Изобретение относится к области геодезии, а именно к устройствам для определения ориентации ствола скважины.
Известны инклинометры, использующие датчики наклона (маятники, уровни, акселерометры) для определения зенитного угла скважины и датчики магнитного поля для определения азимута [1] Недостатком этих инклинометров является то, что они не могут работать в скважине, заключенной в стальную обсадную трубу (экранируется магнитное поле). Затруднительно их использовать и в составе бурильной колонны, из-за значительного искажения магнитного поля стальными массами.
Известны инклинометры, в которых азимут передается с поверхности Земли в скважину посредством гироскопов. Можно отметить два недостатка таких инклинометров. Во-первых, из-за дрейфа гироскопов время, в течение которого они "держат" азимут, ограничивается десятками минут. Во-вторых, работающие гироскопы очень чувствительны к ударам и вибрациям, и азимут часто "теряется" уже при опускании прибора в скважину, что заставляет поднимать прибор на поверхность и все начинать сначала. Как первое, так и второе делают невозможным применение этих инклинометров во время бурения.
Известен инклинометр, выбранный нами за прототип, который содержит акселерометры для определения наклонов и точные гироскопы, способные самостоятельно определять направление на север в процессе выставки [1]
Недостатком прототипа является наличие точных гироскопов. Это приводит к большим диаметрам измерительной части (63,5 мм для прототипа), высокой стоимости, большой чувствительности к ударам и вибрациям.
Целью изобретения является уменьшение диаметра измерительной части, повышение вибро- и ударостойкости, уменьшение стоимости.
Эта цель достигается тем, что в инклинометр, содержащий акселерометры, устанавливается каретка с направляющими, подключенная к механизму возвратно-поступательного движения, а акселерометры устанавливаются на каретке.
На чертеже изображена схема инклинометра. Он содержит направляющие 1, по которым может перемещаться каретка 2, приводимая в движение возвратно-поступательным механизмом 3. На каретке установлены акселерометры 4, сигналы с которых поступают в блок обработки информации 5.
Рассмотрим работу инклинометра в случае, когда движение каретки осуществляется по синусоидальному закону. После опускания инклинометра в нужную точку скважины в течение времени t1 при неработающем механизме возвратно-поступательных движений и неподвижной каретке снимаются и вводятся в блок обработки показания акселерометров. Эти показания постоянны и равны проекциям ускорения силы тяжести на оси чувствительности акселерометров. Затем включается механизм возвратно-поступательных движений, и каретка с акселерометрами приводится в колебательные движения. В течение времени t2 вновь снимаются и вводятся в блок обработки показания акселерометров. Эти показания, кроме постоянной части, содержат уже и переменные составляющие, вызванные действием ускорений разгона торможения и ускорением Кориолиса.
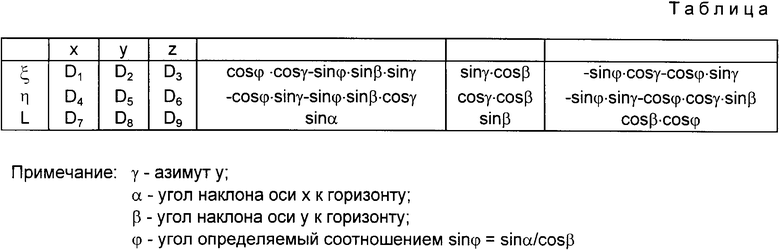
Рассмотрим алгоритм обработки информации. При этом для упрощения выкладок будем полагать, что акселерометров три, их оси чувствительности взаимно ортогональны, ось чувствительности одного из акселерометров направлена вдоль направляющих. Свяжем с направляющими систему координат x, y, z, причем ось y направим вдоль направляющих. Введем систему координат ξ, η, L, связанную с Землей (восток-север-вертикаль). Нам необходимо по снятым показаниям акселерометров вычислить параметры ориентации, устанавливающие связь систем x, y, z и ξ, η, L.
Связь введенных выше систем можно задать матрицей D направляющих косинусов, приведенной в таблице (см. Ишлинский А.Ю. Ориентация, гироскопы и инерциальная навигация, М. Наука, 1976).
Сигналы акселерометров при движущейся со скоростью V каретке определяются соотношениями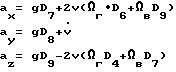
где
Ωг, Ωв горизонтальная и вертикальная составляющие скорости вращения Земли;
g ускорение силы тяжести.
Элементы матрицы D7, D8, D9 определяются по интегральным показаниям акселерометров, снятых в статике в течение времени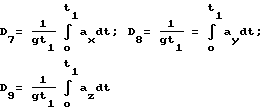
Элементы D4, D6 вычисляем по показаниям акселерометров, снятым в динамике в течение времени t2. При этом для подавления шумов целесообразно воспользоваться методом синхронного детектирования. Текущую скорость v можно определить или с помощью какого-либо независимого датчика, или по показаниям акселерометра y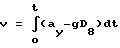
В течение времени t2 накапливаем следующие интегралы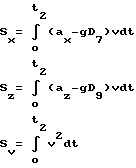
Элементы D4, D6 определяются соотношениями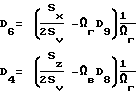
Воспользовавшись свойствами единичности и ортогональности матрицы D, можно определить и все остальные ее элементы. В частности
D2 (D4D9 D1D6) D5 - (D7D4 + D9D6)/D8
Зенитный угол β и азимут g скважины определяются соотношениями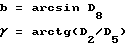
Точность определения зенитного угла в предлагаемом инклинометре не отличается от прототипа и других инклинометров, где используются акселерометры.
Оценим точность определения азимута. Эта точность может ограничиваться чувствительностью и шумами акселерометров. Чувствительность современных маятниковых акселерометров находится на уровне 10-6g-10-7g при диапазоне измерения ±10g. Чувствительность можно довести до 10-8g при сокращении диапазона до 1•g. Средняя величина ускорения Кориолиса, по которой и определяется фактически азимут, составляет 2•10-5g при амплитуде колебаний 50 см и частоте 2 Гц, что позволяет определить азимут с приемлемой погрешностью, меньшей одного градуса.
Что касается шумов, то можно полагать, что при стационарном характере движения по направляющим, например периодическом, с постоянным периодом и амплитудой, их влияние будет тоже стационарным и учитываемым.
Для практической проверки работоспособности предлагаемого устройства был осуществлен простейший эксперимент. По направляющим от оптической скамьи вручную в течение трех минут помещался взад-вперед блок из трех акселерометров. Информация с акселерометров вводилась в ЭВМ и обрабатывалась по алгоритму, описанному выше. Была получена погрешность определения азимута 6-8 мин, что всего в два раза больше требуемой для скважинной инклинометрии. Можно полагать, что реализация механизма стационарных возвратно-поступательных движений и увеличение чувствительности акселерометров позволит еще в 2-3 раза повысить точность.
Применение акселерометров для определения азимута вместо точных гироскопов позволяет прежде всего уменьшить диаметр измерительной части (до 30-36 мм) и сделать инклинометр вибро- и ударостойким. Это позволяет включить инклинометр в состав практически любой буровой колонны, причем без каких-либо специальных немагнитных вставок.
Кроме того, стоимость предлагаемого инклинометра может быть меньше стоимости инклинометра с гироскопами, поскольку точные (чувствующие Землю) гироскопы являются очень сложными и дорогими приборами.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ | 2003 |
|
RU2250993C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗЕНИТНОГО УГЛА И АЗИМУТА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 2012 |
|
RU2507392C1 |
| Способ определения зенитного угла и азимута скважины и гироскопический инклинометр | 2018 |
|
RU2682087C1 |
| ГИРОИНКЛИНОМЕТР | 1994 |
|
RU2078204C1 |
| ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР И СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ СКВАЖИН | 1996 |
|
RU2104490C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ ИСКРИВЛЕНИЯ СКВАЖИНЫ | 2012 |
|
RU2503810C1 |
| КОМПЛЕКС ИНКЛИНОМЕТРИЧЕСКОЙ СКВАЖИННОЙ АППАРАТУРЫ И СПОСОБ ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ СКВАЖИН | 2000 |
|
RU2193654C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1996 |
|
RU2100594C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ СКВАЖИН ГИРОСКОПИЧЕСКИМ ИНКЛИНОМЕТРОМ | 2008 |
|
RU2387828C1 |
| ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР И СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ СКВАЖИН | 2005 |
|
RU2282717C1 |
Изобретение относится к устройствам для определения ориентации ствола скважины. Сущность изобретения: для измерения зенитного угла азимута применяются только акселерометры, для определения азимута акселерометры приводятся в колебательное движение и азимут определяется по ведичине возникшего при этом Кориолисова ускорения. Инклинометр содержит направляющие, по которым передвигается каретка, подключенная к механизму возвратно-поступательных движений. Акселерометры установлены на каретке и их выходы подключены к блоку обработки информации. Для возможности точной обработки сигнала акселерометра и вычисления азимута в инклинометр введен датчик текущей скорости каретки, который может быть выполнен как интегратор показаний акселерометра, ось чувствительности которого направлена вдоль направляющих. 2 з.п. ф-лы, 1 табл. 1 ил.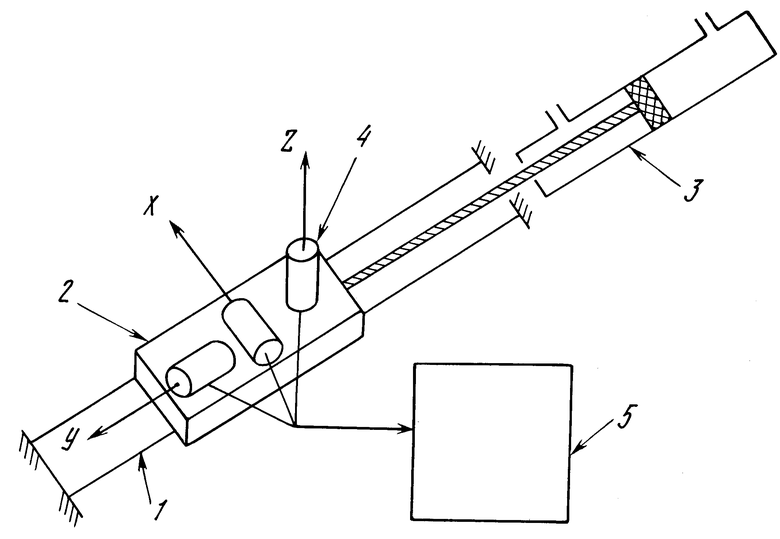
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Исаченко В.Х., Инклинометрия скважин, м., Недра, 1987, с | |||
| Способ изготовления звездочек для французской бороны-катка | 1922 |
|
SU46A1 |
