УРОВЕНЬ ТЕХНИКИ
При бурении с погружным пневмоударником гибкие соединители иногда используются для облегчения направленного бурения. Гибкие соединители могут быть полезными при управляемом бурении для обеспечения достаточной гибкости компоновки низа бурильной колонны. Традиционные гибкие соединители представляют собой длинные суженные вниз секции трубы, имеющие более низкую изгибную жесткость по сравнению с другими компонентами узла низа бурильной колонны.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В целом настоящее изобретение представляет гибкое соединение, имеющее в основном улучшенные возможности для использования в более широком диапазоне бурильных работ. В одном варианте воплощения гибкий соединитель имеет регулируемую изгибную жесткость и является намного более компактным, чем традиционные гибкие соединители. Гибкий соединитель также может быть предназначен для устранения воздействия изгибающих моментов на бурильные замки и в некоторых применениях может использоваться в качестве активного узла для контроля вибрацией и ударов посредством включения соответствующих датчиков и системы гидравлического привода. Конструкция также позволяет включение других устройств, таких как устройств электрической изоляции, расположенных выше и/или ниже гибкого соединителя. В некоторых применениях, соединитель может быть также оснащен кабелем электропитания, проходящим сквозь него.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Определенные варианты воплощения изобретения будут описаны ниже со ссылкой на соответствующие чертежи, где одинаковые позиции обозначают одинаковые элементы. На чертежах показано следующее:
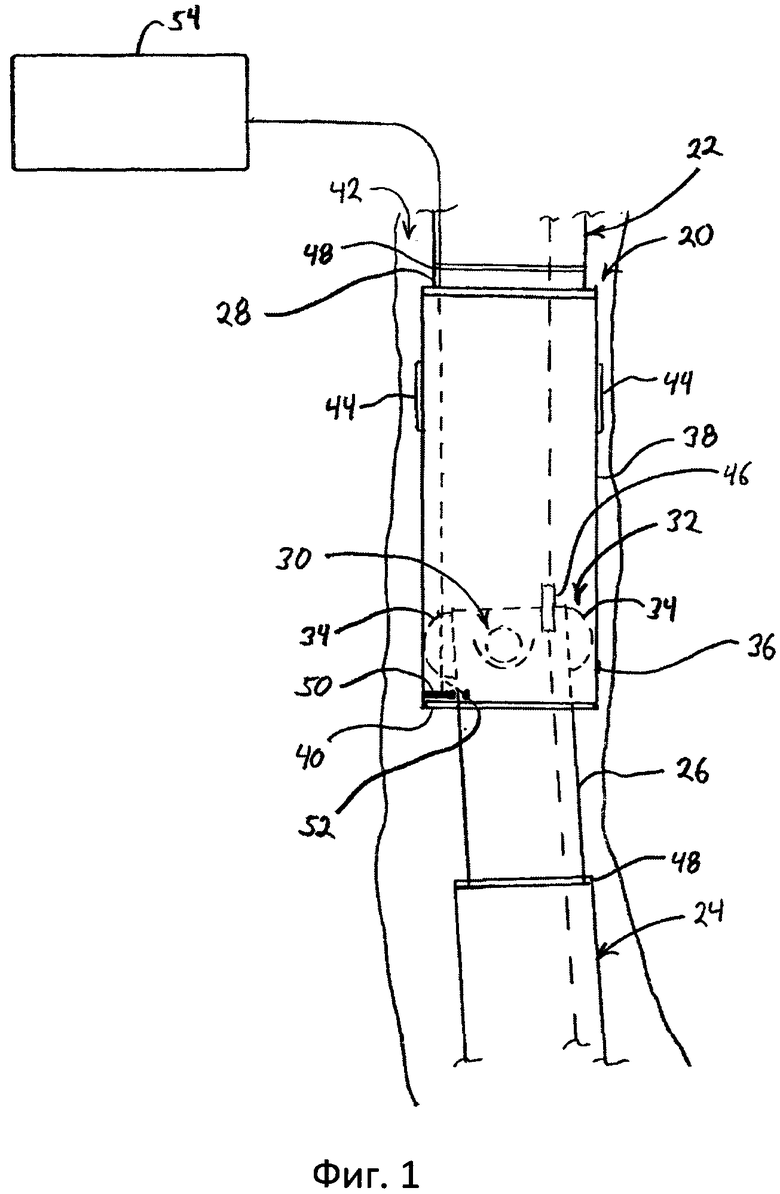
На Фиг.1 показан схематический вид гибкого соединителя, включенного в бурильную колонну для облегчения направленного бурения в соответствии с вариантом воплощения настоящего изобретения;
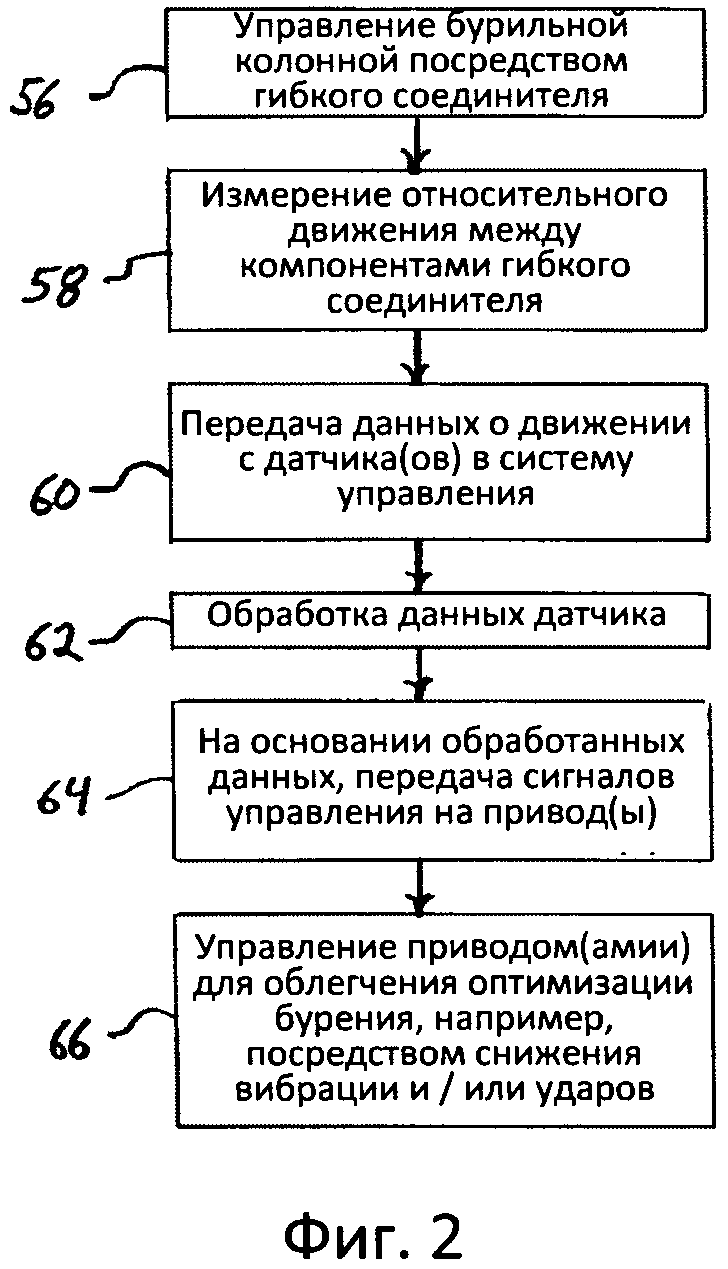
На Фиг.2 показана блок-схема, иллюстрирующая вариант воплощения осуществления способа использования гибкого соединителя для контроля вредного воздействия бурения в соответствии с вариантом воплощения настоящего изобретения; и
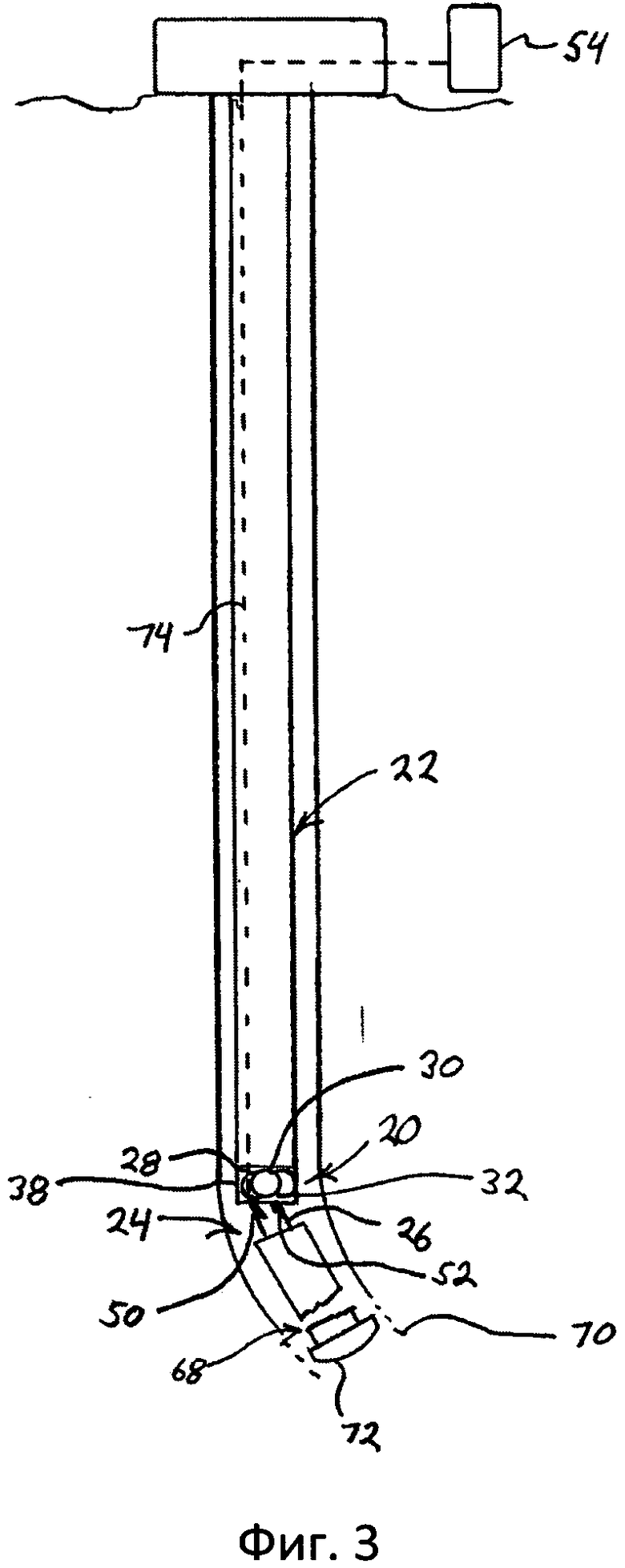
На Фиг.3 показан схематический вид буровой системы, включающей гибкий соединитель для облегчения направленного бурения в соответствии с вариантом воплощения настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ
В следующем описании многочисленные детали излагаются для обеспечения понимания настоящего изобретения. Однако специалистам в этой области должно быть понятно, что настоящее изобретение может быть использовано без этих деталей и возможны различные изменения и модификации описанных вариантов воплощения.
Настоящее изобретение в целом относится к системе и способу для облегчения направленного бурения путем включения гибкого соединителя в бурильную колонну. Гибкий соединитель может быть использован для обеспечения достаточной гибкости компоновки низа бурильной колонны для повышения возможности отклонения ствола скважины при бурении. Гибкий соединитель также может быть предназначен для обеспечения регулируемой жесткости при компактной конструкции. В некоторых вариантах осуществления гибкий соединитель может регулироваться для изменения допустимого угла отклонения. В других вариантах осуществления гибкий соединитель может включать встроенный стабилизатор. Дополнительно, гибкий соединитель может использоваться в различных применениях роторного управляемого бурения для облегчения направленного бурения.
На фиг.1 показан вариант воплощения гибкого соединителя 20, соединенного с бурильной колонной 22, которая может включать компоновку 24 низа бурильной колонны, расположенную на нижней части гибкого соединителя 20. При выполнении бурения компоновка 24 может включать в себя роторную управляемую систему для управления буровой коронкой. В иллюстрируемом примере гибкий соединитель 20 включает в себя первый компонент 26, соединенный со вторым компонентом 28 через универсальный соединитель 30, такой как универсальный шарнир Гука. Первый компонент 26 может поворачиваться относительно второго компонента 28 вокруг универсального соединителя 30 для создания угла изгиба. Конструкция гибкого соединителя 20 и универсального соединителя 30 обеспечивает сплошной соединитель, который может подвергаться высоким нагрузкам.
В иллюстрируемом варианте воплощения гибкий соединитель 20 включает в себя внутренний регулируемый пружинный узел 32, который может быть отрегулирован для обеспечения переменной изгибной жесткости первого компонента 26 относительно второго компонента 28. Например, пружинный узел 32 может включать в себя несколько рессор 34, которые могут быть избирательно отрегулированы внешним регулировочным механизмом 36 для изменения изгибной жесткости. Однако пружинный узел 32 может также использовать другие типы пружин, например торсионные пружины, спиральные пружины или пружины растяжения.
Гибкий соединитель 20 может дополнительно включать в себя втулку 38, соединенную с одним из компонентов 26, 28 и проходящую за универсальный соединитель 30 для его защиты. В качестве примера, втулка 38 может быть жестко соединена со вторым компонентом 28 в положении, которое позволяет втулке проходить за универсальный соединитель 30 и охватывать часть первого компонента 26. Это позволяет использовать втулку 38 для ограничения максимального смещения/угла изгиба гибкого соединителя. Регулировочный механизм 40, такой как разрезные кольца, может быть установлен на втулку 38 для ограничения поворота первого компонента 26 относительно второго компонента 28 и, таким образом, использоваться для выборочного регулирования максимального смещения/угла изгиба гибкого соединителя 20. Внешняя втулка 38 может быть введена в ствол 42 скважины или она может включать в себя стабилизаторы 44, такие как стабилизирующие лопатки, для облегчения центрирования гибкого соединителя 20 в стволе 42 скважины.
В иллюстрируемом варианте воплощения пружинный узел 32 расположен внутри внешней втулки 38 между внутренней поверхностью втулки и частью первого компонента 26, закрытой внешней втулкой 38. Предварительно нагруженный пружинный узел 32 может выборочно регулироваться для изменения изгибной жесткости гибкого соединителя. Например, если пружинный узел включает в себя рессоры 34, предварительно нагруженные рессоры могут регулироваться снаружи для изменения изгибной жесткости первого компонента 26 относительно второго компонента 28.
В зависимости от особенностей данного применения дополнительные устройства могут быть включены в гибкий соединитель 20, такие как электрический кабель 46, расположенный в гибком соединителе 20. В качестве примера, кабель 46 может включать соединение шины локального инструмента или многоконтактный вращающийся соединитель в верхней и нижней частях узла гибкого соединителя. Дополнительно, изоляционный элемент 48, такой как изоляционное покрытие, может быть использован для первого компонента 26 и второго компонента 28 таким образом, чтобы обеспечивать электрическую изоляцию между инструментами или другими компонентами выше и ниже гибкого соединителя 20.
Конструкция гибкого соединителя 20 имеет относительно короткий профиль, который позволяет снизить изгибающие нагрузки на вращающиеся соединители выше и ниже гибкого соединителя при высокой степени искривленности естественного ствола скважины. Это свойство облегчает опускание инструмента при высоком значении СИС указанной степени искривленности. Дополнительно, гибкий соединитель 20 может быть использован при вращательном и поступательном режимах бурения.
Другим устройством, которое может быть включено в гибкий соединитель 20, является привод или приводы 50, такой как гидравлический привод или приводы, работающий с одним или более датчиками 52. Датчики 52 могут быть предназначены и расположены для контроля ударов и вибрации, а также для передачи информации в систему 54 управления. Например, датчики 52 могут быть расположены для контроля относительного перемещения, например вибраций, между первым компонентом 26 и вторым компонентом 28. Система 54 управления также предназначена для управления гидравлическими приводами 50 таким образом, чтобы активно снижать вибрацию и удары во время, например, бурения. Один или более гидравлических приводов 50 могут быть расположены между внешней втулкой 38 и частью первого компонента 26, закрываемой втулкой 38.
Датчики 52 также могут быть выбраны и использованы для оптимизации условий бурения таким образом, который позволяет проактивно снижать удары, вибрацию и/или другие вредные воздействия. В одном варианте воплощения, например, датчики 52 передают данные в систему 54 управления, расположенную на поверхности. Данные могут передаваться на поверхность с помощью подходящей телеметрической системы, такой как системы измерения во время бурения или проводной системы в бурильной трубе. Данные, поступившие с датчиков 52, затем обрабатываются и оцениваются системой 54 управления для улучшения/оптимизации условий, т.е. снижения ударов и вибрации. Примеры условий, которые могут быть оптимизированы для активного снижения вредных воздействий, включают крутящий момент, частоту вращения при бурении, нагрузку на коронку, скорость потока и/или другие условия.
На фиг.2 представлена блок-схема для иллюстрации одного варианта воплощения способа использования управляемых приводов 50 совместно с гибким соединителем 20 для ограничения или снижения вредных воздействий буровые работы. На стадии 56 бурильная колонна 22 включает и управляется гибким соединителем 20 во время бурения. Один или более датчиков 52 используются для измерения относительного перемещения между компонентами гибкого соединителя, такими как первый компонент 26 и второй компонент 28, на стадии 58. Однако датчики 52 могут быть размещены на, между или в непосредственной близости от дополнительных или альтернативных компонентов, в зависимости от конструкции бурильной колонны и от конкретного параметра или параметров, подвергающихся контролю.
Данные о перемещении с датчиков 52 передаются в систему 54 управления на стадии 60. Система 54 управления может быть расположена в бурильной колонне 22, или на поверхности, или в другом пригодном месте. Независимо от расположения, система управления 54 программируется для обработки данных датчика на стадии 62 для облегчения контроля нежелательных эффектов, например вибрации и/или ударов, вызванных буровыми работами. На основании обработанных данных система 54 управления посылает сигналы на приводы 50 на стадии 64. Сигналы управления предназначены для управления одним или более приводами 50 таким образом, который позволяет оптимизировать бурение путем снижения или устранения нежелательного эффекта, например вибрации и/или ударов, как представлено блоком 66. В некоторых вариантах воплощения приводы 50 включают в себя гидравлические приводы; однако другие типы приводов, например электромеханические приводы, пьезоэлектрические приводы, могут использоваться для данного применения.
Гибкий соединитель 20 может быть использован в различных буровых системах для облегчения выполнения многих видов буровых работ. На фиг.3, например, буровая система включает в себя бурильную колонну 22, используемую для бурения горизонтального или многостороннего ствола скважины. В этом примере бурильная колонна включает в себя компоновку 24 низа бурильной колонны, имеющую роторную управляемую систему 68, предназначенную для облегчения бурения одного или более горизонтальных стволов 70. Роторная управляемая система 68 может быть любого из различных типов, известных специалистам в этой области, и система 68 используется для ориентирования бурильной коронки 72 для бурения горизонтального ствола скважины 70 до требуемого положения.
В данном конкретном примере множество датчиков 52 используется для предоставления данных системе 54 управления, которая, в свою очередь, направляет сигналы управления множеству гидравлических приводов 50 для снижения вибрационных и ударных нагрузок, которые бы в противном случае проявлялись во время бурения горизонтальной скважины. Система 54 управления может быть расположена на поверхности; однако могут быть использованы другие места для расположения системы управления, которые могут быть выбраны в соответствии с конструкцией бурильной системы и параметрами данных буровых работ. Сигналы могут передаваться между гибким соединителем 20 и системой 54 управления через канал 74 связи. Канал 74 связи может включать в себя проводную линию, такую как кабель, или линию беспроводной связи, использующую способ беспроводной связи, такой как гидроимпульсная скважинная телеметрия.
Хотя только несколько вариантов воплощения настоящего изобретения были описаны подробно выше, специалистам в этой области понятно, что множество модификаций возможно в объеме настоящего изобретения, определяемом пунктами формулы изобретения.
Группа изобретений относится к области бурения направленных скважин. Система обеспечения изгиба в стволе скважины содержит гибкий соединитель, имеющий первый компонент, образующий угол изгиба относительно второго компонента посредством универсального соединителя, и пружинный узел, регулируемый для изменения изгибной жесткости первого компонента относительно второго компонента. Гибкий соединитель дополнительно содержит датчик для измерения перемещения первого компонента относительно второго компонента. Система обеспечения изгиба дополнительно содержит систему привода, которая получает данные с датчика и реагирует для снижения вибрации. Обеспечивается повышение возможности отклонения скважины. 3 н. и 15 з.п. ф-лы, 3 ил.
1. Система обеспечения изгиба в стволе скважины, содержащая гибкий соединитель, имеющий первый компонент, образующий угол изгиба относительно второго компонента посредством универсального соединителя, и пружинный узел, регулируемый для изменения изгибной жесткости первого компонента относительно второго компонента, причем гибкий соединитель дополнительно содержит датчик для измерения перемещения первого компонента относительно второго компонента, а упомянутая система дополнительно содержит систему привода, которая получает данные с датчика и реагирует для снижения вибрации.
2. Система по п.1, в которой гибкий соединитель дополнительно содержит втулку, прикрепленную к одному из первого компонента и второго компонента и проходящую за универсальный соединитель для ограничения изгиба.
3. Система по п.1, в которой пружинный узел содержит рессоры.
4. Система по п.1, в которой гибкий соединитель дополнительно содержит кабель электропитания, проходящий через него.
5. Система по п.1, которая дополнительно содержит по меньшей мере один скважинный датчик, способный передавать данные в систему управления, которая способна обрабатывать данные для проактивной оптимизации условий бурения для снижения ударов и вибрации.
6. Система по п.1, которая дополнительно содержит компоновку низа бурильной колонны, соединенную с гибким соединителем в бурильной колонне.
7. Способ, содержащий следующие стадии:
создание гибкого соединителя с регулируемым пружинным узлом;
подсоединение гибкого соединителя в бурильной колонне;
регулировку регулируемого пружинного узла для обеспечения требуемой изгибной жесткости; и
обеспечение электрической изоляции компонентов гибкого соединителя.
8. Способ по п.7, который дополнительно содержит ограничение степени изгиба гибкого соединителя.
9. Способ по п.7, который дополнительно содержит ограничение степени изгиба гибкого соединителя посредством втулки, проходящей за универсальный соединитель.
10. Способ по п.7, который дополнительно содержит размещение электрического кабеля в гибком соединителе.
11. Способ по п.7, который дополнительно содержит использование гидравлического привода в гибком соединителе для снижения вибрации.
12. Способ по п.7, в котором создание гибкого соединителя содержит оснащение гибкого соединителя регулируемым рессорным узлом.
13. Способ по п.7, в котором подсоединение гибкого соединителя содержит соединение гибкого соединителя в бурильной колонне, содержащий компоновку низа бурильной колонны, имеющую роторную управляемую систему для управления бурильной коронкой.
14. Способ снижения вибрации в бурильной колонне, содержащий:
подсоединение гибкого соединителя в бурильной колонне;
оснащение гибкого соединителя одним приводом, расположенным между компонентами гибкого соединителя, которые перемещаются относительно друг друга;
обнаружение относительного перемещения между компонентами гибкого соединителя посредством датчика;
передачу данных с датчика в систему управления; и
обработку данных в системе управления и использование системы управления для передачи сигналов приводу на основании данных для снижения вибрации бурильной колонны.
15. Способ по п.14, который содержит оснащение гибкого соединителя множеством приводов.
16. Способ по п.14, который содержит оснащение гибкого соединителя гидравлическим приводом.
17. Способ по п.14, в котором обнаружение относительного перемещения между компонентами гибкого соединителя содержит размещение по меньшей мере одного датчика на гибком соединителе.
18. Способ по п.14, в котором оснащение гибкого соединителя по меньшей мере одним приводом содержит соединение привода между внешней втулкой гибкого соединителя и компонентом гибкого соединителя, закрываемого втулкой.
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| Снаряд для направленного бурения | 1978 |
|
SU922263A1 |
| Снаряд для направленного бурения скважин | 1980 |
|
SU972033A1 |
| УСТРОЙСТВО ДЛЯ НАКЛОННО НАПРАВЛЕННОГО БУРЕНИЯ СКВАЖИН | 1991 |
|
RU2039188C1 |
| RU 2055140 C1, 27.02.1996 | |||
| СПОСОБ БУРЕНИЯ СКВАЖИН И ОДНОВРЕМЕННОГО НАПРАВЛЕНИЯ БУРОВОГО ДОЛОТА АКТИВНО КОНТРОЛИРУЕМЫМ ВРАЩАТЕЛЬНЫМ НАПРАВЛЯЕМЫМ СКВАЖИННЫМ БУРОВЫМ УСТРОЙСТВОМ И ВРАЩАТЕЛЬНОЕ НАПРАВЛЯЕМОЕ СКВАЖИННОЕ БУРОВОЕ УСТРОЙСТВО | 1999 |
|
RU2229012C2 |
| Обводный шпил планиметра | 1932 |
|
SU28665A1 |
| US 5797453 A, 25.08.1998 | |||

