Изобретение относится к устройствам для навигации и ориентации в пространстве, в частности, может быть использовано для определения направления на географический север.
Актуальной задачей современного этапа развития техники является проблема точной привязки различных измерительных и навигационных систем к истинному направлению на географический север. Важность задачи высокоточного определения истинного азимута подчеркивается целым рядом практических применений в ориентировании, навигации, решении задач целеуказания и определения направления на объект, высокоточной ориентации систем связи, геодезии и др.
Традиционным способом определения азимута является измерение направления с помощью магнитного компаса с учетом (или без) магнитного склонения местности. Несмотря на то что указанный метод известен давно, несоответствие магнитного и географического полюсов, наличие магнитных аномалий или намагниченных объектов вблизи делает применение компаса для определения направления на географический север недостаточно точным для решения обозначенных задач.
Решение задачи позиционирования и определения направления движения в ряде случаев может быть достигнуто с помощью современных спутниковых систем, таких как GPS/ГЛОНАС. Однако данные методы, основанные на внешних сигналах, по определению не являются автономными, что может иметь решающее значение для некоторых областей применения, например для решения навигационных задач подводных аппаратов или задач позиционирования в закрытых или подземных объектах. Кроме того, для достижения высокой точности определения направлений необходимо проведение измерений в нескольких удаленных друг от друга точках, а также применение высокоточных приемников сигнала, обеспечивающих малую погрешность в определении координат каждой точки.
Современные методы высокоточного определения ориентации включают широкое применение различных гирокомпасных устройств [1]. Тем не менее, использование высокоточных гирокомпасов с точностью определения азимутального направления лучше чем 0,5° существенно ограниченно их стоимостью, потребляющими и массогабаритными параметрами.
Альтернативным сложившемуся тренду на развитие различных гироскопических систем для решения задачи определения направления может служить автономный метод поиска азимута объекта, основанный на нахождении вектора угловой скорости вращения Земли посредством измерения сил Кориолиса с помощью линейного акселерометра, вращающегося вокруг некоторой оси, параллельной оси чувствительности этого акселерометра [2]. Вместе с тем, точность данного метода невелика в силу малости сил Кориолиса по сравнению с типичным внешним шумовым вибрационным фоном.
Другим, более привлекательным вариантом с точки зрения технической реализации и достижимости высокой точности определения направления географического севера, может служить известный метод, основанный на непосредственном определении вектора угловой скорости вращения Земли  с помощью углового акселерометра, вращающегося относительно оси, ортогональной оси чувствительности этого акселерометра. Суть метода заключается в модуляции сигнала скорости вращения Земли принудительным механическим вращением углового акселерометра. В случае когда ось вращения не параллельна
с помощью углового акселерометра, вращающегося относительно оси, ортогональной оси чувствительности этого акселерометра. Суть метода заключается в модуляции сигнала скорости вращения Земли принудительным механическим вращением углового акселерометра. В случае когда ось вращения не параллельна  , проекция ωз вектора угловой скорости вращения Земли на ось чувствительности углового акселерометра, а значит, и его выходной сигнал, периодически изменяются при вращении акселерометра, что позволяет определить положения оси чувствительности, лежащие в одной плоскости с вектором угловой скорости вращения Земли
, проекция ωз вектора угловой скорости вращения Земли на ось чувствительности углового акселерометра, а значит, и его выходной сигнал, периодически изменяются при вращении акселерометра, что позволяет определить положения оси чувствительности, лежащие в одной плоскости с вектором угловой скорости вращения Земли  , а значит, и направление на географический север [3, 4]. Описываемый метод мог бы быть довольно эффективным при наличии достаточно чувствительного измерителя углового движения. Вместе с тем, доступные до недавнего времени угловые датчики движения, включая микроэлектромеханические и волоконно-оптические, не позволяют получить необходимую высокую точность при их применении. Тем не менее, решение задачи высокоточного определения азимутального направления с помощью данного метода достижимо при использовании более чувствительного и точного углового сенсора. В качестве такого сенсора может быть использован угловой датчик, построенный на принципах молекулярно-электронной технологии [5-10]. Описываемое решение реализовано в патенте [11].
, а значит, и направление на географический север [3, 4]. Описываемый метод мог бы быть довольно эффективным при наличии достаточно чувствительного измерителя углового движения. Вместе с тем, доступные до недавнего времени угловые датчики движения, включая микроэлектромеханические и волоконно-оптические, не позволяют получить необходимую высокую точность при их применении. Тем не менее, решение задачи высокоточного определения азимутального направления с помощью данного метода достижимо при использовании более чувствительного и точного углового сенсора. В качестве такого сенсора может быть использован угловой датчик, построенный на принципах молекулярно-электронной технологии [5-10]. Описываемое решение реализовано в патенте [11].
Кроме того, близким аналогом является патент [12] на инерционный определитель направления на географический север. Решение представляет собой негироскопическую инерционную систему, позволяющую определять азимут на географический север. Система функционирует с использованием жидкостного углового акселерометра, установленного на вращающуюся платформу. Датчик углового движения устанавливается на платформу, способную вращаться с некоторой постоянной угловой скоростью, так, чтобы его ось чувствительности к угловому движению была ортогональна вектору угловой скорости вращения платформы. Описанная система выбрана в качестве прототипа предлагаемого технического решения.
В то же время точность такого устройства и метода измерения зависит от степени ортогональности оси вращения платформы к оси чувствительности углового движения. Неортогональность осей приводит к тому, что, помимо собственно угловой скорости вращения Земли, в сигнале, полученном с датчика углового движения, присутствует проекция на ось чувствительности датчика, в общем случае, непостоянной скорости вращения платформы.
Учитывая, что неравномерность вращения платформы, как правило, имеет периодичность, соответствующую периоду вращения, указанный паразитный сигнал, обусловленный неравномерностью вращения, оказывается на той же частоте, что и измеряемая скорость вращения Земли, модулированная вращением платформы. Такой паразитный сигнал не может быть устранен частотной фильтрацией и увеличением времени усреднения сигналов. В итоге, существенно снижается точность определения направления на географический север.
Задачей изобретения является создание устройства для определения направления на географический север, обеспечивающего устранение вышеупомянутых недостатков.
Предлагаемое устройство позволяет определять направление на географический север с высокой точностью, сопоставимой с точностью современных прецизионных гирокомпасов, но значительно дешевле. По сравнению с другими устройствами, реализующими динамический метод определения положения в пространстве, предлагаемое решение обеспечивает более высокую точность измерений, поскольку позволяет компенсировать ошибки, связанные с неравномерностью скорости вращения платформы. Предлагаемое устройство характеризуется малыми габаритами, малым энергопотреблением и малой массой изделия и позволяет проводить измерения в сложных условиях, когда нет возможности использовать другие средства навигации.
Указанный технический результат достигается за счет того, что устройство для определения направления на географический север, представляющее собой молекулярно-электронный датчик угловых движений с осью чувствительности, ориентированной примерно в горизонтальной плоскости, установленный на платформу, вращающуюся относительно неподвижного основания, вокруг оси, близкой к вертикальной, содержит датчик, способный измерять скорость вращения платформы относительно неподвижного основания, и контроллер, управляющий вращением платформы и проводящий совместную обработку сигналов, полученных от молекулярно-электронного датчика угловых движений и датчика скорости вращения платформы. При этом в качестве датчика, измеряющего угловую скорость вращения платформы относительно неподвижного основания, может использоваться магнитный энкодер углового положения платформы, сигнал которого дифференцируется, или оптический энкодер углового положения платформы, сигнал которого дифференцируется, или угловой акселерометр, сигнал которого интегрируется, или миниатюрный гироскоп, или другое устройство, позволяющее измерить скорость вращения платформы.
Предлагаемое исполнение устройства позволяет, в частности, измерять неравномерность вращения платформы, регулировать положение оси чувствительности датчика углового движения по отношению к оси вращения платформы с целью уменьшения неортогональности в положении оси чувствительности датчика и оси вращения платформы, проводить обработку сигналов с целью компенсации ошибок измерений, связанных с неортогональностью оси вращения платформы и оси чувствительности датчика угловых движений, и неравномерности вращения платформы.
Рассмотрим, насколько сильно неортогональность положения оси чувствительности датчика к оси вращения платформы влияет на ошибки в показаниях устройства. Если ось чувствительности расположена под неким углом к оси вращения платформы, отличным от 90 градусов, тогда молекулярно-электронный датчик, помимо вращения Земли, чувствует неравномерность вращения платформы, что существенно сказывается на точности определения направления на географический север.
Формула (1) описывает сигнал молекулярно-электронного датчика угловых движений после вычисления преобразования Фурье
 ,
,
где Ω - проекция угловой скорости вращения Земли;
δ - фаза выходного полезного сигнала;
Uдат - сигнал датчика, измеряющего скорость вращения платформы во времени;
α - угол отклонения оси чувствительности молекулярно-электронного датчика от перпендикулярности к вектору угловой скорости платформы;
ωср - номинальная (средняя) угловая скорость вращения платформы.
Первое слагаемое представляет полезный сигнал.
Второе слагаемое - паразитный сигнал, влияние которого на точность измерений должно быть снижено путем использования предлагаемого решения.
Последнее слагаемое представляет ошибки, не связанные с неравномерностью вращения платформы (шум, влияние силы тяжести), которые в данный момент рассматривать не будем, и примем Uerr(ωcp)=0.
Чтобы исключить влияние второго слагаемого в ошибку определения направления на географический север, в состав устройства предлагается добавить дополнительный датчик, с помощью которого возможно измерять скорость вращения платформы в реальном времени. С помощью сигнала такого датчика осуществляется измерение неравномерности вращения, и полученный сигнал используется для настройки системы и при дальнейшей обработке данных.
Краткое описание чертежей
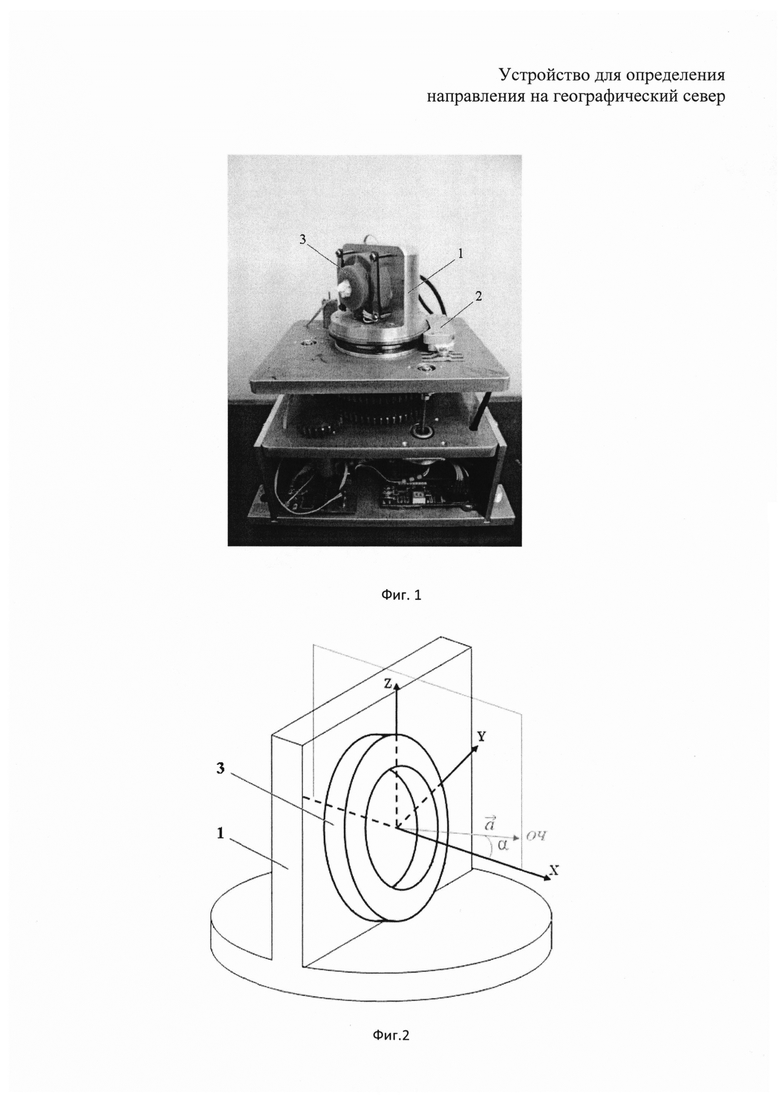
На фиг. 1 показан общий вид экспериментальной установки для определения направления на географический север на основе молекулярно-электронных измерителей углового ускорения. На установке присутствуют: подвижная платформа 1, датчик 2 скорости вращения платформы и молекулярно-электронный датчик 3 угловых движений, закрепленный на платформе 1.
На фиг. 2 показан молекулярно-электронный датчик 3 угловых движений, закрепленный на подвижной платформе 1, аналогично решению прототипа [11]. Введена система координат, вектор а направлен вдоль оси чувствительности датчика угловых движений, ось Z направлена вдоль оси вращения платформы, ось X ориентирована перпендикулярно оси вращения платформы так, что плоскость OXZ содержит вектор a. Ось Y дополняет систему координат до правой тройки. Введены следующие обозначения: α - угол между вектором а и направлением оси X.
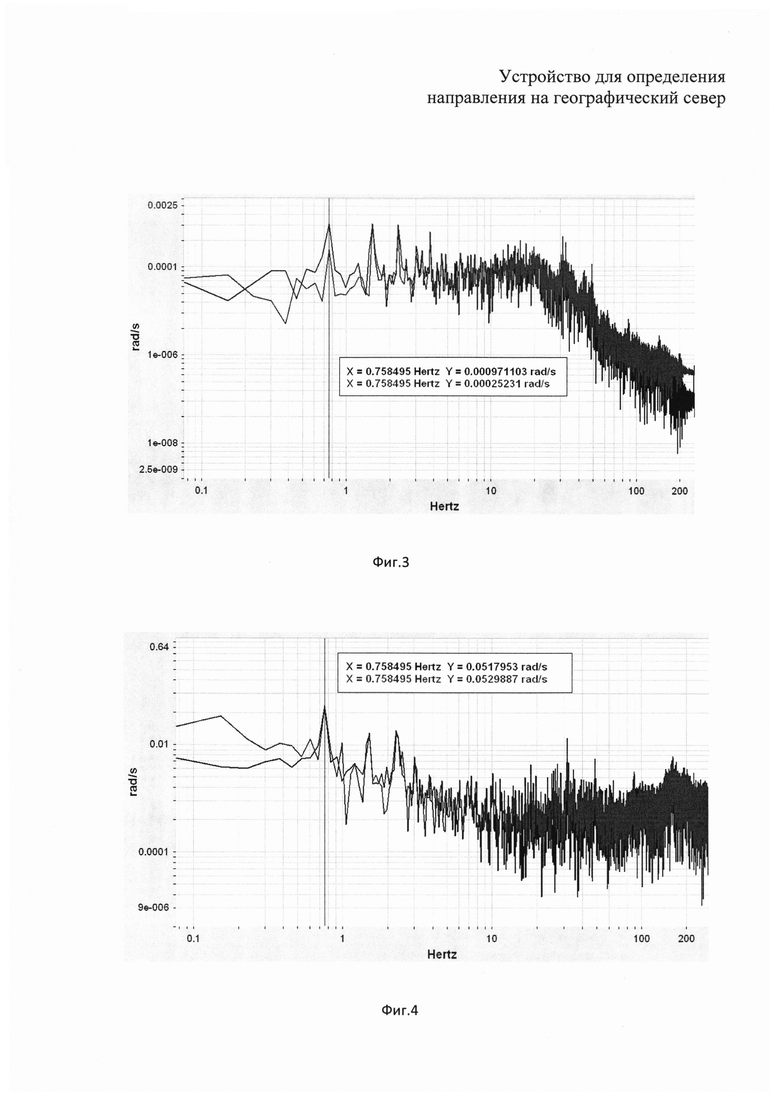
На фиг. 3 показаны амплитуды спектров сигналов молекулярно-электронного датчика, приведенные к размерности рад/с, при разных ориентациях оси чувствительности по отношению к оси вращения платформы. Красная кривая - ось чувствительности отклонена от положения ортогональности на малый угол. Синяя - ось чувствительности отклонена на больший угол.
На фиг. 4 показаны амплитуды спектров сигналов датчика скорости вращения платформы, характеризующейся неравномерностью вращения, соответствующие измерениям, приведенным на фиг. 3.
Для измерения мгновенной угловой скорости платформы 1 на площадку рядом с вращающейся платформой 1 установлен датчик 2 скорости вращения платформы, например магнитный, или, в другом варианте реализации, оптический энкодер, который способен определять положение платформы 1 во времени относительно положения старта. Производная показаний энкодера дает информацию о скорости вращения платформы 1 в течение времени. Параметры вращения платформы 1 задаются контроллером, управляемым программой, или оператором с компьютера. Данные, полученные с молекулярно-электронного датчика 3 и энкодера, обрабатываются и визуализируются на компьютере в реальном времени, позволяя наглядно контролировать неравномерность вращения платформы.
Устройство работает следующим образом. По команде контроллера задается вращение платформы 1, характеризующееся сильной неравномерностью (например, платформа периодически приводится во вращение из неподвижного состояния, а затем останавливается). В этом случае в уравнении (1) второе слагаемое является преобладающим. После вычисления преобразования Фурье, по отношению сигналов молекулярно-электронного датчика и энкодера на частоте ωср, соответствующей некоторой заранее выбранной рабочей частоте вращения платформы 1, корректируется положение оси чувствительности датчика к вектору угловой скорости вращения платформы путем последовательного наклона датчика 3 угловых движений в плоскости OXZ, минимизируя отношение сигналов  .
.
Из анализа фиг. 3 и фиг. 4 видно, что при корректировке положения оси чувствительности датчика угловых движений уменьшается амплитуда сигнала молекулярно-электронного датчика на частоте вращения платформы. Основываясь на производной сигнала энкодера, угол α находится из формулы  , следовательно, отношение сигнала датчика угловых движений к производной сигнала энкодера позволяет корректировать положение оси чувствительности датчика к вектору угловой скорости вращения платформы.
, следовательно, отношение сигнала датчика угловых движений к производной сигнала энкодера позволяет корректировать положение оси чувствительности датчика к вектору угловой скорости вращения платформы.
Однако при минимизации угла α невозможно добиться, чтобы α=0. Поэтому дополнительно к уменьшению паразитного сигнала его влияние можно уменьшить в ходе обработки данных. Кроме того, даже если путем выполнения указанной процедуры угол α удалось свести до очень малых значений, в процессе эксплуатации устройства он может измениться, например, под воздействием механических ударов или вибраций. Поэтому паразитный сигнал необходимо учесть при определении направления на географический север. Для этого непосредственно перед выполнением измерений платформа приводится в заведомо неравномерное вращение, и измеряется угол α как отношение сигнала молекулярно-электронного датчика угловых движений к сигналу производной сигнала энкодера на частоте, соответствующей средней угловой скорости платформы.
Далее измерения проводятся так же, как описано в [11-13], путем задания близкого к равномерному вращения платформы. Отличие состоит в том, что слагаемое Uдат(ωср)⋅sinα вычитается из сигнала молекулярно-электронного датчика с найденным значением угла α.
Таким образом, один из способов повышения точности с применением заявляемого технического решения в определении направления на географический север обеспечивается путем выставления оси чувствительности молекулярно-электронного датчика перпендикулярно вектору угловой скорости платформы, базируясь на показаниях датчика, измеряющего скорость вращения платформы во времени. Сохранившиеся после выполнения указанной процедуры ошибки учитываются путем вычитания паразитного сигнала из сигнала молекулярно-электронного датчика угловых движений. В сочетании с методом корректировки ошибок из [13] найденное решение позволяет существенно повысить точность измерений.
Источники информации
1. Ю.А. Лукомский, В.Г. Пешехонов, Д.А. Скороходов. Навигация и управление движением судов. СПб.: "Элмор", 2002. 360 с.
2. J. Reiner, М. Naroditsky, Patent No US 6502055 В1, G06F 15/00.
3. D.H. Titterton, J.L. Weston, "Strapdown inertial navigation technology. - 2nd ed.", ISBN 086341 358 7, British Library Cataloguing in Publication Data, 629. 1’351.
4. Б. Блажнов, Л. Нестерюк, В. Пешехонов, Л. Старосельцев, ЭЛЕКТРОНИКА: Наука, технология, Бизнес, 5/2001, с. 56-59.
5. А.С. Шабалина, Д.Л. Зайцев, Е.В. Егоров, И.В. Егоров, А.Н. Антонов, А.С. Бугаев, В.М. Агафонов, В.Г. Криштоп. Молекулярно-электронные преобразователи в современных измерительных приборах / Успехи современной радиоэлектроники, №9, 2014, с. 33-47.
6. Д.Л. Зайцев, В.М. Агафонов, А.С. Шабалина. Шумовые характеристики молекулярно-электронных измерителей угловых параметров движения / Приборостроение №7 (52), 2009.
7. Козлов В.А., Сафонов М.В. и др. "Молекулярно-электронное устройство для измерения угловых движений", патент РФ на изобретение №2324946, заявка №2005130308/28 (033961), 2005.
8. Зайцев Д.Л., Козлов В.А., Сафонов М.В. и др. "Способ изготовления электродного узла молекулярно-электронного измерителя линейных и угловых движений с низким уровнем собственных шумов", заявка на патент №2006131449/280 (034193), 2006.
9. Бугаев А.С., Сафонов М.В. "Молекулярно-электронное устройство для измерения механических движений", патент РФ на полезную модель №82862 U1, заявка №2008144490/22, 2008.
10. В.М. Агафонов, Е.В. Егоров, Д.Л. Зайцев, К.А. Неумоин, М.В. Сафонов. Исследование возможности использования молекулярно-электронного устройства / "Гироскопия и навигация" №3 (70), 2010.
11. Патент РФ на полезную модель №89895 «Устройство для определения направления на географический север», авторы: Агафонов В.М., Бугаев А.С., Зайцев Д.Л., Сафонов М.В., заявка №2009130794, опубл. 20.12.2009.
12. Патент US 20070095124 А1 "Inertialnorthfinder", авторы: Michael Naroditsky, заявка US 10577859, опубл. 03.05.2007.
13. Заявка №2012112374 от 02.04.2012 Способ определения направления на географический север с использованием сигнала молекулярно-электронного датчика угловых движений и компенсацией ошибок, связанных с влиянием линейных ускорений, авторы: Агафонов В.М., Антонов А.Н., Зайцев Д.Л.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ГЕОГРАФИЧЕСКИЙ СЕВЕР С ИСПОЛЬЗОВАНИЕМ МОЛЕКУЛЯРНО-ЭЛЕКТРОННОГО ДАТЧИКА УГЛОВЫХ СКОРОСТЕЙ И ДАТЧИКА УГЛА НАКЛОНА | 2014 |
|
RU2578049C1 |
| НЕМАГНИТНОЕ ИЗМЕРЕНИЕ АЗИМУТА С ИСПОЛЬЗОВАНИЕМ МЕТ ЭЛЕКТРОХИМИЧЕСКИХ ДАТЧИКОВ | 2010 |
|
RU2539123C2 |
| Способ изготовления преобразующего элемента молекулярно-электронного датчика движения | 2017 |
|
RU2659578C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ИСТИННОГО МЕРИДИАНА НАЗЕМНОГО ТРАНСПОРТА | 2005 |
|
RU2296299C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПРОЕКЦИЙ ВЕКТОРА УГЛОВОЙ СКОРОСТИ ВРАЩЕНИЯ ЗЕМЛИ ДЛЯ ОПРЕДЕЛЕНИЯ АЗИМУТА СТВОЛА СКВАЖИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1994 |
|
RU2085730C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2005 |
|
RU2285931C1 |
| Способ определения параметров ориентации объекта при помощи полуаналитической инерциальной навигационной системы с географической ориентацией осей четырехосной гироплатформы | 2022 |
|
RU2782334C1 |
| СПОСОБ КАЛИБРОВКИ ПАРАМЕТРОВ БЕСПЛАТФОРМЕННОГО ИНЕРЦИАЛЬНОГО ИЗМЕРИТЕЛЬНОГО МОДУЛЯ | 2004 |
|
RU2269813C2 |
| ЦИФРОВОЙ РЕГИСТРИРУЮЩИЙ МОДУЛЬ ДЛЯ ПОДВОДНЫХ ИССЛЕДОВАНИЙ | 2019 |
|
RU2724964C1 |
| Универсальный прецизионный мехатронный стенд с инерциальными чувствительными элементами для контроля гироскопических измерителей угловой скорости | 2022 |
|
RU2804762C1 |
Изобретение относится к устройствам для навигации и ориентации в пространстве и может быть использовано для определения направления на географический север. Устройство для определения направления на географический север содержит молекулярно-электронный датчик угловых движений, установленный на платформе, способной вращаться с угловой скоростью, изменяющейся по знаку и абсолютной величине, при этом устройство содержит датчик, измеряющий угловую скорость вращения платформы относительно неподвижного основания, и контроллер, управляющий вращением платформы и выполняющий совместную обработку данных молекулярно-электронного датчика угловых движений и датчика, измеряющего угловую скорость вращения платформы относительно неподвижного основания. Технический результат – повышение точности определения направления на географический север, повышение точности измерений. 4 з.п. ф-лы, 4 ил.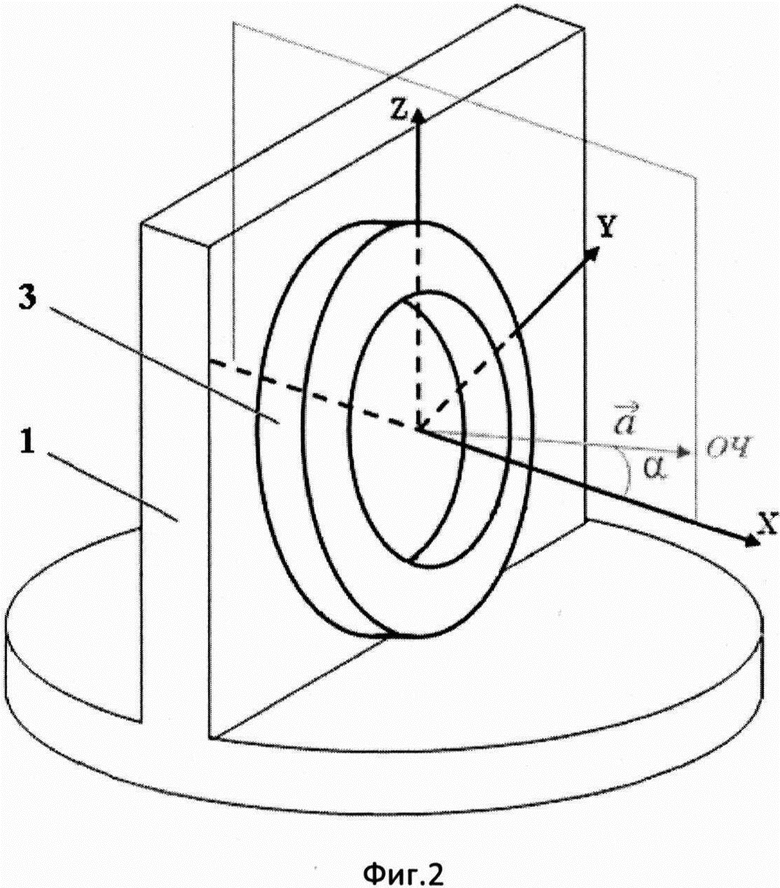
1. Устройство для определения направления на географический север, включающее молекулярно-электронный датчик угловых движений, установленный на платформе, способной вращаться с угловой скоростью, изменяющейся по знаку и абсолютной величине, отличающееся тем, что содержит датчик, измеряющий угловую скорость вращения платформы относительно неподвижного основания, и контроллер, управляющий вращением платформы и выполняющий совместную обработку данных молекулярно-электронного датчика угловых движений и датчика, измеряющего угловую скорость вращения платформы относительно неподвижного основания.
2. Устройство по п. 1, отличающееся тем, что в качестве датчика, измеряющего угловую скорость вращения платформы относительно неподвижного основания, использован магнитный энкодер углового положения платформы.
3. Устройство по п. 1, отличающееся тем, что в качестве датчика, измеряющего угловую скорость вращения платформы относительно неподвижного основания, использован оптический энкодер углового положения платформы.
4. Устройство по п. 1, отличающееся тем, что в качестве датчика, измеряющего угловую скорость вращения платформы относительно неподвижного основания, использован угловой акселерометр.
5. Устройство по п. 1, отличающееся тем, что в качестве датчика, измеряющего угловую скорость вращения платформы относительно неподвижного основания, использован миниатюрный гироскоп.
| В.М | |||
| Агафонов, Е.В | |||
| Егоров и др | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Паровоз для отопления неспекающейся каменноугольной мелочью | 1916 |
|
SU14A1 |
| УКВ РАДИОУСТРОЙСТВО | 1940 |
|
SU62916A1 |
| УГЛОВОЙ АКСЕЛЕРОМЕТР | 1986 |
|
SU1501726A1 |
| RU 2014121005 A, 10.12.2015 | |||
| Устройство для предварительной смазки двигателя внутреннего сгорания | 1950 |
|
SU89895A2 |
| RU 2012112374 A, 20.10.2013 | |||
| МОБИЛЬНЫЙ ОБЩЕСТВЕННЫЙ ТУАЛЕТ | 2011 |
|
RU2495981C2 |

