ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к способу приведения в движение сочлененного гусеничного транспортного средства в соответствии с ограничительной частью п. 1 формулы изобретения.
УРОВЕНЬ ТЕХНИКИ
Существуют сочлененные гусеничные транспортные средства, которые имеют переднюю и заднюю части транспортного средства, которые управляемо соединены посредством механизма управления. Транспортное средство содержит один или более приводных двигателей, которые через трансмиссию распределяют мощность соответствующей гусенице транспортного средства. Выходные валы трансмиссии приводят ведущие валы передней и задней частей транспортного средства с одинаково высокой скоростью вращения.
В документе EP 0424345 A1 описано сочлененное транспортное средство и способ облегчения поступательного движения сочлененного транспортного средства. Когда водитель находится в передней части транспортного средства, водителю трудно контролировать перемещения задней части транспортного средства, особенно когда транспортное средство совершает поворот. Благодаря снабжению транспортного средства дифференциальной передачей, большая мощность привода может быть распределена к передней части транспортного средства по сравнению с задней частью транспортного средства, что означает, что задняя часть транспортного средства будет следовать направлению движения передней части транспортного средства.
Когда сочлененные гусеничные транспортные средства указанного выше типа продвигаются по мягкой поверхности грунта, такой как снег или болотистый грунт, мощность привода соответствующей части транспортного средства определяется максимально доступной мощностью привода, которую могут произвести гусеницы относительно грунта, минус противоположные силы сопротивления приводу. Мощность привода, которую могут произвести гусеницы, генерируется, среди прочего, зависимостью между проскальзыванием гусениц и углублением гусениц в поверхность грунта. Эта зависимость является разной для разных поверхностей грунта и разных конфигураций транспортного средства, таких как конфигурация гусениц и вес транспортного средства.
Когда сочлененное гусеничное транспортное средство движется по мягкой поверхности грунта, гусеницы задней части транспортного средства движутся по поверхности, уплотненной гусеницами передней части транспортного средства. Если передние и задние гусеницы гусеничного транспортного средства будут вращаться с одинаковой скоростью, что является обычным для сочлененных гусеничных транспортных средств обычной конструкции, то передние и задние гусеницы будут работать с проскальзыванием, что не оптимально относительно эффективности и мощности привода транспортного средства для передней или для задней части транспортного средства.
Когда известные сочлененные гусеничные транспортные средства поворачивают, возникает подобный недостаток. Когда механизм управления между передней и задней частью транспортного средства спроектирован таким образом, что точка управления вынесена вперед, задняя часть транспортного средства будет двигаться с меньшим радиусом, чем передняя часть транспортного средства в ходе поворота. При повороте задняя часть транспортного средства, таким образом, толкает переднюю часть транспортного средства, так как привод на ведущие колеса, в случае с обычно спроектированными приводами на ведущие колеса, жестко соединен, и трансмиссии полуосей и гусеницы обеих частей транспортного средства вращаются с одинаковой скоростью. Это означает, что гусеницы имеют тенденцию потери сцепления с поверхностью, когда транспортное средство поворачивает на скользких и мягких поверхностях грунта. В то же время, нагрузка на гусеницы высока, что означает увеличенный износ гусениц и привода на ведущие колеса и увеличенное сопротивление качению гусениц.
ЗАДАЧИ ИЗОБРЕТЕНИЯ
Одной задачей настоящего изобретения является создание сочлененного гусеничного транспортного средства, которое приводится в движение с оптимальной эффективностью и мощностью привода на разных поверхностях грунта.
Другой задачей изобретения является создание сочлененного гусеничного транспортного средства, которое демонстрирует стабильность при повороте транспортного средства, чтобы таким образом снижать риск буксования транспортного средства и понизить износостойкость и сопротивление качению гусениц транспортного средства.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Указанные выше задачи решены посредством создания способа согласно п. 1 формулы изобретения.
Так как передние и задние гусеницы вращаются с разными скоростями, передние и задние гусеницы будут работать с проскальзыванием, которое оптимально относительно эффективности и мощности привода транспортного средства. Одновременно можно получить сочлененное гусеничное транспортное средство, которое показывает стабильность при повороте транспортного средства, чтобы, таким образом, снижать риск буксования транспортного средства и уменьшить износ и сопротивление качению гусениц транспортного средства. Оптимизация эффективности и уменьшение сопротивления качению также приводит к уменьшению в энергоемкости транспортного средства и к уменьшению расхода топлива и более продолжительной работе на бензине, дизельном топливе или электроэнергии. Проходимость транспортного средства также увеличивается.
Согласно одному варианту осуществления изобретения, устройство регулирования управляет первой и второй скоростями ведущих валов транспортного средства как функцией измеренной скорости транспортного средства. Оптимальное проскальзывание гусениц, таким образом, может быть задано для данной поверхности и скорости, с которой движется транспортное средство.
Согласно другому варианту осуществления изобретения, устройство регулирования управляет первой и второй скоростью ведущих валов транспортного средства как функцией измеренного вращающего момента соответствующего ведущего вала. Оптимальное проскальзывание гусениц, таким образом, может быть задано для данной поверхности и вращающего момента, который генерируется на ведущих валах транспортного средства.
Согласно другому варианту осуществления изобретения, устройство регулирования управляет первой и второй скоростью как функцией измеренной наименьшей разности эффекта мощности привода между передним и задним ведущими валами. Благодаря измерению разности эффекта мощности привода каждого соответствующего ведущего вала, можно получить оптимальное проскальзывание гусениц, когда разность эффекта мощности привода между передним и задним ведущими валами наименьшая.
Согласно другому варианту осуществления изобретения, передний ведущий вал вращается со скоростью, которая является кратным числом скорости заднего ведущего вала. Выбирая число из предварительно заданных кратных чисел, можно получать оптимальную эффективность и мощность привода для разных рабочих условий.
Согласно другому варианту осуществления изобретения, кратное число скорости заднего ведущего вала может быть выбрано вручную в зависимости от типа поверхности грунта. Выбирая между многими предварительно заданными кратными числами, персонал транспортного средства может вручную регулировать транспортное средство, которое будет приводиться в движение с оптимальной эффективностью и мощностью привода на разных поверхностях.
Согласно другому варианту осуществления изобретения, первая и вторая скорости являются функцией или пропорциональны взаимному углу передней и задней частей транспортного средства относительно друг друга. Передние и задние гусеницы, таким образом, будут вращаться со скоростью, которая оптимальна относительно уменьшения риска буксования транспортного средства и уменьшения износа и сопротивления качению гусениц транспортного средства.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Изобретение описано более подробно далее со ссылками на прилагаемые чертежи, показывающие предпочтительные варианты осуществления изобретения. На чертежах:
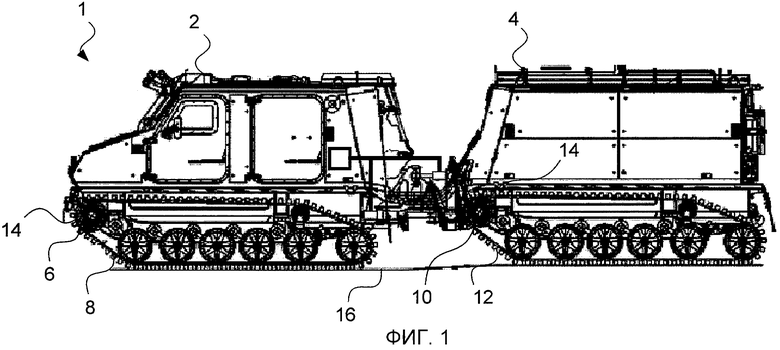
фиг. 1 - вид сбоку сочлененного гусеничного транспортного средства;
фиг. 2 - вид в плане сочлененного гусеничного транспортного средства, имеющего механический привод на ведущие колеса;
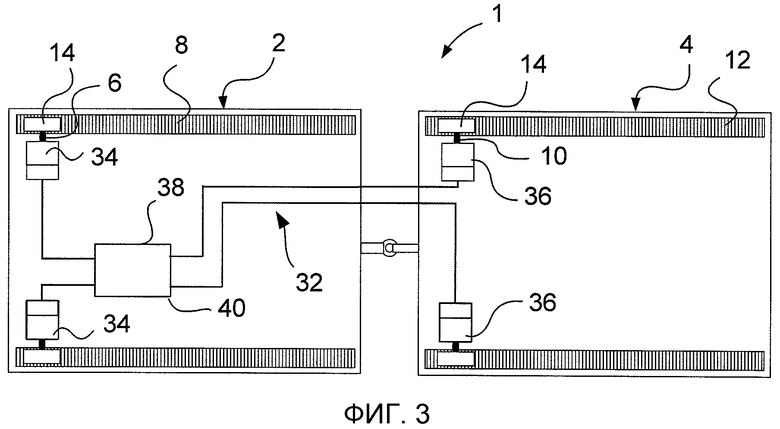
фиг. 3 - вид в плане сочлененного гусеничного транспортного средства, имеющего электрический или гидравлический привод на ведущие колеса;
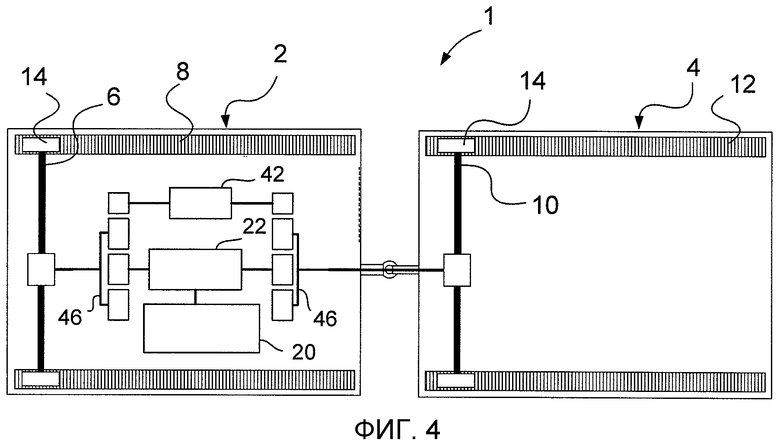
фиг. 4 - вид в плане сочлененного гусеничного транспортного средства, имеющего раздаточную коробку, снабженную механизмом регулирования;
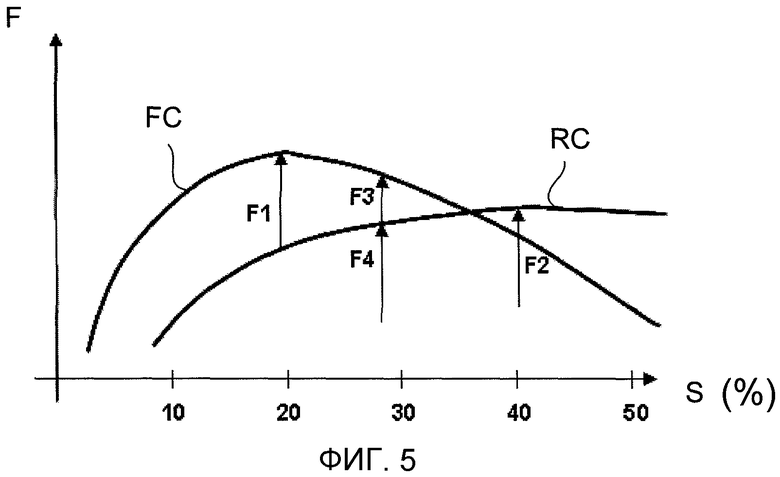
фиг. 5 - первый график, показывающий проскальзывание, как функцию мощности привода;
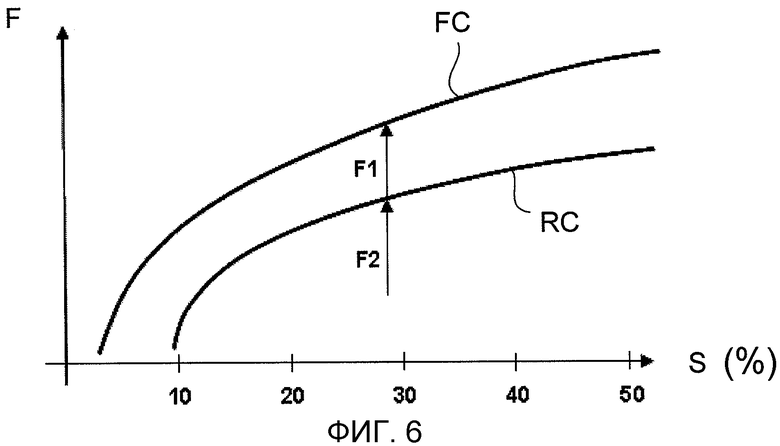
фиг. 6 - второй график, показывающий проскальзывание, как функцию мощности привода;
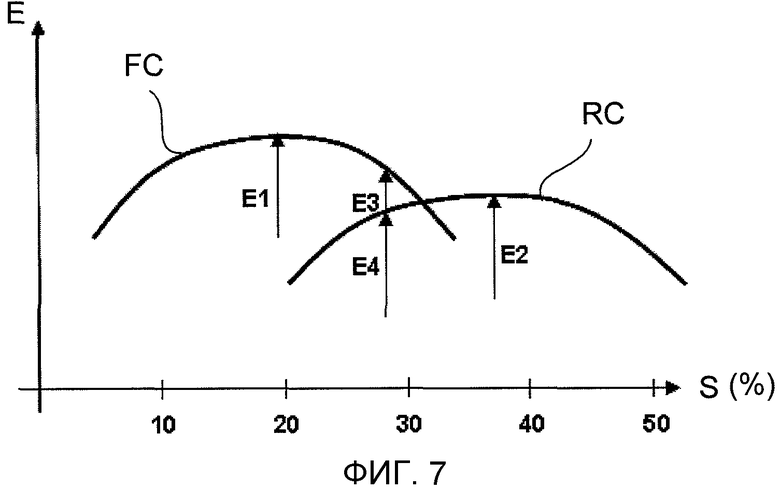
фиг. 7 - третий график, показывающий проскальзывание, как функцию эффективности; и
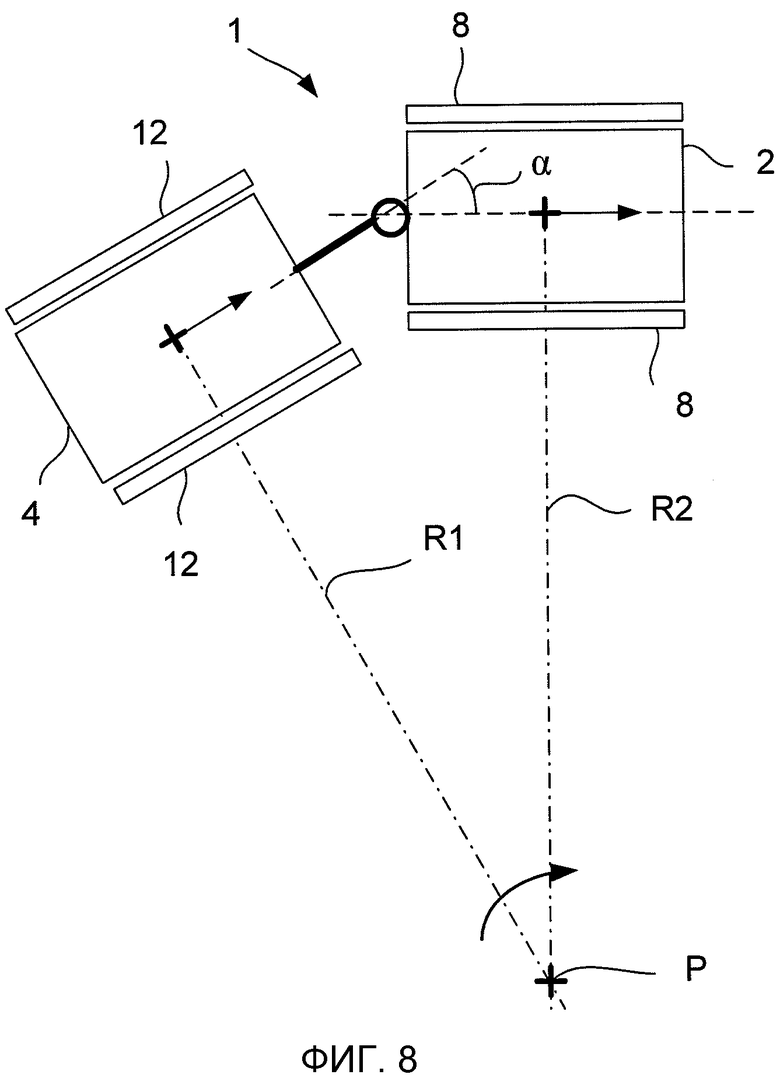
фиг. 8 - вид в плане сочлененного гусеничного транспортного средства, которое совершает поворот.
СПОСОБ (СПОСОБЫ) ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
На фиг. 1 показано сочлененное гусеничное транспортное средство 1, имеющее переднюю и заднюю части 2, 4 транспортного средства, содержащие передний ведущий вал 6, который вращает передние гусеницы 8 на передней части 2 транспортного средства, и задний ведущий вал 10, который вращает задние гусеницы 12 на задней части 4 транспортного средства. Передний ведущий вал 6 расположен в передней части 2 транспортного средства, а задний ведущий вал 12 расположен в задней части 4 транспортного средства. На соответствующем ведущем валу 6, 10 установлены ведущие колеса 14, которые входят в зацепление с гусеницами 8, 12 и вызывают их вращение, таким образом приводя в движение транспортное средство 1 со скоростью относительно поверхности 16 грунта.
Когда сочлененное гусеничное транспортное средство 1 движется по мягкой поверхности 16 грунта, гусеницы 12 задней части 4 транспортного средства движутся по поверхности 16, уплотненной гусеницами передней части 2 транспортного средства. Если передние и задние гусеницы 8 и 12 гусеничного транспортного средства 1 вращаются с одинаковой скоростью, что общепринято в обычно сконструированных сочлененных гусеничных транспортных средствах 1, передние и задние гусеницы 8 и 12 будут работать с проскальзыванием, что не оптимально относительно эффективности и мощности привода транспортного средства 1. Мощность привода, которую могут произвести гусеницы 8, 12, определяется, среди прочего, зависимостью между проскальзыванием гусениц и углублением гусениц 8, 12 в поверхность грунта. Эта зависимость является разной для разных поверхностей 16 грунта и разных конфигураций транспортных средств, таких как конфигурация гусениц и вес транспортного средства. Под проскальзыванием гусениц подразумевается буксование гусениц 8, 12 относительно поверхности 16 грунта. Проскальзывание гусениц выражено в процентах. При 0%-м проскальзывании гусениц буксование гусениц 8, 12 относительно поверхности 16 грунта не происходит.
В соответствии с настоящим изобретением, передний ведущий вал 6 вращается с первой скоростью, и задний ведущий вал 10 вращается со второй скоростью, при этом первая и вторая скорости являются разными таким образом, что передние и задние гусеницы 8 и 12 вращаются с разной скоростью. Передние и задние гусеницы 8 и 12 могут, таким образом, работать с проскальзыванием, которое оптимально относительно эффективности и мощности привода транспортного средства 1. Это означает также, что мощность привода может увеличиваться, и проходимость по мягкой поверхности 16 грунта может улучшаться.
На фиг. 2 показан вид в плане сочлененного гусеничного транспортного средства 1, имеющего механический привод 18 на ведущие колеса. Приводной двигатель 20, который может быть двигателем внутреннего сгорания или электродвигателем, соединен через раздаточную коробку 22 с передним и задним ведущими валами 6 и 10. На раздаточную коробку 22 воздействует устройство 24 регулирования, которое регулирует раздаточную коробку 22 таким образом, что передний ведущий вал 6, через первый карданный вал 26, вращается с первой скоростью, и таким образом, что задний ведущий вал 10, через второй карданный вал 28, вращается со второй скоростью. В свете указанного выше, первая и вторая скорости будут разными таким образом, что передние и задние гусеницы 8 и 12 вращаются с разной скоростью, и таким образом, что транспортное средство 1 приводится в движение с оптимальной эффективностью и мощностью привода на поверхности 12 грунта.
Согласно одному варианту осуществления изобретения, устройство 24 регулирования управляет первой и второй скоростью ведущих валов 6, 10 транспортного средства 1 как функция измеренной скорости транспортного средства 1. Оптимальное проскальзывание гусениц, таким образом, может быть задано для данной поверхности 16 грунта и скорости, с которой движется транспортное средство 1.
Согласно другому варианту осуществления изобретения, устройство 24 регулирования управляет первой и второй скоростью ведущих валов 6, 10 транспортного средства 1 как функцией измеренного вращающего момента соответствующего ведущего вала 6, 10. Оптимальное проскальзывание гусениц, таким образом, может быть задано для данной поверхности грунта и вращающего момента, который генерируется на ведущих валах 6, 10 транспортного средства 1.
Согласно другому варианту осуществления изобретения, устройство 24 регулирования управляет первой и второй скоростями как функцией измеренной наименьшей разности эффекта мощности привода между передним и задним ведущими валами 6 и 10. Благодаря измерению разности эффекта мощности привода между каждым соответствующим ведущим валом 6, 10, можно получать оптимальное проскальзывание гусениц, когда разность эффекта мощности привода между передним и задним ведущими валами 6 и 10 является наименьшей.
Скорость транспортного средства 1, вращающий момент ведущих валов 6, 10 и наименьшая разность эффекта мощности привода между передним и задним ведущими валами 6 и 10 могут быть измерены одним или более датчиков 30, расположенных на транспортном средстве 1, при этом датчики передают сигналы устройству 24 регулирования, которое, таким образом, регулирует раздаточную коробку 22 в соответствии с величинами сигналов.
Вместо или в дополнение к определению датчиком 30 некоторых параметров, которые вызывают регулирование устройством 24 регулирования раздаточной коробки 22, передний ведущий вал 6 может вращаться со скоростью, которая является кратным числом скорости заднего ведущего вала 10. Кратные числа могут быть выбраны вручную в зависимости от типа поверхности 16 грунта, по которому движется транспортное средство 1. Выбирая между многими заданными кратными числами, персонал транспортного средства 1 может вручную регулировать транспортное средство 1 для движения с оптимальной эффективностью и мощностью привода на разных поверхностях.
На фиг. 3 показан вид в плане сочлененного гусеничного транспортного средства 1, имеющего электрический или гидравлический привод 32 на ведущие колеса, который может быть электрическим и/или гидравлическим. Пара первых двигателей 34 приводит передний ведущий вал 6, и пара вторых двигателей 36 приводит задний ведущий вал 10. Каждый двигатель 34, 36, следовательно, соединен с соответствующим ведущим колесом 14. Двигатели 34, 36 могут быть электрическими или гидравлическими. Когда двигатели 34, 36 являются электрическими, они питаются током через кабели, соединенные с аккумулятором 38. Когда двигатели 34, 36 являются гидравлическими, они приводятся в действие гидравлическим двигателем 40. Транспортное средство, соответствующее фиг. 3, может приводиться в действие в соответствии с принципом, который описан выше в связи с фиг. 2.
На фиг. 4 показан вид в плане сочлененного гусеничного транспортного средства 1, имеющего раздаточную коробку 22, снабженную механизмом 42 регулирования. Приводной двигатель 20 приводит первый и второй ведущие валы через раздаточную коробку, при этом механизм 42 регулирования соединен с планетарной передачей 46, расположенной на соответствующем выходном валу 44 раздаточной коробки 22, чтобы управлять скоростью от раздаточной коробки 22 к переднему и заднему ведущим валам 6, 10 посредством механизма 42 регулирования. Механизм 42 регулирования может быть составлен электродвигателем, которым управляет программное обеспечение механически-электрическим способом. Механизм 42 регулирования также может быть составлен управляемым программным обеспечением электродвигателем.
На фиг. 5 показан первый график, показывающий проскальзывание, как функцию мощности привода на некоторой поверхности грунта. Первая кривая FC представляет первую часть 2 транспортного средства, и вторая кривая RC представляет заднюю часть 4. Можно видеть, что передняя часть 2, в этом случае, имеет более высокую возможную доступную мощность F1 привода и с меньшим проскальзыванием, чем мощность F2 привода задней части 4. В соответствии с настоящим изобретением, транспортное средство 1 будет развивать более высокую мощность F1+F2 привода, чем F3+F4 согласно обычным решениям. Следовательно, F1+F2>F3+F4, как можно видеть по диаграмме с фиг. 5.
На фиг. 6 показан второй график, показывающий проскальзывание, как функцию мощности привода, где доступные мощности F1 и F2 привода передней и задней частей 2 и 4 транспортного средства увеличиваются с увеличенным проскальзыванием, и также, что передняя часть 2 имеет более высокую возможную доступную мощность привода, чем мощность F2 привода задней части 4. Первая кривая FC представляет первую часть 2 транспортного средства, и вторая кривая RC представляет заднюю часть 4. Так как ведущие валы обычных сочлененных гусеничных транспортных средств должны вращаться с одинаковой скоростью, ни одна из гусениц частей транспортного средства не будет работать в их оптимальном рабочем режиме, в котором достигается максимальная мощность привода.
На фиг. 7 показан третий график, показывающий проскальзывание, как функцию эффективности E. На фиг. 7 можно видеть, что эффективность для поступательного движения соответствующей части 2, 4 транспортного средства имеет максимум при некотором проскальзывании. Первая кривая FC представляет первую часть 2 транспортного средства, и вторая кривая RC представляет заднюю часть 4. На графике можно видеть, что транспортное средство 1, имеющее принцип привода в соответствии с настоящим изобретением, может достигать более высокой эффективности E1+E2, чем обычные решения E3+E4. Следовательно, E1+E2>E3+E4, как можно видеть на фиг. 7.
Согласно другому варианту осуществления изобретения, первая и вторая скорости ведущих валов 6 и 10 транспортного средства являются функцией или пропорциональны взаимному углу α передней и задней частей 2 и 4 транспортного средства относительно друг друга. На фиг. 8 показан вид в плане сочлененного гусеничного транспортного средства 1, поворачивающего вокруг точки P. На фиг. 8 можно видеть, что задняя часть 4 транспортного средства движется с радиусом R1 поворота, который меньше, чем радиус R2 поворота, с которым совершает поворот передняя часть 2 транспортного средства. Следовательно, R1<R2. Если гусеницы 8, 12 передней и задней частей 2 и 4 транспортного средства вращались бы с одинаково высокой скоростью, то задняя часть 4 транспортного средства толкала бы переднюю часть 2 транспортного средства в ходе поворота. Это означает, что гусеницы 8, 12 имеют тенденцию терять сцепление с поверхностью 16 грунта, когда транспортное средство 1 поворачивает на скользких и мягких поверхностях грунта 16, таким образом, что возникает нежелательное проскальзывание. Одновременно нагрузка на привод на ведущие колеса высокая, что приводит к увеличенному износу гусениц 8, 12 и увеличенному сопротивлению качению гусениц 8, 12. Благодаря тому, что передняя и задняя части 2 и 4 транспортного средства работают с разными скоростями, эффект толкания задней частью 4 транспортного средства передней части 2 транспортного средства в ходе поворота устранен. Передние и задние гусеницы 8 и 12 будут, таким образом, вращаться со скоростью, которая оптимальна относительно снижения риска буксования транспортного средства 1 и уменьшения износа и сопротивления качению гусениц 8, 12 транспортного средства 1.
Различные варианты осуществления изобретения, которые описаны выше, могут быть взаимно скомбинированы и могут использоваться одновременно на одном и том же транспортном средстве 1.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТНОЕ СРЕДСТВО ОСОБО ВЫСОКОЙ ПРОХОДИМОСТИ НА ГУСЕНИЧНОМ ХОДУ | 2004 |
|
RU2333130C2 |
| ВОЕННАЯ ГУСЕНИЧНАЯ МАШИНА | 2004 |
|
RU2279628C2 |
| ГИБРИДНАЯ ЭЛЕКТРИЧЕСКАЯ РАБОЧАЯ МАШИНА | 2008 |
|
RU2490161C2 |
| Модуль колёсно-гусеничного движителя и шасси с двумя модулями | 2022 |
|
RU2784225C1 |
| ПЛАВАЮЩЕЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2001 |
|
RU2201353C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО ВЫСОКОЙ ПРОХОДИМОСТИ | 2002 |
|
RU2314961C2 |
| Гусеничная машина | 2019 |
|
RU2711105C1 |
| Гусеничная машина | 2019 |
|
RU2710511C1 |
| КОТЛОВАННАЯ МАШИНА | 2011 |
|
RU2485253C1 |
| УПРАВЛЯЕМЫЙ ГУСЕНИЧНЫЙ ХОДОВОЙ МЕХАНИЗМ | 2015 |
|
RU2679792C2 |
Изобретение относится к способу приведения в движение сочлененного гусеничного транспортного средства (1). Транспортное средство снабжено, по меньшей мере, передней и задней частями (2, 4) и содержит передний ведущий вал (6), который вращает передние гусеницы (8) на передней части (2) транспортного средства; задний ведущий вал (10), который вращает задние гусеницы (12) на задней части (4) транспортного средства. По меньшей мере, один двигатель (20, 34, 36) вращает соответствующий передний и задний ведущий вал (6, 10), чтобы таким образом приводить в движение транспортное средство (1) со скоростью относительно поверхности (16) грунта. Передний ведущий вал (6) вращается с первой скоростью, а задний ведущий вал (10) вращается со второй скоростью, причем первая и вторая скорости являются разными таким образом, что передние и задние гусеницы (8, 12) вращаются с разной скоростью. Достигается увеличение проходимости транспортного средства. 9 з.п. ф-лы, 8 ил.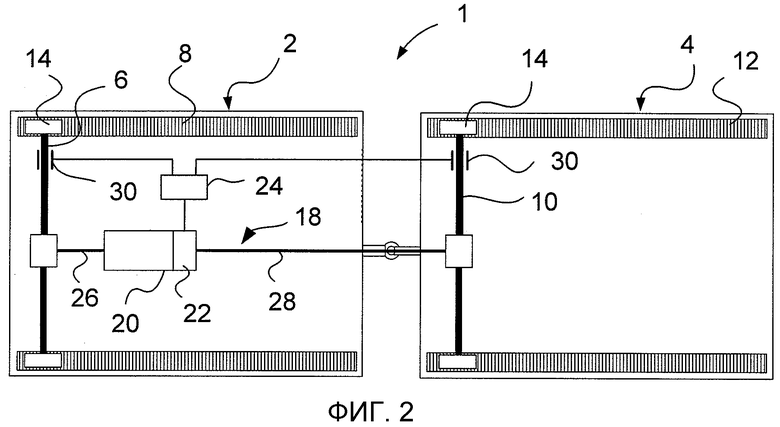
1. Способ приведения в движение сочлененного гусеничного транспортного средства (1), снабженного, по меньшей мере, передней и задней частями (2, 4) транспортного средства и содержащего передний ведущий вал (6), который вращает передние гусеницы (8) на передней части (2) транспортного средства; и задний ведущий вал (10), который вращает задние гусеницы (12) на задней части (4) транспортного средства, причем передний ведущий вал (6) расположен в передней части (2) транспортного средства, а задний ведущий вал (10) расположен в задней части транспортного средства (4); по меньшей мере, один двигатель (20, 34, 36), который вращает соответствующий передний и задний ведущие валы (6, 10), чтобы таким образом приводить в движение транспортное средство (1) со скоростью относительно поверхности (16) грунта, при этом передний ведущий вал (6) вращают с первой скоростью, а задний ведущий вал (10) вращают со второй скоростью, причем первая и вторая скорости являются разными, так что передние и задние гусеницы (8, 12) вращаются с разной скоростью, отличающийся тем, что первую и вторую скорости ведущих валов (6, 10) транспортного средства выбирают таким образом, что транспортное средство (1) приводится в движение с оптимальной эффективностью и мощностью привода на поверхности (16) грунта, по сравнению со случаем, когда ведущие валы (6, 10) транспортного средства (1) вращаются с одинаковой скоростью.
2. Способ по п.1, отличающийся тем, что устройство (24) регулирования управляет первой и второй скоростью ведущих валов (6, 10) транспортного средства (1) как функцией измеренной скорости транспортного средства (1).
3. Способ по п.1 или 2, отличающийся тем, что устройство (24) регулирования управляет первой и второй скоростью ведущих валов (6, 10) транспортного средства (1) как функцией измеренного вращающего момента соответствующего ведущего вала (6, 10).
4. Способ по п.1 или 2, отличающийся тем, что устройство (24) регулирования управляет первой и второй скоростью как функцией измеренной наименьшей разности эффекта мощности привода между передним и задним ведущими валами (6, 10).
5. Способ по п.1, отличающийся тем, что передний ведущий вал (6) вращают со скоростью, которая является кратным числом скорости заднего ведущего вала (10).
6. Способ по п.5, отличающийся тем, что кратное число выбирают вручную в зависимости от типа поверхности (16) грунта.
7. Способ по п.1, отличающийся тем, что первая и вторая скорости ведущих валов (6, 10) транспортного средства (1) являются функцией взаимного угла (α) передней и задней частей (2, 4) транспортного средства относительно друг друга.
8. Способ по п.1 или 2, отличающийся тем, что двигатель является приводным двигателем (20), который приводит первый и второй ведущие валы (6, 10) через раздаточную коробку (22), и механизм (42) регулирования соединен с планетарной передачей (46), расположенной на соответствующем выходном валу (44) от раздаточной коробки (22) для управления скоростью от раздаточной коробки (22) к переднему и заднему ведущим валам (6, 10) посредством механизма регулирования (42).
9. Способ по п.1 или 2, отличающийся тем, что передний ведущий вал (6) приводят первым двигателем (34), а задний ведущий вал (10) приводят вторым двигателем (36).
10. Способ по п.9, отличающийся тем, что как первый, так и второй двигатели (34, 36) являются электродвигателем.
| US 4645023 A, 24.02.1987 | |||
| WO 2009059698 A2, 14.05.2009 | |||
| БОЕВАЯ СОЧЛЕНЕННАЯ МАШИНА | 2003 |
|
RU2238509C1 |
| DE 4223296 A1, 20.01.1994 | |||

