Устройство относится к радиолокации и может быть использовано для распознавания классов воздушных целей (ВЦ).
Известно радиолокационное устройство распознавания ВЦ [1], содержащее генератор, N умножителей частоты, N усилителей мощности, модулятор, антенный переключатель (АП), антенну, N приемников, N фазовых детекторов, N пересчетных устройств, N-1 усилителей разностного сигнала, электронно-вычислительную машину (ЭВМ) и устройство отображения (индикатор). При этом генератор своим выходом соединен со входами соответствующих из N умножителей частоты, выходы которых соединены со вторыми входами соответствующих из N усилителей мощности и вторыми входами соответствующих из N фазовых детекторов. Первые входы усилителей мощности соединены со входом модулятора, а выходы через соответствующие из N входов АП - с антенной. Кроме того, N выходов АП соединены со входами соответствующих из N приемников, выходы которых связаны с первыми входами соответствующих из N фазовых детекторов, выходы которых подключены ко входам соответствующих из N пересчетных устройств. Выход каждого n-го со второго по (N-1)-e пересчетное устройство соединен со вторым входом (n-1)-гo и первым входом n-го усилителей разностного сигнала. Выход первого пересчетного устройства соединен с первым входом первого усилителя разностного сигнала, а выход N-гo пересчетного устройства - со вторым входом (N-1)-гo усилителя разностного сигнала. Выходы N-1 усилителей разностного сигнала соединены с соответствующими из N-1 входами ЭВМ, выход которой подключен ко входу устройства отображения (индикатора).
Данное устройство не обеспечивает распознавания ВЦ с высокой вероятностью, т.к. оно предназначено только для измерения максимальных размеров объектов. Распознавание ВЦ устройством [1] проводится с использованием эффекта резонанса. А этот эффект не позволяет учитывать продольные размеры распознаваемых целей на различных ракурсах.
Известно также радиолокационное устройство распознавания ВЦ [2], включающее N антенн, N антенных переключателей, N приемных устройств (ПрУ), N генераторов, импульсный модулятор (ИМ), N-1 линий задержки (ЛЗ), первый и второй главные сумматоры, N-1 сумматоров, N-1 двухполупериодных выпрямителей (ДППВ), делитель и блок идентификации (БИ). При этом каждая n-я антенна соединена входом-выходом с входом-выходом соответствующего АП, каждый n-й АП связан своим входом с выходом соответствующего n-го генератора, а выходом - со входом соответствующего n-го приемного устройства. Выход ИМ соединен со входом каждого из N генераторов, выход первого ПрУ подключен к первому входу первого главного сумматора, выход каждого n-го из N ПрУ подключен к соответствующему n-му входу второго главного сумматора. Выход каждого n-го со второго по N-e приемного устройства связан со входом (n-1)-й ЛЗ, выход каждой n-й из N-1 ЛЗ соединен со вторым входом соответствующего n-го сумматора, выход каждой n-й с первой по (N-2)-ю линий задержки связан с первым входом (n+1)-го сумматора, выход каждого n-го сумматора подключен ко входу соответствующего n-го ДППВ, выход каждого n-го ДППВ соединен с соответствующим n-м входом второго главного сумматора, выход которого связан со входом «делимое» делителя, вход «делитель» которого подключен к выходу первого главного сумматора, а выход - ко входу БИ. Замена названий блоков «сумматор» на «главный сумматор», а также «дополнительный сумматор» на «сумматор» введена при описании [2] умышленно для упрощения описания усовершенствованной схемы устройства.
Устройство [2] не в состоянии обеспечить высокую вероятность распознавания ВЦ. Используемый в нем признак распознавания вычисляется как сумма разностей амплитуд сигналов, отраженных от цели на разных частотах зондирования и разных углах визирования. Если различие амплитуд сигналов на разных частотах зондирования обеспечивается использованием N приемопередающих радиолокационных систем с разными частотами излучения, то различие амплитуд сигналов на разных углах визирования цели предполагает всего лишь прием отраженных сигналов в разные моменты времени, т.е. в течение N последовательных периодов повторения импульсов. При этом известно, что ВЦ в динамике полета изменяет свой ракурс с переменной угловой скоростью поворота, направление которой изменяется непредсказуемо [3-6]. Существуют интервалы времени, на протяжении которых угловая скорость поворота ВЦ (вследствие проявления траекторных нестабильностей полета и перемещения ее центра масс) не меняется. Значит, на таких интервалах изменений амплитуд отраженных сигналов с течением времени происходить не будет, и признак распознавания потеряет свою информативность. Во-вторых, отражение сигналов от вращающихся элементов двигательных установок ВЦ всегда сопровождается возникновением турбовинтового эффекта [7-10], в результате чего низкочастотная огибающая отраженных сигналов искажается высокочастотными флюктуационными составляющими. А используемый признак распознавания основан на анализе низкочастотной огибающей, связанной с отражениями волн от планера ВЦ. Поэтому при возникновении турбовинтового эффекта (ТВЭ) признак будет также снижать свою информативность. И наконец, признак распознавания трактуется как сумма значений главной побочной диагонали матрицы частотно-угловых флюктуации (МЧУФ) ВЦ, представленной на фиг.1 [2]. При этом в остальных элементах такой матрицы заключена не менее ценная информация об индивидуальных особенностях ВЦ. Логика извлечения признака показывает, что при формировании его результирующего значения целесообразно использовать всю информацию МЧУФ ВЦ, что реализуемо только в цифровом виде.
Отмеченные недостатки говорят о необходимости совершенствования известного устройства [2]. Направлениями совершенствования устройства [2] являются:
адаптивный выбор интервала времени, в пределах которого используемый признак распознавания обладает наибольшей информативностью вследствие изменения ракурса локации ВЦ с наибольшей угловой скоростью;
нейтрализация негативного влияния турбовинтового эффекта;
обеспечение выделения из сформированной матрицы частотно-угловых флюктуации максимума информации об индивидуальных особенностях планера распознаваемой ВЦ.
Положительный технический эффект, достигаемый за счет совершенствования известного устройства, заключается в повышении информативности используемого признака распознавания и соответствующем повышении вероятности правильного распознавания классов или типов ВЦ.
Указанный технический эффект достигается тем, что известное устройство распознавания ВЦ, состоящее из N антенн, N АП, N генераторов, N ПрУ, импульсного модулятора, (N-1) ЛЗ, (N-1) сумматоров, причем вход-выход каждой антенны связан со входом-выходом соответствующего АП, вход каждого АП соединен с выходом соответствующего генератора, а выход - со входом соответствующего ПрУ, выход ИМ связан одновременно со входом каждого генератора, выход каждой n-й ЛЗ подключен ко второму входу соответствующего n-го сумматора; выход каждой n-й с первой по (N-2)-ю ЛЗ соединен с первым входом соответствующего (n+1)-го сумматора, дополняют N низкочастотными фильтрами (НЧФ), N первыми аналого-цифровыми преобразователями (АЦП), N-1 вторыми аналого-цифровыми преобразователями, цифровой электронно-вычислительной машиной (ЦЭВМ) и индикатором. При этом вход каждого n-го НЧФ связывают с выходом соответствующего n-го ПрУ, а выход - со входом соответствующего n-го первого АЦП, выход первого НЧФ подключают к первому входу первого сумматора, вход каждой n-й из N-1 ЛЗ соединяют с выходом соответствующего (n+1)-го НЧФ, выход каждого из N-1 сумматоров связывают со входом соответствующего второго АЦП, выход каждого n-го первого АЦП подключают к соответствующему n-му входу ЦЭВМ, каждый s-й с (N+l)-го по (2N-1)-й входы ЦЭВМ соединяют с выходом соответствующего (s-N)-го второго АЦП, а выход ЦЭВМ связывают со входом индикатора.
Такое обновленное построение структурной схемы устройства обеспечивает повышение вероятности распознавания классов ВЦ за счет нейтрализации ТВЭ, адаптивного выбора интервала анализа отраженных сигналов и использования при распознавании всех элементов МЧУФ.
На фиг.2 показана структурная схема радиолокационного устройства распознавания ВЦ. Устройство содержит N антенн 1, N антенных переключателей 2, N генераторов 3, N приемных устройств 4, N НЧФ 6, ИМ 5, N первых АЦП 7, N-1 ЛЗ 8, N-1 сумматоров 9, N-1 вторых АЦП 10, ЦЭВМ 11 и индикатор 12. При этом вход-выход каждой антенны 1 связан с входом-выходом соответствующего из N АП 2, вход каждого АП 2 соединен с выходом соответствующего генератора 3, входы всех генераторов 3 подключены одновременно к выходу ИМ 5. Выход каждого АП 2 связан с входом соответствующего ПрУ 4, а выход каждого приемного устройства 4 соединен со входом соответствующего НЧФ 6. Выход каждого n-го из N НЧФ 6 подключен к входу соответствующего первого АЦП 7 из N первых АЦП 7. Выход первого из N НЧФ 6 подключен к первому (прямому) входу первого сумматора 9. Вход каждой n-й из N-1 ЛЗ 8 связан с выходом соответствующего (n+1)-го НЧФ 6. Выход каждой n-й ЛЗ 8 соединен со вторым (инверсным) входом соответствующего n-го сумматора 9. Выход каждой n-й с первой (N-2)-ю ЛЗ 8 подключен к первому (прямому) входу соответствующего n-го сумматора 9. Вход каждого второго АЦП 10 связан с выходом соответствующего сумматора 9. Каждый с первого по N-й вход ЦЭВМ 11 соединен с выходом соответствующего первого АЦП 7. Остальные s-e с (N+l)-го по (2N-1)-й входы ЦЭВМ 11 связаны с выходами соответствующих (s-N)-x вторых АЦП 10, а выход ЦЭВМ 11 подключен ко входу индикатора 12.
Аналого-цифровой преобразователь, ЦЭВМ и индикатор как новые элементы схемы широко известны в радиотехнических устройствах, в том числе и в устройствах распознавания целей.
Радиолокационное устройство распознавания ВЦ работает следующим образом. С помощью импульсного модулятора 5 возбуждаются генераторы 3, генерирующие сигналы на несущих частотах с разносом частоты Δf, которые излучаются через АП 2 и антенны 1 в направлении распознаваемой цели. Разнос частот Δf составляет величину порядка единиц МГц. Основная несущая частота f0 составляет величину порядка 10 ГГц, что определяет сантиметровый диапазон длин волн при излучении.
Отраженные от ВЦ сигналы принимаются антеннами 1 и через АП 2 поступают на приемные устройства 4, которые содержат в своем составе преобразователи частот, фильтры, усилители, амплитудные детекторы и видеоусилители (на фиг.2 не показаны). Фильтры, входящие в состав приемных устройств, пропускают сигналы, соответствующие используемым частотам зондирования. Частота обрабатываемых сигналов понижается в приемных устройствах 4 до промежуточной. При переносе сигналов на промежуточную частоту учитывается разнос частот, что позволяет дальнейшую обработку вести во всех N приемных устройствах на одинаковой промежуточной частоте. Усиление сигналов в приемных устройствах 4 ведется на промежуточной частоте, составляющей величину порядка десятков МГц, что не позволяет исключить при фильтрации (выделении отраженных сигналов только на собственной n-й частоте излучения) высокочастотные составляющие отраженного сигнала, обусловленные турбовинтовым эффектом и лежащие в диапазоне единиц-десятков кГц. С выходов приемных устройств 4 видеосигналы, отраженные от ВЦ на разных частотах, подаются на соответствующие НЧФ 6. Данные фильтры 6 пропускают сигналы низкочастотных составляющих спектра отраженного сигнала, связанных с отражениями от планера ВЦ, и задерживают высокочастотные составляющие, связанные с отражениями радиоволн от вращающихся элементов конструкции двигательных установок ВЦ. Далее сигналы низких частот, обусловленных отражениями радиоволн от планера ВЦ, поступают на первые АЦП 7, где их амплитуды преобразуются в цифровую форму. Оцифрованные сигналы, отраженные целью на N частотах, поступают на входы ЦЭВМ 11, где записываются в оперативную память. Причем запись отраженных сигналов проводится в течение длительного (порядка 5 с) времени Т3.
Из оцифрованных амплитуд отраженных сигналов в оперативной памяти ЦЭВМ 11 создаются N массивов данных. Обозначим n-й массив данных отраженных сигналов Аn. В n-м массиве данных Аn будут записаны отражения от ВЦ, принятые в последовательные периоды времени при облучении ВЦ сигналами на n-й частоте. Вместе с амплитудами отраженных сигналов в массиве Аn фиксируются точные времена приема отраженных импульсов.
В результате каждый n-й массив отраженных сигналов будет иметь вид
An=(an1 an2…ank…anK),
где k - порядковый номер принятого отраженного сигнала на n-й частоте зондирования; К - общее число принятых на n-й частоте отраженных сигналов.
Допускается фиксация времени прихода только первого отраженного сигнала, поскольку время прихода любого последующего k-го сигнала может быть рассчитано по формуле tk=(k-1)Ти, где Ти - период повторения импульсов.
Время записи отраженных сигналов Тз должно быть не менее 5 секунд. Это связано с тем, что полупериод рысканий планера ВЦ при полете в турбулентной атмосфере составляет величину 2-3 с [3]. Таким образом, на интервале Тз обязательно будет присутствовать момент максимизации угловой скорости поворота ВЦ при траекторных нестабильностях (ТН) полета. Именно в этот момент целесообразно формировать признак распознавания в виде обработанной и проанализированной МЧУФ.
Для определения момента времени, соответствующего максимальной угловой скорости поворота планера ВЦ при траекторных нестабильностях (ТН), предлагается использовать корреляционную характеристику отраженного сигнала. Вариант расчета коэффициентов корреляции Кк в пределах частных выборок отраженных сигналов приведен в [6, 11], а вид (вариант) корреляционной характеристики (КХ) отраженных сигналов показан в [4].
В пределах каждого массива Аn выделяются частные выборки отраженных сигналов из S последовательно взятых элементов массива. Длительность частных выборок Тчв должна составлять величину порядка 0,1-0,3 с. Выбрав соответствующую длительность частной выборки сигналов, можно определить число ее членов в массиве Аn по формуле S=Тчв/Ти. По значениям коэффициентов автокорреляции, рассчитанных в пределах последовательно взятых (со смещением на один элемент) частных выборок, формируется корреляционная характеристика. Для каждого массива Аn формируется своя КХ. Всего в пределах интервала Тз будет сформировано N КХ. Методом усреднения из N частных КХ (фиг.3а) формируется усредненная КХ (фиг.3б), а из нее методом сглаживания [12] формируется усредненная сглаженная КХ. В пределах сглаженной КХ определяют точку глобального минимума tmin (фиг.3б). Момент, соответствующий точке tmin, принимают за середину интервала формирования матрицы частотно-угловых флюктуации (фиг.1). В этом состоит сущность адаптивного подхода к формированию признака распознавания.
Для формирования МЧУФ могут быть использованы переведенные в цифровую форму величины амплитуд отраженных сигналов, поступающие в последовательные моменты времени в ЦЭВМ с выходов первых АЦП 7.
Однако признак распознавания, предложенный в [2], заключается не в величинах элементов МЧУФ, а в сумме разностей ее смежных элементов, составляющих побочную диагональ (данный признак, как и в прототипе, сравнивается в дальнейшем в ЦЭВМ 11 с набором пороговых сигналов, и в результате сравнения определяется класс цели, в соответствии с кодом которого по сигналу из ЦЭВМ в индикаторе 12 загорается табло или лампа с названием установленного класса ВЦ). Таких разностей в главной побочной диагонали матрицы можно сформировать N-1. Для одновременного формирования таких разностей в прототипе и используются N-1 ЛЗ.
В предложенном устройстве такие разности формируются на выходах N-1 сумматоров 9, после чего они переводятся в цифровой вид с помощью соответствующих вторых АЦП 10. На вход каждой n-й ЛЗ 8 с первой по (N-l)-ю поступают сигналы с выхода соответствующего (n+1)-го НЧФ 6. Линии задержки 8 имеют различные времена задержки [2]. Первая из N-1 ЛЗ 8 задерживает входной сигнал на величину Ти, вторая - на величину 2Ти и т.д. Значит, каждая n-я ЛЗ 8 задерживает входной сигнал на величину nТи. Сумматоры 9 имеют прямые и инверсные входы. На выходе сумматора 9 формируется сигнал, равный по амплитуде разности амплитуд сигналов, поступающих на его прямой и инверсный входы. Тем самым на выходе n-го сумматора 9 обеспечивается формирование сигнала, равного разности сигналов, отраженных ВЦ на (n-1)-й и n-й частоте зондирования. По прошествии N периодов повторения импульсов на выходах N-1 сумматоров 9 будут одновременно выделены сигналы, равные разностям амплитуд сигналов, полученных при отражении волн от ВЦ на смежных частотах зондирования в смежных периодах повторения (в смежные моменты времени).
На выходе 1-го сумматора 9, к примеру, по истечении N периодов будет выделен сигнал, равный разности  , где
, где  - амплитуда сигнала, полученная при отражении от ВЦ в N-м периоде повторения на частоте f1 (первой частоте);
- амплитуда сигнала, полученная при отражении от ВЦ в N-м периоде повторения на частоте f1 (первой частоте);  - амплитуда сигнала, полученная при отражении от ВЦ в (N-1)-м периоде повторения на частоте f2 (второй частоте). На выходе 2-го сумматора 9 в этот же момент времени будет выделен сигнал, численно равный разности
- амплитуда сигнала, полученная при отражении от ВЦ в (N-1)-м периоде повторения на частоте f2 (второй частоте). На выходе 2-го сумматора 9 в этот же момент времени будет выделен сигнал, численно равный разности  . На выходе 3-го сумматора 9 - сигнал, численно равный
. На выходе 3-го сумматора 9 - сигнал, численно равный  - так далее. Эти разности могут быть вычислены как разности смежных членов главной побочной диагонали МЧУФ. Выделенные сумматорами 9 разности оцифровываются вторыми АЦП 10 и поступают на входы ЦЭВМ 11, где вычисляются их абсолютные значения (модули). Затем эти разности и соответствующие им времена записываются в матрицу, аналогичную МЧУФ.
- так далее. Эти разности могут быть вычислены как разности смежных членов главной побочной диагонали МЧУФ. Выделенные сумматорами 9 разности оцифровываются вторыми АЦП 10 и поступают на входы ЦЭВМ 11, где вычисляются их абсолютные значения (модули). Затем эти разности и соответствующие им времена записываются в матрицу, аналогичную МЧУФ.
Число элементов побочной диагонали этой матрицы равно N-1, т.е. числу одновременно сформированных разностей амплитуд на выходах сумматоров 9. Одна из диагоналей такой сформированной матрицы разностей графически показана на фиг.4. Черными жирными точками обозначены положения (места) элементов, в которые записываются разности амплитуд сигналов. Порядок расположения разностей в графически представленной побочной диагонали соответствует значениям амплитуд, записанным в МЧУФ.
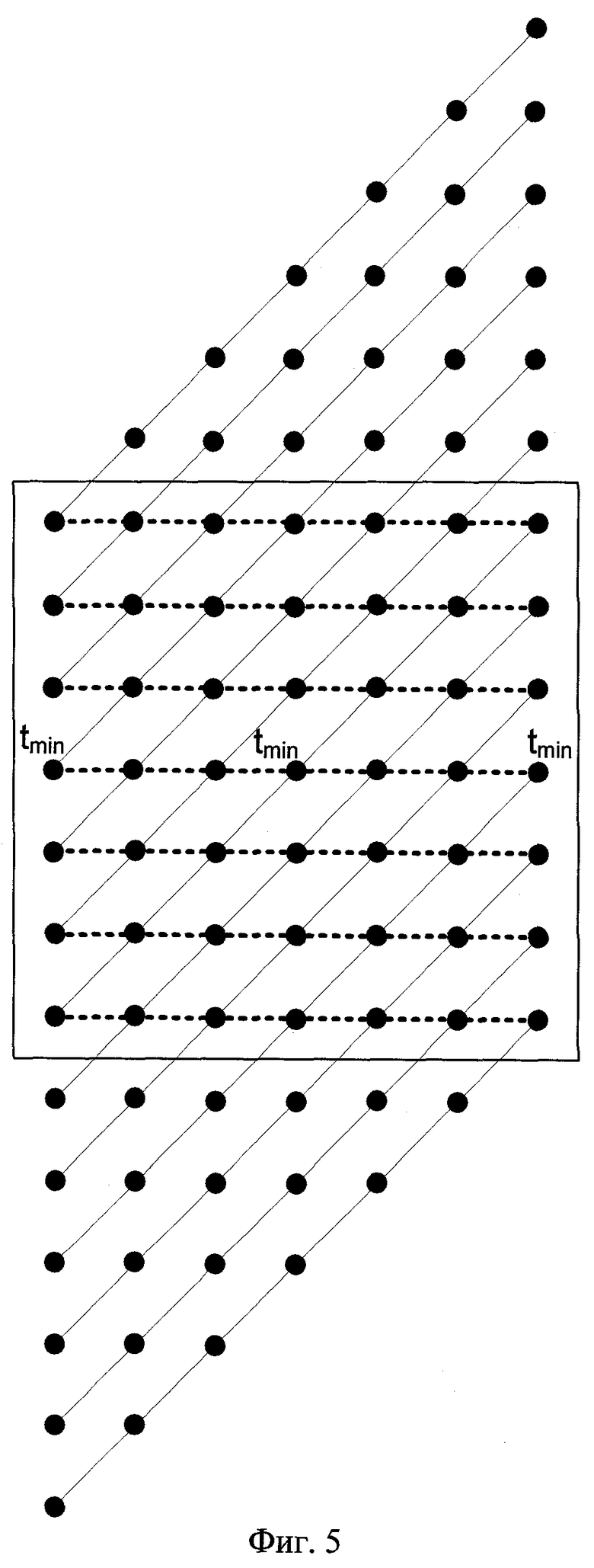
Если последовательно записывать в матрицу разностей значения элементов диагоналей, поступающих в последовательные моменты времени с выходов сумматоров 9, то можно сформировать избыточную матрицу разностей, графически представленную на фиг.5.
После проведения корреляционной обработки с данными массивов Аn и определения времени tmin, соответствующего максимальной угловой скорости поворота ВЦ, в избыточной матрице разностей (фиг.5) определяют строку, соответствующую этому моменту времени tmin. Такую строку принимают за центральную строку выделяемой квадратной матрицы разностей, обведенной на фиг.5 сплошной линией. В элементах выделенной квадратной матрицы разностей заключена информация, используемая для распознавания ВЦ. Элементы квадратной матрицы разностей суммируются. Полученная сумма делится на (аналогично прототипу) сумму амплитуд сигналов, записанных в МЧУФ, соответствующую по времени выделенной квадратной матрице разностей. Деление обеспечивает независимость признака распознавания от дальности до ВЦ.
Таким образом, различительный признак распознавания формируется в результате почленного смежного вычитания сигналов на N частотах зондирования под N углами визирования. Предложенное устройство в отличие от прототипа нейтрализует негативное влияние турбовинтового эффекта, адаптивно выбирает для формирования признака распознавания интервал времени с максимальной угловой скоростью поворота ВЦ относительно линии визирования, а также использует при выделении признака распознавания большее число смежных углов локации объекта и большее число смежных частот зондирования, что обеспечивает принятие решения об отнесении цели к одному из классов с большей достоверностью.
Источники информации
1. Небабин В.Г., Сергеев В.В. Методы и техника радиолокационного распознавания. М., Радио и связь, 1984. с.79, рис.3-21 (аналог).
2. Патент РФ №2095823. МПК6 G01S 13/02. Радиолокационное устройство распознавания воздушных целей. Ермоленко В.П., Коваленков Н.Н., Митрофанов Д.Г., Юдин В.А. Заявка №95119371. Приоритет 13.11.1995 г. Опубл. 10.11.1997 г. Бюл. №31 (прототип).
3. Доброленский Ю.П. Динамика полета в неспокойной атмосфере. М., Машиностроение, 1969. 256 с.
4. Митрофанов Д.Г. Метод построения радиолокационных изображений аэродинамических летательных аппаратов // Полет, 2006. №11, с.52-60.
5. Справочник по радиолокации. / Под ред. М.И.Сколника. Пер. с англ. М., Сов. радио, 1967. Т.1. Основы радиолокации. - 456 с.
6. Митрофанов Д.Г. Комплексный адаптивный метод построения радиолокационных изображений в системах управления двойного назначения // Известия РАН. Теория и системы управления, 2006. №1, с.101-118.
7. Слюсарь Н.М. Рассеяние электромагнитных волн динамическими объектами. Приближение квазистационарности и физической оптики // Рассеяние электромагнитных волн. Таганрог: ТРТИ, 1987. Вып.6, с.3-12.
8. Слюсарь Н.М. Рассеяние электромагнитных волн лопасями воздушных винтов // Прикладные задачи электродинамики. Л.: ЛИАП, 1988, с.105-136:
9. Радиоэлектронные системы. Справочник. Основы построения и теория. / Под ред. Я.Д.Ширмана. М., Радиотехника, 2007, 510 с.
10. Митрофанов Д.Г. Формирование радиолокационных изображений при негативном влиянии турбовинтовой модуляции // Измерительная техника, 2005, №7, с.60-64.
11. Митрофанов Д.Г. Алгоритмы адаптивного метода построения двумерного радиолокационного изображения // Измерительная техника, 2004. №11, с.6-11.
12. Кирьянов Д.В. Mathcad 12. - СПб.: БХВ-Петербург, 2005. - 576 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ ДВУХЧАСТОТНЫМ СПОСОБОМ | 2009 |
|
RU2407033C1 |
| УСТРОЙСТВО КЛАССИФИКАЦИИ РАДИОЛОКАЦИОННЫХ ОБЪЕКТОВ НАБЛЮДЕНИЯ ПО ИНТЕНСИВНОСТИ АМПЛИТУДНЫХ ФЛЮКТУАЦИЙ | 2010 |
|
RU2425395C2 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ ДВУХЧАСТОТНЫМ СПОСОБОМ | 1999 |
|
RU2144681C1 |
| УСТРОЙСТВО КЛАССИФИКАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ С ТРАЕКТОРНЫМИ НЕСТАБИЛЬНОСТЯМИ ДВИЖЕНИЯ | 2009 |
|
RU2416106C2 |
| УСТРОЙСТВО ИДЕНТИФИКАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ ПО СТРУКТУРЕ ДАЛЬНОСТНОГО ПОРТРЕТА | 2012 |
|
RU2513041C2 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ С АДАПТИВНЫМ ВЫБОРОМ МОМЕНТА АНАЛИЗА ОТРАЖЕННОГО СИГНАЛА | 2008 |
|
RU2377596C1 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ | 1996 |
|
RU2096803C1 |
| УСТРОЙСТВО ЛОГИЧЕСКОГО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 1998 |
|
RU2149420C1 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ЦЕЛЕЙ | 1996 |
|
RU2099736C1 |
| РЛС РАСПОЗНАВАНИЯ ЦЕЛЕЙ | 1996 |
|
RU2095825C1 |




Изобретение относится к радиолокации и может быть использовано для распознавания классов воздушных объектов. Достигаемым техническим результатом изобретения является повышение достоверности радиолокационного распознавания аэродинамических целей в квазиоптической области отражения радиоволн за счет устранения негативного влияния турбовинтового эффекта, адаптивного выбора наиболее информативного интервала формирования признака распознавания и использования максимума информации, заключенной в матрице частотно-угловых флюктуаций, отраженных воздушной целью сигналов. Для достижения указанного результата в состав устройства предлагается включить низкочастотные фильтры и проводить обработку с отраженными сигналами в цифровом виде по специально разработанному алгоритму. Для перехода от аналоговой обработки к цифровой предлагается дополнить устройство соответствующим количеством аналого-цифровых преобразователей. Переход к цифровой обработке отраженных сигналов позволяет проводить корреляционный анализ принятых реализаций отраженных сигналов для нахождения момента времени, соответствующего максимальной угловой скорости поворота объекта относительно радиолокатора. 5 ил.
Радиолокационное устройство распознавания воздушных целей, состоящее из N антенн, N антенных переключателей, N генераторов, N приемных устройств, импульсного модулятора, N-1 линий задержки, N-1 сумматоров, причем вход-выход каждой антенны связан со входом-выходом соответствующего антенного переключателя, вход каждого антенного переключателя соединен с выходом соответствующего генератора, а выход - со входом соответствующего приемного устройства, выход импульсного модулятора связан одновременно со входом каждого генератора, выход каждой n-й линии задержки подключен ко второму входу соответствующего n-го сумматора, выход каждой n-й с первой по (N-2)-ю линии задержки соединен с первым входом соответствующего (n+1)-го сумматора, отличающееся тем, что в его состав дополнительно введены N низкочастотных фильтров, N первых аналого-цифровых преобразователей, N-1 вторых аналого-цифровых преобразователей, индикатор и цифровая электронно-вычислительная машина, предназначенная для формирования признака распознавания воздушной цели путем почленного смежного вычитания амплитуд сигналов, полученных при отражении сигналов от воздушной цели на смежных частотах зондирования в смежных периодах повторения, причем вход каждого n-го низкочастотного фильтра связывают с выходом соответствующего n-го приемного устройства, а выход - со входом соответствующего n-го первого аналого-цифрового преобразователя, выход первого низкочастотного фильтра подключают к первому входу первого сумматора, вход каждой n-й из N-1 линий задержки соединяют с выходом соответствующего (n+1)-го низкочастотного фильтра, выход каждого из N-1 сумматоров связывают со входом соответствующего второго аналого-цифрового преобразователя, выход каждого n-го из N первых аналого-цифровых преобразователей подключают к соответствующему n-му входу цифровой электронно-вычислительной машины, каждый s-й с (N+1)-го no (2N-1)-й входы цифровой электронно-вычислительной машины соединяют с выходом соответствующего (s-N)-го из (N-1) вторых аналого-цифровых преобразователей, а выход цифровой электронно-вычислительной машины связывают со входом индикатора.
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ | 1995 |
|
RU2095823C1 |
| RU 95110012 A1, 10.06.1997 | |||
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ ДВУХЧАСТОТНЫМ СПОСОБОМ | 1999 |
|
RU2144681C1 |
| RU 95104681 A1, 27.01.1997 | |||
| US 4647931 A, 03.03.1987 | |||
| US 3614779 A, 19.10.1971 | |||
| WO 2006133268 A2, 14.12.2006. | |||

