ СВОБОДЫ | 2013 |
|
RU2536735C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ | 2009 |
|
RU2412798C2 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С ЧЕТЫРЬМЯ СТЕПЕНЯМИ СВОБОДЫ | 2013 |
|
RU2534706C1 |
| РОБОТОТЕХНИЧЕСКАЯ УСТАНОВКА ДЛЯ ОБРАБОТКИ ДЕТАЛЕЙ | 2009 |
|
RU2415744C2 |
| ПРОСТРАНСТВЕННЫЙ СФЕРИЧЕСКИЙ МЕХАНИЗМ С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ | 2011 |
|
RU2465124C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С ШЕСТЬЮ СТЕПЕНЯМИ СВОБОДЫ | 2013 |
|
RU2525466C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ | 2008 |
|
RU2403140C2 |
Изобретение относится к машиностроению, в частности к робототехнике. Пространственный механизм включает основание, конечное звено, установленный на основании двигатель поступательного перемещения, три соединительные кинематические цепи. Каждая цепь содержит входную вращательную кинематическую пару, сопряженную с вертикально установленным прямолинейным звеном, связанным посредством промежуточных звеньев и сферической кинематической пары с конечным звеном механизма. Причем вертикально установленное прямолинейное звено в каждой кинематической цепи сопряжено с выходным звеном цилиндрической передачи, связанной с вертикально установленным на основании двигателем вращательного перемещения. Вертикально установленный на основании двигатель поступательного перемещения сопряжен с вертикально расположенными входными вращательными кинематическими парами двух соединительных кинематических цепей. Механизм снабжен дополнительным вертикально установленным на основании двигателем поступательного перемещения, сопряженным с вертикально расположенной входной вращательной кинематической парой третьей соединительной кинематической цепи. Изобретение направлено на увеличение надежности и эффективности устройств манипулирования в пространстве по пяти координатам. 1 ил.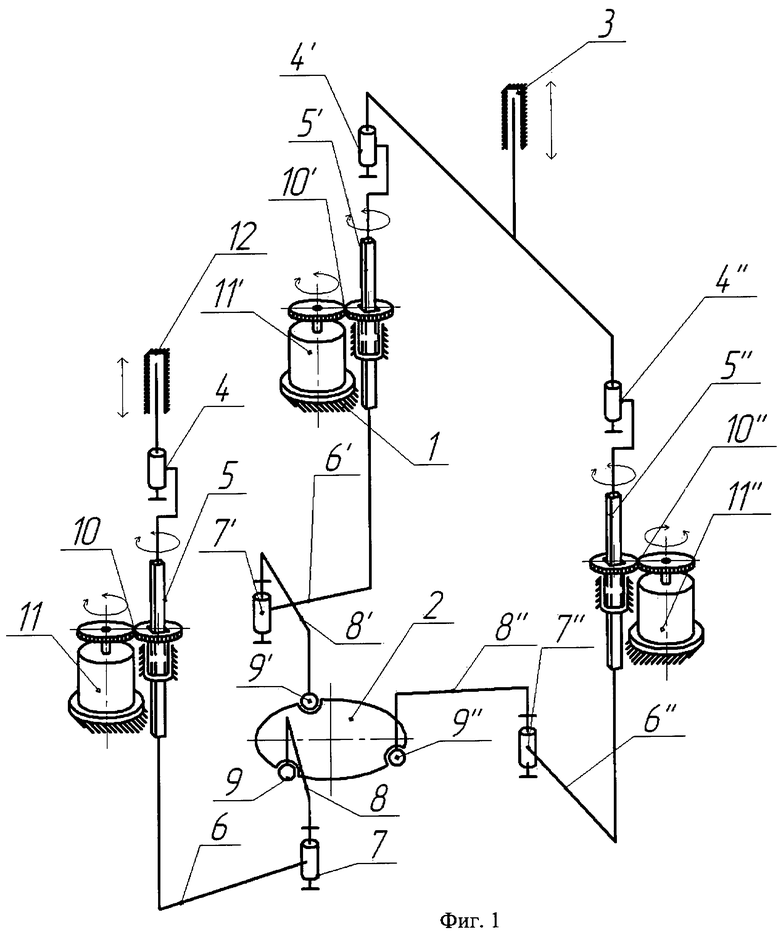
Пространственный механизм с пятью степенями свободы, включающий основание, конечное звено, вертикально установленный на основании двигатель поступательного перемещения, три соединительные кинематические цепи, содержащие каждая вертикально расположенную входную вращательную кинематическую пару, сопряженную с вертикально установленным прямолинейным звеном, сопряженным с первым промежуточным звеном, связанным посредством вращательной кинематической пары со вторым промежуточным звеном, сопряженным посредством сферической кинематической пары с конечным звеном механизма, причем вертикально установленное прямолинейное звено в каждой кинематической цепи сопряжено с возможностью вертикального перемещения с выходным звеном цилиндрической передачи, связанной с вертикально установленным на основании двигателем вращательного перемещения, а вертикально установленный на основании двигатель поступательного перемещения сопряжен с вертикально расположенными входными вращательными кинематическими парами двух соединительных кинематических цепей, отличающийся тем, что он снабжен дополнительным вертикально установленным на основании двигателем поступательного перемещения, сопряженным с вертикально расположенной входной вращательной кинематической парой третьей соединительной кинематической цепи.
| WO 2006021629 A1, 02.03.2006 | |||
| Конные лесовозные сани | 1948 |
|
SU88601A1 |
| US 6729202 В2, 04.05.2004 | |||
| US 4976582 A, 11.12.1990. | |||

