Изобретение относится к электротехнике, получающей применение в вентильном электроприводе автономных объектов.
Электроприводы на основе вентильных двигателей (ВД) с возбуждением от постоянных магнитов широко применяются в различных отраслях. Они обладают высокими динамическими характеристиками и эненргоэффективностью, малыми массой и габаритами, высокой надежностью. Существует большое разнообразие систем управления ВД, в то же время появляются новые схемы, имеющие более высокие функциональные возможности. Заявка посвящена синтезу системы управления ВД с возможностью электронного управления углом установки датчика положения ротора (ДПР).
Известно техническое решение (см. заявку RU 2008147082 А, опубликована 10.06.2010, Способ управления вентильным электроприводом), в котором электродвигатель с ротором на постоянных магнитах, статорные обмотки которого подсоединены к выводам переменного тока мостового инвертора, выводами постоянного тока, подключенного к источнику электропитания и емкостному накопителю. Недостатком такого решения является торможение с помощью высокочастотной модуляции в функции величины сигнала движения.
Также, известно техническое решение (см. патент RU 2366069 С1, опубликованный 27.08.2007, Вентильный электропривод), в котором электропривод содержит электродвигатель, устройство формирования цифрового сигнала скорости, преобразователь «код-ШИМ», коммутатор, устройство формирования направления вращения, датчик положения, преобразователь сигнала обратной связи по положению в код, устройство определения ошибки по положению и устройство определения рассогласования по скорости, устройство выделения модуля и наблюдатель скорости, составленный из двух сумматоров, интегратора, устройства выделения модуля, функционального преобразователя и устройства умножения. Наблюдатель скорости по сигналу вырабатывает сигнал оценки, используемый в электроприводе в качестве обратной связи. Недостатком такого решения является отсутствие режима рекуперации, что снижает энергоэффективность электропривода в целом.
Наиболее близким техническим решением (см. заявку RU 93033592 А, опубликована 27.08.1995, Вентильный электропривод), в котором для расширения технических и эксплуатационных возможностей путем расширения арсенала средств управления моментом двигателя применяют механическое управление путем поворота основных частей двигателя (статора или ротора). Предложены двигатели с поворотом ротора датчика положения или разворота роторов датчика положения и собственно двигателя, а также двигатели с непосредственным поворотом и разворотом статоров или с сопряжением ротора со статором с помощью редуктора. Недостатком такого решения является механическое управление датчиком положения ротора.
Общим признаком прототипа и предлагаемого решения является наличие датчика положения ротора и управление по углу установки датчика положения ротора.
Техническим результатом предлагаемого устройства является повышение энергоэффективности электропривода в целом, за счет рекуперации энергии при торможении, повышение КПД.
Сущность изобретения поясняется чертежом, на котором изображена структурная схема электропривода автономного объекта с вентильным двигателем.
Предлагаемое устройство содержит: усилитель 1 с насыщением, на который поступает напряжение задания скорости (Uзс), которое также поступает на сумматор 2, в котором суммируется с напряжением задания потока (Uзфd). Усилитель 1 с насыщением соединен с положительным входом сумматора, к отрицательному входу которого подключен выход тахогенератора 4, с которого поступает сигнал обратной связи по скорости. Выход сумматора 3 соединен со входом регулятора 5 скорости, выход которого соединен со входами тригонометрических преобразователей 6 и 7. Выход тригонометрического преобразователя 6, выполняющего функцию cos, соединен с положительным входом сумматора 8, к отрицательному входу которого подключен выход вычислителя, с которого поступает сигнал обратной связи по току проекции q. Выход сумматора 8 соединен с входом регулятора 10 тока в проекции на ось q, выход которого соединен с входом вычислителя 11. Выход сумматора 2 подключен ко входу усилителя 12 с зоной нечувствительности, выход которого соединен с положительным входом сумматора 13, к отрицательному входу которого подключен выход вычислителя 14, с которого поступает сигнал обратной связи по потоку в проекции на ось d. Выход сумматора 13 соединен со входом регулятора 15 потока проекции на ось d, выход которого соединяется со входом блока 16 установки угла, выходы которого соединены со входами с тригонометрических преобразователей 6 и 7. Выход тригонометрического преобразователя 7, выполняющего функцию sin, соединен с положительным входом сумматора 17, к отрицательному входу которого подключен выход вычислителя 9, с которого поступает обратная связь по току в проекции на ось d. Выход сумматора 17 соединен со входом регулятора 18 тока в проекции на ось d, выход которого соединен со входом вычислителя 11. Выходы вычислителя 11 соединены со входами преобразователя 19. Выходы преобразователя 19 соединены со входами автономного инвертора 20 напряжения, который работает от аккумулятора 21, выход автономного инвертора 20 напряжения соединяется с обмотками вентильного двигателя 22 через датчик 23 тока, выходы датчика 23 тока соединены со входами вычислителя 9. Датчик положения ротора 24 соединен с вентильным двигателем 22. Выходы датчика положения ротора 24 соединены со входами вычислителя 25, выходы вычислителя 25 соединены со входами вычислителей 9 и 11. Выход вычислителя 9 соединен со входом вычислителя 14. Устройство работает следующим образом.
Подается сигнал задания скорости, который с помощью регулятора 5 скорости, тригонометрических преобразователей 6 и 7 регуляторов тока в проекции d и q, вычислителя 11 и преобразователя 19 формирует управляющие сигналы автономного инвертора напряжения 20 с учетом обратных связей по току 23, потоку 24, скорости 4. Подача сигнала задания потока с помощью регулятора 5 потока, блока 16 угла установки воздействует на тригонометрические преобразователи 6 и 7, что позволяет увеличивать скорость вращения двигателя выше номинальной или изменять вид механической характеристики двигателя.
Достигаемый технико-экономический эффект обусловлен расширением функциональных возможностей электропривода с вентильным двигателем, за счет дополнительного управления им по проекции потока Фd, в зависимости от режима работы следствием чего является повышение энергоэффективности за счет оптимизации в режиме пуска и использование режима рекуперативного торможения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| ЭНЕРГОСБЕРЕГАЮЩАЯ СИСТЕМА УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2012 |
|
RU2498496C1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2006 |
|
RU2313895C1 |
| Асинхронный частотно-управляемый электропривод | 1981 |
|
SU1020950A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2006 |
|
RU2320073C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2011 |
|
RU2477562C1 |
| Частотно-регулируемый электропривод | 1982 |
|
SU1023606A1 |
| Электропривод с векторным управлением | 1987 |
|
SU1443112A1 |
| Реверсивный вентильный электродвигатель | 1987 |
|
SU1431015A1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2006 |
|
RU2317632C1 |
Изобретение относится к области электротехники и может быть использовано в вентильном электроприводе автономных объектов. Техническим результатом является повышение энергоэффективности за счет оптимизации в режиме пуска и использования режима рекуперативного торможения. Электропривод автономного объекта с вентильным двигателем содержит датчик положения ротора, автономный инвертор напряжения, регулятор скорости, тригонометрические преобразователи. Выходы регулятора тока в проекции на ось q и регулятора тока в проекции на ось d подключены к вычислителю, а выход вычислителя подключен к управляющему входу автономного инвертора напряжения, который соединен с обмотками вентильного двигателя через обратную связь по току, через обратную связь по скорости и через обратную связь по потоку в проекции на ось d. 1 ил.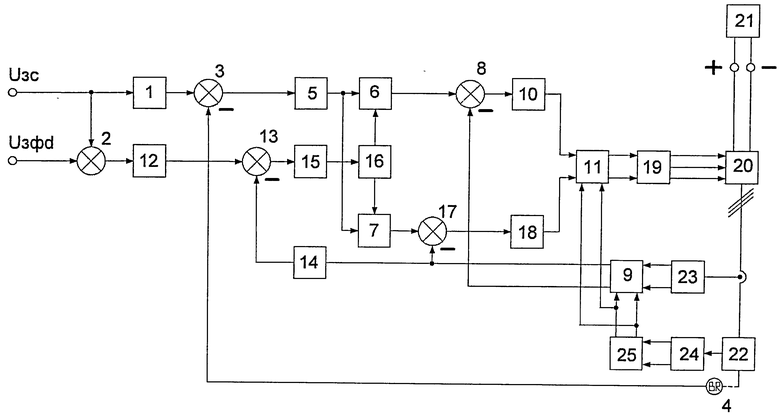
Электропривод автономного объекта с вентильным двигателем, содержащий датчик (24) положения ротора, отличающийся тем, что в него введены автономный инвертор (20) напряжения, регулятор (5) скорости и тригонометрические преобразователи (6) и (7), при этом отрицательный вход сумматора (3) соединен с выходом тахогенератора (4), к положительному входу сумматора (3) подключен выход усилителя (1) с насыщением, выход сумматора (3) соединен со входом регулятора (5) скорости, выход которого соединен со входом тригонометрического преобразователя (6), выполняющего функцию cos, а также со входом тригонометрического преобразователя (7), выполняющего функцию sin, выход тригонометрического преобразователя (6), выполняющего функцию cos, соединен с положительным входом сумматора (8), к отрицательному входу которого подключен выход вычислителя (9), ко входу которого подключены выходы датчика (23) тока, выход сумматора (8) соединен с входом регулятора (10) тока в проекции на ось q, выход которого соединен с входом вычислителя (11), выход сумматора (2) подключен ко входу усилителя (12) с зоной нечувствительности, выход которого соединен с положительным входом сумматора (13), к отрицательному входу которого подключен выход вычислителя (14), ко входу которого подключен выход вычислителя (9), выход сумматора (13) соединен со входом регулятора (15) потока проекции на ось d, выход которого соединен со входом блока (16) установки угла, выходы которого соединены со входами тригонометрических преобразователей (6) и (7), выход тригонометрического преобразователя (7), выполняющего функцию sin, соединен с положительным входом сумматора (17), к отрицательному входу которого также подключен выход вычислителя (9), выход сумматора (17) соединен со входом регулятора (18) тока в проекции на ось d, выход которого соединен со входом вычислителя (11), выходы которого соединены со входами преобразователя (19), выходы преобразователя (19) и аккумулятор (21) соединены со входами автономного инвертора (20) напряжения, выход которого соединен с обмотками вентильного двигателя (22), выход которого соединен со входом датчика (24) положения ротора, выходы которого соединены со входами вычислителя (25), выходы которого соединены со входами вычислителей (9) и (11).
| СПОСОБ УПРАВЛЕНИЯ ВЕНТИЛЬНЫМ ЭЛЕКТРОПРИВОДОМ | 2008 |
|
RU2398348C1 |
| 2008147082 A, 10.06.2010 | |||
| RU 366069 С1, 27.08.2009 | |||
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| СПОСОБ УПРАВЛЕНИЯ ВЕНТИЛЬНЫМ ЭЛЕКТРОПРИВОДОМ | 2008 |
|
RU2398348C1 |
| US 20040007990 A1, 15.01.2004 | |||
| WO 9517780 A1, 29.06.1995 | |||

