Область техники
Изобретение относится к области радиолокации и предназначено для использования в радиолокационных станциях для детектирования движущихся целей на фоне отражений от земной поверхности.
Уровень техники
Изобретение в наибольшей степени соответствует методам селекции движущихся целей, получившим название череспериодного вычитания сигналов (Бакулев П.А., Степин В.М. Методы и устройства селекции движущихся целей. - М.: Радио и связь, 1986 - 288 с).
Известны способы детектирования движущихся целей путем нахождения разницы между текущим и предыдущим (предыдущими) радиолокационными кадрами и последующей пороговой обработки полученной разницы (Fukunaga K., Hostetler L., D. The Estimation of the Gradient of a Density Function, with Applications in Pattern Recognition. - IEEE Transactions on Information Theory (IEEE), vol. IT-21, NO. 1.01. 1975. - pp.32-40).
Недостатком таких методов является то, что данные способы определяют величины вероятности обнаружения ложных целей и вероятности пропуска целей, которые неприемлемы для ряда приложений.
Известен способ обработки сигналов на фоне сильных импульсных помех в приемном канале импульсно-доплеровских радиолокационных станций, включающем некогерентное накопление, последетекторную некогерентную обработку принимаемых сигналов производят в пределах одного скользящего окна анализа путем последовательного проведения следующих операций: первое взвешивание в соответствии с законом определения весовых коэффициентов, который обратно пропорционален закону, описывающему диаграмму направленности антенны (ДНА); попарный отбор по минимуму из двух для взвешенных сигналов в смежных отводах; второе взвешивание с выходов отборов по минимуму из двух, при котором закон определения весовых коэффициентов прямо пропорционален квадрату закона, описывающего ДНА; суммирование после второго взвешивания (Патент RU 2334247 С1, опубл. 20.09.2008).
Недостатком известного технического решения является то, что при его реализации используется дорогая когерентно-импульсная РЛС. Одним из наиболее существенных недостатков таких РЛС является наличие «слепых скоростей». Этот недостаток проявляется в том, что цели, движущиеся со скоростями, кратными скорости следования зондирующих импульсов, или движущиеся по тангенциальной траектории вокруг РЛС, не могут быть обнаружены.
Сущность изобретения
Задачей настоящего изобретения является создание способа селекции движущихся целей, позволяющего с высокой вероятностью выделять движущиеся цели по данным как от когерентно-импульсных, так и от не когерентно-импульсных РЛС.
Техническим результатом, достигаемым при осуществлении предложенного решения, является уменьшение вероятности обнаружения ложных целей и вероятности пропуска целей.
Технический результат достигается тем, что в способе селекции движущихся целей, включающем нахождение разницы между текущим и предыдущими радиолокационными кадрами с последующей пороговой обработкой, согласно предложенному решению, усредняют несколько предыдущих кадров, полученный разностный радиолокационный кадр делят на области заданного размера и в образованных областях итеративно определяют точки максимальной плотности яркостных отметок в кадре по формуле:
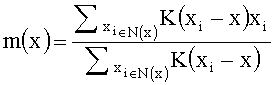
где N(x) - точки яркостных отметок из окрестности точки x, для которых K(x)≠0;
K(x) - гауссово ядро;

µ - постоянный масштабный коэффициент;
x - опорная точка области изображения, положение которой в цикле итерации не изменяется;
xi - точки области изображения, которые последовательно перебираются для подсчета сумм в оценке m(x).
В проанализированной литературе не обнаружено данной совокупности отличительных признаков. Данная совокупность отличительных признаков не вытекает явным образом для специалиста из уровня техники, и данное техническое решение можно с успехом использовать в промышленности. Таким образом, предлагаемое техническое решение соответствует критериям изобретения «Новизна», «Изобретательский уровень», «Промышленное применение».
Краткое описание чертежей
Изобретение поясняется чертежами
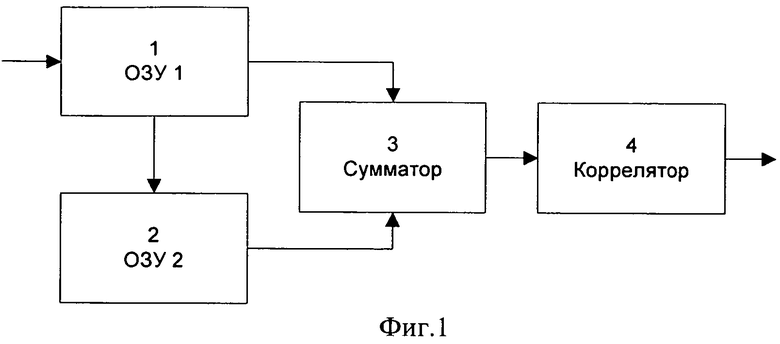
На фиг.1 представлена структурная схема реализации способа;
На фиг.2 приведен один из кадров яркостного радиолокационного изображения, полученного от радиолокационной станции;
На фиг.3 представлено разностное радиолокационное изображение, полученное путем вычитания текущего изображения из усредненного изображения;
На фиг.4 приведен результат определения точек максимальной плотности, то есть результат детектирования движущейся цели.
Структурная схема для реализации способа включает оперативное запоминающее устройство 1 (ОЗУ 1), один выход которого соединен с входом второго запоминающего устройства 2 (ОЗУ 2), второй выход ОЗУ 1 и выход второго ОЗУ 2 соединены с входами сумматора 3, выход которого соединен с коррелятором 4.
Осуществление изобретения
В примере конкретного выполнения оперативные запоминающие устройства ОЗУ 1 и ОЗУ 2 реализованы на микросхеме SRM 20100 LMT, сумматор 3 реализован на микросхеме К525ПС3, коррелятор 4 реализован на сигнальном процессоре ADSP 2105.
В течение периода обзора в ОЗУ 1 накапливается кадр яркостного радиолокационного изображения (фиг.2), откуда копируется и суммируется с содержимым ОЗУ 2. Таким образом, в ОЗУ 2 формируется усредненное радиолокационное изображение. Сумматор 3 считывает изображения, находящиеся в ОЗУ 1 и ОЗУ 2, и суммирует их попиксельно, причем значения пикселей, считываемых из ОЗУ 2, берутся с отрицательным знаком. В результате формируется разностное изображение (фиг.3). Разностное изображение поступает на коррелятор 4, подвергается обработке по формуле:
В начале j-го цикла итерации положение точки x корректируют путем подстановки оценки положения, получаемой из предыдущей итерации j-1. Если в области находится максимум плотности, то точка x и оценка m(x) сходятся. При этом выполняется неравенство
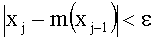
где ε - наперед заданная точность.
Максимум плотности на сегментированном изображении отмечается точками более высокой интенсивности, чем точки области, где вышеуказанное неравенство не выполняется. Следовательно, области, не содержащие максимумов плотности, где неравенство не выполняется, отмечаются точками низкой интенсивности.
В результате - формируется сегментированное изображение (фиг.4), яркие точки высокой интенсивности которого обозначают найденные движущиеся цели.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 2017 |
|
RU2646857C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ ОТРАЖАТЕЛЯ В РАДИОЛОКАТОРЕ БОКОВОГО ОБЗОРА С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ | 2013 |
|
RU2537788C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ ТРАЕКТОРИИ ЦЕЛИ | 2019 |
|
RU2710202C1 |
| СПОСОБ ОДНОЛУЧЕВОГО ИЗМЕРЕНИЯ ВЫСОТЫ И СОСТАВЛЯЮЩИХ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО РАДИОВЫСОТОМЕРА, РЕАЛИЗУЮЩЕГО СПОСОБ | 2013 |
|
RU2551896C2 |
| СПОСОБ СОЗДАНИЯ ДВУХЧАСТОТНОЙ ПОМЕХИ | 2012 |
|
RU2486536C1 |
| СПОСОБ ПОЛЯРИМЕТРИЧЕСКОЙ СЕЛЕКЦИИ ЛОЖНЫХ ВОЗДУШНЫХ ЦЕЛЕЙ | 2020 |
|
RU2769970C1 |
| СПОСОБ СЛЕЖЕНИЯ ЗА ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2153235C2 |
| Способ пространственно-временной адаптивной обработки сигналов в моноимпульсной корабельной радиолокационной станции с активной фазированной антенной решеткой | 2018 |
|
RU2735216C2 |
| СПОСОБ ПОЛУЧЕНИЯ ТРЕХМЕРНОГО РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ПОВЕРХНОСТИ | 2005 |
|
RU2290663C1 |
| Способ получения двумерного радиолокационного изображения объекта при многочастотном импульсном зондировании и инверсном синтезе апертуры с итерационным уточнением расстояния от эквивалентного фазового центра антенны до точки синтезирования | 2016 |
|
RU2628997C1 |

Изобретение относится к области радиолокации и предназначено для использования в радиолокационных станциях для детектирования движущихся целей на фоне отражений от земной поверхности. Достигаемый технический результат - уменьшение вероятности обнаружения ложных целей и вероятности пропуска целей. Указанный результат достигается тем, что находят разницу между текущим и предыдущим радиолокационными кадрами, усредняют несколько предыдущих радиолокационных кадров, полученный разностный радиолокационный кадр делят на области заданного размера и в образованных областях итеративно определяют точки максимальной плотности яркостных отметок в кадре по определенной формуле. 4 ил.
Способ селекции движущихся целей, включающий нахождение разницы между текущим и предыдущими радиолокационными кадрами с последующей пороговой обработкой, отличающийся тем, что усредняют несколько предыдущих кадров, полученный разностный радиолокационный кадр делят на области заданного размера и в образованных областях итеративно определяют точки максимальной плотности яркостных отметок в кадре по формуле:
где N(x) - точки яркостных отметок из окрестности точки x, для которых K(x)≠0,
K(x) - гауссово ядро;
µ - постоянный масштабный коэффициент;
x - опорная точка области изображения, положение которой в цикле итерации не изменяется;
xi - точки области изображения, которые последовательно перебираются для подсчета сумм в оценке m(x).
| СПОСОБ ОБРАБОТКИ СИГНАЛОВ НА ФОНЕ СИЛЬНЫХ ИМПУЛЬСНЫХ ПОМЕХ В ПРИЕМНОМ КАНАЛЕ ИМПУЛЬСНО-ДОПЛЕРОВСКИХ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ | 2007 |
|
RU2334247C1 |
| Шест для прыжков | 1924 |
|
SU4172A1 |
| СПОСОБ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 1999 |
|
RU2143709C1 |
| УСТРОЙСТВО СЕЛЕКЦИИ СИГНАЛОВ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 1991 |
|
RU2255354C2 |
| US 5402131 A, 28.03.1995 | |||
| US 20110025546 A1, 03.02.2011 | |||
| US 7903024 B2, 08.03.2011 | |||
| JP 10123240 A, 15.05.1998 | |||

