Изобретение относится к измерительной технике, а именно к оптическим способам измерения параметров вибраций, и может быть использовано для контроля работоспособности узлов и модулей радиоэлектронной аппаратуры.
Известен способ измерения параметров вибраций (патент 2097710 РФ, МПК G01H 1/08. Способ исследования колебаний. / Усанов Д.А., Скрипаль А.В., Вагарин В.А. - №94029365/28; заявл. 05.08.1994; опубл. 27.11.1997), заключающийся в том, что на вибрирующий объект направляют лазерное излучение и принимают отраженный сигнал. Зондирующий и отраженный сигналы суммируют, полученный результирующий световой сигнал преобразуют в электрический и регистрируют спектр этого сигнала. По полученному спектру сигнала судят об амплитудах вибраций объекта. К недостаткам этого способа следует отнести сложность, громоздкость и высокую стоимость оборудования, большое энергопотребление, высокие требования к качеству поверхности исследуемого объекта, высокие требования к состоянию атмосферы (определенная влажность, отсутствие запыленности и т.п.), кроме того, не определяется направление вибрации.
Известен способ измерения параметров вибраций (патент 2061242 РФ, МПК G01P 15/08, G01H 1/00. Трехкомпонентный пьезоэлектрический виброакселерометр с одним чувствительным элементом / Кобяков И.Б. - №94019569/28; заявл. 27.05.1994; опубл. 27.05.1996), заключающийся в том, что на вибрирующем объекте устанавливается пьезоэлектрический трехкомпонентный датчик виброускорений, содержащий один чувствительный элемент. К недостаткам этого способа следует отнести то, что контактный пьезочувствительный вибродатчик является источником погрешности измерений, если его масса и габариты сравнимы с соответствующими показателями вибрирующего объекта. Если, например, требуется измерить амплитуды и направления вибраций узла радиоэлектронной аппаратуры, смонтированного на печатной плате, то погрешность, вносимая изделиями пьезокерамики в форме прямоугольных параллелепипедов с квадратным основанием около 10 мм и высотой, сравнимой с размерами основания, будет весьма существенной. К тому же, в узлах печатного монтажа, как правило, требуется измерять вибрации одновременно во многих точках этих узлов. Установка большого числа вибродатчиков с громоздким навесным монтажом может увеличить вносимую погрешность до неприемлемых величин.
Наиболее близким по технической сущности является способ измерения параметров вибраций (патент 2395792 РФ, МПК G01H 9/00. Способ измерения параметров вибрации объекта / Пронин С.П., Зрюмов Е.А., Юденков А.В. - №2009125845/28; заявл. 06.07.2009; опубл. 27.07.2010), заключающийся в том, что на вибрирующем объекте закрепляют трафарет с нанесенными на него группами параллельных штрихов различной ширины, имеющих общую ось симметрии, с расстоянием между штрихами в группе, равным удвоенной ширине штриха. С помощью видеокамеры формируют на экране монитора компьютера изображение трафарета с вибрационным размытием и фиксацией соответствующей частоты кадровой развертки видеокамеры, равной частоте вибрации объекта. После этого регистрируют в неподвижном изображении трафарета нулевой контраст в группе наиболее широких штрихов. По ширине штриха в этой группе судят о размахе вибрации объекта. К недостаткам этого способа следует отнести то, что измерения возможны только в том случае, если направление вибрации перпендикулярно оси симметрии штрихов. Если это условие не выполняется, то нулевой контраст в группе штрихов не несет информации о размахе вибрации. Количество групп штрихов на трафарете должно быть равно требуемому коэффициенту перекрытия по динамическому диапазону вибраций. Поэтому с повышением требований к точности измерений усложняется трафарет, растут его масса и габаритные размеры. Это, в свою очередь, снижает точность измерений.
Техническим результатом предлагаемого способа измерения вибраций является расширение возможностей измерения параметров вибраций исследуемого объекта за счет бесконтактного трехкоординатного измерения модулей и направлений векторов амплитуды виброперемещения нескольких выбранных точек исследуемого объекта одновременно.
Предлагаемый способ измерения вибраций основывается на том, что на исследуемый объект в качестве тест-объекта наносят в требуемых местах светоотражающие метки в виде точек круглой формы, формируют бинарные растровые изображения этих меток и следов их вибрационного размытия.
При отсутствии вибраций определяют координаты центра тяжести каждой метки, ее площадь и по площади определяют ее радиус. При наличии вибраций формируют бинарное растровое изображение следа вибрационного размытия каждой метки.
Проекция вектора амплитуды виброперемещения каждой метки на направление, перпендикулярное плоскости изображения, прямо пропорциональна приращению радиуса метки вследствие ее вибрационного размытия, то есть разности между полушириной следа вибрационного размытия метки и ее радиусом, определенным при отсутствии вибраций. Направление проекции вектора амплитуды виброперемещения метки на плоскость изображения определяет угловое положение следа вибрационного размытия метки. Величина этой проекции прямо пропорциональна разности между расстоянием от центра тяжести метки до границы следа ее вибрационного размытия в направлении вибрации и полушириной этого следа.
Для определения углового положения следа вибрационного размытия каждой метки, полуширины этого следа, расстояния от центра тяжести метки до границы следа в направлении вибрации формируют фрагменты двух дополнительных матриц. Центр тяжести каждого фрагмента каждой дополнительной матрицы совмещают с центром тяжести соответствующей метки. Каждая дополнительная матрица содержит столько фрагментов, сколько меток нанесено на исследуемый объект. Каждый фрагмент первой дополнительной матрицы представляет собой область связанных элементов в форме круга, диаметр которого выбирают таким образом, чтобы весь ожидаемый след вибрационного размытия соответствующей метки находился в пределах этого фрагмента, а каждый фрагмент второй дополнительной матрицы состоит из областей связанных элементов, образующих концентрические кольца одинаковой ширины, которые примыкают друг к другу, причем внешний диаметр внешнего кольца равен диаметру соответствующего фрагмента первой дополнительной матрицы. Формируют области пересечения меток. Каждая из этих областей представляет собой область связанных элементов, одновременно принадлежащих следу вибрационного размытия соответствующей метки и соответствующему кольцу соответствующего фрагмента второй дополнительной матрицы. Подсчитывают общее количество областей пересечения каждой метки и количество областей пересечения этой метки, координаты центров тяжести которых и метки совпадают. Определяют координаты центров тяжести областей пересечения, которые не совпадают с координатами центра тяжести метки, и находят среди них тот, расстояние от которого до центра тяжести метки максимально. Это и есть центр тяжести наиболее удаленной от метки области пересечения. Полуширину следа вибрационного размытия метки определяют как произведение количества областей пересечения, координаты центров тяжести которых и метки совпадают, и ширины кольца второй дополнительной матрицы. Проекцию вектора амплитуды виброперемещения на направление, перпендикулярное плоскости изображения, определяют как разность между полушириной следа вибрационного размытия метки и ее радиусом. Направление проекции вектора амплитуды виброперемещения на плоскость изображения определяют как угол наклона отрезка прямой, соединяющей центр тяжести метки с центром тяжести наиболее удаленной от нее области пересечения, величину этой проекции определяют как разность между длиной этого отрезка и полушириной следа вибрационного размытия метки. В результате решается задача бесконтактного трехкоординатного измерения модулей и направлений векторов амплитуды виброперемещения нескольких выбранных точек исследуемого объекта одновременно.
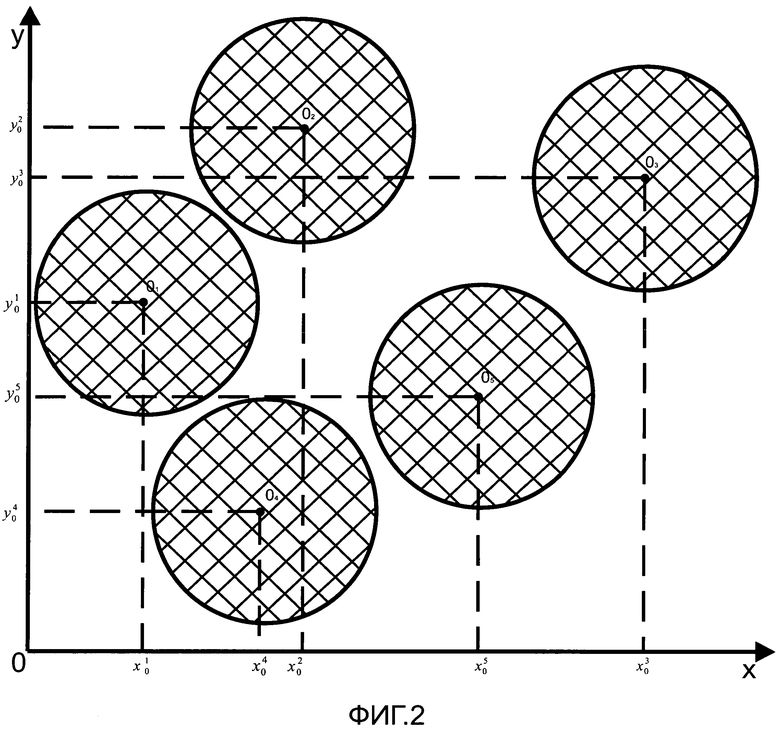
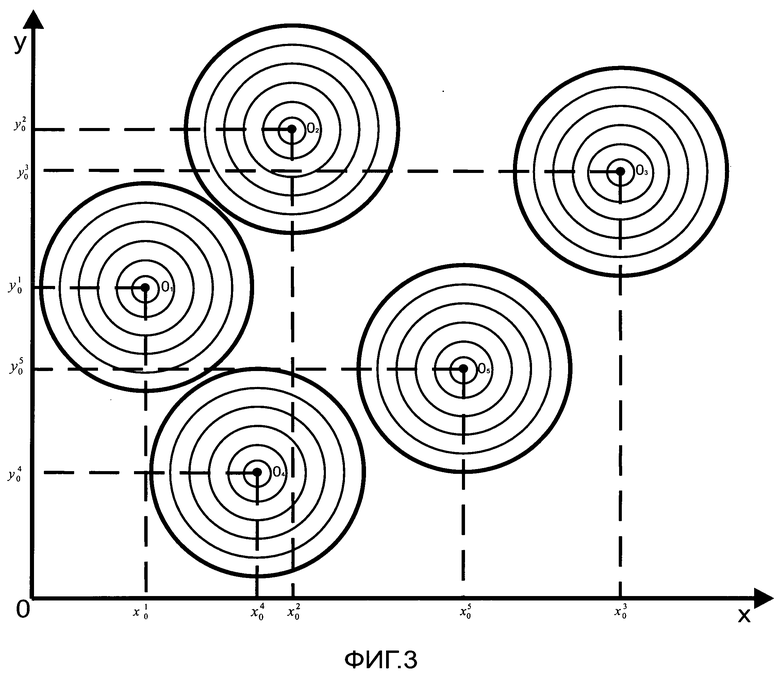
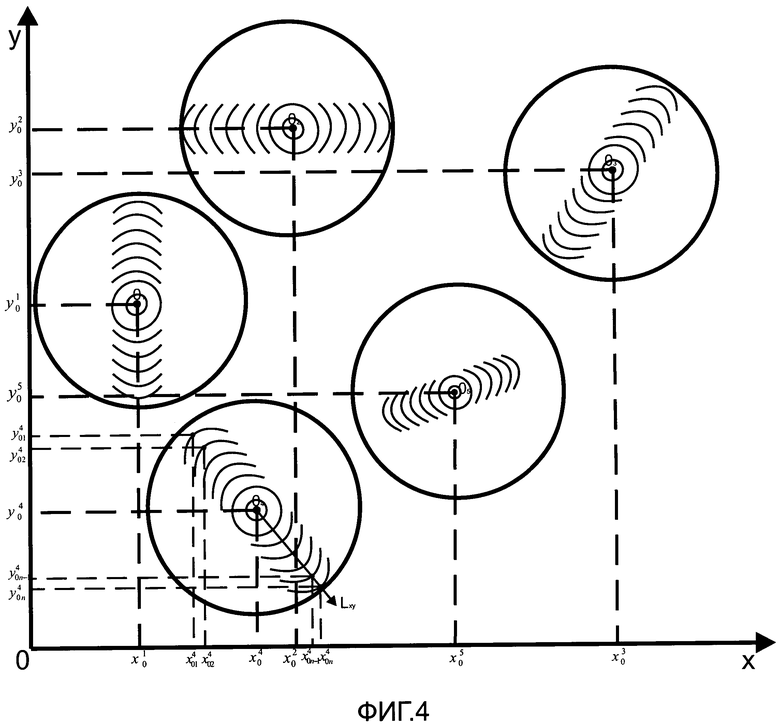
На фиг.1 представлена структура следа вибрационного размытия светоотражающей метки. На фиг.2 представлена структура первой дополнительной измерительной матрицы. На фиг.3 представлена структура второй дополнительной измерительной матрицы. На фиг.4 представлены области пересечения меток по отношению к соответствующим фрагментам первой дополнительной измерительной матрицы.
Бесконтактное трехкоординатное измерение модулей и направлений векторов амплитуды виброперемещения нескольких выбранных точек исследуемого объекта одновременно достигается за счет того, что движение любой точки исследуемого объекта описывается в трехмерной системе координат, в которой вектор движения характеризует величину и направление действия вибрации. Проекции вектора амплитуды виброперемещения на оси координат однозначно определяют модуль этого вектора и его направление в заданной системе координат.
Для регистрации вибраций выбирают несколько участков исследуемого объекта, на каждый из которых наносят светоотражающие метки круглой формы. Формируют бинарное изображение этих меток. При отсутствии вибраций по этому изображению определяют координаты центров тяжести меток, их площади и по этим площадям вычисляют радиусы меток. При наличии вибраций происходит модуляция местоположения меток в направлении действия вибраций в плоскости изображения, а также в перпендикулярном к этой плоскости направлении. В результате формируется изображение следов вибрационного размытия меток. Плоское изображение следа вибрационного размытия метки несет полную информацию о проекциях вектора амплитуды виброперемещения этой метки на координатные оси в трехмерном пространстве, то есть о величине и направлении этого вектора. Если принять, что в декартовой системе координат плоскость изображения «Х0Y», а ось Z перпендикулярна плоскости изображения, то модуль вектора амплитуды виброперемещения метки:

где k - порядковый номер метки; Аk - модуль вектора амплитуды виброперемещения k-й метки; 

Предлагаемый способ позволяет по следу вибрационного размытия метки выделить величину и направление проекции вектора амплитуды виброперемещения метки в плоскости изображения и величину проекции этого вектора на направление, перпендикулярное этой плоскости. Процесс определения составляющих вектора амплитуды виброперемещения метки по следу ее вибрационного размытия можно разделить на несколько этапов. Первым из них является формирование изображения следов вибрационного размытия меток. Из всего многообразия считывающих устройств наиболее распространены устройства телевизионного типа с применением приборов с зарядовой связью, на мишени которых величина накопленного заряда пропорциональна освещенности ячейки матрицы мишени и времени воздействия света на эту ячейку. Таким образом, уже на мишени считывающего устройства за время накопления заряда, равного примерно периоду повторения считывания кадров, формируется весь след или его часть. Вполне очевидно, что весь след при частоте вибрации менее частоты считывания кадров на мишени считывающего устройства зафиксировать невозможно. Поэтому полностью след вибрационного размытия метки, в этом случае, следует записывать в течение нескольких кадров и сохранять на время, необходимое для дальнейшей обработки в виде фрагмента матрицы следов вибрационного размытия меток, размер которой совпадает с размером матрицы считывающего устройства. Для примера: при частоте вибраций 1 Гц и при частоте кадров 50 Гц требуется накапливать заряд в течение времени более чем 1 сек, то есть в течение более чем 50 кадров. При частоте вибраций более 50 Гц требуется один кадр считывания. Матрица следов вибрационного размытия меток состоит из бинарных элементов. Поэтому уровень логической «1», соответствующий элементу следа вибрационного размытия метки, при последующем обращении к той же ячейке подтверждается и сохраняется на время последующей обработки. Структура следа вибрационного размытия метки представлена на фиг.1.
Для определения проекций векторов амплитуд виброперемещения меток на плоскость изображения Аxy и на направление, перпендикулярное этой плоскости, Az формируют две дополнительные измерительные матрицы. Центр тяжести каждого из фрагментов первой и второй дополнительной матрицы совмещают с центром тяжести соответствующей метки. В результате совмещения координаты центров тяжести первых фрагментов первой и второй дополнительных матриц совпадают с координатами центра тяжести первой метки, а координаты центров тяжести вторых фрагментов первой и второй дополнительных матриц совпадают с координатами центра тяжести второй метки и так далее. Каждый фрагмент первой дополнительной матрицы представляет собой область связанных элементов в форме круга, диаметр которого выбирают таким образом, чтобы весь след вибрационного размытия соответствующей метки находился в пределах этого фрагмента (фиг.2). Каждый фрагмент второй дополнительной матрицы состоит из примыкающих друг к другу областей связанных элементов, образующих концентрические кольца одинаковой ширины, причем внешний диаметр внешнего кольца равен диаметру соответствующего фрагмента первой дополнительной матрицы (фиг.3).
При наличии вибраций формируют области пересечения каждой метки. Каждая из областей пересечения метки представляет собой область связанных элементов, одновременно принадлежащих следу вибрационного размытия этой метки и соответствующему кольцу соответствующего фрагмента второй дополнительной матрицы (фиг.4). Для каждой метки определяют координаты центров тяжести областей пересечения этой метки, подсчитывают общее количество ее областей пересечения и количество областей пересечения метки, координаты центров тяжести которых и метки совпадают.
Среди областей пересечения метки, координаты центров тяжести которых и метки не совпадают, находят ту область пересечения метки, расстояние от центра тяжести которой до центра тяжести соответствующей метки максимально. Эту область пересечения метки фиксируют как наиболее удаленную от метки ее области пересечения.
Для каждой k-и метки определяют направление проекции вектора амплитуды ее виброперемещения как угол наклона отрезка прямой, соединяющего центр тяжести этой метки с центром тяжести наиболее удаленной от нее ее области пересечения, по отношению к системе координат «Х0Y» φk:

где 



Для каждой k-й метки определяют расстояние от центра тяжести этой метки до центра тяжести наиболее удаленной от нее ее области пересечения 

где 

Полуширину следа вибрационного размытия метки δk определяют по формуле

где mk - количество областей пересечения k-й метки, координаты центров тяжести которых совпадают с координатами центра тяжести этой метки; Δh - ширина кольца второй дополнительной матрицы.
Вычисляют разность 


Вычисляют разность 

Вычисляют величину проекции вектора амплитуды виброперемещения k-й метки на плоскость изображения 

где γk - масштабный коэффициент, связанный со свойствами оптической системы для k-й метки.
Абсциссу вектора амплитуды виброперемещения k-й метки 

Ординату вектора амплитуды виброперемещения k-й метки 

Вычисляют величину проекции вектора амплитуды виброперемещения k-и метки на направление, перпендикулярное плоскости изображения 

где mk - масштабный коэффициент, связанный со свойствами оптической системы при расфокусировке изображения для k-й метки.
Величина проекции вектора амплитуды виброперемещения k-й метки на направление, перпендикулярное плоскости изображения 
По формуле (1) определяют модуль вектора амплитуды виброперемещения каждой k-й метки.
Таким образом, определяют три проекции, модуль и направление вектора амплитуды виброперемещения каждой k-й метки.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ВИБРАЦИЙ | 2013 |
|
RU2535522C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВИБРАЦИЙ | 2015 |
|
RU2597280C1 |
| Способ контроля технического состояния механизмов | 2019 |
|
RU2726270C1 |
| Способ контроля состояния объектов | 2024 |
|
RU2823990C1 |
| Способ контроля технического состояния механизмов | 2022 |
|
RU2798740C1 |
| Способ контроля технического состояния механизмов | 2021 |
|
RU2765336C1 |
| СПОСОБ ДОПУСКОВОГО КОНТРОЛЯ ПЕЧАТНЫХ ПЛАТ | 2013 |
|
RU2519005C1 |
| УСТРОЙСТВО ДЛЯ СЕЛЕКЦИИ ИЗОБРАЖЕНИЙ ОБЪЕКТОВ | 1990 |
|
RU2032218C1 |
| Способ мониторинга зданий и сооружений | 2016 |
|
RU2629137C1 |
| Способ определения веса отдельных частей неразделимого объекта | 1989 |
|
SU1703988A1 |
Изобретение относится к измерительной технике. На исследуемый объект наносят светоотражающие метки круглой формы. Формируют бинарные изображения меток и следов их вибрационного размытия. При отсутствии вибраций определяют координаты центра тяжести каждой метки, ее площадь и по площади ее радиус. Формируют две дополнительные матрицы, каждая из которых состоит из фрагментов, координаты центра тяжести каждого из которых совмещают с координатами центра тяжести соответствующей метки. Для каждой метки формируют области пересечения, подсчитывают общее количество областей пересечения метки и количество областей пересечения метки, центры тяжести которых совпадают с центром тяжести метки, определяют координаты центров тяжести областей пересечения метки, которые не совпадают с центром тяжести метки, и среди них находят тот, расстояние от которого до центра тяжести метки максимально, фиксируют его как центр тяжести наиболее удаленной от метки ее области пересечения. Полуширину следа вибрационного размытия метки определяют как произведение количества областей пересечения метки, центры тяжести которых совпадают с центром тяжести метки, и ширины кольца. Направление проекции вектора амплитуды виброперемещения метки определяют как угол наклона отрезка прямой, соединяющего центр тяжести метки с центром тяжести наиболее удаленной от него ее области пересечения. Величину этой проекции определяют как разность между длиной этого отрезка и полушириной следа вибрационного размытия метки. Технический результат - расширение функциональных возможностей. 4 ил. 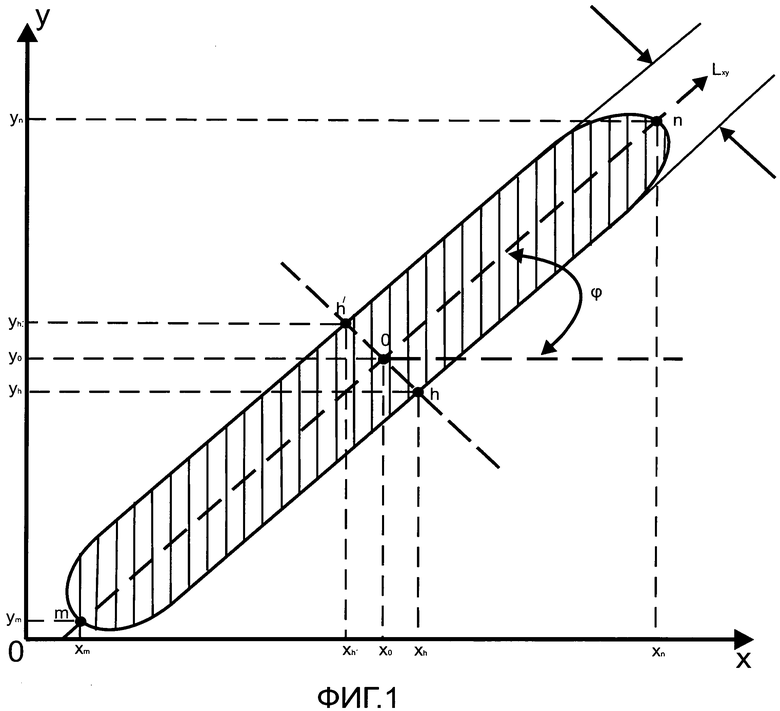
Способ измерения вибраций, включающий закрепление на исследуемом объекте тест-объекта и регистрацию изображения этого тест-объекта с вибрационным размытием, отличающийся тем, что на исследуемый объект в качестве тест-объекта наносят в требуемых местах светоотражающие метки в виде точек круглой формы, формируют бинарные изображения этих меток и следов их вибрационного размытия, при отсутствии вибраций определяют координаты центров тяжести меток и их радиусы, формируют две дополнительные матрицы, каждая из которых состоит из фрагментов, координаты центра тяжести каждого из которых совмещают с координатами центра тяжести соответствующей метки, при этом каждый фрагмент первой дополнительной матрицы представляет собой область связанных элементов в форме круга, диаметр которого выбирают таким образом, чтобы весь ожидаемый след вибрационного размытия соответствующей метки находился в пределах этого фрагмента, а каждый фрагмент второй дополнительной матрицы состоит из примыкающих друг к другу областей связанных элементов, образующих концентрические кольца одинаковой ширины, причем внешний диаметр внешнего кольца равен диаметру соответствующего круга первой дополнительной матрицы, при наличии вибрации для каждой метки формируют области пересечения, каждая из которых представляет собой область связанных элементов, одновременно принадлежащих следу вибрационного размытия этой метки и соответствующему кольцу соответствующего фрагмента второй дополнительной матрицы, подсчитывают общее количество областей пересечения метки и количество областей пересечения метки, координаты центров тяжести которых и метки совпадают, определяют координаты центра тяжести наиболее удаленной от метки области пересечения, полуширину следа вибрационного размытия метки определяют как произведение количества областей пересечения метки, координаты центров тяжести которых и метки совпадают, и ширины кольца соответствующего фрагмента второй дополнительной матрицы, проекцию вектора амплитуды виброперемещения на направление, перпендикулярное плоскости изображения, определяют как разность между полушириной следа вибрационного размытия метки и ее радиусом, направление проекции вектора амплитуды виброперемещения на плоскость изображения определяют как угол наклона отрезка прямой, соединяющего центр тяжести метки с центром тяжести наиболее удаленной от нее ее области пересечения, величину этой проекции определяют как разность между длиной этого отрезка и полушириной следа вибрационного размытия метки.
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВИБРАЦИИ ОБЪЕКТА | 2009 |
|
RU2395792C1 |
| JP 2011075478 A1, 14.04.2011 | |||
| Юденков А | |||
| В | |||
| Контроль частоты и размаха вибрации по изменению контраста в изображении штрихов пирамидальной миры // Автореферат диссертации | |||
| ФГБОУ ВПО "Алтайский государственный технический университет им | |||
| И.И | |||
| Ползунова", 2009 | |||
| WO 1995015480 A1, 08.06.1995 | |||
| JP 2001311658 A, 09.11.2001 | |||
| JPS 63271125 A1, 09.11.1988 | |||
| US 6134006 A1, 17.10.2000 | |||
| СПОСОБ МОНИТОРИНГА МАШИН И СООРУЖЕНИЙ | 2008 |
|
RU2371691C1 |

