Изобретение относится к машиностроению, а именно к способам управления ЛА вертолетного типа и устройствам для их осуществления.
Известен способ управления ЛА вертолетного типа с помощью автомата перекоса Б.Н. Юрьева (Фатеев С.С. «Основы конструкции вертолетов». М.: Военное издательство, 1990, стр.168). С помощью автомата перекоса управляют величиной и направлением силы тяги несущего винта. Недостатком этого способа является практическая невозможность размещения движителя в одной из секущих поверхностей корпуса ЛА.
Данный недостаток устранен в способе управления ЛА вертолетного типа (см. RU 2389651, B64C 27/28, B64B 29/00, опубл. 27.07.2007), включающем винтонесущие гондолы, установленные с возможностью поворота, причем каждая гондола имеет ось вращения, обеспечивающую ее свободный поворот на 90° из крайнего практически вертикального положения взлета в крайнее практически горизонтальное положение. Недостатком вышеописанного способа является ограниченность возможностей маневрирования ЛА, предоставляемых одностепенной системой управления.
Данный недостаток устранен в способе управления ЛА вертолетного типа, изложенном в патенте RU 82674 U1, кл. B64C 29/00, опубл. 10.05.2009 и являющемся наиболее близким к изобретению. Способ включает смещение центра тяжести ЛА относительно равнодействующей аэродинамических сил, которое осуществляется тележкой, выполняющей роль балансира и расположенной в области нижней точки нижней полусферы сферического корпуса ЛА. Тележка имеет возможность перемещения от крайней нижней точки нижней полусферы до экваториальной плоскости сферического корпуса в любой меридиональной плоскости.
Недостатком данного способа является потребность в значительном внутреннем объеме, занимаемом тележкой с учетом всех ее возможных положений.
Техническим результатом предлагаемого изобретения является уменьшение объема, необходимого для системы управления ЛА вертолетного типа. Технический результат достигается тем, что смещение центра тяжести корпуса относительно тяги движителя осуществляют в сторону требуемого направления изменения траектории полета, а роль балансира выполняет корпус со всеми находящимися в нем элементами за исключением движителя.
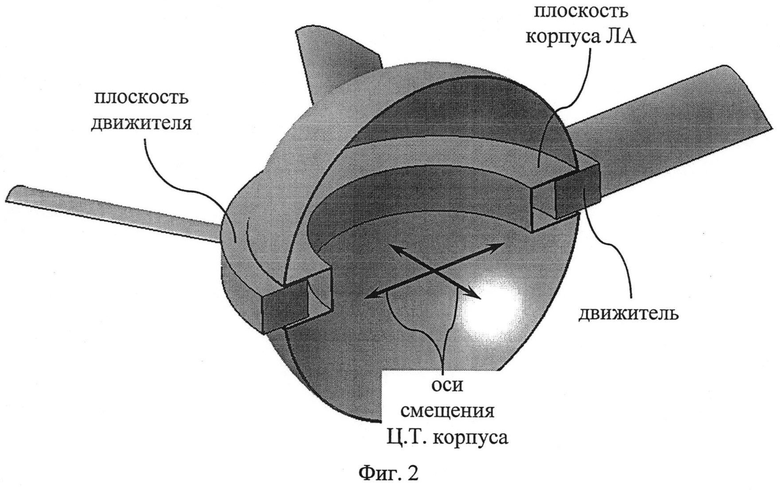
Данное изобретение пояснено на Фиг.1 в двух вариантах направления выпуклости сферической поверхности. Последовательные усовершенствования предложенного технического решения пояснены на Фиг 2.
Способ включает смещение центра тяжести корпуса ЛА относительно тяги движителя в сторону требуемого направления изменения траектории полета, при этом смещение осуществляют по сферической поверхности с центром, лежащим вне ЛА, или цилиндрической поверхности с осевой линией, лежащей вне ЛА, как показано на Фиг.1.
Предложенный способ может быть усовершенствован с целью упрощения конструкции ЛА. Усовершенствованный способ отличается от исходного тем, что радиус сферической или цилиндрической поверхности бесконечно большой.
Усовершенствованный способ включает смещение центра тяжести корпуса ЛА относительно тяги движителя в сторону требуемого направления изменения траектории полета, при этом смещение осуществляют в плоскости, как показано на Фиг.2.
Усовершенствованный способ тоже может быть усовершенствован с целью упрощения конструкции ЛА. Усовершенствованный способ отличается от предыдущего тем, что смещение осуществляют поступательно.
Усовершенствованный способ включает смещение центра тяжести корпуса ЛА относительно тяги движителя в сторону требуемого направления изменения траектории полета, при этом смещение осуществляют поступательно, например, вдоль координатных осей, показанных на Фиг.2.
| название | год | авторы | номер документа |
|---|---|---|---|
| Комбинированный способ управления летательным аппаратом (ЛА) | 2017 |
|
RU2771513C2 |
| Несущий винтокольцевой движитель | 2017 |
|
RU2691677C2 |
| Ротор летательного аппарата вертолётного типа | 2015 |
|
RU2620501C2 |
| Экраноплан с двигательной установкой, выполненной по схеме мультикоптера | 2023 |
|
RU2833275C1 |
| КОМБИНИРОВАННАЯ ОПОРА (ВАРИАНТЫ) | 1999 |
|
RU2224145C2 |
| СПОСОБ УПРАВЛЕНИЯ КОНВЕРТОПЛАНОМ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2022 |
|
RU2795885C1 |
| СПОСОБ УПРАВЛЕНИЯ, СТАБИЛИЗАЦИИ И СОЗДАНИЯ ДОПОЛНИТЕЛЬНОЙ ПОДЪЕМНОЙ СИЛЫ ДИРИЖАБЛЯ | 2013 |
|
RU2532448C1 |
| Беспилотный летательный аппарат вертолетного типа | 2022 |
|
RU2792460C1 |
| Конвертоплан | 2024 |
|
RU2835584C1 |
| Способ работы многоступенчатых осевых машин | 2017 |
|
RU2691706C2 |
Изобретение относится к области авиации, в частности к способам управления ЛА вертолетного типа. Способ управления ЛА включает смещение центра тяжести ЛА относительно тяги движителя, при этом смещение осуществляют по сферической поверхности с центром, лежащим вне ЛА, или цилиндрической поверхности с осевой линией, лежащей вне ЛА. Радиус сферической или цилиндрической поверхности может быть бесконечно большой. При этом смещение движителя может быть поступательным. Достигается уменьшение габаритов системы управления летательным аппаратом вертолетного типа. 2 з.п. ф-лы, 2 ил.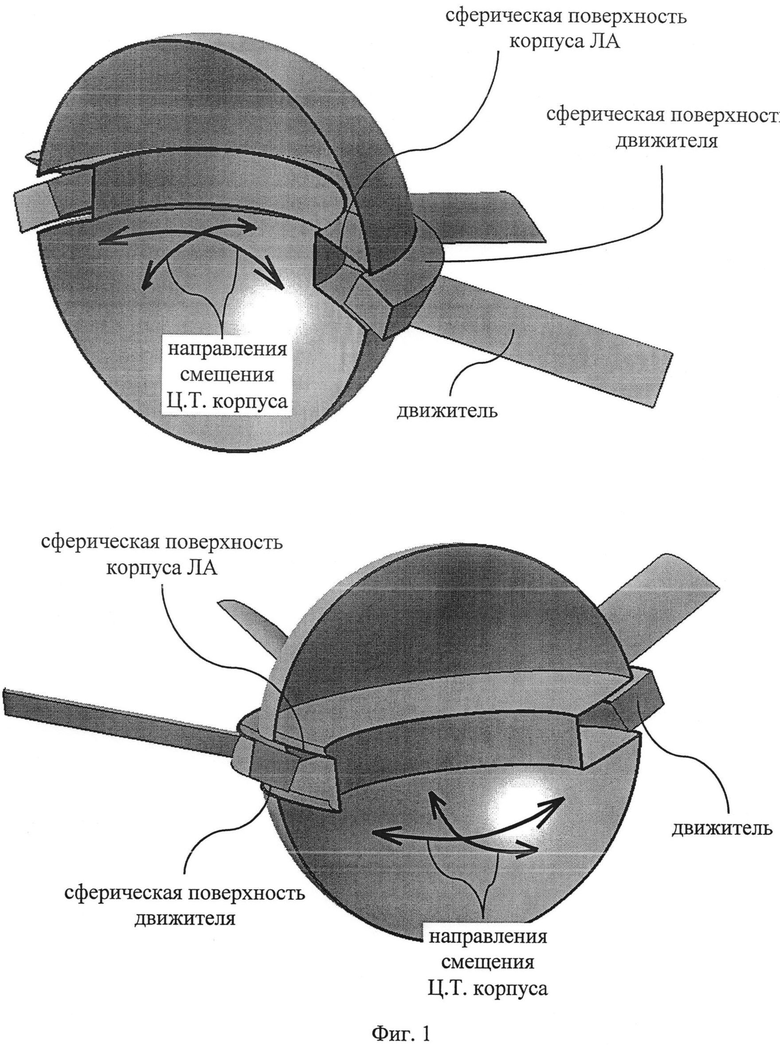
1. Способ управления ЛА вертолетного типа, включающий смещение центра тяжести корпуса ЛА относительно тяги движителя, отличающийся тем, что смещение осуществляют по сферической поверхности с центром, лежащим вне ЛА, или цилиндрической поверхности с осевой линией, лежащей вне ЛА.
2. Способ управления ЛА вертолетного типа по п.1, отличающийся тем, что радиус сферической или цилиндрической поверхности бесконечно большой.
3. Способ управления ЛА вертолетного типа по п.2, отличающийся тем, что смещение поступательное.
| US 20100096490 A1, 22.04.2010 | |||
| US 20070215750 A1, 20.09.2007 | |||
| Способ бокового затылования, прорезания спиральных канавок и заточки глобоидных червячных фрез на зубофрезерном станке | 1949 |
|
SU82674A1 |
| ЭЛЕКТРИЧЕСКИЙ МАКСИМАЛЬНЫЙ ОГРАНИЧИТЕЛЬ ПЕРЕМЕННОГО ТОКА | 1925 |
|
SU6267A1 |

