Изобретение относится к области измерительной техники и может быть использовано в нефтепромысловой геофизике для определения углового положения буровой скважины, а также в геомагнитной навигации для определения углов курса, крена и тангажа подвижного объекта. Изобретение предназначено для контроля пространственного положения траектории ствола скважин в процессе их строительства. Техническим результатом является повышение точности и виброустойчивости измерений, а также снижение стоимости инклинометра без потери точности измерения.
Известен инклинометр [Патент RU 2247942 C1], включающий трехкомпонентный магнитометрический датчик, трехкомпонентный акселерометр и корпус инклинометра, продольная ось которого коллинеарна одной из осей трехкомпонентного датчика и одной из осей трехкомпонентного акселерометра, снабженный немагнитной платформой, размещенной в корпусе инклинометра, и регулировочным устройством, при этом трехкомпонентный акселерометр размещен на немагнитной платформе, а регулировочное устройство выполнено с возможностью изменения углов крена и тангажа трехкомпонентного магнитометрического датчика относительно упомянутой платформы.
В известном инклинометре применена дорогостоящая немагнитная платформа, которая также увеличивает размеры корпуса инклинометра, а требуемая точность достигается путем регулировки платформы относительно корпуса инклинометра. Регулировочное устройство с платформой снижает виброустойчивость инклинометра за счет механического крепления платформы относительно корпуса. Также для перекрытия всего диапазона вибраций без потери точности требуются дорогостоящие акселерометры с большим током потребления.
Известен инклинометр [Патент RU 2348008 С2], который по совокупности существенных признаков наиболее близок к предлагаемому изобретению и принят за прототип. Инклинометр состоит из трехкомпонентного акселерометра 1 с диапазоном, достаточным для измерения вектора силы тяжести, трехкомпонентного акселерометра 2 с диапазоном, достаточным для измерения суммы ускорения свободного падения и виброускорения, действующего на инклинометр, трехкомпонентного магнитометра, датчика температуры, микроконтроллера. Акселерометр 1 высокостабильный имеет малый диапазон измерений. Акселерометр 2 имеет широкий диапазон, но обладает большим дрейфом смещения нуля, который корректируется по показаниям акселерометра 1.
В известном инклинометре в режиме «динамика» измерения проходят по «грубому» акселерометру 2, который имеет погрешность определения координат больше 0,2° по зенитному углу, а также акселерометр 2 корректируется по акселерометру 1 в скважине, что вносит дополнительную погрешность в измерение, особенно в условиях вибрации.
Задачей изобретения является повышение виброустойчивости инклинометра при обеспечении высокой точности измерений и невысокой стоимости инклинометра.
Поставленная задача решается предлагаемым способом повышения виброустойчивости инклинометра, состоящего из трех ортогональных магнитометрических датчиков, трех стабильных и точных ортогональных акселерометрических датчиков, трех акселерометрических датчиков большого диапазона ускорений, датчика температуры, аналого-цифрового преобразователя, цифрового сигнального процессора, преобразователя интерфейса и импульсного преобразователя напряжения, заключающимся в том, что цифровой сигнальный процессор последовательно с периодом опроса 1 мс считывает с помощью аналого-цифрового преобразователя данные с трех магнитометрических и шести акселерометрических датчиков в течение 4 секунд, образуя девять массивов накопленных измерений: Gx[4096], Gy[4096], Gz[4096], Vx[4096], Vy[4096], Vz[4096], Hx[4096], Hy[4096], Hz[4096], также считывается текущая температура с датчика температуры, затем цифровой сигнальный процессор вычисляет промежуточные средние значения Gxcp, Gycp, Gzcp, Vxcp, Vycp, Vzcp, максимальные и минимальные значения Gxмax, Gxmin, Gyмax, Gymin, Gzмax, Gzmin, затем сравнивает разности (Gxмax-Gxcp), (Gxcp-Gxmin), (Gyмax-Gycp), (Gycp-Gymin), (Gzмax-Gzcp), (Gzcp-Gzmin) с порогом «дрожания» измерений, который характеризуется верхним порогом отклонения максимального или минимального значения от среднего и если каждая из разностей меньше порога «дрожания», значит, в текущий момент нет бурения (например, при наращивании буровой колонны) и инклинометр переключается в режим «статика», в этом режиме процессор запоминает это и еще два измерения с промежутком 10 секунд, вычисляет инклинометрические углы, записывает их в память с пометкой «СТ1», «СТ2», «СТ3» для последующей передачи в скважинный прибор при возобновлении бурения, а если любая из разностей больше порога «дрожания», значит, в текущий момент нельзя замерять статику и процессор сравнивает каждое измеренное значение с акселерометров Gxi, Gyi, Gzi [i=0…4095] с заданным в установках пороговым значением «перегрузка» (для акселерометров это значение равно 95% от максимального рабочего диапазона). Например: для акселерометров диапазона ±4G пороговое значение равно 3,8G. Если величина модуля текущего i измерения меньше порогового значения «перегрузка», значит идет бурение и инклинометр переключается в режим «динамика», а если величина модуля текущего i измерения по любой координате больше или равна пороговому значению, то процессор переключается в режим «перегрузка», в этом режиме все i измерение по всем трем координатам Gxi, Gyi, Gzi заменяются на i измерение Vxi, Vyi, Vzi, причем после того как процессор определил текущий режим измерения и произвел заполнение массивов, во всех режимах производится усреднение накопленных измерений по каждой координате акселерометров, а также процессор проводит усреднение по каждой координате магнитометров Нхср, Hycp, Hzcp из массивов Нх[4096], Hy[4096], Hz[4096], после чего работа инклинометра продолжается в штатном режиме.
Предлагаемый способ повышения виброустойчивости работы инклинометра реализуется с помощью инклинометра, изображенного на блок-схеме.
Инклинометр содержит корпус 1, три ортогональных магнитометрических датчика 2, три стабильных и точных ортогональных акселерометрических датчика 3, три акселерометрических датчика большого диапазона ускорений 4, датчик температуры 5, аналого-цифровой преобразователь (АЦП) 6, цифровой сигнальный процессор (ЦСП) 7, преобразователь интерфейса (ПИ) 8 и импульсный преобразователь напряжения (ПН) 9.
Магнитометры (2) измеряют проекции магнитного поля Земли по трем осям Нх, Hy, Hz. Точные акселерометры (3) измеряют проекции линейного ускорения по трем осям Gx, Gy, Gz. Акселерометры большого диапазона ускорений (4) измеряют проекции линейного ускорения по трем осям Vx, Vy, Vz. Датчик температуры (5) измеряет текущую температуру Т. Аналоговые сигналы с магнитометров, акселерометров и датчика температуры поступают на аналого-цифровой преобразователь АЦП (6), где преобразуются в цифровой код для цифрового сигнального процессора ЦСП (7). Цифровой сигнальный процессор усредняет накопленные измерения по каждой координате акселерометров и магнитометров. Далее цифровой сигнальный процессор проводит температурную и геометрическую коррекцию компонентов акселерометров и магнитометров. После коррекции компонентов осуществляется расчет зенитного и визирного углов и азимута по известной методике (см., например, Исаченко В.Х. Инклинометрия скважин. М.: Недра, 1987). В режимах «динамика» и «перегрузка» рассчитанные зенитный угол, визирный угол и азимут передаются скважинному прибору по интерфейсу CAN, RS-232 либо RS-485 в зависимости от модификации скважинного прибора посредством преобразователя интерфейса ПИ (8). Питание всех блоков инклинометра осуществляется импульсным преобразователем напряжения ПН (9).
Точность и температурная стабильность измерений углов достигается при помощи калибровки датчика на предприятии изготовителе, введением поправочных коэффициентов в память инклинометра.
Сущность предлагаемого изобретения заключается в том, что, не зависимо от режима бурения, осуществляется считывание данных посредством аналого-цифрового преобразователя со всех датчиков: трех «точных» акселерометров Gx, Gy, Gz (например, диапазона ±2G, ±4G), трех «грубых» акселерометров Vx, Vy, Vz (например, диапазона ±12G, ±30G), трех магнитометров Нх, Hy, Hz и датчика температуры Т и в зависимости от величины разности любого текущего измерения от вычисленного промежуточного среднего значения текущее измерение «точных» акселерометров Gxi, Gyi, Gzi либо принимается, либо заменяется значением «грубых» акселерометров Vxi, Vyi, Vzi перед усреднением.
Способ повышения виброустойчивости измерений инклинометра осуществляется следующим образом:
1. ЦСП 7 последовательно с периодом опроса 1 мс считывает с помощью АЦП 6 данные с датчиков 2, 3, 4 (Нх, Hy, Hz, Gx, Gy, Gz, Vx, Vy и Vz) в течение 4 с. В итоге получаем девять массивов накопленных измерений: Gx[4096], Gy[4096], Gz[4096], Vx[4096], Vy[4096], Vz[4096], Hx[4096], Hy[4096], Hz[4096].
2. ЦСП считывает текущую температуру T с датчика 5.
3. ЦСП вычисляет: промежуточные средние значения Gxcp, Gycp, Gzcp, Vxcp, Vycp, Vzcp, максимальные и минимальные значения Gxмax, Gxmin, Gyмax, Gymin, Gzмax, Gzmin.
4. ЦСП сравнивает разности (Gxмax-Gxcp), (Gxcp-Gxmin), (Gyмax-Gycp), (Gycp-Gymin), (Gzмax-Gzcp), (Gzcp-Gzmin) с порогом «дрожания» измерений, который характеризуется верхним порогом отклонения максимального или минимального значения от среднего.
5. Если каждая из разниц меньше порога «дрожания», значит в текущий момент нет бурения (например, при наращивании буровой колонны) и инклинометр переключается в режим «статика». В этом режиме процессор запоминает это и еще два измерения с промежутком 10 секунд, вычисляет инклинометрические углы, записывает их в память с пометкой «СТ1», «СТ2», «СТ3» для последующей передачи в скважинный прибор при возобновлении бурения.
6. Если любая из разниц больше порога «дрожания», значит, в текущий момент нельзя замерять статику и процессор сравнивает каждое измеренное значение с акселерометров Gxi, Gyi, Gzi [i=0…4095] с заданным в установках пороговым значением «перегрузка» (для акселерометров это значение равно 95% от максимального рабочего диапазона). Например: для акселерометров диапазона ±4G пороговое значение равно 3,8G. Если величина модуля текущего i измерения меньше порогового значения «перегрузка», значит идет бурение и инклинометр переключается в режим «динамика».
7. Если величина модуля текущего i измерения по любой координате больше или равна пороговому значению, то процессор переключается в режим «перегрузка». В этом режиме все i измерения по всем трем координатам Gxi, Gyi, Gzi заменяются на i измерения Vxi, Vyi, Vzi.
8. После того как ЦСП определил текущий режим измерения и произвел заполнение массивов, во всех режимах производится усреднение накопленных измерений по каждой координате акселерометров.
9. ЦСП проводит усреднение по каждой координате магнитометров Нхср, Hycp, Hzcp из массивов Нх[4096], Hy[4096], Hz[4096].
10. Далее работа инклинометра продолжается в штатном режиме согласно описанию структурной схемы инклинометра.
Такой способ измерения, накопления и вычисления текущих проекций акселерометров позволяет в условиях вибрации достигать высокой точности за счет частичной замены измерений, вышедших за пределы диапазона измерения «точного» акселерометра, на показания «грубого» акселерометра, причем, чем ниже вибрация, тем меньше «грубых» измерений присутствуют в массиве для последующего усреднения и точность приближается к точности режима «статика» при отсутствии вибрации.
Предлагаемое изобретение позволяет повысить виброустойчивость и создать недорогой инклинометр с хорошей точностью измерений при воздействии вибрации во время бурения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ МАГНИТНОГО КУРСА ПОДВИЖНОГО ОБЪЕКТА | 2016 |
|
RU2629539C1 |
| СИСТЕМА ОТСЛЕЖИВАНИЯ ДЕНТАЛЬНОГО ПОЛОЖЕНИЯ ДЛЯ ЗУБНОЙ ЩЕТКИ | 2009 |
|
RU2496446C2 |
| СПОСОБ ПОЛЕВОЙ КАЛИБРОВКИ МАГНИТНОГО КОМПАСА | 2018 |
|
RU2674535C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОМПЛЕКСА УГЛОВЫХ ПАРАМЕТРОВ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ БУРОВОГО ИНСТРУМЕНТА | 2015 |
|
RU2610957C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАГНИТНОГО АЗИМУТА В СКВАЖИННОМ ИНКЛИНОМЕТРЕ В ПРОЦЕССЕ БУРЕНИЯ | 2014 |
|
RU2586341C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ПОДВИЖНОГО ОБЪЕКТА | 2014 |
|
RU2555496C1 |
| СКВАЖИННЫЙ ТРЕХКОМПОНЕНТНЫЙ ЦИФРОВОЙ АКСЕЛЕРОМЕТР | 2012 |
|
RU2488849C1 |
| ИНКЛИНОМЕТР | 1998 |
|
RU2172828C2 |
| Малогабаритная адаптивная курсовертикаль | 2016 |
|
RU2714144C2 |
| ИНКЛИНОМЕТР | 2006 |
|
RU2348008C2 |
Изобретение относится к области измерительной техники и может быть использовано в нефтепромысловой геофизике для контроля пространственного положения траектории ствола скважин в процессе их строительства. Техническим результатом является виброустойчивость измерений при воздействии вибраций на инклинометр во время бурения скважины. Способ повышения виброустойчивости инклинометра заключается в том, что цифровой сигнальный процессор последовательно с заданным периодом опроса считывает с помощью аналого-цифрового преобразователя данные с трех магнитометрических и шести акселерометрических датчиков, образуя девять массивов накопленных измерений: Gx[0…N-1], Gy[0…N-1], Gz[0…N-1], Vx[0…N-1], Vy[0…N-1], Vz[0…N-1], Hx[0…N-1], Hy[0…N-1], Hz[0…N-1], также считывается текущая температура с датчика температуры. Затем цифровой сигнальный процессор вычисляет промежуточные средние значения Gxcp, Gycp, Gzcp, Vxcp, Vycp, Vzcp, максимальные и минимальные значения Gxмax, Gxmin, Gyмax, Gymin, Gzмax, Gzmin, и сравнивает разности (GxMax-Gxcp), (Gxcp-Gxmin), (Gyмax-Gycp), (Gycp-Gymin), (Gzмax-Gzcp), (Gzcp-Gzmin) с порогом «дрожания» измерений, который характеризуется верхним порогом отклонения максимального или минимального значения от среднего. При этом, если каждая из разностей меньше порога «дрожания», инклинометр переключается в режим «статика», в этом режиме процессор запоминает данное и еще два измерения с заданным промежутком, вычисляет инклинометрические углы, записывает их в память с пометкой «СТ1», «СТ2», «СТ3» для последующей передачи в скважинный прибор при возобновлении бурения. В случае, если любая из разностей больше порога «дрожания», то процессор сравнивает каждое измеренное значение с акселерометров Gxi, Gyi, Gzi [i=0…N-1] с заданным в установках пороговым значением «перегрузка». Причем, если величина модуля текущего i измерения меньше порогового значения «перегрузка», инклинометр переключается в режим «динамика», а если величина модуля текущего i измерения по любой координате больше или равна пороговому значению, то процессор переключается в режим «перегрузка». В режиме «перегрузка» все i измерения по всем трем координатам Gxi, Gyi, Gzi заменяются на i измерения Vxi, Vyi, Vzi. Причем, после того как процессор определил текущий режим измерения и произвел заполнение массивов, во всех режимах производится усреднение накопленных измерений по каждой координате акселерометров. Кроме того, процессор проводит усреднение по каждой координате магнитометров Нхср, Нyср, Hzcp из массивов Hx[0…N-1], Hy[0…N-1], Hz[0…N-1], после чего работа инклинометра продолжается в штатном режиме. 1 ил.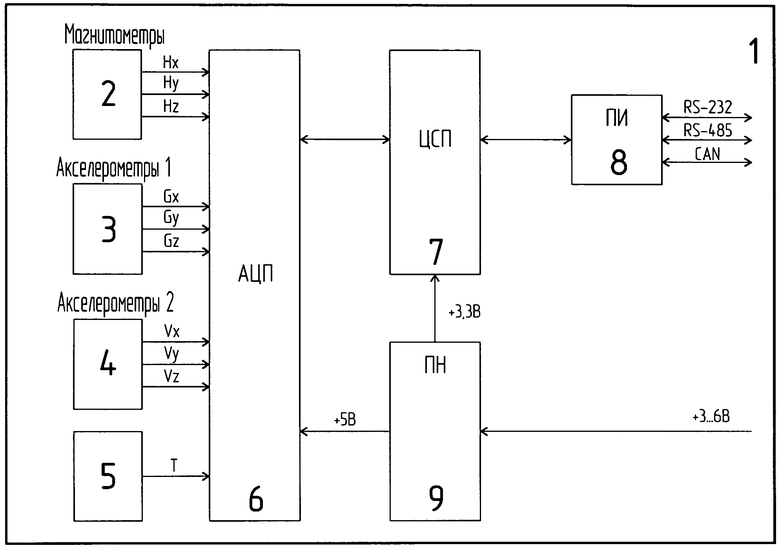
Способ повышения виброустойчивости инклинометра, состоящего из трех ортогональных магнитометрических датчиков, трех стабильных и точных ортогональных акселерометрических датчиков, трех акселерометрических датчиков большого диапазона ускорений, датчика температуры, аналого-цифрового преобразователя, цифрового сигнального процессора, преобразователя интерфейса и импульсного преобразователя напряжения, заключающийся в том, что цифровой сигнальный процессор последовательно с заданным периодом опроса считывает с помощью аналого-цифрового преобразователя данные с трех магнитометрических и шести акселерометрических датчиков, образуя девять массивов накопленных измерений: Gx[0…N-1], Gy[0…N-1], Gz[0…N-1], Vx[0…N-1], Vy[0…N-1], Vz[0…N-1], Hx[0…N-1], Hy[0…N-1], Hz[0…N-1], также считывается текущая температура с датчика температуры, затем цифровой сигнальный процессор вычисляет промежуточные средние значения Gxcp, Gycp, Gzcp, Vxcp, Vycp, Vzcp, максимальные и минимальные значения Gxмax, Gxmin, Gyмax, Gymin, Gzмax, Gzmin, затем сравнивает разности (GxMax-Gxcp), (Gxcp-Gxmin), (Gyмax-Gycp), (Gycp-Gymin), (Gzмax-Gzcp), (Gzcp-Gzmin) с порогом «дрожания» измерений, который характеризуется верхним порогом отклонения максимального или минимального значения от среднего и, если каждая из разностей меньше порога «дрожания», инклинометр переключается в режим «статика», в этом режиме процессор запоминает данное и еще два измерения с заданным промежутком, вычисляет инклинометрические углы, записывает их в память с пометкой «СТ1», «СТ2», «СТ3» для последующей передачи в скважинный прибор при возобновлении бурения, а если любая из разностей больше порога «дрожания», в этом случае процессор сравнивает каждое измеренное значение с акселерометров Gxi, Gyi, Gzi [i=0…N-1] с заданным в установках пороговым значением «перегрузка» и если величина модуля текущего i измерения меньше порогового значения «перегрузка», инклинометр переключается в режим «динамика», а если величина модуля текущего i измерения по любой координате больше или равна пороговому значению, то процессор переключается в режим «перегрузка», в этом режиме все i измерения по всем трем координатам Gxi, Gyi, Gzi заменяются на i измерение Vxi, Vyi, Vzi, причем, после того как процессор определил текущий режим измерения и произвел заполнение массивов, во всех режимах производится усреднение накопленных измерений по каждой координате акселерометров, а также процессор проводит усреднение по каждой координате магнитометров Нхср, Нyср, Hzcp из массивов Hx[0…N-1], Hy[0…N-1], Hz[0…N-1], после чего работа инклинометра продолжается в штатном режиме.
| ИНКЛИНОМЕТР | 2006 |
|
RU2348008C2 |
| СПОСОБ ИЗМЕРЕНИЯ ЗЕНИТНЫХ И АЗИМУТАЛЬНЫХ УГЛОВ | 2002 |
|
RU2231638C1 |
| ИНКЛИНОМЕТР | 1995 |
|
RU2105952C1 |
| Феррозондовый инклинометр | 1979 |
|
SU855200A1 |
| СПОСОБ ИЗМЕРЕНИЯ ОРИЕНТАЦИИ СТВОЛА СКВАЖИНЫ В ПРОЦЕССЕ БУРЕНИЯ И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2001 |
|
RU2204017C2 |
| US 6633816 B2, 14.10.2003 | |||
| US 6438495 B1, 20.08.2002 | |||

