Изобрет€;ние относится к электротехнике, а именно к электрическим двигателям с бесконтактной коммутацией, ос ш ествляемой с помогдью полу- проводниковьк приборов, т.е. к вен тильным электродвигателям (ВД), и предназначено для использования преимущественно в высокомоментных ВД$ работающих в реверсивных безредук- торных электромеханизмах сходящих :систем быстродействующих приборов и I роботов.
Цель кзобрете.чия увеличение точности и упрощение ВД
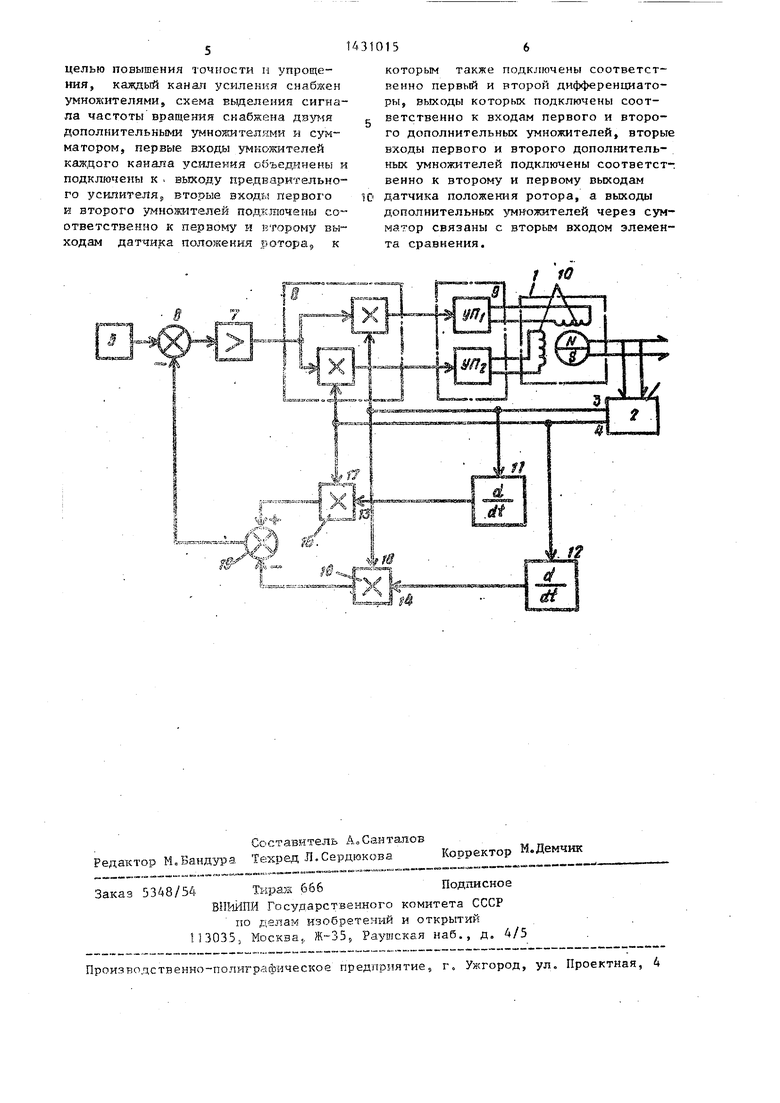
На чертеже представлена функциональная схема реверсивного ВД„
Реверсивный БД содержит электро-- механический преобразователь выполненный в виде синхронной машины 1 синусно-косинусньй датчик 2 положения ротора (ДПР) с первым 3 и вторым 4 выходами на постоянном токе (выполненный например, на индукционном редуктосине с двумя фазочувствитель- ными вьшрямителями) последовательно соединенные задатчшс 5 сигнала, эле- .мент 6 сравнения, предварительный I усилитель 7j коммутатор 8, двухка- :нальньй усилитель-преобразователь- 9 : (может бьзть вьшолнен как на широтно- импульсных преобразователях9 так и на линейных усилителях постоянного тока)J к зыкоцш которого подклгочеьда статорные обмотки 10 синкронной машины 1 „
KoiviMyTaTop 8 выполнен на двух умножителях (например, прецазионных аналоговых перемножителях)э первые входы которых объединены и подключе- .ны к выходу предварительного .усилителя , а вторые входы умножителей подключены к первому 3 и второму 4 выходам датчика 2 положения роторао
К первому -3 и второму 4 выгсодам датчика 2 положения ротора соответственно подключены первый 11 и второй
12дифференциаторы выходы которых соответственно подключены к входам
13и 14 первого 15 и второго 16 дополнительных умножителей, причем вто рые входы 17 и 18 первого 15 и второго 16 дополнительных умно- кителей подключены соответственно к второму 4
и первому 3 выходам датчика 2 положе™ ния ротора,, а выходы дополнительных ут ножителей 15 и 16 через сумматор 19 связаны с вторьм входом устройства 6 сравнения.
В процессе работы ВД движение ротора может происходить по любому произвольному закону.
Сигналы с ДПР будут изменяться в соответствии с выражениями:
и, Uo sino (t),
(О
U UQ COS (У (t),
где Uu - амплитуда сигнала ДОР.
Закон движения « (t) выходного вала электродвигателя определяется сигналом задания U.
Сигнал задания U л, выработанный задатчиком 5 сигнала, сравнивается в элементе 6 сравнения с напряжением обратной связи Upcc « из выходе которого получаеуся сигнал ошибки:
и.
Vи
осе .
(2)
Сигнал ошибки U, пройдя через предварительный усилитель 7, поступает на вход коммутатора 8:
и
6х
KyU
(3)
в результате действия сигналов и и и2 с ДПР 2 на выходах коммутатора 8 образуются напряжения U и Uij:
и K, U U sino/(t);
Ky-U U cose/(t), (4)
Пройдя через двухканальный усили- тель преобразователь 9, сигналы и ил вызывают токи в статорных обмотках 10 синхронной машины 1, кото- pbie в расточке статора создают результирующее магнитное поле, ЭДС которого пропорциональна амплитудному значению статорных токов i и ini
i I sin a/(t);
ip I cos 0 (t) с
(5)
45
Амллитудное значение фазных токов определяется выражением
т Uffp -S BF
J. .-™
(6)
0
5
где и
лр
к„рК,
Ср Ш
пр
амплитудное значение фазных напряжений с выхода усилителя-преобразователя 9; амплитудное значение ЭДС вращения; коэффициент усиления усилителя-преобразователя 9,
Ср - коэффициент, определяе- мьм конструктивными параметрами синхронной машины 1; R - сопротивление фазных
обмоток
. to - текущее значение скорости вращения вала двигателя.
Момент, развиваемый двигателем с учетом (6), равен
Мдв С,,-,.(7)
где Сд - коэффициент, определяемый конструктивными параметрами синхронной машины 1. Мгновенное (текущее) значение угловой скорости вращения вала двигателя под действием момента , (15) определяется выражением
dof(t)
w(t)
dt
(8)
Е, Ка UgCJcoso (t); Е2 -Ко Uq W sin о (t) ,
ff a
(9)
Дифференциаторы 11 и 12 выполняют дифференцирование сигналов с выходов 3 и 4 сигналов (1) ДПР 2. Выходные сигналы дифференциаторов 11 и 12 будут иметь значения с учетом (8):
вый 14 и второй 18 входы второго дополнительного умножителя 16 поступаю соответственно сигналы Е« с второго дифференциатора 12 и U с первого выхода 3 ДПР 2. Выходные сигналы
где Kg - коэффициент передачи дифференциаторов. Полученные сигналы Е, и Е 2. несут информацию об угловой скорости w(t) вращения вала двигателя, но промо- дулированы знакопеременными тригонометрическими функциями углового перемещения cos of (t) и sino((t). Эти сос .тавлякщие в условиях безредукторного следящего электропривода (низкие и инфранизкие частоты, малые угловые перемещения ud) имеют специфические свойства и отфильтровать их традиционными способами (например, RC-фильт рами) практически невозможно.
На первый 13 и второй 17 входы первого дополнительного умножителя 15 поступают соответственно сигналы Е с первого дифференциатора t1 и и второго выхода 4 ДПР 2, а на пер
и Uyj первого и BTopoi o дополнительных умножителей имеют значения:
и
у
KcfOcosV (t);
иу7 rt (t).
(10)
to
is 20
25
30
22
где - коэффициент передачи по угловой скорости. Сигналы и у, и Uyj с дополнительных умножителей 15 и 16 поступают на входы вычитающего сумматора 19, выходной сигнал Uocc которого является сигналом отрицательной обратной связи по угловой скорости и имеет значение (с учетом того, что cos с + + 1)
Uocc Uy,-U,, Kca)(t), (11)
Скоростная обратная связь имеет линейную характеристику и высокую надежность.
Таким образом, скоростная обратная связь в БД не имеет каких-либо ограничений ни по быстродействию, ни по величине скорости, ни по режиму работы электродвигателя.
ВД может с успехом применяться для систем стабилизации скорости и обеспечивать при этом более высокое быстродействие по сравнению с известными .
В качестве усилителя-преобразователя может быть использован как усилитель постоянного тока, так и более эконом11чные широтно-импульсные преобразователи или любой быстродействующий усилитель, 22
40 Формула изобретения
Реверсивный вентильньй электродвигатель, содержащий двухфазный электромеханический преобразователь, первая и вторая фазы обмотки якоря которого подключены к выходам усилителей соответственно первого и второго каналов усиления, управляющие входы которых связаны с первым и вторым выходами датчика положения ротора, последовательно по входу-выходу соединенные задатчик сигнала, Элемент сравнения и предварительный усилитель, а также схему, вьщеления сигнала частоты вращения вала двигателя, включающую в себя два дифференциатора, входы которых связаны с выходами датчика положения ротора, отличающийся тем, что, с
целью повышения точности м упрощения, каждый канал усиления снабжен умножителями, схема вьщеления сигна- па частоты вращения снабжена дополнительными умноткителями и сумматором, первь е входы умножителей каждого канала усиления объединены и подключены к . выходу предварительного усилителя5 вторые входы первого и второго умножителей подключены соответственно к первому и второму выходам датчика положения ротора к
которым также подключены соответственно первый и второй дифференциаторы, выходы которых подключены соответственно к входам первого и второго дополнительных умножителей, вторые входы первого и второго дополнительных умножителей подключены соответст-: венно к второму и первому выходам датчика положения ротора, а выходы дополнительных умножителей через сумматор связаны с вторым входом элемента сравнения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Бесконтактный двигатель постоянного тока | 1987 |
|
SU1684900A1 |
| Вентильный двигатель | 1983 |
|
SU1081753A1 |
| БЫСТРОДЕЙСТВУЮЩИЙ МНОГОФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА В КОД ДЛЯ УСТРОЙСТВ ЭЛЕКТРОМЕХАНОТРОНИКИ | 1994 |
|
RU2094945C1 |
| Способ настройки вентильного электродвигателя | 1987 |
|
SU1436213A1 |
| Реверсивный вентильный двигатель | 1979 |
|
SU826513A1 |
| Способ настройки высокомоментного бесконтактного двигателя постоянного тока | 1991 |
|
SU1804684A3 |
| Способ точной автоматической синхронизации синхронного двигателя, питаемого от преобразователя частоты с инвертором тока, с сетью переменного тока промышленной частоты | 1990 |
|
SU1744755A1 |
| Моментный вентильный электродвигатель | 1981 |
|
SU995218A1 |
| УСТРОЙСТВО КОНТРОЛЯ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2013 |
|
RU2536365C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АСИНХРОНИЗИРОВАННЫМ СИНХРОННЫМ ГЕНЕРАТОРОМ | 2001 |
|
RU2189104C2 |
| Патент США № 4454458, кл | |||
| Способ изготовления фасонных резцов для зуборезных фрез | 1921 |
|
SU318A1 |
| Патент США № 4156169, кл | |||
| Способ изготовления фасонных резцов для зуборезных фрез | 1921 |
|
SU318A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
| Целью изобретения является повыпение точности и упрощение | |||
| Вентильный электродвигатель содержит синхронную машину (СМ) и синусно-косинусньй датчик положения ротора (ДПР) | |||
| Ста- торные обмотки СМ подключены к выходам двухканального усилителя-преобразователя, входы которого подсоединены к выходам коммутатора на аналоговых умножителях | |||
| Работой коммутатора управляют сигналы с ДПР | |||
| На вход коммутатора вентильного электродвигателя поступает сигнал ошибки по скорости вращения, формируемый регулятором скорости по сигналу задания и сигналу обратной связи по скорости (осе) | |||
| Дпя формирования сигнала ОСС постоянного тока применено электрическое дифференцирование сигнала с ДПР с последующим перемножением сигналов с дифференциаторов и сигналов с ДПР и суммированием сигналов произведений | |||
| Вращающийся трансформатор | |||
| ДПР используется для организации главной обратной связи по положению при использовании бесконтактного двигателя в следующем электроприводе | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
