Изобретение относится к области комплексного технического контроля (КТК) и применяется в составе подразделений радио-, радиотехнического контроля видов Вооруженных Сил и родов войск для организации защиты объектов от утечки информации по техническим каналам.
Известен мобильный комплекс технического контроля информационной безопасности, содержащий автоматизированные рабочие места, которые состоят из приемных и пеленгаторных антенн, подключенных к коммутатору, который в свою очередь соединен с радиоприемным модулем, последовательно соединенным с устройством цифровой обработки сигналов, выход которого подключен к персональной вычислительной машине, параллельно соединенной с навигационным устройством и локальной вычислительной сетью, параллельно соединенной со всеми персональными вычислительными машинами (Научно-технический отчет об ОКР «Модернизация и изготовление мобильного автоматизированного комплекса радио-, радиотехнического и специального контроля эффективности защиты информации и оценки электромагнитной обстановки на базе специальной аппаратуры», ФГУП «ВНИИ «Эталон», г. Москва, 2005 г.).
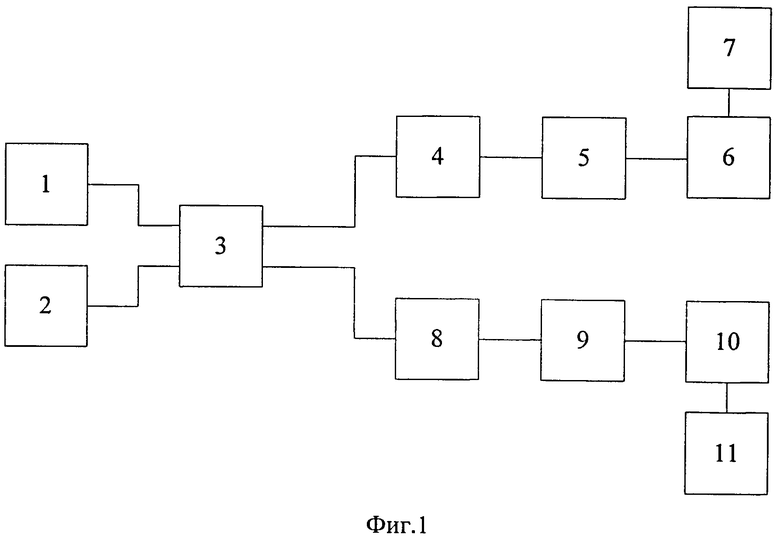
Блок-схема прототипа представлена на фиг.1, где приняты следующие обозначения:
1 - приемные антенны;
2 - пеленгаторные антенны;
3 - коммутатор (комм.);
4, 8 - радиоприемный модуль (РПМ);
5, 9 - устройство цифровой обработки сигналов (УЦОС);
6, 10 - персональная электронно-вычислительная машина (ПЭВМ);
7, 11 - навигационное устройство (НУ).
Указанный прототип не позволяет проводить работы по техническому контролю в воздушном пространстве.
Задачей предлагаемого изобретения является расширение арсенала технических средств - устройств технического контроля информационной безопасности.
Техническим результатом является расширение возможностей проведения работ по техническому контролю при применении беспилотных летательных аппаратов в составе мобильного комплекса в качестве носителей технических средств контроля.
Технический результат достигается тем, что мобильный комплекс технического контроля информационной безопасности содержит автоматизированные рабочие места, предназначенные для автоматизированного выполнения задач наземного визуального, фотографического, оптико-электронного, радиационного контроля, контроля эффективности защиты информации и состоящие из приемных и пеленгаторных антенн, подключенных к коммутатору, который в свою очередь соединен с радиоприемным модулем, последовательно соединенным с устройством цифровой обработки сигналов, выход которого подключен к персональной вычислительной машине, параллельно соединенной с навигационным устройством и локальной вычислительной сетью, параллельно соединенной со всеми персональными вычислительными машинами, при этом в устройство дополнительно введено автоматизированное рабочее место воздушного контроля, предназначенное для автоматизированного выполнения задач воздушного фотографического, телевизионного, тепловизионного (инфракрасного видового) контроля, обнаружения оптических систем и средств при решении задач комплексного технического контроля по выявлению их технических демаскирующих признаков, состоящее из летно-подъемной платформы и беспилотного летательного аппарата, соединенных радиоканалами управления и радиоканалами телеметрии с аппаратурой управления беспилотными летательными аппаратами, к которой параллельно подключены навигационное устройство и персональная вычислительная машина, автоматизированное рабочее место управления и связи, содержащее персональную вычислительную машину.
На фиг.1 представлен прототип.
На фиг.2 представлена блок-схема предлагаемого устройства.
Для решения поставленной задачи с достижением заявленного технического результата в устройстве объединяются функции и аппаратура АРМ-РРТК и АРМ-ТАО в единое АРМ-РРТК, а функции АРМ-СК выполняет автоматизированное рабочее место технического контроля (АРМ-ТК), предназначенное для автоматизированного выполнения задач наземного визуального, фотографического, оптико-электронного, радиационного контроля, контроля эффективности защиты информации, обрабатываемой на объектах ТСПИ, от утечки по техническим каналам, оперативной защиты информации от утечки по виброакустическим и радиоканалам, интеллектуального блокирования мобильных терминалов сотовой связи, контроля целостности и коррекции навигационного поля, также в состав устройства вводится автоматизированное рабочее место воздушного контроля (АРМ-ВК), предназначенное для автоматизированного выполнения задач воздушного фотографического, телевизионного, тепловизионного (инфракрасного видового) контроля, обнаружения оптических систем и средств при решении задач комплексного технического контроля по выявлению их технических демаскирующих признаков, а также пресечения работы приемников глобального позиционирования GPSn коррекции навигационного поля, и автоматизированное рабочее место управления и связи (АРМ-УС), предназначенное для сбора и обработки информации, поступающей от АРМ-РРТК, АРМ-ТК, АРМ-ВК изделия, приема заданий на выполнение задач комплексного технического контроля и передачи результатов их выполнения.
В состав аппаратуры АРМ-РРТК вводятся усовершенствованный приемный модуль и дополнительные антенны обнаружения и пеленгования, охватывающие больший частотный диапазон с разделением его на отдельные поддиапазоны и коэффициентом перекрытия соседних поддиапазонов 1,1-1,15.
АРМ-ТК содержит ПЭВМ и специальную аппаратуру для проведения наземного «ручного» визуального, фотографического, оптико-электронного, радиационного контроля, контроля эффективности защиты информации, обрабатываемой на объектах ТСПИ, от утечки по техническим каналам.
АРМ-ВК содержит в себе летно-подъемную платформу, беспилотный летательный аппарат самолетного типа со средствами технического контроля, аппаратуру управления беспилотными летательными аппаратами, ПЭВМ, навигационную аппаратуру.
Блок-схема содержит приемные антенны 1, пеленгаторные антенны 2, коммутатор 3, радиоприемный модуль (РПМ)4, устройство цифровой обработки сигналов (УЦОС) 5, персональные электронно-вычислительные машины (ПЭВМ) 6, 12, 13, 16; навигационное устройство (НУ) 7, 15; аппаратуру технического «ручного» контроля 8, летно-подъемную платформу (ЛПП) 9; беспилотный летательный аппарат (БПЛА) со средствами технического контроля 10, наземный пункт управления беспилотными летательными аппаратами (НПУ) 11, локальную вычислительную сеть (ЛВС) 14.
Задание на проведение контроля формируется оператором АРМ-УС. Сформированное задание поступает по локальной вычислительной сети на рабочие места операторов. Каждым оператором АРМ проводится работа по конкретизации и разбитию задания. По окончании этих операций проводятся работы по проведению контроля. По завершению контроля на каждом АРМ операторы формируют отчеты о проведенных работах, которые в дальнейшем поступают на АРМ-УС. Оператор АРМ-УС формирует конечный отчет и передает с помощью аппаратуры спутниковой связи или радиостанций на пункт управления (или иной орган управления комплексами КТК).
Предлагаемое устройство реализуется на основе модульного принципа построения и размещается на транспортной базе автомобиля повышенной проходимости.
Техническая эффективность предлагаемого устройства, в сравнении с прототипом, заключается в том, что оно обладает большим диапазоном рабочих частот, обладает возможностью контроля целостности и коррекции навигационного поля GPS/Глонасс, обладает возможностью выполнения задач воздушного фотографического, телевизионного, тепловизионного (инфракрасного видового) контроля, обнаружения оптических систем и средств. Это обеспечивается тем, что предлагаемое устройство, в отличие от прототипа, содержит в себе более широкодиапазонную антенную систему, систему подавления и коррекции навигационного поля GPS/Глонасс и два беспилотных летательных аппарата.
Изобретение позволит осуществить применение беспилотных летательных аппаратов в составе мобильного комплекса в качестве носителей технических средств контроля, а следовательно, достичь расширения возможностей проведения работ по комплексному техническому контролю.
| название | год | авторы | номер документа |
|---|---|---|---|
| Мобильная аппаратная контроля безопасности связи | 2023 |
|
RU2823040C1 |
| МОБИЛЬНЫЙ КОМПЛЕКС СВЯЗИ И УПРАВЛЕНИЯ | 2020 |
|
RU2739067C1 |
| Способ разведки ледовой обстановки с использованием дистанционно управляемых беспилотных летательных аппаратов и устройство для его осуществления | 2021 |
|
RU2778158C1 |
| СИСТЕМА РАДИОСВЯЗИ С БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2024 |
|
RU2839424C1 |
| АЭРОМОБИЛЬНЫЙ КОМПЛЕКС С БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ВЕРТОЛЕТНОГО ТИПА | 2022 |
|
RU2792314C1 |
| Беспилотный аппарат и комплекс наблюдения для него | 2016 |
|
RU2642202C1 |
| Малогабаритная радиостанция передачи команд управления беспилотным летательным аппаратом | 2021 |
|
RU2767605C1 |
| Мобильный полигонный пункт управления | 2022 |
|
RU2789919C1 |
| СИСТЕМА ДИСТАНЦИОННОГО НАБЛЮДЕНИЯ И УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2022 |
|
RU2793713C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ АВТОМАТИЗИРОВАННЫЙ РАДИОПРИЕМНЫЙ УЗЕЛ | 2020 |
|
RU2746203C1 |
Изобретение относится к технике связи, может использоваться для комплексного технического контроля. Техническим результатом является расширение функциональных возможностей при применении беспилотных летательных аппаратов в составе мобильного комплекса в качестве носителей технических средств контроля. Для этого мобильный комплекс содержит автоматизированные рабочие места для автоматизированного выполнения задач наземного визуального, фотографического, оптико-электронного, радиационного контроля, контроля эффективности защиты информации и состоящие из приемных и пеленгаторных антенн, подключенных к коммутатору, соединенному с радиоприемным модулем, последовательно соединенным с устройством цифровой обработки сигналов, персональную вычислительную машину, навигационное устройство и локальную вычислительную сеть, соединенную со всеми персональными вычислительными машинами, автоматизированное рабочее место воздушного контроля, предназначенное для автоматизированного выполнения задач воздушного фотографического, телевизионного, тепловизионного контроля, обнаружения оптических систем и средств при решении задач комплексного технического контроля по выявлению их технических демаскирующих признаков, состоящее из летно-подъемной платформы и беспилотного летательного аппарата, соединенных радиоканалами управления и радиоканалами телеметрии с аппаратурой управления беспилотными летательными аппаратами, к которой параллельно подключены навигационное устройство и персональная вычислительная машина, автоматизированное рабочее место управления и связи, содержащее персональную вычислительную машину. 2 ил.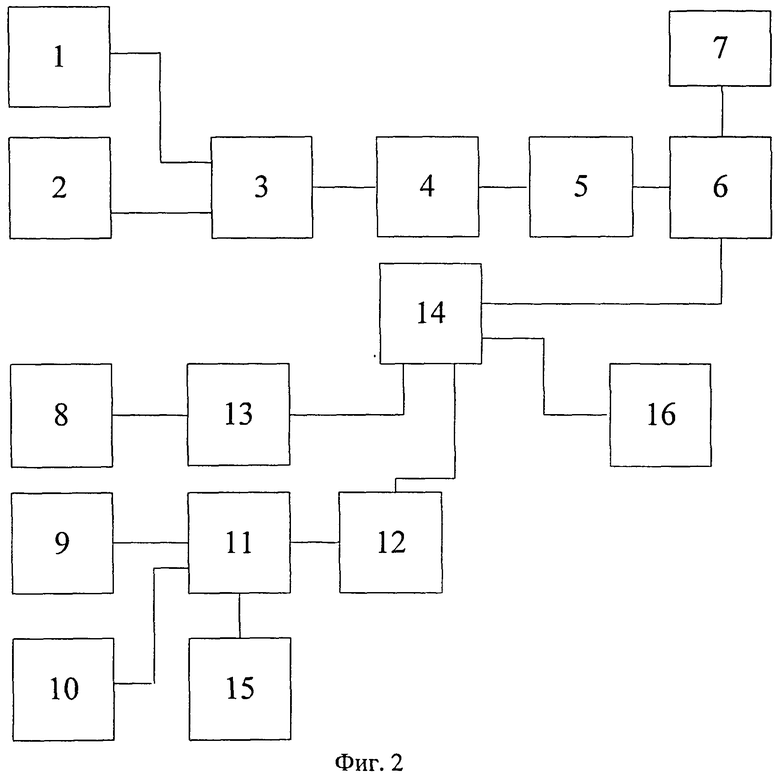
Мобильный комплекс технического контроля информационной безопасности, характеризующийся тем, что содержит автоматизированные рабочие места, предназначенные для автоматизированного выполнения задач наземного визуального, фотографического, оптико-электронного, радиационного контроля, контроля эффективности защиты информации и состоящие из приемных и пеленгаторных антенн, подключенных к коммутатору, который в свою очередь соединен с радиоприемным модулем, последовательно соединенным с устройством цифровой обработки сигналов, выход которого подключен к персональной вычислительной машине, параллельно соединенной с навигационным устройством и локальной вычислительной сетью, параллельно соединенной со всеми персональными вычислительными машинами, при этом в устройство введено автоматизированное рабочее место воздушного контроля, предназначенное для автоматизированного выполнения задач воздушного фотографического, телевизионного, тепловизионного (инфракрасного видового) контроля, обнаружения оптических систем и средств при решении задач комплексного технического контроля по выявлению их технических демаскирующих признаков, состоящее из летно-подъемной платформы и беспилотного летательного аппарата, соединенных радиоканалами управления и радиоканалами телеметрии с аппаратурой управления беспилотными летательными аппаратами, к которой параллельно подключены навигационное устройство и персональная вычислительная машина, автоматизированное рабочее место управления и связи, содержащее персональную вычислительную машину.
| RU95102423 A1, 27.11.1996 | |||
| Способ обжига измельченного материала | 1951 |
|
SU95113A1 |
| Поворотная кровать для ожоговых больных | 1957 |
|
SU111940A1 |

