Изобретение относится к вибродиагностике механизмов и машин и может использоваться для бесконтактного контроля технического состояния механизмов, как отдельно функционирующих, так и входящих в состав более сложного оборудования, как в условиях производства, так и в условиях эксплуатации этого оборудования, при отсутствии эталонного оборудования, то есть в условиях априорной неопределенности относительно предельно допускаемых значений параметров вибрации оборудования, непосредственно во время работы оборудования без его остановки и разборки.
Известен способ вибродиагностики зарождающихся дефектов механизмов [1]. Этот способ основан на измерении вибрационных ускорений, их полосовой фильтрации, детектировании и определении энергетического спектра. Энергетические спектры огибающих вибрационных ускорений усредняют, выделяют в них существенные локальные максимумы, запоминают их местоположение на оси частот и амплитудные значения этих максимумов на этапе обучения для исправного состояния механизма и при возникновении в нем различных дефектов строят разные эталоны местоположения на оси частот и амплитудных значений существенных максимумов в виде многомерных плотностей вероятности, а на этапе вибродиагностирования выполняют сравнение выделенных в усредненном энергетическом спектре местоположения на оси частот амплитудных значений существенных максимумов с эталонами исправного состояния механизма и состояний механизма при возникновении различных зарождающихся дефектов с помощью оптимального решающего правила, например, критерия Байеса.
Недостатком этого способа является сложность эталонирования. А в тех случаях, когда эталонирование невозможно, невозможно и применение этого способа.
Известен способ контроля технического состояния подшипников качения [2]. Этот способ заключается в обнаружении дефекта и места повреждения путем измерения и анализа параметров вибрации работающего двигателя, анализа параметров вибрации и сравнении получаемых данных с данными в исходном состоянии, за которое принимаются данные, полученные для полностью исправного двигателя. Этот способ основывается на применении оконного преобразования Фурье с использованием весовых функций Гаусса, позволяющих избежать явления «растекания спектра» при вырезке оконных отрезков и повысить точность диагностики технического состояния подшипников, при этом временной интервал сигнала разделяется на подынтервалы и преобразование выполняется для каждого из них в отдельности, получаемый набор интегральных данных от функции, описывающей изменения значений виброускорения по времени, аппроксимируется с применением формулы трапеций, определяется коэффициент превышения, выделяющий информативные особенности сигнала, обусловленные дефектами подшипника качения по времени, частоте и амплитуде.
В этом способе эталонирование существенно проще, чем в предыдущем, но оно сохраняется.
Известен способ диагностики подшипниковых опор турбореактивного двигателя [3]. Этот способ включает измерение амплитудных значений сигнала от датчика на режиме холодной прокрутки, установление порогового уровня амплитуды сигнала по их усредненным значениям, сравнение измеряемых амплитудных значений с диагностическим пороговым уровнем и определение характеристики дефекта по результатам сравнения. Измерение амплитудных значений сигнала производят акустическим микрофоном, установленным в представительной точке внутри корпуса двигателя, выход двигателя на режим холодной прокрутки определяют по превышению установленного значения амплитуд сигналов частот вращения лопаток и ротора, измеряемые амплитудные значения сигнала на режиме холодной прокрутки во всем диапазоне частот отфильтровывают от частот, не связанных с дефектами подшипниковых опор, и разделяют, по меньшей мере, на два диапазона, характеризующих степень развития дефекта, значения пороговых и измеряемых амплитуд частот аппроксимируют в логарифмических координатах, а определение характеристики дефекта производят по результатам сравнения в каждом диапазоне порогового среднеквадратичного значения вибрации со среднеквадратическим значением измеренной амплитуды на режиме холодной прокрутки.
Известен способ вибродиагностики механизмов по характеристической функции вибрации [4]. Этот способ заключается в том, что измеряют вибрацию в информативной точке корпуса механизма машины, выделяют составляющую вибрации, присущую диагностируемому механизму, определяют безразмерный инвариант вибросостояния механизма, контролируют его параметры, по которым судят о техническом состоянии механизма. Безразмерный инвариант представляют характеристической функцией вибрации механизма, пошагово задают величину ее параметра или модуля, определяют текущее значение модуля или параметра, контролируют тенденцию их уменьшения к нулю при деградации механизма при фиксированном значении модуля или параметра и по диапазону текущих значений параметра или модуля характеристической функции вибрации оценивают техническое состояние механизма.
Этот способ совсем не требует эталонирования. Техническое состояние диагностируемого механизма определяется путем анализа тенденции изменения характеристической функции вибрации.
Общим недостатком всех рассмотренных способов контроля технического состояния механизмов является то, что анализируют одномерную функцию измеряемой вибрации от времени. Учитывается информация только об одной проекции векторной величины вибрации. Как показано в [5], эффективность диагностирования при этом сильно снижается.
Другим общим недостатком всех рассмотренных способов контроля технического состояния механизмов является то, что во всех этих способах осуществляется дискретизация отсчетов измеряемого параметра вибрации по времени. Это приводит к тому, что верхняя частотная граница измеряемой вибрации является конечной величиной, и те спектральные составляющие вибрационного процесса, частота которых превышает эту границу, не учитываются системой вибродиагностики.
Известны способы измерения вибраций [6], [7], [8]. В этих способах на поверхность объекта контроля наносят в информативных точках метки круглой формы, при отсутствии вибрации формируют бинарное изображение каждой метки, принимают это изображение в качестве исходного, вычисляют координаты геометрического центра исходного изображения, принимают эти координаты в качестве координат нулевой точки, вычисляют величину радиуса исходного изображения, принимают эту величину в качестве нулевого радиуса, при наличии вибрации формируют изображение каждой метки с вибрационным размытием, принимают это изображение в качестве размытого, на основе сравнительного анализа геометрических параметров исходного и размытого изображений определяют инварианты геометрических параметров траектории вибрационного перемещения информативной точки.
За счет эффекта расфокусирования при приближении информативной точки к регистрирующему устройству радиус изображения метки круглой формы увеличивается, а при удалении от него — уменьшается. В статье [9] теоретически и экспериментально обосновано, что эта зависимость является линейной.
В способе [6] формируют дополнительное изображение путем поворота размытого изображения на 90° относительно нулевой точки, формируют две связные области непересечения, элементы каждой из которых принадлежат размытому изображению, но не принадлежат дополнительному изображению, определяют координаты геометрических центров областей непересечения, из нулевой точки через геометрический центр одной из областей непересечения проводят направляющий луч, определяют две характеристические точки, первая из которых является точкой пересечения направляющего луча и границы дополнительного изображения, а вторая является точкой пересечения направляющего луча и границы размытого изображения, полуширину размытого изображения определяют как расстояние от нулевой точки до первой характеристической точки, инвариант амплитуды проекции траектории вибрационного перемещения на ось аппликат определяют как разность между полушириной размытого изображения и радиусом исходного изображения, инвариант амплитуды проекции траектории вибрационного перемещения на плоскость объекта определяют как разность между расстоянием от нулевой точки до второй характеристической точки и полушириной размытого изображения, инвариант азимутального угла вектора амплитуды вибрационного перемещения определяют как угол между осью абсцисс и направляющим лучом.
В ситуации прямолинейного вибрационного перемещения по оси аппликат дополнительное изображение равно размытому и адекватное формирование инвариантов геометрических параметров траектории вибрационного перемещения не представляется возможным.
Что касается ситуации, когда ни одна из осей эллиптической траектории вибрационного перемещения не лежит в плоскости объекта, то по причине центральной асимметрии размытого изображения, адекватное формирование инвариантов геометрических параметров траектории вибрационного перемещения также не представляется возможным.
Адекватное формирование инвариантов геометрических параметров траектории вибрационного перемещения представляется возможным только при совместном выполнении условий: одна из осей эллиптической траектории вибрационного перемещения лежит в плоскости объекта и вибрационное перемещение не является прямолинейным по оси аппликат. Совместное выполнение этих условий на практике встречается нечасто, из этого следует, что при применении данного способа измерения вибрации для технического контроля механизмов велика вероятность пропуска развивающегося дефекта.
В этом способе формируется три инварианта параметров траектории вибрационного перемещения информативной точки. Временная дискретизация отсчетов измеряемых параметров вибрации отсутствует, поскольку анализируется изображение метки с вибрационным размытием. Верхняя граничная частота контролируемой механической вибрации определяется частотой тестового излучения и при применении видимого света составляет более 300ТГц, то есть является практически бесконечно большой.
Вибрационное перемещение точки работающего оборудования, содержащего механизмы, осуществляется по эллиптической траектории. Прямолинейная траектория вибрационного перемещения является частным случаем эллиптической: если длина малой оси эллипса равна нулю.
Недостатком способа [6] является высокая вероятность пропуска развивающегося дефекта, вызванная тем, что адекватные инварианты контролируемых параметров вибрации формируются только в тех случаях, когда расположение осей эллипса, по которому информативная точка совершает вибрационное перемещение, удовлетворяет условиям: одна из этих осей лежит в плоскости объекта и ее длина больше нуля.
В способе [7] определяют координаты граничных элементов размытого изображения, вычисляют расстояние от каждого такого элемента до нулевой точки, определяют координаты наиболее и наименее удаленного из этих элементов от нулевой точки, определяют минимальное и максимальное расстояния от граничного элемента до нулевой точки, расстояние от первого из названных элементов до нулевой точки принимают в качестве профильной полуширины размытого изображения, расстояние от второго из названных элементов до нулевой точки принимают в качестве полудлины размытого изображения, через нулевую точку и наиболее удаленный от нее граничный элемент размытого изображения проводят прямую, направленную от первой из этих точек в сторону второй, определяют угол между осью абсцисс и построенной направленной прямой, принимают этот угол в качестве инварианта азимутального угла вектора амплитуды вибрационного перемещения, вычисляют расстояние от каждого граничного элемента размытого изображения до построенной направленной прямой, определяют максимальное из этих расстояний, принимают его в качестве максимальной полуширины размытого изображения, вычисляют разность между профильной полушириной размытого изображения и радиусом исходного изображения, принимают ее в качестве инварианта сечения траектории вибрационного перемещения осью аппликат, вычисляют разность между максимальной полушириной размытого изображения и радиусом исходного изображения, принимают ее в качестве инварианта амплитуды проекции траектории вибрационного перемещения на ось аппликат, вычисляют разность между полудлиной размытого изображения и максимальной полушириной размытого изображения, принимают ее в качестве инварианта амплитуды проекции траектории вибрационного перемещения на плоскость объекта.
Преимущество способа [7] по сравнению со способом [6] заключается в большей информативности: формируется не три, а четыре инварианта геометрических параметров траектории вибрационного перемещения, и это формирование осуществляется не только в ситуации, когда одна из осей траектории вибрационного перемещения лежит в плоскости объекта, но и в ситуации, когда ни одна из этих осей не лежит в плоскости объекта.
К недостаткам способа [7] следует отнести то, что при прямолинейном вибрационном перемещении информативной точки по оси аппликат адекватное формирование инвариантов геометрических параметров траектории вибрационного перемещения не представляется возможным. Если информативная точка совершает такое вибрационное перемещение, то контур размытого изображения имеет круглую форму. В результате сформированные инварианты никак не коррелируют с геометрическими параметрами траектории вибрационного перемещения. Другими недостатками способа [7] являются большая погрешность определения координат наиболее удаленного от нулевой точки граничного элемента, вызванная дискретизацией непрерывного изображения, и сильная зависимость величины этой погрешности от ориентации размытого изображения по отношению к растровым координатным осям.
Наиболее близким по технической сущности является способ измерения вибраций [8], в котором формируют дополнительное изображение, состоящее из примыкающих друг к другу концентрических колец одинаковой ширины, геометрический центр которого совмещают с нулевой точкой, а внешний диаметр внешнего кольца выбирают таким образом, чтобы все ожидаемое размытое изображение находилось в пределах окружности этого диаметра, формируют связные области пересечения, элементы каждой из которой принадлежат одновременно размытому изображению и соответствующему кольцу дополнительного изображения, определяют координаты геометрического центра каждой области пересечения, определяют расстояние от этого геометрического центра до нулевой точки, если это расстояние не превышает некоторого, наперед заданного, порогового значения, то область пересечения принимают в качестве кольца размытого изображения, в противном случае область пересечения принимают в качестве дуги размытого изображения, подсчитывают количество колец размытого изображения, умножают его на ширину кольца дополнительного изображения, полученное произведение принимают в качестве профильной полуширины размытого изображения, вычисляют разность между профильной полушириной размытого изображения и радиусом исходного изображения, полученную разность принимают в качестве инварианта сечения траектории вибрационного перемещения осью аппликат, определяют координаты геометрического центра наиболее удаленной от нулевой точки области пересечения, из нулевой точки через геометрический центр наиболее удаленной от него области пересечения проводят направляющий луч, определяют угол между осью абсцисс и этим направляющим лучом, принимают этот угол в качестве инварианта азимутального угла вектора амплитуды вибрационного перемещения, определяют расстояние между нулевой точкой и геометрическим центром наиболее удаленной от него области пересечения, принимают это расстояние в качестве полудлины размытого изображения, вычисляют разность между полудлиной размытого изображения и его профильной полушириной, принимают эту разность в качестве инварианта амплитуды проекции траектории вибрационного перемещения на плоскость объекта.
Преимущество способа [8] по отношению к способу [7] заключается в более широких функциональных возможностях: инварианты параметров траектории вибрационного перемещения формируются при любой ее конфигурации, включая прямолинейное вибрационное перемещение по оси аппликат.
Другим преимуществом этого способа является более высокая точность измерений и независимость погрешности от положения размытого изображения по отношению к растровым координатным осям.
К недостаткам способа [8] следует отнести то, что не формируется инвариант амплитуды проекции траектории вибрационного перемещения на ось аппликат. Это снижает информативность и, следовательно, является фактором, повышающим вероятность пропуска развивающегося дефекта.
Предлагаемый способ контроля технического состояния механизмов позволяет осуществлять достоверный технический контроль, заключающийся в обнаружении в этих механизмах развивающихся дефектов непосредственно во время работы оборудования, оценивать степень развития дефектов. Инварианты параметров вибрации формируются при любом расположении осей и любых параметрах траектории вибрационного перемещения информативной точки, расположенной на поверхности, связанной с оборудованием.
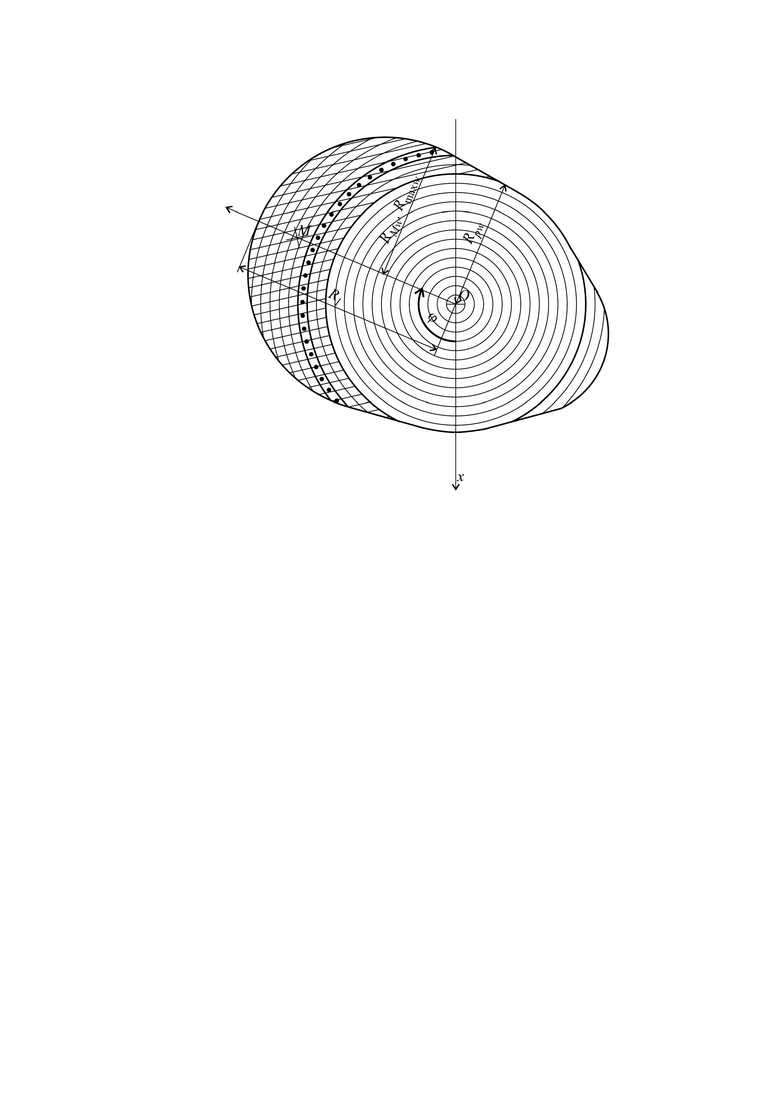
На фиг. 1 представлена схема формирования инвариантов геометрических параметров траектории вибрационного перемещения по предлагаемому способу контроля технического состояния механизмов.
Предлагаемый способ контроля технического состояния механизмов заключается в том, что в информативных точках поверхности, связанной с оборудованием, которое содержит механизмы, наносят метки круглой формы. При выключенном оборудовании формируют бинарное изображение каждой из этих меток. Принимают это изображение в качестве исходного изображения. Вычисляют растровые координаты геометрического центра исходного изображения по формулам:
где i0 и j0 — соответственно, растровая абсцисса и растровая ордината геометрического центра исходного изображения; i и j — порядковые номера строки и столбца, на пересечении которых расположен элемент с растровыми координатами (i,j); I и J — количество строк и столбцов растровой матрицы, соответственно; ξ0(i,j) — функция, принимающая единичное значение, если элемент с растровыми координатами (i,j) принадлежит исходному изображению.
Измерение координат геометрических центров связных областей может осуществляться, например, по методике, изложенной в [10].
Полученные координаты принимают в качестве координат нулевой точки. Вычисляют величину радиуса R0 исходного изображения по формуле:
Принимают этот радиус в качестве нулевого радиуса.
Формируют изображение метки с вибрационным размытием при работающем оборудовании. Принимают это изображение в качестве размытого. На фиг. 1 внешняя граница размытого изображения показана сплошной основной линией.
Формируют дополнительное изображение, состоящее из примыкающих друг к другу концентрических колец одинаковой ширины, геометрический центр которого совмещают с нулевой точкой, а внешний диаметр внешнего кольца выбирают таким образом, чтобы все ожидаемое размытое изображение находилось в пределах окружности этого диаметра, формируют связные области пересечения, элементы каждой из которой принадлежат одновременно размытому изображению и соответствующему кольцу дополнительного изображения. На фиг. 1 границы областей пересечения показаны сплошными тонкими линиями.
Задачу формирования дополнительного изображения и областей пересечения решают следующим, например, образом. Вычисляют расстояние от каждого элемента размытого изображения до нулевой точки по формуле:

Принимают это расстояние в качестве характеристического расстояния элемента размытого изображения.
Задают величину ширины кольца дополнительного изображения c, равной некоторому целому числу элементов растровой матрицы. Вычисляют характеристический параметр hr(i,j) каждого элемента размытого изображения по формуле:

По правилу округления, принятому в математике, округляют полученное значение характеристического параметра элемента размытого изображения с растровыми координатами (i,j) до целого числа. Полученное целочисленное значение принимают в качестве характеристического индекса элемента размытого изображения hc(i,j). Формируют связные области, все элементы каждой из которых имеют один и тот же характеристический индекс. Это и есть области пересечения. Каждой области пересечения присваивают порядковый номер k и ставят его в соответствие каждому элементу этой области. Вычисляют координаты геометрического центра каждой области пересечения по формулам:

где icia(k) и jcia(k) — соответственно, растровые абсцисса и ордината центра области пересечения с порядковым номером k; ξia(k,i,j) — функция, принимающая значение, равное единице, если элемент, имеющий растровые координаты (i,j), принадлежит области пересечения с порядковым номером k и нулю в противном случае.
Определяют расстояние от геометрического центра каждой области пересечения до нулевой точки по формуле:

где hia(k) — расстояние от геометрического центра области пересечения с порядковым номером k до нулевой точки.
Расстояние hia(k) принимают в качестве характеристического расстояния области пересечения с порядковым номером k. Если характеристическое расстояние hia(k) не превышает некоторого наперед заданного целочисленного значения, то область пересечения с порядковым номером k принимают в качестве кольца размытого изображения. В противном случае эту область принимают в качестве дуги размытого изображения. В большинстве случаев в качестве порогового значения целесообразно принять ширину кольца дополнительного изображения c. Подсчитывают количество сформированных колец размытого изображения nr. Вычисляют профильную полуширину размытого изображения Rpw по формуле:
Отрезок прямой, соответствующий профильной полуширине размытого изображения Rpw, обозначен на фиг. 1. Окружность радиуса Rpw обозначена на фиг. 1 сплошной основной линией.
Вычисляют профильный коэффициент уширения размытого изображения Kpw по формуле:
Принимают Kpw в качестве инварианта сечения траектории вибрационного перемещения осью аппликат.
Формируют связные области, состоящие из элементов, принадлежащих дугам размытого изображения. Определяют площадь каждой из этих областей по формуле:
где Saa(k) — площадь связной области дуг размытого изображения, имеющей порядковый номер k; ξaa(k,i,j) — функция, принимающая значение, равное единице, если элемент с растровыми координатами (i,j) принадлежит связной области дуг размытого изображения с порядковым номером k, и нулю, в противном случае.
Определяют связную область, состоящую из элементов, которые принадлежат дугам размытого изображения, имеющую максимальную площадь. Принимают эту область в качестве основного периферийного сегмента размытого изображения (на фиг. 1 заштрихован). Вычисляют координаты геометрического центра основного периферийного сегмента размытого изображения по формулам:
где iM и jM — соответственно, растровые абсцисса и ордината геометрического центра основного периферийного сегмента размытого изображения; ξM(i,j) — функция, принимающая значение, равное единице, если элемент, имеющий растровые координаты (i,j), принадлежит основному периферийному сегменту размытого изображения; SM — площадь основного периферийного сегмента размытого изображения. Геометрический центр основного периферийного сегмента обозначен на фиг. 1 буквой M.
Из нулевой точки через геометрический центр основного периферийного сегмента размытого изображения проводят направляющий луч. (обозначен на фиг. 1 тонкой линией). Вычисляют угол ϕ между осью абсцисс и направляющим лучом по формуле:
Угол ϕ обозначен на фиг. 1. Принимают угол ϕ в качестве инварианта азимутального угла вектора амплитуды вибрационного перемещения.
Вычисляют расстояние от каждого элемента основного периферийного сегмента размытого изображения, через которую проходит направляющий луч по формуле:

где rl(k) — расстояние от элемента направляющего луча с порядковым номером k до нулевой точки; ξM(i,j) — функция, принимающая значение, равное единице, если элемент с растровыми координатами (i,j) принадлежит основному периферийному сегменту размытого изображения; il(k) и jl(k) — соответственно, абсцисса и ордината элемента направляющего луча с порядковым номером k.
Определяют максимальное значение rl(k). Принимают его в качестве полудлины размытого изображения Rl. Отрезок прямой, соответствующий полудлине размытого изображения Rl, обозначен на фиг. 1.
Вычисляют коэффициент удлинения Kl размытого изображения по формуле:
Принимают коэффициент удлинения Kl размытого изображения в качестве инварианта амплитуды проекции траектории вибрационного перемещения на плоскость объекта.
Вычисляют площадь каждой дуги размытого изображения, принадлежащей основному периферийному сегменту по формуле:
где SMw(k) — площадь дуги размытого изображения c порядковым номером k, принадлежащей основному периферийному сегменту.
Определяют дугу размытого изображения, принадлежащую основному периферийному сегменту, площадь которой максимальна. На фиг. 1 эта дуга размытого изображения обозначена точками, ее границы обозначены сплошными основными линиями. Вычисляют кратчайшее расстояние от каждого элемента этой дуги до направляющего луча raw(k). Определяют максимальное из этих расстояний Raw. Принимают его в качестве максимальной полуширины основного периферийного сегмента RMw. Отрезок прямой, соответствующий максимальной полуширине основного периферийного сегмента, RMw обозначен на фиг. 1. Если полученное значение максимальной полуширины основного периферийного сегмента RMw превышает профильную полуширину размытого изображения Rpw, то полученное значение максимальной полуширины основного периферийного сегмента RMw принимают в качестве максимальной полуширины размытого изображения Rmaxw. Отрезок прямой, соответствующий максимальной полуширине размытого изображения Rmaxw обозначен на фиг.1. Если полученное значение максимальной полуширины основного периферийного сегмента RMw не превышает профильную полуширину размытого изображения Rpw, то в качестве максимальной полуширины размытого изображения Rmaxw принимают профильную полуширину размытого изображения Rpw. То есть:
Вычисляют максимальный коэффициент уширения размытого изображения по формуле:

Принимают максимальный коэффициент уширения размытого изображения в качестве инварианта амплитуды проекции траектории вибрационного перемещения на ось аппликат.
Формирование размытого изображения и вычисление инвариантов геометрических параметров траектории вибрационного перемещения повторяют заданное количество раз. Формируют последовательности значений этих инвариантов. Для каждой из этих последовательностей определяют доверительную вероятность того, что в ней отсутствует направленный тренд значений, например, по критерию инверсий. По совокупности значений этих доверительных вероятностей оценивают техническое состояние контролируемых механизмов.
Если, например, доверительная вероятность отсутствия направленного тренда значений хотя бы в одной из последовательностей превышает 0,95, то техническое состояние механизмов признается допустимым, если эта доверительная вероятность находится в пределах от 0,87 до 0,95, то техническое состояние механизмов признается требующим принятия мер, если эта доверительная вероятность менее 0,87, то техническое состояние механизмов признается недопустимым.
Источники информации
1. Пат. RU 2680640, Способ вибродиагностики зарождающихся дефектов механизмов / В.С. Давыдов, Д.В. Стеблянко — МПК G01M 13/04, Опубл. 25.02.2019, Бюл. №6.
2. Пат. RU 2623177, Способ контроля технического состояния подшипников качения / В.Ф. Лукин, Н.Н. Сенной, А.В. Спирькин, А.А. Селезнев — МПК G01M 13/04, Опубл. 22.02.2017, Бюл. №18.
3. Пат. RU 2658118, Способ диагностики подшипниковых опор турбореактивного двигателя / Г.К. Герман, А.И. Зубко, И.О. Зубко — МПК G01M 13/04, Опубл. 19.06.2018, Бюл. №17.
4. Пат. RU 2514119, Способ вибродиагностики механизмов по характеристической функции вибрации / В.Н. Костюков, А.П. Науменко, С.Н. Бойченко, И.С. Кудрявцева — МПК G01M 7/02, G01M 13/04, Опубл. 27.04.2014, Бюл. № 12.
5. НПП «Векторная виброметрия» о возможностях применения векторных виброакселерометров / [Электронный ресурс]. — URL: http://ru.convdocs.org/docs/index-112366.html (Дата обращения 10.08.2019).
6. Пат. RU 2535522, Способ измерения вибраций / А.В. Држевецкий, Н.К. Юрков, А.В. Григорьев, А.В. Затылкин, И.И. Кочегаров, С.В. Кузнецов, Ю.А. Држевецкий, В.А. Деркач — МПК G01H 9/00, Опубл. 10.12.2014, Бюл. № 34.
7. Пат. RU 2597280, Способ измерения вибраций / Ю.А. Држевецкий, С.А. Држевецкий, А.Л. Држевецкий, А.В. Климко, М.В. Кулиев, Д.В. Шерстнев, С.С. Мишанин, А.В. Сурдо — МПК G01H 9/00, Опубл. 10.09.2016, Бюл. № 25.
8. Пат. RU 2535237, Способ измерения вибраций / А.В. Држевецкий, Н.К. Юрков, А.В. Григорьев, А.В. Затылкин, И.И. Кочегаров, С.В. Кузнецов, Ю.А. Држевецкий, В.А. Деркач — МПК G01H 9/00, Опубл. 10.12.2014, Бюл. № 34.
9. Григорьев А.В., Лысенко А.В., Подсякин А.С., Трусов В.А., Юрков Н.К. Приведенная погрешность технологии измерения аппликаты вибрационного перемещения на основе анализа размытия изображения круглой метки // Надежность и качество сложных систем. 2019. №2 (26). С. 79-86. DOI: 10.21685/2307-4205-2019-2-9.
10. Пат. RU 2032218, Устройство для селекции изображений объектов / А.Л. Држевецкий, В.Н. Контишев, А.В. Григорьев, А.Г. Царёв — МПК G06K 9/00, Опубл. 27.03.1995, Бюл. № 24.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля технического состояния механизмов | 2022 |
|
RU2798740C1 |
| Способ контроля состояния объектов | 2024 |
|
RU2823990C1 |
| Способ контроля технического состояния механизмов | 2021 |
|
RU2765336C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВИБРАЦИЙ | 2013 |
|
RU2535522C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВИБРАЦИЙ | 2013 |
|
RU2535237C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВИБРАЦИЙ | 2015 |
|
RU2597280C1 |
| Сканирующий оптический волнограф | 2019 |
|
RU2746186C1 |
| СПОСОБ ВИБРОДИАГНОСТИКИ МЕХАНИЗМОВ ПО ХАРАКТЕРИСТИЧЕСКОЙ ФУНКЦИИ ВИБРАЦИИ | 2012 |
|
RU2517772C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВОЛНОВЫХ АБЕРРАЦИЙ ОПТИЧЕСКОЙ СИСТЕМЫ | 2018 |
|
RU2680657C1 |
| СПОСОБ ВИБРОДИАГНОСТИКИ МЕХАНИЗМОВ ПО ХАРАКТЕРИСТИЧЕСКОЙ ФУНКЦИИ ВИБРАЦИИ | 2012 |
|
RU2514119C2 |
Изобретение относится к вибродиагностике машин и механизмов и может быть использовано для контроля технического состояния механизмов, как отдельно функционирующих, так и входящих в состав более сложного оборудования. При реализации способа в информативных точках поверхности, связанной с оборудованием, наносят метки круглой формы, измеряют геометрические параметры вибрационного размытия изображения каждой из этих меток во время работы контролируемых механизмов, на основе анализа этих параметров формируют безразмерные инварианты геометрических параметров траектории вибрационного перемещения каждой из информативных точек, формируют последовательности значений инвариантов, на основе статистической обработки последовательностей оценивают доверительную вероятность того, что в каждой из них отсутствует направленный тренд, на основе полученных оценок делают выводы о техническом состоянии контролируемых механизмов. Технический результат заключается в повышении достоверности результатов контроля. 1 ил.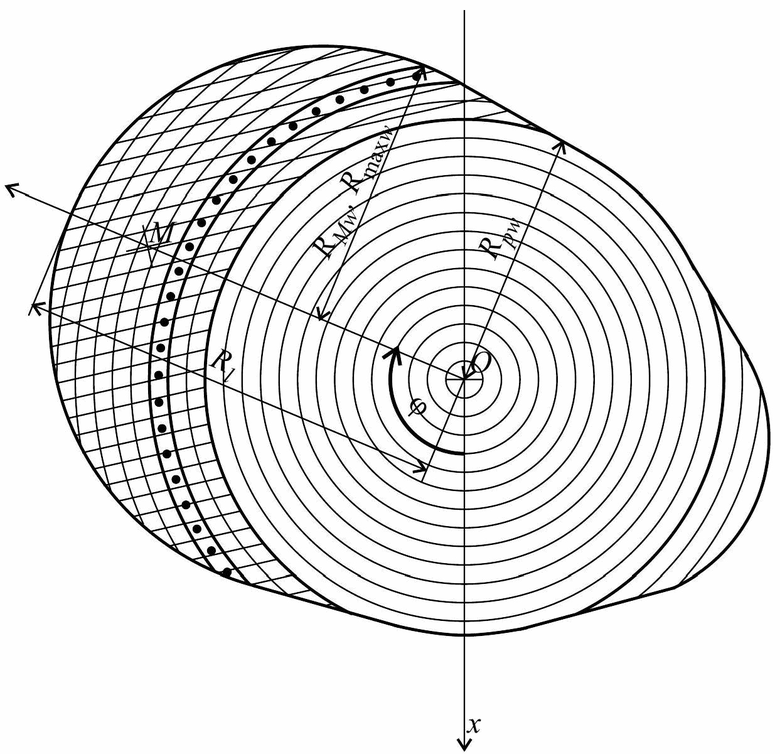
Способ контроля технического состояния механизмов, заключающийся в том, что в информативных точках поверхности, связанной с оборудованием, которое содержит механизмы, наносят метки круглой формы, при выключенном оборудовании формируют бинарное изображение каждой из этих меток, принимают это изображение в качестве исходного, вычисляют координаты геометрического центра исходного изображения, полученные координаты принимают в качестве координат нулевой точки, вычисляют радиус исходного изображения, принимают его в качестве нулевого радиуса, при работающем оборудовании формируют изображение метки с вибрационным размытием, принимают это изображение в качестве размытого, формируют дополнительное изображение, состоящее из примыкающих друг к другу концентрических колец одинаковой ширины, геометрический центр которого совмещают с нулевой точкой, а внешний диаметр внешнего кольца выбирают таким образом, чтобы все ожидаемое размытое изображение находилось в пределах окружности этого диаметра, формируют связные области пересечения, элементы каждой из которых принадлежат одновременно размытому изображению и соответствующему кольцу дополнительного изображения, вычисляют координаты геометрического центра каждой области пересечения, определяют расстояние от геометрического центра каждой области пересечения до нулевой точки, если это расстояние не превышает некоторого наперед заданного значения, то область пересечения принимается в качестве кольца размытого изображения, в противном случае область пересечения принимается в качестве дуги размытого изображения, подсчитывают количество сформированных колец размытого изображения, умножают это количество на ширину кольца дополнительного изображения, полученное произведение принимают в качестве профильной полуширины размытого изображения, вычитают из полученной профильной полуширины размытого изображения нулевой радиус, полученную разность делят на нулевой радиус, полученное частное принимают в качестве инварианта сечения траектории вибрационного перемещения осью аппликат, отличающийся тем, что формируют связные области, элементы которых принадлежат дугам размытого изображения, определяют площади этих областей, определяют область, площадь которой максимальна, принимают эту область в качестве основного периферийного сегмента размытого изображения, вычисляют координаты геометрического центра основного периферийного сегмента размытого изображения, из нулевой точки через геометрический центр основного периферийного сегмента размытого изображения проводят направляющий луч, вычисляют угол между осью абсцисс и этим направляющим лучом, принимают этот угол в качестве инварианта азимутального угла вектора амплитуды вибрационного перемещения, вычисляют расстояние между каждым элементом размытого изображения, через который проходит направляющий луч, и нулевой точкой, определяют максимальное из этих расстояний, принимают его в качестве полудлины размытого изображения, вычитают из полудлины размытого изображения нулевой радиус, полученную разность делят на нулевой радиус, полученное частное принимают в качестве инварианта амплитуды проекции траектории вибрационного перемещения на плоскость объекта, вычисляют площадь каждой дуги размытого изображения, принадлежащей основному периферийному сегменту размытого изображения, определяют дугу размытого изображения, принадлежащую основному периферийному сегменту размытого изображения, площадь которой максимальна, вычисляют кратчайшее расстояние от каждого элемента этой дуги до направляющего луча, определяют максимальное из этих расстояний, если это максимальное расстояние превышает профильную полуширину размытого изображения, то его принимают в качестве максимальной полуширины размытого изображения, в противном случае в качестве максимальной полуширины размытого изображения принимают профильную полуширину размытого изображения, вычитают из максимальной полуширины размытого изображения нулевой радиус, полученную разность делят на нулевой радиус, полученное частное принимают в качестве инварианта амплитуды проекции траектории вибрационного перемещения на ось аппликат, формирование размытого изображения и вычисление инвариантов геометрических параметров траектории вибрационного перемещения повторяют заданное количество раз, формируют последовательности значений этих инвариантов, для каждой из этих последовательностей, например, по критерию инверсий определяют доверительную вероятность того, что в последовательности отсутствует направленный тренд, по совокупности значений этих доверительных вероятностей оценивают техническое состояние контролируемых механизмов.
| СПОСОБ ИЗМЕРЕНИЯ ВИБРАЦИЙ | 2013 |
|
RU2535237C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВИБРАЦИЙ | 2015 |
|
RU2597280C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВИБРАЦИЙ | 2013 |
|
RU2535522C1 |
| УСТРОЙСТВО ДЛЯ СЕЛЕКЦИИ ИЗОБРАЖЕНИЙ ОБЪЕКТОВ | 1990 |
|
RU2032218C1 |
| Приведенная погрешность технологии измерения аппликаты вибрационного перемещения на основе анализа размытия изображения круглой метки / А | |||
| В | |||
| Григорьев, А | |||
| В | |||
| Лысенко, А | |||
| С | |||
| Подсякин, В | |||
| А | |||
| Трусов, Н | |||
| К | |||
| Юрков // Надежность и качество сложных | |||

