Изобретение относится к буровой технике, в частности к средствам контроля забойных параметров при бурении и геофизических исследованиях скважин.
Известен способ определения направления скважины во время бурения [1] с помощью трех жестко закрепленных магниточувствительных датчиков и трех акселерометров, путем измерения ими проекций магнитного и гравитационного поля Земли и расчета по ним азимута, зенитного угла и угла поворота скважинного прибора.
Описанный выше способ позволяет производить измерения непосредственно в составе буровой колонны, однако для его реализации требуются акселерометры с очень высокими техническими характеристиками, в частности с высоким диапазоном перегрузок по вибрациям, т.к. спектр частот вибрации при турбинном бурении составляет (5...300 Гц) [2] и величина ускорения при этом превышает 50 g.
С целью снижения дополнительной ошибки от вибрации применяют демпфирование чувствительного элемента акселерометра (для снижения собственной частоты) до 0,25...0,5 Гц путем помещения чувствительного элемента в жидкость с высокой плотностью [2]. При таком методе значительно увеличивается температурная погрешность акселерометра, т.к. физические свойства жидкости под действием температуры изменяются.
Известна конструкция устройства [2], применяемая в телесистеме "Пилот-П", в которой используются датчики в виде трехкомпонентных одноосных феррозондовых магнитометров и трех акселерометров, жестко закрепленных в корпусе скважинного прибора. Акселерометры имеют широкий динамический диапазон по вибрациям (10-5g...50 g), но применение указанных датчиков в конструкции сильно удорожает прибор.
Для устранения ошибки акселерометров при вибрации предусмотрена фильтрация с частотой 0,5...1 Гц [2], что приводит к увеличению времени реакции скважинного прибора на изменение угла отклонителя, а это, в свою очередь, приводит к трудностям при ориентировании бурового инструмента на забое.
Задачей изобретения является расширение рабочего диапазона по вибрациям скважинного прибора при минимальном времени реакции на изменение угла отклонителя и снижение стоимости прибора.
Поставленная задача решается тем, что в способе измерения ориентации ствола скважины в процессе бурения используют феррозондовые магнитометры и акселерометры, настроенные на диапазон вибраций 10-5 g...2 g, а также дополнительные акселерометры, настроенные на диапазон вибраций 10-2g...90 g, при этом дополнительные акселерометры в состоянии покоя настраивают по основным, а устройство для осуществления способа, содержащее блоки жестко закрепленных магнитометров, акселерометров, блок преобразования и связи с ЭВМ, снабжен двумя акселерометрами, оси чувствительности которых расположены в плоскости, перпендикулярной оси устройства, и настроенные на диапазон вибраций 10-2 g.. .90 g.
Способ осуществляют следующим образом. В состоянии покоя, когда насосы выключены, производится поправка нуля показаний грубых, дополнительно введенных акселерометров по точным, за последующее время бурения (обычно не более нескольких часов до очередного выключения насосов нули показаний грубых акселерометров остаются в приемлемых пределах). При снятии точных замеров используются точные акселерометры с одновременным выключением насосов.
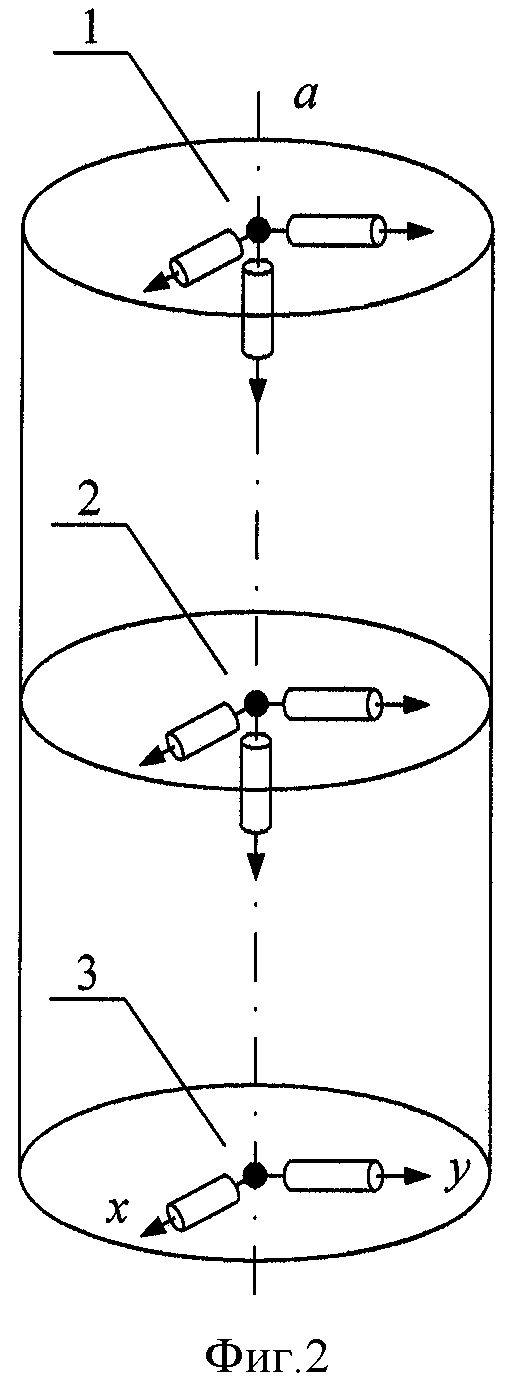
На фиг.1 и 2 дано схематичное изображение прибора и расположение блоков датчиков относительно корпуса прибора для осуществления способа.
Прибор состоит из блока 1 магнитометров, блока 2 из 3-х точных акселерометров, блока 3 из 2-х дополнительных акселерометров, работающих в широкой полосе частот вибраций. Все перечисленные блоки соединены с блоком 4 преобразования и связи с наземной ЭВМ 5. Оси чувствительности х, у дополнительных акселерометров 3 перпендикулярны оси а прибора (см. фиг.2).
Устройство работает следующим образом. Показания акселерометров (блок 1 и блок 2) - это проекции гравитационного поля Земли, преобразуются в блоке 4 в цифровую форму и отправляются в ЭВМ. Показания феррозондов блока 3 - это проекции магнитного поля Земли, также преобразуются в цифровую форму и поступают в ЭВМ. При этом сигнал с точных акселерометров (блок 1) с диапазоном по вибрациям 10-5 g...2 g отфильтровывается с частотой 0,2 Гц, а сигнал с дополнительно введенных, грубых акселерометров (блок 2) с диапазоном по вибрациям 10-2 g...90 g, отфильтровывается с частотой до 10 Гц, что позволяет получить время реакции системы на изменение угла отклонителя менее 0,2 сек, что на порядок больше, чем у прототипа. В ЭВМ по показаниям акселерометров и феррозондов рассчитываются зенитный угол, угол отклонителя и азимут.
Таким образом, описанные выше способ измерения и устройство для его осуществления позволяют значительно расширить базовый диапазон скважинного прибора по вибрациям, при этом исключаются затраты на приобретение дорогостоящих акселерометров.
Источники информации
1. Исаченко В.Х. Инклинометрия скважин. М.: Недра, 1987 г., с. 46.
2. Ковшов Г.Н., Алимбеков Р.И., Жибер А.В. Инклинометры. (Основы теории и прекирования). Уфа, Гилем, 1998 г., с. 214, 316 - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ КОМПЛЕКСА УГЛОВЫХ ПАРАМЕТРОВ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ БУРОВОГО ИНСТРУМЕНТА | 2015 |
|
RU2610957C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ ИСКРИВЛЕНИЯ СКВАЖИНЫ | 2000 |
|
RU2166084C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ СКВАЖИНЫ | 2014 |
|
RU2567064C1 |
| ТЕЛЕМЕТРИЧЕСКАЯ СИСТЕМА КОНТРОЛЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ ТРАЕКТОРИИ СТВОЛА СКВАЖИНЫ | 1997 |
|
RU2110684C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ТРАЕКТОРИИ СКВАЖИНЫ | 2001 |
|
RU2206737C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОЛОЖЕНИЯ СТВОЛА ГОРИЗОНТАЛЬНОЙ СКВАЖИНЫ | 2012 |
|
RU2490448C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ НАПРАВЛЕНИЯ СКВАЖИНЫ | 2001 |
|
RU2198291C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ ИСКРИВЛЕНИЯ СКВАЖИНЫ И ПОЛОЖЕНИЯ ОТКЛОНИТЕЛЯ ПРИ БУРЕНИИ | 2001 |
|
RU2184845C1 |
| ИНКЛИНОМЕТР | 2006 |
|
RU2348008C2 |
| СПОСОБ ИЗМЕРЕНИЯ МАГНИТНОГО АЗИМУТА В СКВАЖИННОМ ИНКЛИНОМЕТРЕ (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ИХ ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2290673C2 |
Изобретение относится к буровой технике, в частности к средствам контроля забойных параметров при бурении и геофизических исследованиях скважин. Техническим результатом изобретения является расширение базового диапазона скважинного прибора по вибрациям и снижение его стоимости. Для этого в способе используют феррозондовые магнитометры, основные акселерометры, настроенные на диапазон вибраций 10-5 ... 2 g, и дополнительные акселерометры, настроенные на диапазон вибраций 10-2 ... 90 g. При этом вторые акселерометры в состоянии покоя настраивают по первым. Устройство для осуществления способа содержит блоки жестко закрепленных магнитометров 1, основных акселерометров 2, дополнительных акселерометров 3, оси чувствительности х, у которых расположены в плоскости, перпендикулярной оси прибора и блока преобразования и связи 4 с ЭВМ 5. 2 с. и 1 з.п. ф-лы, 2 ил.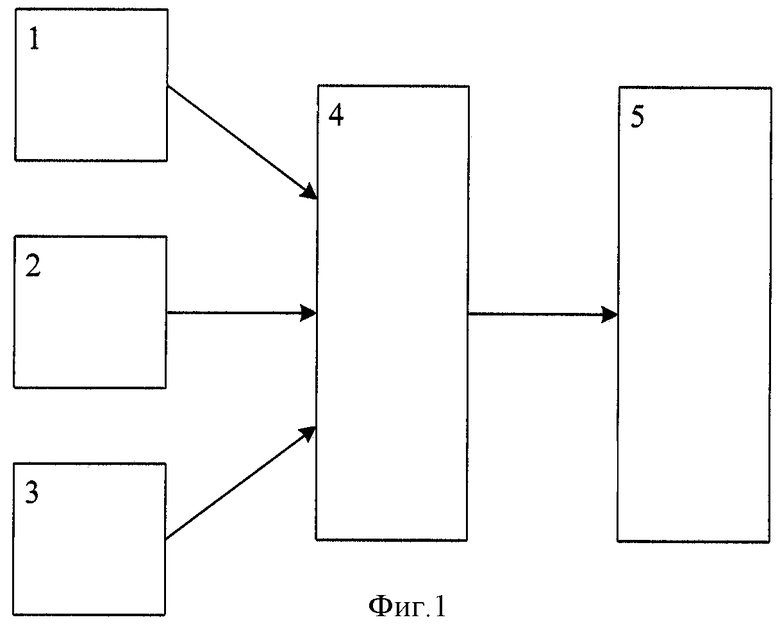
| КОВШОВ Г.Н | |||
| и др | |||
| Инклинометры (Основы теории и проектирования) | |||
| - Уфа, ГИЛЕМ, 1998, с.214 и 316 | |||
| Способ определения азимута искривления траектории скважины | 1988 |
|
SU1555470A1 |
| СИСТЕМА ДЛЯ ОРИЕНТАЦИИ УСТРОЙСТВ НАПРАВЛЕННОГО БУРЕНИЯ ГОРИЗОНТАЛЬНЫХ И СИЛЬНОНАКЛОНЕННЫХ СКВАЖИН | 1991 |
|
RU2015316C1 |
| ГИРОИНКЛИНОМЕТР | 1994 |
|
RU2078204C1 |
| БЕСКАРДАННЫЙ ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР И СПОСОБ ВЫРАБОТКИ ИНКЛИНОМЕТРИЧЕСКИХ УГЛОВ | 1994 |
|
RU2101487C1 |
| ИНКЛИНОМЕТР | 1995 |
|
RU2105952C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ ИСКРИВЛЕНИЯ СКВАЖИНЫ | 2000 |
|
RU2166084C1 |
| US 4844923 А, 23.01.1990 | |||
| ПРОЗРАЧНАЯ И ГИБКАЯ КОМПОЗИЦИЯ ПРОПИЛЕНОВЫХ ПОЛИМЕРОВ И ИЗДЕЛИЕ, ПОЛУЧЕННОЕ ИЗ НЕЕ | 2002 |
|
RU2296772C2 |
| СПОСОБ ЛАЗЕРНОГО ОБЛУЧЕНИЯ ВНУТРЕННЕЙ ПОВЕРХНОСТИ ПОЛОСТИ БИОТКАНИ | 2011 |
|
RU2492882C2 |
| Бесколесный шариковый ход для железнодорожных вагонов | 1917 |
|
SU97A1 |
| МАССООБМЕННЫЙ РОТАЦИОННЫЙ АППАРАТ | 0 |
|
SU199830A1 |
| ИСАЧЕНКО В.Х | |||
| Инклинометрия скважин | |||
| - М.: Недра, 1987, с.46. | |||

