Область техники, к которой относится изобретение
Это изобретение относится к системе определения местоположения в помещении, основанной на сигналах глобальной системы определения местоположения (GPS), предназначенной для повышения охвата помещения наружными сигналами GPS.
Предшествующий уровень техники
Глобальная система определения местоположения (GPS) представляет собой радионавигационную систему, которая обеспечивает точное и надежное определение местоположения, навигацию и услуги службы времени, свободно доступные для гражданского населения. Система GPS предоставляет информацию о местоположении и точном времени любому, кто имеет приемник GPS. Система GPS обеспечивает определение местоположения и предоставляет информацию о времени в любой момент и где угодно в мире.
Система GPS состоит из 24 рабочих спутников GPS, совершающих два оборота в сутки вокруг Земли на высоте приблизительно 20200 км, управляющих и контролирующих станций на сетевой стороне, а также приемников GPS на пользовательской стороне. Спутники GPS передают радиочастотные сигналы на частоте 1575,42 МГц из космоса и приемники GPS принимают эти радиочастотные сигналы и преобразуют с понижением частоты в промежуточную частоту (ПЧ) для осуществления корреляции и дальнейшей обработки в полосе частот. Приемники GPS осуществляют корреляцию преобразованного с понижением частоты сигнала с локально генерируемым опорным сигналом и измеряют так называемые псевдодальности между спутником GPS и приемником GPS. Псевдодальность представляет собой фактическое расстояние между спутником GPS и приемником GPS, если время приемника GPS синхронизировано со временем GPS. Однако первоначально имеется отклонение показания часов приемника GPS от времени GPS и это отклонение показания часов сказывается на измерении псевдодальности. После получения псевдодальностей для по меньшей мере четырех спутников GPS приемником GPS предоставляются местоположение самого себя и время GPS.
Приемники GPS повышают качество повседневной жизни, предоставляя доступное средство для точной прокладки маршрута и навигации вне помещения. Кроме того, имеются некоторые области применения определения местоположения в помещении, в которых использование системы GPS может быть очень полезным. Пожарный, пытающийся погасить пожар в здании, или пациент, пытающийся найти дорогу в больнице, или человек, ожидающий освобождения после землетрясения, являются некоторыми типичными примерами применений в помещении.
Сигналы GPS приходят с расстояния 20200 км и уровни этих сигналов являются достаточными только для того, чтобы приемник GPS выполнял обнаружение и оценивание псевдодальностей и посылал сообщения по сигналам GPS при открытом небе. Однако вследствие дополнительных потерь (которые составляют приблизительно 20-30 дБ) обычный приемник GPS не может обнаруживать сигналы GPS в здании, туннеле, шахте и под строительным мусором.
Один способ повышения уровней сигналов GPS в закрытых пространствах заключается в использовании активных радиочастотных ретрансляторов GPS. Активный ретранслятор GPS принимает сигнал GPS вне помещения антенной GPS и после фильтрации и усиления ретранслятор GPS переизлучает сигнал GPS другой антенной GPS к местам, где уровень сигнала GPS является слишком низким для определения местоположения. Для определения местоположения в помещении необходимо размещать многочисленные ретрансляторы GPS: требуются по меньшей мере три ретранслятора для определения местоположения в двух измерениях и четыре ретранслятора для трех измерений. Однако необходимо быть очень осторожным при усилении многочисленных сигналов GPS. Прием многочисленных сигналов GPS на многочисленных антеннах и затем переизлучение тех же самых сигналов GPS от различных антенн является причиной интерференции сигналов. При этом уменьшается покрытие сигналами GPS, а также возрастает ошибка при определении местоположения. Для исключения связанной с интерференцией проблемы ретрансляторы и их антенны следует проектировать так, чтобы конкретный сигнал GPS мог приниматься только одним ретранслятором. Ретранслятор может принимать много различных сигналов GPS; однако другие ретрансляторы не должны принимать сигнал GPS, который принимается еще одним ретранслятором. Иначе говоря, набор сигналов GPS, принимаемых ретрансляторами, должен быть взаимоисключающим. Например, ретранслятор 1: спутники 2, 4 и 5 GPS, ретранслятор 2: спутники 3, 6 и 9 GPS, ретранслятор 3: 15, 16 и 17, и т.д.
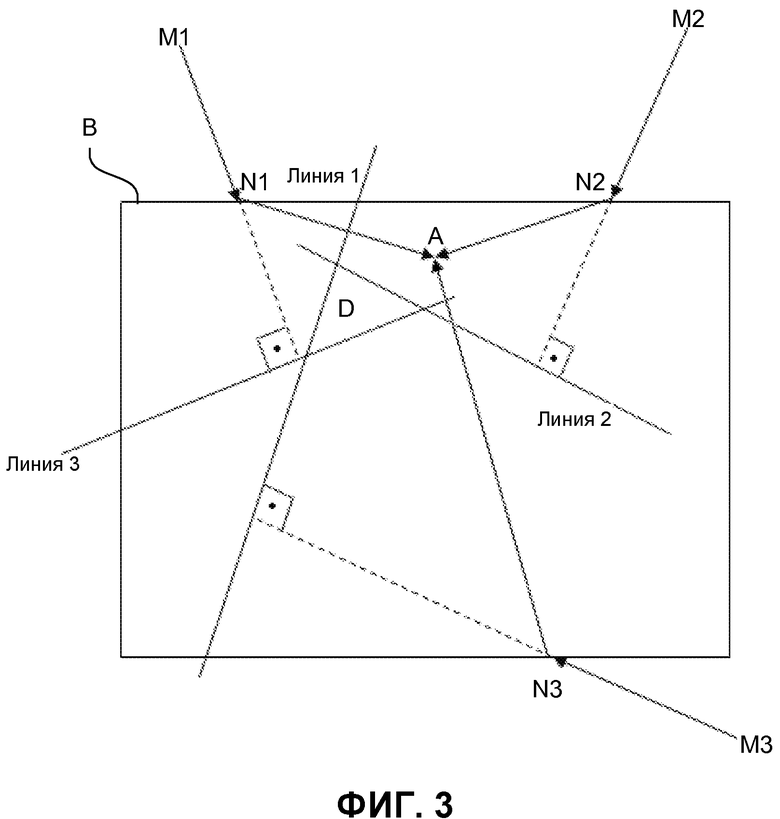
Другой момент, который является очень критичным при определении местоположения в помещении, заключается в использовании алгоритмов GPS для вычисления местоположения на основании измерений псевдодальностей. При использовании обычного приемника GPS совместно с немодифицированными алгоритмами вычисляемое местоположение становится ошибочным. При размещении в здании активных радиочастотных ретрансляторов для увеличения покрытия сигналами GPS в помещении и использовании обычного приемника GPS для вычисления его местоположения вследствие распространения высокочастотных волн от спутника GPS к приемнику GPS не по линии прямой видимости вычисленное местоположение может быть неточным местоположением с большой ошибкой. Пример определения местоположения в двух измерениях можно видеть на фиг.3, где М1, М2 и М3 представляют местоположения спутников GPS; и N1, N2 и N3 представляют местоположения радиочастотных ретрансляторов GPS. «А» является фактическим местоположением приемника GPS. Если отсутствует отклонение показания часов приемника GPS в точке А и значения временных задержек радиочастотных ретрансляторов GPS прокалиброваны, обычными алгоритмами GPS проводится поиск пересечения линии 1, линии 2 и линии 3 и извлекается местоположение только в пределах треугольной области D даже в случае отсутствия ошибки измерения псевдодальностей. Поэтому для точного вычисления местоположения в помещении модифицируют алгоритмы для определения местоположения.
В патентной заявке США № US 2006208946 блок ретранслятора GPS, предназначенный для передачи сигналов в помещение, содержит направленную приемную антенну для приема сигналов GPS с одного или нескольких спутников GPS из заранее выбранного участка неба, передающую антенну для передачи принимаемых сигналов GPS и радиочастотное усилительное средство для повышения уровней принимаемых сигналов GPS до передачи в закрытое помещение. Один или несколько таких блоков ретрансляторов GPS используют для воспроизведения сигналов группировки спутников GPS в здании или подземном помещении, чтобы создавать покрытие сигналами GPS в этих условиях. Нет упоминания об алгоритмах в этом применении. После ретрансляции сигналов GPS дополнительные алгоритмы определения местоположения в помещении должны применяться для вычисления местоположения приемника GPS. Если алгоритмы определения местоположения не являются модифицированными, вычисляемое местоположение не может быть точным.
В патентном документе Китая № CN1776447 оборудование для покрытия сигналом GPS включает в себя источник сигнала GPS, антенну, фильтр, усилитель и систему покрытия сигналом помещения. Для ввода сигнала от источника сигнала GPS установленная наружная приемная антенна соединена с последовательно соединенными фильтром, усилителем и системой покрытия сигналом помещения. Когда сигнал GPS необходим, согласно изобретению происходит усиление сигнала GPS для покрываемого места. Ничего не сказано относительно алгоритмов в этом применении. После ретрансляции сигналов GPS должны применяться алгоритмы определения местоположения в помещении. Если алгоритмы определения местоположения не являются модифицированными, вычисляемое местоположение не может быть точным.
В патентном документе Кореи № KR 20080060502 система для измерений в помещении с использованием ретранслятора GPS с коммутацией включает в себя спутник GPS, опорную антенну GPS, ретранслятор GPS с коммутацией, передающую антенну GPS, расположенный в помещении приемник GPS и измерительный сервер. Опорная антенна GPS принимает со спутника GPS информацию о расстоянии. Ретранслятор GPS с коммутацией регулирует время коммутации GPS. В дополнение к этому ретранслятор GPS с коммутацией усиливает сигнал GPS. Передающая антенна GPS связана с ретранслятором GPS с коммутацией и установлена на стене или потолке для передачи сигнала GPS к ретранслятору GPS. Расположенный в помещении приемник GPS измеряет сигнал, передаваемый с ретранслятора GPS с коммутацией через передающую антенну GPS, и вычисляет расстояние между передающей антенной GPS и расположенным в помещении приемником GPS. Измерительный сервер оценивает местоположение расположенного в помещении приемника GPS путем применения измерительного алгоритма к значению, измеряемому в передающей антенне GPS и ретрансляторе GPS с коммутацией. В этом изобретении отсутствует информация относительно направленных антенн.
В патентной заявке США № US 2003066345 система содержит множество передающих блоков, размещенных на протяжении зоны обслуживания. Каждый передающий блок многократно передает сигнал, включающий в себя информацию о местоположении, относящуюся к местоположению, связанному с передающим блоком. Приемный блок принимает сигнал, передаваемый от передающего блока, и определяет местоположение приемного блока на основании принимаемого показания. Передающие блоки размещены с обеспечением равномерного покрытия зоны обслуживания, в результате чего обеспечивается определение местоположения в помещении и в районах городской застройки, в которых система GPS не функционирует надлежащим образом. В патентной заявке США № US 2003066345 раскрыты система и способ для автоматического определения местоположения с использованием радиочастотного указания. Оно применяется при нахождении местоположения с использованием радиочастотных сигналов. В этом изобретении нет никакой информации относительно систем GPS.
Были проведены большие научно-исследовательские работы по нахождению местоположения в помещении и имеются экспериментальные системы для определения местоположения с использованием различных радиочастотных технологий. В некоторых из этих радиочастотных технологий используется радиочастотная инфраструктура, недавно установленная в зданиях, а для некоторых из этих систем для нахождения местоположения используется уже имеющаяся радиочастотная инфраструктура. Например, сверхширокополосные микроволновые системы используются [1] для основных систем определения местоположения и некоторые из этих способов нахождения местоположения, базирующихся на недавно установленном оборудовании, кратко изложены в [2]. В этих системах используются собственные аппаратные средства для позиционирования и, следовательно, для получения высокоточных местоположений. Однако размещение этих систем является сложной задачей и требует больших затрат. Имеются примеры радиочастотных систем определения местоположения с использованием уже имеющейся инфраструктуры, такой как беспроводная локальная сеть [3], технология Bluetooth [4], система радиочастотной идентификации [5] или глобальная система связи с подвижными объектами [6]. Поскольку все эти системы развернуты преимущественно для целей связи, большей части их присущи недостатки в части точности определения местоположения или зоны покрытия. Наконец, имеются системы, в которых сигнал GPS ретранслируется в помещение с использованием антенн и усилителей, описанных в патентной заявке [7]. В этой заявке описан способ, заключающийся в приеме сигналов GPS из участков небесного свода и после усиления в переизлучении сигналов в помещение. Недостатком этого способа является непрямое прохождение радиочастотных сигналов со спутника GPS к радиочастотному ретранслятору и затем от радиочастотного ретранслятора к радиочастотному приемнику GPS. В этой заявке нет никаких сведений относительно алгоритмов, которые используются в приемнике GPS.
Краткое изложение изобретения
Задача изобретения заключается в создании системы определения местоположения в помещении, в которой повышено покрытие помещения сигналами GPS, принимаемыми вне помещения.
Дальнейшая задача изобретения заключается в создании системы определения местоположения в помещении, которая имеет такую же точность определения местоположения, как точность определения местоположения системой GPS вне помещения.
Краткое описание чертежей
Система определения местоположения в помещении, предназначенная для решения задач настоящего изобретения, показана на сопровождающих чертежах, на которых:
фиг.1 - схематичный вид системы определения местоположения в помещении;
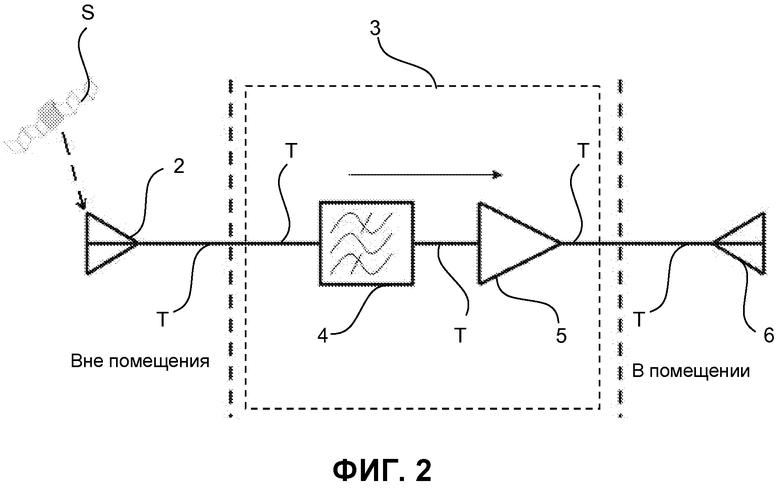
фиг.2 - схематичный вид радиочастотного ретранслятора GPS с направленными антеннами GPS и антенной GPS;
фиг.3 - иллюстрация прохождения сигнала вне прямой видимости для примера двумерной системы GPS, используемой в помещении;
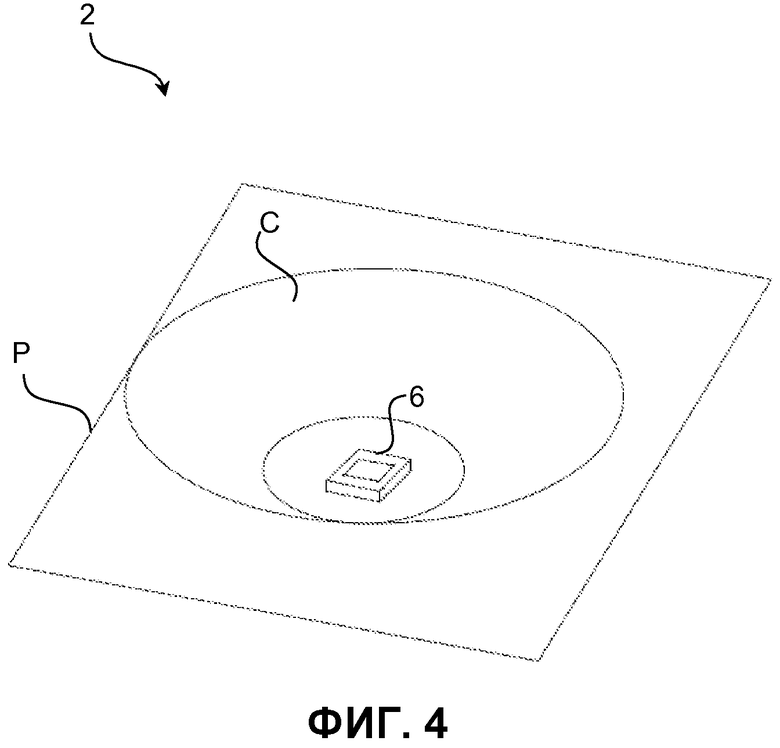
фиг.4 - схематичный вид направленной антенны GPS;
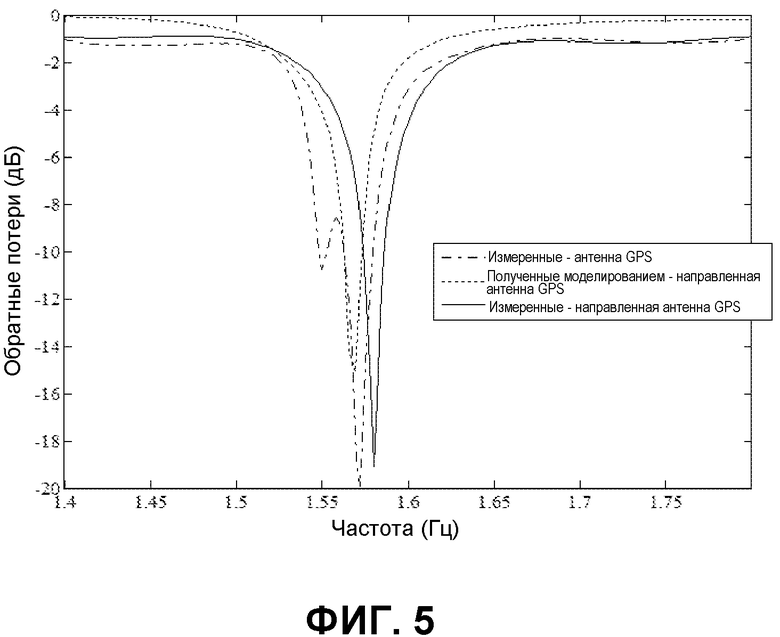
фиг.5 - графическое представление измеренных обратных потерь антенны GPS, полученных моделированием обратных потерь направленной антенны GPS и измеренных обратных потерь направленной антенны GPS в зависимости от частоты;
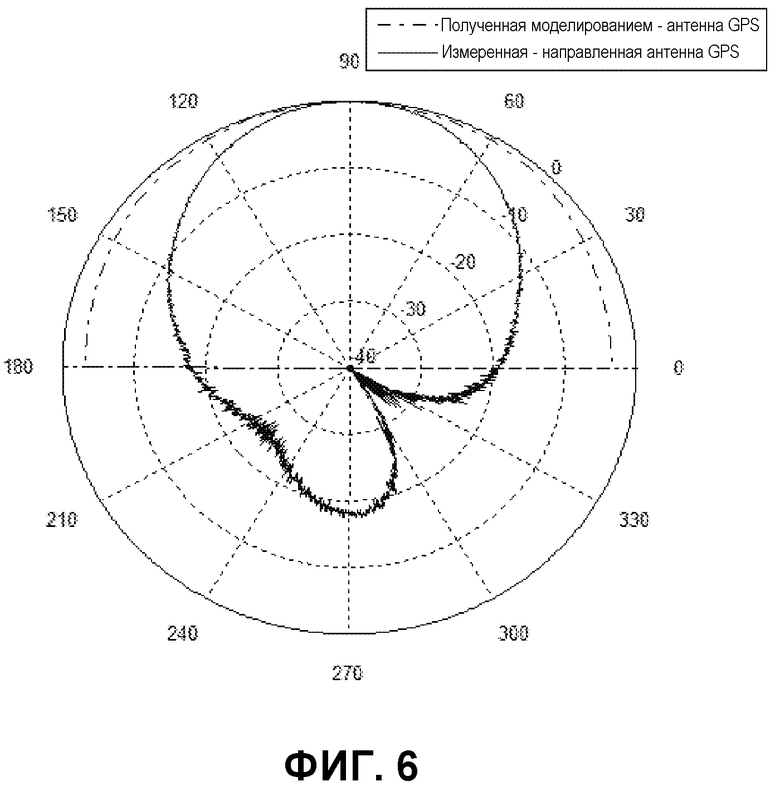
фиг.6 - графическое представление полученной моделированием и измеренной диаграмм направленности излучения антенны GPS и направленной антенны GPS, соответственно;
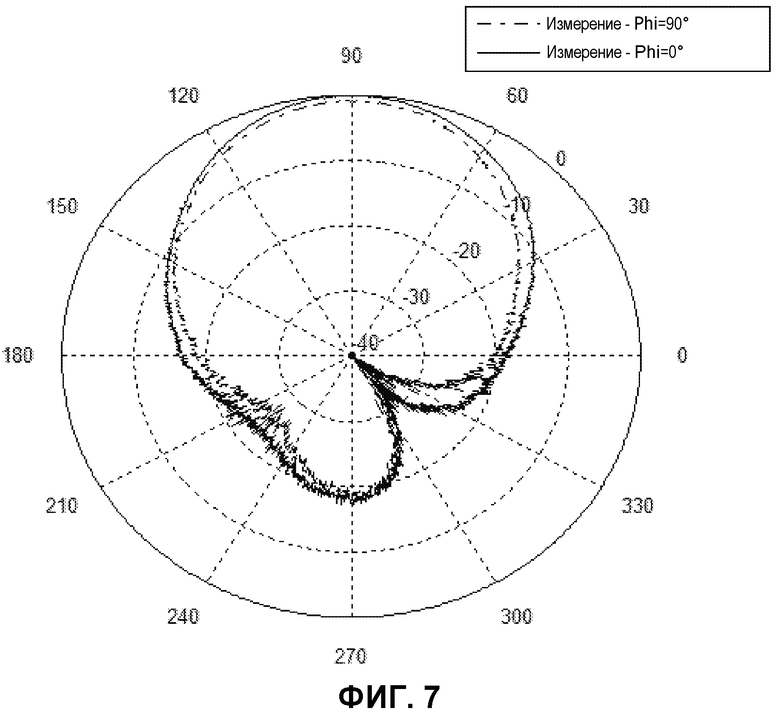
фиг.7 - графическое представление измеренных диаграмм направленности излучения направленной антенны GPS в плоскостях φ=0° и φ=90°;
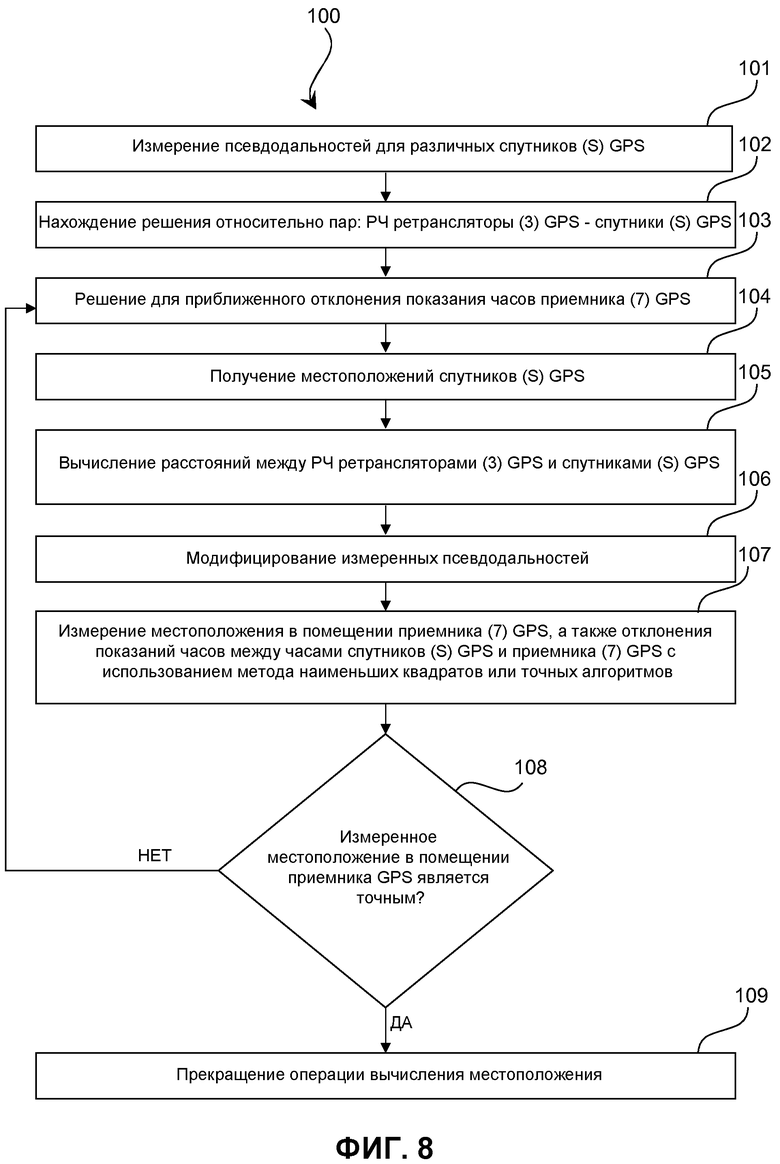
фиг.8 - графическое представление способа вычисления местоположения приемником GPS;
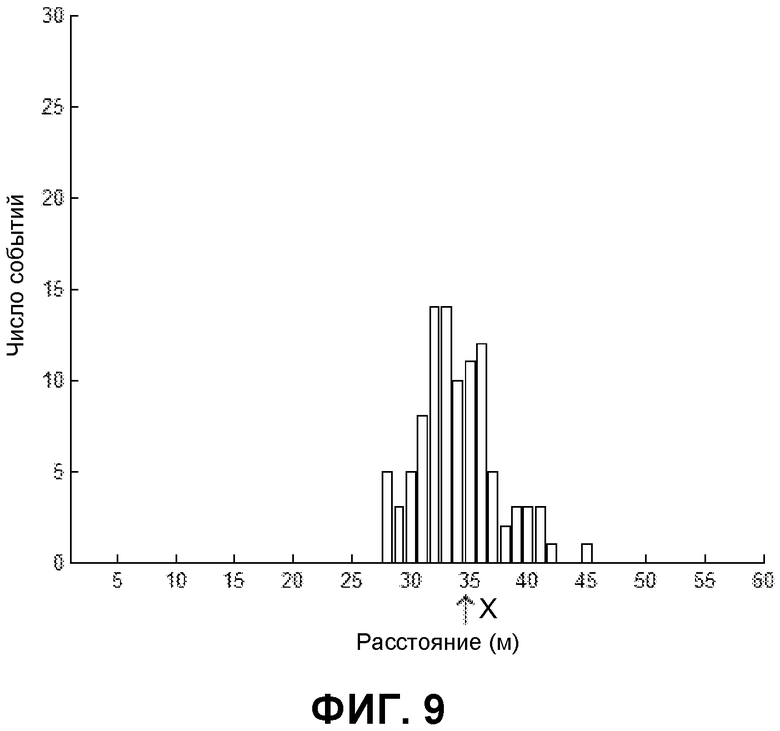
фиг.9 - графическое представление распределения для приемника GPS в плоскости «расстояние - число событий»; и
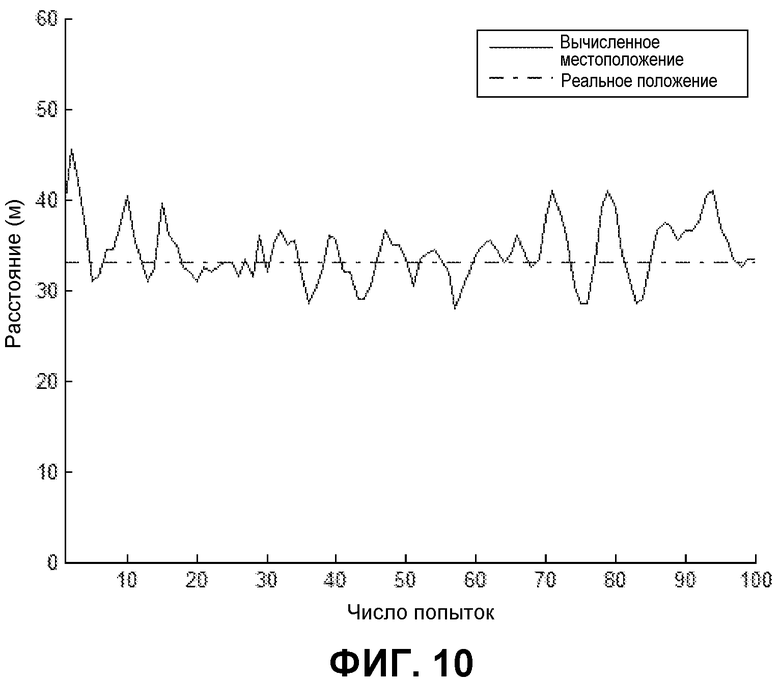
фиг.10 - графическое представление вычисленного местоположения приемника GPS и реального местоположения приемника GPS в плоскости «расстояние - число попыток».
Перечень позиций
Подробное описание изобретения
На фиг.1 система (1) определения местоположения в помещении содержит по меньшей мере три направленные антенны (2а, 2b и 2с) глобальной системы определения местоположения (GPS) для приема специфических сигналов GPS, приходящих с по меньшей мере трех спутников (S1, S4 и S7) GPS, по меньшей мере три радиочастотных ретранслятора (3a, 3b и 3с) GPS для усиления сигналов GPS, приходящих от направленных антенн (2a, 2b и 2с) GPS, по меньшей мере три антенны (6a, 6b и 6с) GPS для передачи сигналов GPS, приходящих от радиочастотных ретрансляторов (3a, 3b и 3с) GPS в помещение, по меньшей мере один приемник (7) GPS для приема своей (7) антенной (8) сигналов GPS, приходящих от антенн (6a, 6b и 6с) GPS, и способ (100) вычисления местоположения для вычисления времени GPS и нахождения местоположения в двух измерениях.
Если имеются три радиочастотных ретранслятора (3) GPS, то может быть выполнено определение местоположения в двух измерениях и может стать доступным время GPS.
Если имеются четыре радиочастотных ретранслятора (3) GPS, то может быть выполнено определение местоположения в трех измерениях и может стать доступным время GPS.
Согласно фиг.2, каждый радиочастотный ретранслятор (3) GPS включает в себя полосовой фильтр (4) для снижения уровня шума, малошумящий усилитель (5) для усиления сигнала GPS и линию (Т) передачи для передачи сигналов GPS от направленной антенны (2) GPS к антенне (6) GPS. Кроме того, имеются линии (Т) передачи между направленными антеннами (2) GPS и радиочастотными ретрансляторами (3) GPS и между радиочастотными ретрансляторами (3) GPS и направленными антеннами (2) GPS.
Направленные антенны (2) GPS излучают более значительную мощность в заданных угловых направлениях, что позволяет улучшать характеристики при передаче, приеме и ослаблять помехи от нежелательных источников. В системе (1) определения местоположения в помещении направленные антенны (2a, 2b и 2с) GPS расположены за пределами здания (В), туннеля или развалин. При использовании антенн (6a, 6b и 6с) GPS вне помещения вместо направленных антенн (2a, 2b и 2с) GPS один сигнал GPS принимается несколькими антеннами (6a, 6b и 6с) GPS. Поэтому, когда эти сигналы GPS переизлучаются в здание (В), они интерферируют друг с другом внутри здания (В). Следовательно, в соответствии с этим ослабляются сигналы GPS, покрывающие помещение, поскольку при интерференции сигналы GPS плавно уменьшаются и образуются глубокие провалы диаграммы направленности внутри здания (В). Вследствие этой интерференции также возрастает ошибка при нахождении местоположения приемника (7) GPS. В системе (1) определения местоположения в помещении сигнал одного спутника (S) GPS принимается только одной направленной антенной (2) GPS. Например, как видно на фиг.1, направленная антенна (2а) GPS принимает сигнал GPS только с одного спутника (S1) GPS, при этом другая направленная антенна (2b) GPS принимает сигнал GPS только с другого спутника (S4) GPS и еще одна направленная антенна (2с) GPS принимает сигнал GPS только с еще одного спутника (S7) GPS, что обусловлено соответствующей конфигурацией их диаграмм направленности излучения. Направленные антенны (2) GPS принимают сигналы всех спутников (S) GPS, которые находятся в пределах направления главного лепестка диаграммы направленности. Направленность этих антенн (2a, 2b и 2с) можно выбирать из условия регулирования уровней перекрестных сигналов GPS.
В этом изобретении, как показано на фиг. 4, используются направленные антенны (2) GPS с боковыми коническими плавающими отражателями (С) для повышения направленности антенн (2). Что касается фиг.4, то антенна (6) GPS, которая помещена на опорную плиту (Р), используется в конструкции направленной антенны (2) GPS, а повышение направленности достигается использованием конического плавающего отражателя (С). В этом изобретении предпочтительно, чтобы направленные антенны (2a, 2b и 2с) GPS работали на частоте 1575,42 МГц с правой круговой поляризацией (RHCP).
Боковые конические плавающие отражатели (С) предпочтительно изготавливать из металла и тем самым повышать направленность направленных антенн (2) GPS. Конический плавающий отражатель (С) не соприкасается с опорной плитой (Р). Отражение от металлов для повышения коэффициента усиления антенн используют во многих антеннах, таких как параболическая антенна. Многочисленные волны, приходящие на антенну, отражаются от металлических поверхностей синфазно с повышением уровня сигнала на антенне. Антенну (6) GPS используют в конструкции направленной антенны (2) GPS, а повышения направленности достигают путем использования конического плавающего отражателя (С) вокруг антенны (6) GPS. Конический плавающий отражатель (С) изготавливают и объединяют с антенной (6) GPS и затем измеряют характеристики направленной антенны (2) GPS.
Полученные моделированием и измеренные обратные потери направленной антенны (2) GPS совместно с измеренными обратными потерями антенны (6) GPS в этом изобретении можно видеть на фиг.5. Как видно из фиг.5, конический плавающий отражатель (С) несколько изменяет входной импеданс. Однако направленная антенна (2) GPS все же имеет обратные потери ниже 12 дБ на частоте 1575,42 МГц.
При работе радиочастотный ретранслятор (3) GPS принимает сигналы GPS направленной антенной (2) GPS, расположенной за пределами здания (В), и переизлучает эти сигналы GPS в закрытое помещение или закрытое пространство. Когда сигнал GPS принимается от направленной антенны (2) GPS, сигнал GPS сначала фильтруется полосовым фильтром (4), затем он усиливается малошумящим усилителем (5) и в заключение еще раз фильтруется полосовым фильтром (4) и после этого переизлучается в здание (В) радиочастотным ретранслятором (3) GPS. После усиления сигнал GPS передается с помощью антенны (6) GPS к приемнику (7) GPS. Типичный радиочастотный ретранслятор (3) GPS с антеннами (2, 6) показан на фиг.2. В этом изобретении для радиочастотных ретрансляторов (3a, 3b и 3с) GPS требуется только источник питания постоянного тока.
Антенна (6) GPS принимает сигнал GPS от радиочастотного ретранслятора (3) GPS и передает этот сигнал GPS к приемнику (7) GPS. Каждая антенна (6) GPS хорошо согласована на частоте родственной направленной антенны (2) GPS и имеет правую круговую поляризацию.
Полученные моделированием и измеренные диаграммы направленности излучения антенны (6) GPS и направленной антенны (2) GPS в этом изобретении можно видеть на фиг.6. На уровне 3 дБ ширина главного лепестка направленной антенны (2) GPS составляет 60°. Коэффициент усиления возрастает, когда угловая ширина главного лепестка уменьшается. Уменьшение угловой ширины главного лепестка при наличии конического плавающего отражателя (С) можно без труда видеть на фиг.6. Измеренное осевое отношение направленной антенны (2) GPS, составляющее 1 дБ, свидетельствует, что, как показано на фиг.7, направленная антенна (2) GPS является кругополяризованной на частоте GPS. Полученный моделированием коэффициент усиления направленной антенны (2) GPS составляет 10 дБ, а измеренный максимальный коэффициент усиления системы в целом (антенны (6) GPS и конического плавающего отражателя (С)) составляет 9 дБ. Полученный моделированием коэффициент усиления антенны (6) GPS составляет 4 дБ. Конический плавающий отражатель (С) придает антенне (6) GPS дополнительный коэффициент усиления 5 дБ.
Приемник (7) GPS принимает своей (7) антенной (8) сигналы GPS, приходящие от антенн (6) GPS, и вычисляет местоположение. В этом изобретении предпочтительно, чтобы приемник (7) GPS работал на частоте 1575,42 МГц. Кроме того, в этом изобретении приемник (7) GPS реализует новый способ (100) вычисления местоположения.
Способ вычисления местоположения заключается в приеме конкретного сигнала GPS с заданного направления и усиления этого сигнала GPS только от радиочастотного ретранслятора (3) GPS, соединенного с направленной антенной (2) GPS. В случае определения местоположения в двух измерениях это следует повторить на по меньшей мере трех различных сигналах GPS для трех различных радиочастотных ретрансляторов (3) GPS. Этим ослабляется проблема самоинтерференции сигналов GPS.
Для вычисления местоположения приемника (7) GPS псевдодальности (расстояние плюс отклонение показания часов, плюс временная задержка) измеряются в помещении приемником (7) GPS. Однако, когда сигналы GPS приходят со спутника (S) GPS, они следуют по радиочастотному тракту: спутник (S1, или S4, или S7) GPS к радиочастотному ретранслятору (3а, или 3b, или 3с) GPS и от радиочастотного ретранслятора (3а, или 3b, или 3с) GPS к приемнику (7) GPS, который, как показано на фиг.1, не находится на прямой линии. Поскольку радиочастотный тракт не является прямой линией и также включает в себя задержки радиочастотного ретранслятора (3) GPS, малошумящего усилителя (5), полосового фильтра (4), линий (Т) передачи и антенн (2, 6), приемник (7) GPS вычисляет с использованием нескорректированных измерений псевдодальностей свое (7) местоположение с ошибкой. Предполагается, что все аппаратные задержки в радиочастотном ретрансляторе (3) GPS со стороны направленной антенны (2) GPS, антенны (6) GPS, полосового фильтра (4), малошумящего усилителя (5) и линий (Т) передачи могут быть заранее измерены с помощью схемного анализатора и прокалиброваны на основании измерений псевдодальностей. В этом случае, если в приемнике (7) GPS используется немодифицированный алгоритм вычисления местоположения, он (7) ищет решение следующей системы (Y) уравнений для определения местоположения в двух измерениях:
R1+R4+Δt∗c=PR1,
R2+R5+Δt∗c=PR2,
R3+R6+Δt∗c=PR3,
где R1, R2, R3 представляют собой расстояния между спутником (S1, или S4, или S7) GPS и радиочастотным ретранслятором (3а, или 3b, или 3с) GPS и R4, R5 и R6 представляют собой расстояния между радиочастотными ретрансляторами (3а, 3b и 3с) GPS и приемником (7) GPS, показанными на фиг.1. «с» является скоростью света и Δt является отклонением показания часов приемника (7) GPS от реального времени GPS и PR1, PR2, PR3 являются измеряемыми псевдодальностями спутников (S1, S4 и S7) GPS, соответственно. В предположении, что эти псевдодальности не содержат аппаратных задержек радиочастотных ретрансляторов (2) GPS, радиочастотные ретрансляторы (2) GPS калибруют, а ошибки, которые возникают вследствие отклонения показания часов спутников (S) GPS, отклонения показания часов приемника (7) GPS, инструментальных задержек спутника (S) GPS, ионосферного эффекта и тропосферных эффектов и вращения Земли, удаляются из уравнений (Y) при поиске решения приемником (7) GPS, но при этом местоположение вычисляется с ошибкой, поскольку путь сигнала GPS со спутников (S) GPS до приемника (7) GPS не является прямой линией.
Взамен в этом изобретении предложено решать нижеследующую систему (Z) уравнений, чтобы ослаблять влияние непрямой линии радиочастотного тракта при вычислении местоположения:
R4+Δt∗c=PR1-R1,
R5+Δt∗c=PR2-R2,
R6+Δt∗c=PR3-R3.
В предположении, что правые части системы (Z) уравнений являются известными, левыми частями системы (Z) уравнений точно определяются правильные окружности дальностей GPS, берущие начало из мест нахождения радиочастотных ретрансляторов (3a, 3b и 3с) GPS. Эту систему (Z) уравнений можно легко решить, чтобы найти пересечение окружностей и получить точное местоположение приемника (7) GPS. Правые части системы (Z) уравнений являются известными, поскольку PR1, PR2 и PR3 являются измеряемыми псевдодальностями, а R1, R2 и R3 можно легко вычислить, поскольку местоположения радиочастотных ретрансляторов (3a, 3b и 3с) GPS являются известными, как и местоположения спутников (S1, S4 и S7) GPS. Например, R1 можно вычислять как расстояние между радиочастотным ретранслятором (3а) GPS и спутником (S1) GPS.
Способ (100) вычисления местоположения приемника (7) GPS включает в себя:
- измерение (101) псевдодальностей для различных спутников (S) GPS,
- принятие (102) решения относительно пар: радиочастотные (РЧ) ретрансляторы (3) GPS - спутники (S) GPS,
- нахождение (103) решения для приближенного отклонения показания часов приемника (7) GPS,
- получение (104) местоположений спутников (S) GPS,
- вычисление (105) расстояний между радиочастотными ретрансляторами (3) GPS и спутниками (S) GPS,
- модифицирование (106) измеренных псевдодальностей,
- измерение (107) местоположения в помещении приемника (7) GPS, а также отклонения показаний часов между часами спутников (S) GPS и приемника (7) GPS с использованием метода наименьших квадратов или точных алгоритмов,
- проверка (108) точности измеренного местоположения в помещении приемника (7) GPS,
- на этапе (108) проверки точности измеренного местоположения в помещении приемника (7) GPS, если измеренное местоположение в помещении приемника (7) GPS не является точным, нахождение приемником (7) GPS места приемника (7) GPS и затем вычисление (104) местоположения спутников (S) GPS (иначе говоря, осуществление перехода к этапу 103),
- на этапе (108) поверки точности измеренного местоположения в помещении приемника (7) GPS, если измеренное местоположение в помещении приемника (7) GPS является точным, прекращение (109) этапов операции вычисления местоположения, показанных на фиг.8.
Приемник (7) GPS измеряет (101) псевдодальности для различных спутников (S) GPS по сигналам, приходящим от различных радиочастотных ретрансляторов (3) GPS. Приемник (7) GPS измеряет псевдодальности, связанные с расстояниями R1+R4, R2+R5 и R3+R6. Эти псевдодальности включают в себя значения отклонений показаний часов приемника (7) GPS и спутников (S) GPS от реального времени GPS, значения временных задержек радиочастотных ретрансляторов (3a, 3b и 3с) GPS и нежелательные эффекты, такие как инструментальные задержки спутников (S) GPS, ионосферный эффект, и тропосферные эффекты, и вращение Земли. Значения отклонений показаний часов спутников (S) GPS от реального времени GPS могут быть легко определены приемником (7) GPS на основании сообщений GPS. После нахождения значений отклонений показаний часов спутников (S) GPS приемник (7) GPS регулирует время GPS спутников GPS. Приемник (7) GPS включает в себя базу данных о местоположениях и значениях временных задержек радиочастотных ретрансляторов (3a, 3b и 3с) GPS, которые обусловлены полосовыми фильтрами (4), малошумящими усилителями (5) и линиями (Т) передачи внутри радиочастотных ретрансляторов (3a, 3b и 3с) GPS. Все значения временных задержек радиочастотных ретрансляторов (3a, 3b и 3с) GPS и местоположения их (3a, 3b и 3с) измеряются заблаговременно и сохраняются в базе данных, которая содержится в приемнике (7) GPS.
Для приемника (7) GPS известны из базы данных местоположения радиочастотных ретрансляторов (3a, 3b и 3с) GPS и также известны угловые положения спутников (S) GPS в геоцентрической земной системе координат из сообщений GPS. Один радиочастотный ретранслятор (3) GPS может принимать сигналы GPS с различных спутников (S) GPS. Например, как видно на фиг.1, радиочастотный ретранслятор (3а) GPS может принимать сигнал GPS с двух спутников (S1 и S2) GPS, тогда как другой радиочастотный ретранслятор (3b) GPS может принимать сигнал GPS с трех спутников (S3, S4 и S5) GPS и еще один радиочастотный ретранслятор (3с) GPS может принимать сигнал GPS с других трех спутников (S6, S7 и S8) GPS. Приемник (7) GPS принимает решение относительно того, какие сигналы GPS и с каких радиочастотных ретрансляторов (3) GPS приходят, на основании угловой информации от радиочастотных ретрансляторов (3a, 3b и 3с) GPS и сигналов GPS. В соответствии с этими данными приемник (7) GPS принимает (102) решение относительно пар: радиочастотные ретрансляторы (3) GPS - спутники (S) GPS.
Приемник (7) GPS находит решение для приближенного отклонения показания часов приемника (7) GPS путем нахождения своего (7) приближенного местоположения с использованием измерения немодифицированных псевдодальностей. Сначала приемник (7) GPS находит свое (7) приближенное местоположение с помощью измеренных и немодифицированных псевдодальностей. Приемник (7) GPS находит свое (7) приближенное время GPS путем предоставления себе (7) возможности получения привязки местоположения к измеренным и немодифицированным псевдодальностям и получения отклонения показания часов от этого приближенного времени GPS.
После нахождения решения для приближенного отклонения показания часов приемника (7) GPS приемник GPS получает (104) местоположения спутников (S) GPS. Приемник (7) GPS получает местоположения спутников (S) GPS в соответствии с приближенным временем GPS самого приемника (7). Точное время GPS следует знать, чтобы знать точное местоположение спутников (S) GPS, но ошибки при нахождении времени GPS не порождают большую ошибку местоположения спутников (S) GPS. Например, временная ошибка 1 мкс влечет за собой ошибку измерения местоположения приемника (7) GPS, соответствующую расстоянию 300 м, однако она влечет за собой ошибку измерения местоположений спутников (S) GPS, соответствующую расстоянию 2,9 мм (2∗π∗2000 км при 12 ч, 2,9 км при 1 с, 2,9 м при 1 мс и 2,9 мм при 1 мкс). После получения лучших местоположений спутников (S) GPS местоположение приемника (7) GPS и отклонение показания часов может быть оценено более точно приемником (7) GPS итерационным способом.
Приемник (7) GPS вычисляет (105) расстояния между радиочастотными ретрансляторами (3) GPS и спутниками (S) GPS, осуществляя корреляцию кода спутников (S) GPS c локально генерируемым кодом GPS.
Когда путь сигнала GPS (со спутника (S) GPS до радиочастотного ретранслятора (3) GPS и затем от радиочастотного ретранслятора (3) GPS до приемника (7) GPS) определен, приемник (7) GPS модифицирует (106) измеренные псевдодальности путем вычитания расстояний между радиочастотными ретрансляторами (3) GPS и спутниками (S) GPS и нежелательных воздействий на псевдодальность, таких как значения отклонений показаний часов приемника (7) GPS и спутников (S) GPS, значения временных задержек радиочастотных ретрансляторов (3a, 3b и 3с) GPS и нежелательные эффекты, такие как инструментальные задержки спутников (S) GPS, ионосферный эффект и тропосферные эффекты и вращение Земли, из измеренных псевдодальностей, что представлено в системе (Z) уравнений.
R4+Δt∗c=PR1-R1,
R5+Δt∗c=PR2-R2,
R6+Δt∗c=PR3-R3.
Значения отклонений показаний часов спутников (S) GPS от реального времени GPS могут быть легко определены на основании сообщений GPS приемником (7) GPS. После нахождения значений отклонений показаний часов спутников (S) GPS приемник (7) GPS регулирует время GPS спутников GPS. Модифицированная псевдодальность представляет собой псевдодальность между радиочастотным ретранслятором (3) GPS и приемником (7) GPS для трех различных спутников (S) GPS.
Приемник (7) GPS измеряет (107) местоположение в помещении самого себя (7), а также отклонение показания часов путем использования метода наименьших квадратов или точных алгоритмов. Система (Z) уравнений может быть решена в точных формах или с получением пересечения трех окружностей или пересечения двух гипербол. Если имеются три радиочастотных ретранслятора (3) GPS и измерения псевдодальности по трем временам прихода от радиочастотных ретрансляторов (3) GPS, приемник (7) GPS использует регулярные методы наименьших квадратов или точные алгоритмы, такие как триангуляция на основании разностей времен прихода), для нахождения местоположения в помещении приемника (7) GPS, а также отклонения показания часов. Время и местоположение приемника (7) GPS вычисляются с такой же точностью, как и приемника (7) GPS вне помещения. Разность времен прихода используется, если в компонентах системы (спутнике (S) GPS и приемника (7) GPS) используется одно и то же время, но отклонение показаний часов между спутником (S) GPS и приемником (7) GPS является неизбежным. Путем вычитания уравнений (Z) друг из друга отклонение показаний часов может быть исключено и получены уравнения разности времен прихода. При вычитании уравнений времен прихода получаются уравнения разности времен прихода.
Приемник (7) GPS исследует (108) точность измеренного положения в помещении приемника (7) GPS путем сравнения решения для отклонения показания часов, которое использует для нахождения местоположения спутника (S) GPS и для удаления нежелательных эффектов, с нахождением решения для отклонения показания часов после определения местоположения. Приемник (7) GPS вычитает значение отклонения показания часов на этапе (107) из значения отклонения показания часов на этапе (103). Затем приемник (7) GPS сравнивает абсолютное значение разности между значением отклонения показания часов на этапе (103) и значением отклонения показания часов на этапе (107) на предмет, оно меньше чем 0,1 мс или нет. Если абсолютное значение меньше чем 0,1 мс, приемник (7) GPS определяет, что измеренное свое (7) местоположение является точным. В противном случае приемник (7) GPS определяет, что измеренное свое (7) местоположение не является точным.
Если измеренное местоположение является точным, приемник (7) GPS прекращает выполнение (109) операции вычисления местоположения.
Если измеренное местоположение не является точным, приемник (7) GPS итерационно находит (103) решение для приближенного отклонения показания часов путем нахождения своего (7) местоположения.
Один результат измерений из результатов способа (100) вычисления местоположения дан на фиг.9 и фиг.10. Приемник (7) GPS был расположен в середине 60-метрового коридора, где отсутствовал сигнал GPS без радиочастотного ретранслятора (2) GPS. Когда радиочастотный ретранслятор (2) GPS включали, можно было вычислять местоположение, показанное на фиг.9 и фиг.10. Среднее значение 100 выборок (10-секундных данных) составляет 33 м, тогда как истинное местоположение находится на расстоянии 33 м от радиочастотного ретранслятора (2) GPS. Эти и другие измерения выполнялись в одном и том же коридоре и были получены следующие результаты, сведенные в таблицу 1.
Как видно из таблицы, средняя ошибка меньше 5 м для всех мест в коридоре.
Хотя это изобретение относится к глобальной системе определения местоположения (GPS), концепцию повышения уровня сигнала в помещении можно также применять к спутникам Галилео, а также к системам, в которых используются гибридные спутники систем GPS и Галилео.
В объеме этой основной концепции можно разрабатывать различные осуществления обладающей признаками изобретения системы (1) определения местоположения в помещении на основании сигнала GPS. Изобретение не может быть ограничено примерами, описанными в этой заявке; оно по существу соответствует формуле изобретения.
Список литературы







Изобретение относится к системам определения местоположения в помещении. Техническим результатом является повышение покрытия помещения сигналами GPS, принимаемыми вне помещения. Настоящее изобретение предусматривает по меньшей мере три направленные антенны (2) GPS для приема специфических сигналов GPS, приходящих с по меньшей мере трех спутников (S) GPS, по меньшей мере три радиочастотных ретранслятора (3) GPS для усиления сигналов GPS, приходящих от направленных антенн (2) GPS, по меньшей мере три антенны (6) GPS для передачи сигналов GPS, приходящих от радиочастотных ретрансляторов (3) GPS в помещение, по меньшей мере один приемник (7) GPS для приема сигналов GPS, приходящих от антенн (6) GPS, своей антенной (8). 2 н. и 11 з.п. ф-лы, 1 табл., 10 ил.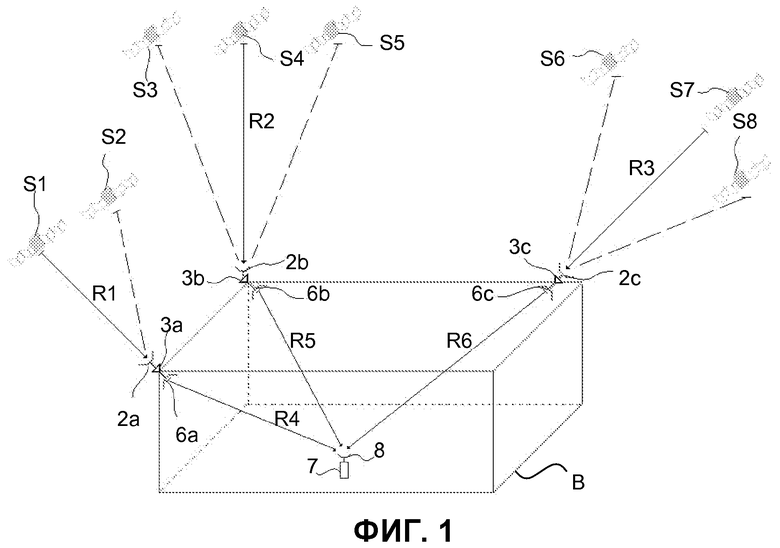
1. Способ (100) определения местоположения внутри помещения, основанный на вычислении времени глобальной системы определения местоположения и нахождении местоположения в двух измерениях, в глобальной системе (1) определения местоположения (GPS) внутри помещения, содержащей по меньшей мере три направленные антенны (2а, 2b и 2с) GPS для приема определенных сигналов GPS, приходящих от по меньшей мере трех спутников (S1, S4 и S7) GPS, по меньшей мере три радиочастотных (RF) ретранслятора (3а, 3b и 3с) GPS для усиления сигналов GPS, приходящих от направленных антенн (2а, 2b и 2с) GPS, по меньшей мере три антенны (6а, 6b и 6с) GPS для передачи сигналов GPS, приходящих от радиочастотных ретрансляторов (3а, 3b и 3с) GPS в помещение, по меньшей мере один приемник (7) GPS для приема сигналов GPS, приходящих от антенн (6а, 6b и 6с) GPS, с помощью его (7) антенны (8),
включающий в себя следующие этапы:
этап (101) измерения псевдодальностей для различных спутников (S) GPS,
этап (102) принятия решения относительно того, какие сигналы GPS приходят от какого RF ретранслятора (3) GPS, на основании угловой информации направленных антенн RF ретрансляторов (3а, 3b и 3с) GPS и сигналов GPS,
этап (103) определения приближенного отклонения часов приемника (7) GPS путем нахождения приближенного местоположения приемника GPS с использованием немодифицированного измерения псевдодальности,
этап (104) получения местоположений спутников (S) GPS,
этап (105) вычисления расстояний между RF ретрансляторами (3) GPS, местоположения которых уже сохранены в базе данных приемника (7) GPS, и спутниками (S) GPS, путем осуществления корреляции кода спутника GPS с локально генерируемым кодом GPS,
этап (106) модифицирования измеренных псевдодальностей путем вычитания расстояний между RF ретрансляторами (3) GPS и спутниками (S) GPS и нежелательных воздействий на псевдодальности, таких как значения отклонений часов приемника (7) GPS и спутников (S) GPS от реального времени GPS, значения временных задержек RF ретрансляторов (3а, 3b и 3с) GPS, и нежелательных эффектов, таких как инструментальные задержки спутников (S) GPS, ионосферный эффект и тропосферные эффекты, и вращение Земли, из измеренных псевдодальностей,
этап (107) измерения местоположения внутри помещения приемника (7) GPS и отклонения между часами спутников (S) GPS и приемника (7) GPS с использованием метода наименьших квадратов или точных алгоритмов, таких как триангуляция на основании разностей времен прихода,
этап (108) проверки точности измеренного местоположения внутри помещения приемника (7) GPS путем сравнения значения отклонения часов на этапе (103) со значением отклонения часов на этапе (107),
при этом, если на этапе (108) измеренное местоположение внутри помещения приемника (7) GPS не является точным, то выполняется определение приемником (7) GPS места приемника (7) GPS и возврат к этапу (103), и
если на этапе (108) измеренное местоположение внутри помещения приемника (7) GPS является точным, то способ определения местоположения завершается.
2. Способ по п.1, отличающийся тем, что значения отклонений часов спутников (S) GPS от реального времени GPS определяются на основании сообщений GPS приемником (7) GPS на этапе (101) измерения псевдодальностей для различных спутников (S) GPS и этапе (106) модифицирования измеренных псевдодальностей.
3. Способ по п.1, отличающийся тем, что на этапе (103) определения приближенного отклонения показания часов приемника (7) GPS производится нахождение приближенного времени GPS путем предоставления возможности приемнику (7) GPS получать привязку местоположения к измеренным и немодифицированным псевдодальностям и получение отклонения часов от этого приближенного времени GPS.
4. Способ по п.1, отличающийся тем, что этап (104) получения местоположений спутников (S) GPS выполняют в соответствии с приближенным временем GPS приемника (7) GPS.
5. Способ по п.1, отличающийся тем, что на этапе (106) модифицирования измеренных псевдодальностей упомянутое модифицирование измеренных псевдодальностей вычитанием расстояний между радиочастотными ретрансляторами (3) GPS и спутниками (S) GPS и нежелательных воздействий на псевдодальность, таких как значения отклонений часов приемника (7) GPS и спутников (S) GPS от реального времени GPS, значения временных задержек радиочастотных ретрансляторов (3а, 3b и 3с) GPS и нежелательные эффекты, такие как инструментальные задержки спутников (S) GPS, ионосферный эффект и тропосферные эффекты, и вращение Земли, из измеренных псевдодальностей, осуществляют в соответствии с системой (Z) уравнений
R4+Δt*c=PR1-R1,
R5+Δt*c=PR2-R2, (Z)
R6+Δt*c=PR3-R3
где
R1, R2, R3 - расстояния между спутником (S1 или S4 или S7) GPS и RF ретранслятором (3а, или 3b, или 3с) GPS,
R4, R5 и R6 - расстояния между радиочастотными ретрансляторами (3а, 3b и 3с) GPS и приемником (7) GPS,
с - скорость света,
Δt - отклонение часов приемника (7) GPS и
PR1, PR2, PR3 - измеренные псевдодальности спутников (S1, S4 и S7) GPS, соответственно.
6. Способ по п.5, отличающийся тем, что решение системы (Z) уравнений выполняют относительно пересечения трех окружностей на этапе (107) измерения местоположения внутри помещения приемника (7) GPS, а также отклонения между часами спутников (S) GPS и приемника (7) GPS с использованием метода наименьших квадратов или точных алгоритмов.
7. Способ по п.5, отличающийся тем, что решение системы (Z) уравнений выполняют относительно пересечения двух гипербол на этапе (107) измерения местоположения внутри помещения приемника (7) GPS, а также отклонения между часами спутников (S) GPS и приемника (7) GPS с использованием метода наименьших квадратов или точных алгоритмов.
8. Способ по п.1, отличающийся тем, что этап (108) проверки точности измеренного местоположения внутри помещения приемника (7) GPS выполняют путем сравнения отклонения часов, которое используется для нахождения местоположения спутника (S) GPS и удаления нежелательных воздействий, с отклонением часов после определения местоположения.
9. Способ по п.1, отличающийся тем, что этап (108) проверки точности измеренного местоположения внутри помещения приемника (7) GPS выполняют путем сравнения абсолютного значения разности между значением отклонения часов на этапе (103) и значением отклонения часов на этапе (107), чтобы установить, является ли оно меньшим чем 0,1 мс, или нет.
10. Глобальная система (1) определения местоположения внутри помещения, содержащая по меньшей мере три RF ретранслятора (3а, 3b и 3с) GPS для усиления сигналов GPS, приходящих от спутников GPS, по меньшей мере три антенны (6а, 6b и 6с) GPS для передачи сигналов GPS, приходящих от RF ретрансляторов (3а, 3b и 3с) GPS внутрь помещения, и по меньшей мере один приемник (7) GPS для приема сигналов GPS, приходящих от антенн (6а, 6b и 6с) GPS, с помощью его (7) антенны (8), отличающаяся тем, что содержит по меньшей мере три направленные антенны (2а, 2b и 2с) GPS, которые используются совместно с боковыми коническими плавающими отражателями (С) для повышения их направленностей (2), для приема определенных сигналов GPS, приходящих от по меньшей мере трех спутников (S1, S4 и S7) GPS.
11. Система (1) по п.10, отличающаяся тем, что RF ретранслятор (3) GPS включает в себя полосовой фильтр (4) для снижения уровня шума, малошумящий усилитель (5) для усиления сигнала GPS и линии (Т) передачи для передачи сигналов GPS от направленной антенны (2) GPS к антенне (6) GPS.
12. Система (1) по п.11, отличающаяся тем, что приемник (7) GPS включает в себя базу данных из местоположений и значений временных задержек RF ретрансляторов (3а, 3b и 3с) GPS, которые обусловлены полосовыми фильтрами (4), малошумящими усилителями (5) и линиями (Т) передачи внутри RF ретрансляторов (3а, 3b и 3с) GPS.
13. Система (1) по п.12, отличающаяся тем, что приемник (7) GPS получает сведения о местоположении RF ретрансляторов (3а, 3b и 3с) GPS из своей базы данных и получает сведения об угловых положениях спутников (S) GPS в геоцентрической земной системе координат из сообщений GPS.
| I | |||
| Petrovski и др.: "Indoor Code and Carrier Phase Positioning with Pseudolites and Multiple GPS Repeaters", Proceedings of the 16th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GPS/GNSS 2003), 09.09.2003, | |||
| I | |||
| Petrovski и др.: "Pseudolite Implementation for Social Infrastructure and Seamless |

