Изобретение относится к области разработки систем наведения (СН) ракет и может быть использовано в комплексах ПТУР и ЗУР.
Одной из задач, решаемых при разработке СН вращающихся по углу крена ракет с релейным приводом рулевого органа (ПРО), является увеличение точности наведения на цель.
Известен способ наведения вращающейся ракеты с релейным ПРО (прототип), реализованный в устройстве формирования релейных сигналов управления вращающейся по углу крена ракетой, включающий формирование модулированного излучения на пусковом устройстве, прием излучения на ракете и выработку сигналов управления в вертикальной hy и в горизонтальной hz плоскостях, формирование релейных трехпозиционных периодических по углу γ крена ракеты сигналов с(γ) и s(γ), сдвинутых друг относительно друга на угол π/2, формирование релейного двухпозиционного сигнала V посредством определения знака суммы сигналов управления, промодулированных периодическими по углу крена сигналами, и сигнала линеаризации Uл1 с амплитудой Ал, синфазного с периодическими по углу крена сигналами, преобразование полученного релейного сигнала управления в отклонение рулевого органа ракеты (патент RU №2184921, МПК7 F41G 7/00, F42B 15/01, 03.04.00).
Одноканальный сигнал управления V, поступающий на релейный ПРО, формируется согласно этому способу в соответствии с зависимостью
V=sign(hуc(γ)+hzs(γ)+Uл1)
и обеспечивает управление на основе широтно-импульсной модуляции, при которой информация о величине команд заключена в соотношении длительностей верхнего и нижнего уровней сигнала, которым соответствует положение рулей ракеты на одном или другом упоре.
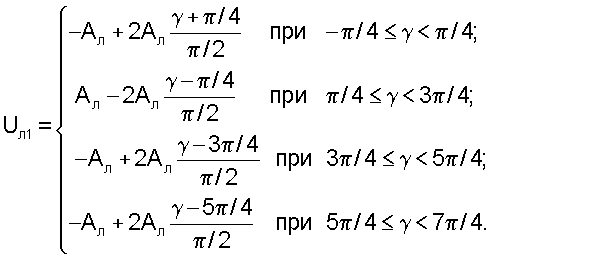
Вид сигнала Uл1 на каждом периоде вращения ракеты по крену определяется зависимостью:
Комплексная амплитуда  первой гармоники разложения в ряд Фурье сформированного выходного сигнала V определяется выражением:
первой гармоники разложения в ряд Фурье сформированного выходного сигнала V определяется выражением:
где  ;
;
 - проекции комплексной амплитуды на оси декартовой системы координат, представляющие собой результирующие команды управления в вертикальной и горизонтальной плоскости.
- проекции комплексной амплитуды на оси декартовой системы координат, представляющие собой результирующие команды управления в вертикальной и горизонтальной плоскости.
В соответствии с разложением в ряд проекции  имеют вид:
имеют вид:

где ky,z - нормированные по амплитуде линеаризации сигналы управления в вертикальной и горизонтальной плоскостях:
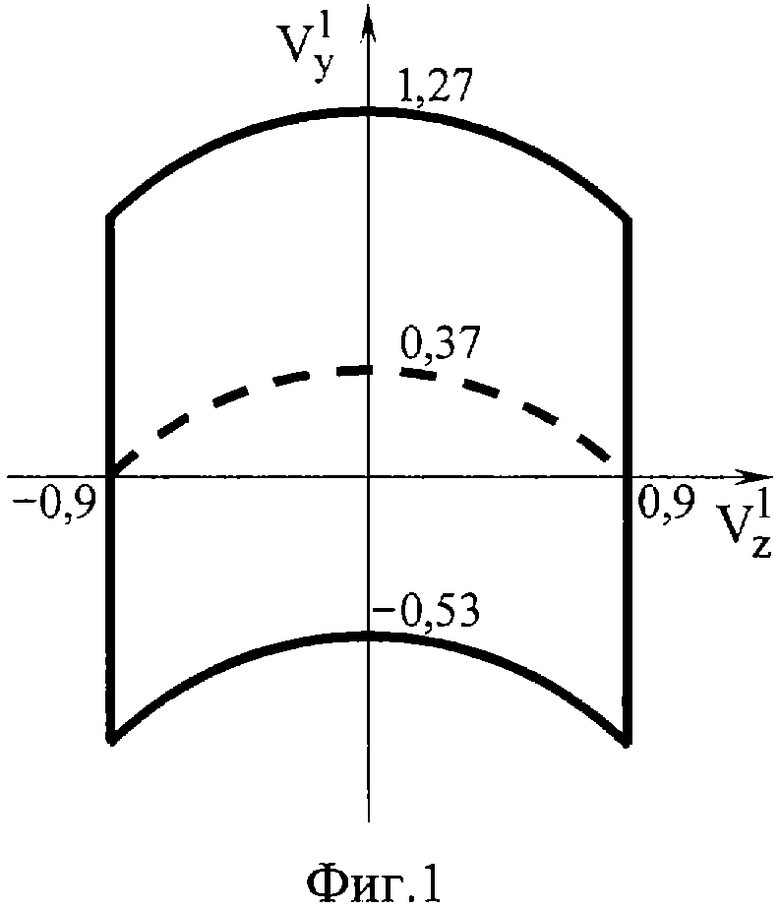
Результирующая команда на рули в вертикальной плоскости  при таком способе зависит не только от нормированного сигнала управления ky в вертикальной плоскости, но и от величины нормированного сигнала управления kz в горизонтальной плоскости. Границы поля возможных команд управления, именуемого в дальнейшем «криволинейным», приведены на фиг.1. Оно представляет собой совокупность дуг, соответствующих фиксированным значениям вертикальной результирующей команды при изменении значений горизонтальной команды.
при таком способе зависит не только от нормированного сигнала управления ky в вертикальной плоскости, но и от величины нормированного сигнала управления kz в горизонтальной плоскости. Границы поля возможных команд управления, именуемого в дальнейшем «криволинейным», приведены на фиг.1. Оно представляет собой совокупность дуг, соответствующих фиксированным значениям вертикальной результирующей команды при изменении значений горизонтальной команды.
Диапазон изменения результирующей команды на ПРО составляет:
в вертикальной плоскости ( ):
):
от минус 0,53 до 1,27 (при нулевой команде в горизонтали),
от минус 0,9 до 0,9 (при максимальной команде в горизонтали);
в горизонтальной плоскости ( ):
):
от минус 0,9 до 0,9.
В «криволинейном» поле формируется дополнительная команда вверх
(она соответствует штриховой линии на фиг.1), что необходимо для управления ракетами с дефицитом располагаемой перегрузки, поскольку в вертикальной плоскости ракета должна развивать ускорение, компенсирующее ускорение от силы тяжести. Под располагаемой перегрузкой ракеты понимается наибольшая перегрузка (ускорение) ракеты, которую она может развить при максимальном отклонении рулей (Дмитриевский А.А. Внешняя баллистика. - М.: Машиностроение, 1979, с.126). В области отрицательных команд (команд вниз) при таком способе принудительно реализуется ограничение (нижняя граница поля на фиг.1).
Наибольшая дополнительная прибавка команды по вертикали  в «криволинейном» поле обеспечивается при малых сигналах управления в горизонтальной плоскости, а при максимальных (или близких к ним) сигналах управления в горизонтали эффект прироста команды в вертикальной плоскости отсутствует (или невелик).
в «криволинейном» поле обеспечивается при малых сигналах управления в горизонтальной плоскости, а при максимальных (или близких к ним) сигналах управления в горизонтали эффект прироста команды в вертикальной плоскости отсутствует (или невелик).
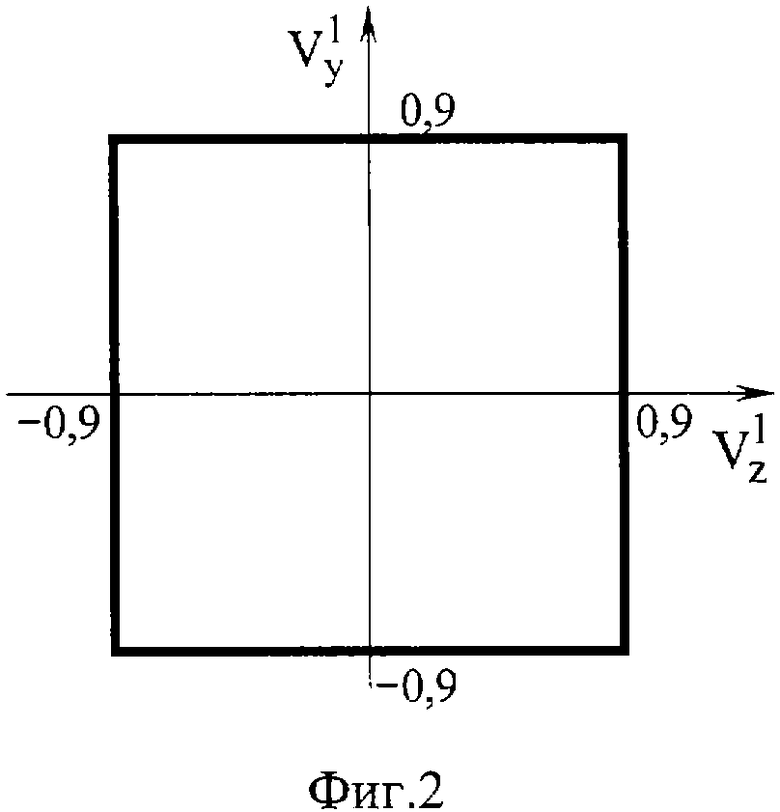
Границы поля возможных команд управления, которое может быть получено при линеаризации ПРО в известном способе сигналом вида Uл согласно зависимости
представлены на фиг.2. Такое поле будем именовать в дальнейшем «квадратным». Оно представляет собой совокупность прямых, параллельных оси абсцисс, соответствующих фиксированным значениям вертикальной команды, и, в отличие от «криволинейного» поля, независимых от значений горизонтальной команды. В соответствии с разложением в гармонический ряд результирующие команды на ПРО в вертикальной и горизонтальной плоскостях  при этом имеют вид
при этом имеют вид
и формируются независимо друг от друга каждая в своей плоскости.
Диапазон изменения результирующих команд в обеих плоскостях для «квадратного» поля управления составляет: от минус 0,9 до 0,9. В «квадратном» поле дополнительная команда вверх отсутствует.
Для ракет с низкой начальной скоростью на участке переходного процесса при их встреливании в луч величина горизонтальных сигналов управления определяется наличием или отсутствием возмущающих факторов:
начальных возмущений (например, при выходе из контейнера, при раскрытии оперения);
воздействия бокового ветра.
Вследствие разброса величин горизонтальных команд и, соответственно, величины дополнительной прибавки вертикальной команды трубка возможного рассеивания траекторий управляемого полета в вертикальной плоскости для способа с «криволинейным» полем расширяется по сравнению со способом с «квадратным» полем управления. В свою очередь, способ с «квадратным» полем управления не обеспечивает прирост вертикальной команды, что необходимо при дефиците располагаемой перегрузки ракеты.
Ограничение команд вниз, реализуемое в «криволинейном» поле команд управления, на участке переходного процесса может ухудшать качество наведения.
Таким образом, недостатком способа с «криволинейным» полем возможных команд управления для определенного класса ракет (например, ракет с низкой начальной скоростью) является:
формирование команды в вертикальной плоскости в зависимости от величины команды в горизонтальной плоскости;
ограничение вертикальных команд вниз.
Задачей предлагаемого изобретения является расширение (по сравнению с известными способами) границ поля возможных команд управления в вертикальной плоскости независимо от наличия и отсутствия возмущающих факторов в горизонтальной плоскости, что повышает точность наведения ракет, в том числе, и в условиях дефицита располагаемой перегрузки.
Для решения поставленной задачи необходимо:
обеспечить возможность формирования максимальных команд управления в вертикальной плоскости не только вверх (как в способе с «криволинейным» полем команд), но и вниз;
обеспечить независимое формирование команд управления в вертикальной и горизонтальной плоскостях (как в способе с «квадратным» полем команд).
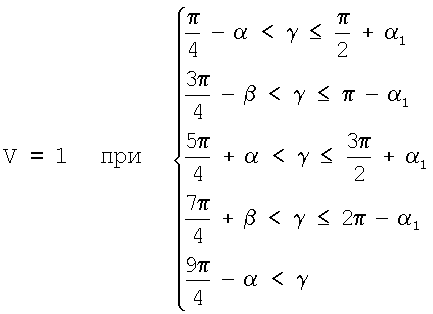
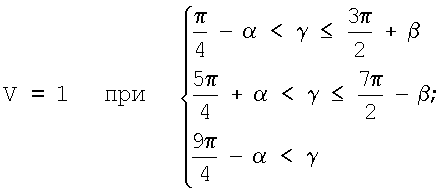
В первом варианте предлагаемого способа наведения поставленная задача решается за счет того, что по сравнению с известным способом наведения вращающейся ракеты с релейным ПРО, включающим формирование модулированного излучения на пусковом устройстве, прием излучения на ракете и выработку сигналов управления в вертикальной hy и в горизонтальной hz плоскостях, формирование релейных трехпозиционных периодических по углу γ крена ракеты сигналов с(γ) и s(γ), сдвинутых друг относительно друга на угол π/2, формирование релейного двухпозиционного сигнала V посредством определения знака суммы сигналов управления, промодулированных периодическими по углу крена сигналами, и сигнала линеаризации с амплитудой Ал, синфазного с периодическими по углу крена сигналами, преобразование полученного релейного сигнала управления в отклонение рулевого органа, релейный двухпозиционный сигнал V формируют на каждом периоде вращения ракеты по крену из сигналов управления в вертикальной hy и горизонтальной hz плоскостях по следующим правилам:
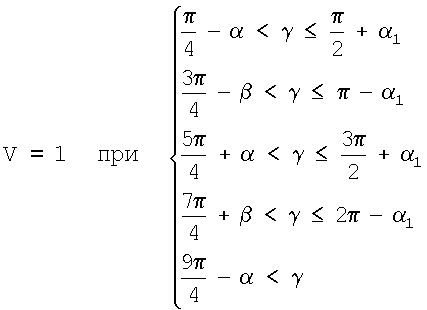
иначе V=-1,
где
γ - угол крена ракеты, изменяющийся на периоде вращения по крену в диапазоне от  до
до  , начало отсчета которого обновляется при изменении значения сигнала с(γ) с «0» на «1»;
, начало отсчета которого обновляется при изменении значения сигнала с(γ) с «0» на «1»;

Во втором варианте предлагаемого способа наведения поставленная задача решается за счет того, что по сравнению с известным способом наведения вращающейся ракеты с релейным ПРО, включающим формирование модулированного излучения на пусковом устройстве, прием излучения на ракете и выработку сигналов управления в вертикальной hy и в горизонтальной hz плоскостях, формирование релейных трехпозиционных периодических по углу у крена ракеты сигналов с(γ) и s(γ), сдвинутых друг относительно друга на угол π/2, формирование релейного двухпозиционного сигнала V посредством определения знака суммы сигналов управления, промодулированных периодическими по углу крена сигналами, и сигнала линеаризации с амплитудой Ал, синфазного с периодическими по углу крена сигналами, преобразование полученного релейного сигнала управления в отклонение рулевого органа, релейный двухпозиционный сигнал V формируют на каждом периоде вращения ракеты по крену из сигналов управления в вертикальной hy и горизонтальной hz плоскостях по следующим правилам:
иначе V=-1,
где
γ - угол крена ракеты, изменяющийся на периоде вращения по крену в диапазоне от  до
до  , начало отсчета которого обновляется при изменении значения сигнала с(γ) с «0» на «1»;
, начало отсчета которого обновляется при изменении значения сигнала с(γ) с «0» на «1»;
Сформированный сигнал V (в первом варианте - на учетверенной частоте вращения ракеты по крену, во втором варианте - на удвоенной) поступает на релейный ПРО, осуществляющий отработку этого сигнала, т.е. перекладку рулей в соответствии с изменением его знака. Вращающаяся по углу крена ракета демодулирует отклонение рулей, в результате чего в каждой из плоскостей создается управляющий момент, соответствующий исходным сигналам управления hy,z.
Выбор первого или второго вариантов формирования управляющего сигнала V обусловлен его отработкой ПРО (при заданном быстродействии) с минимальными искажениями, что, в свою очередь, определяется соотношением периода вращения по крену и времени срабатывания ПРО. При достаточном быстродействии ПРО предпочтительным является первый вариант, т.к. формирование управляющего сигнала более высокой частоты минимизирует методическую колебательную составляющую углов атаки ракеты. При недостаточном быстродействии ПРО используется второй вариант. Для конкретных характеристик ракет и ПРО может применяться чередование первого и второго вариантов на различных участках полета.
В соответствии с разложением релейного сигнала V в ряд Фурье результирующие команды на рули в вертикальной и горизонтальной плоскостях для первого и второго вариантов предлагаемого способа имеют вид:
Графические материалы заявки представлены на фиг.1-7.
На фиг.1 приведено «криволинейное» поле возможных команд управления, а на фиг.2 - «квадратное» поле возможных команд управления для известного способа.
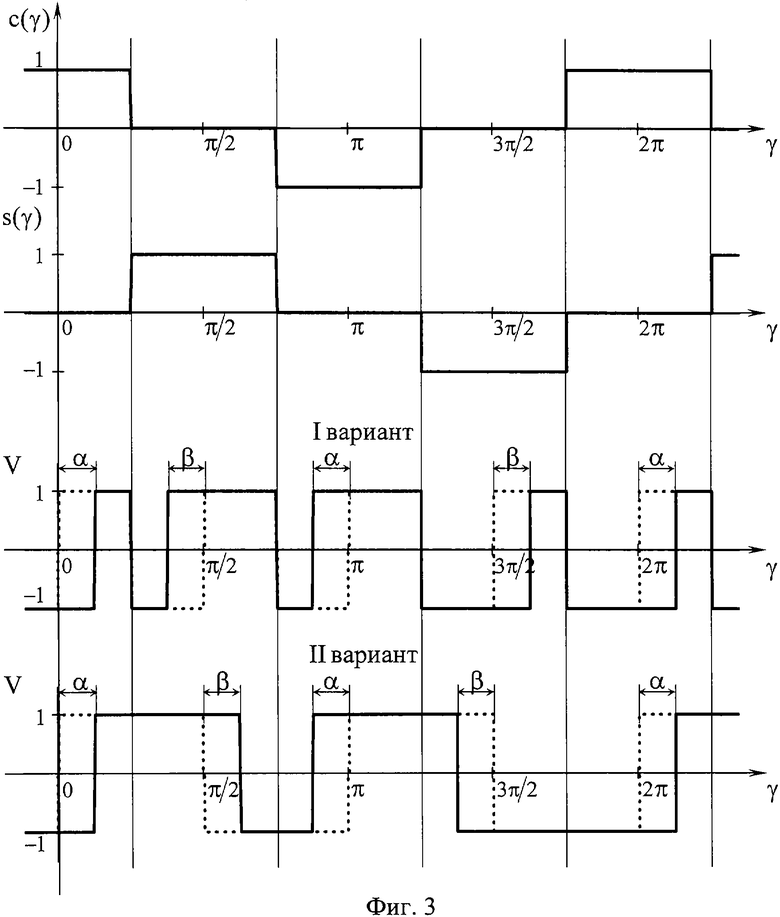
На фиг.3 представлен процесс формирования релейного двухпозиционного сигнала V для первого и второго вариантов предлагаемого способа при сигналах управления 
 (соответственно
(соответственно  ) и
) и  (соответственно
(соответственно  ). Штриховая линия на фиг.3 определяет вид сигнала V при нулевых значениях α и β.
). Штриховая линия на фиг.3 определяет вид сигнала V при нулевых значениях α и β.
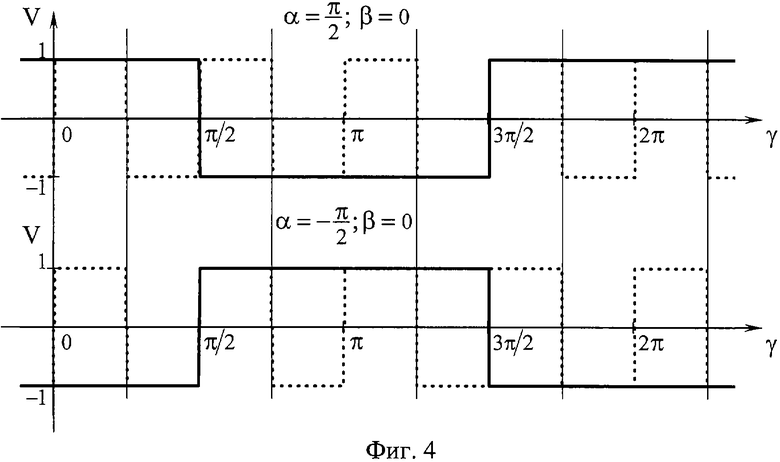
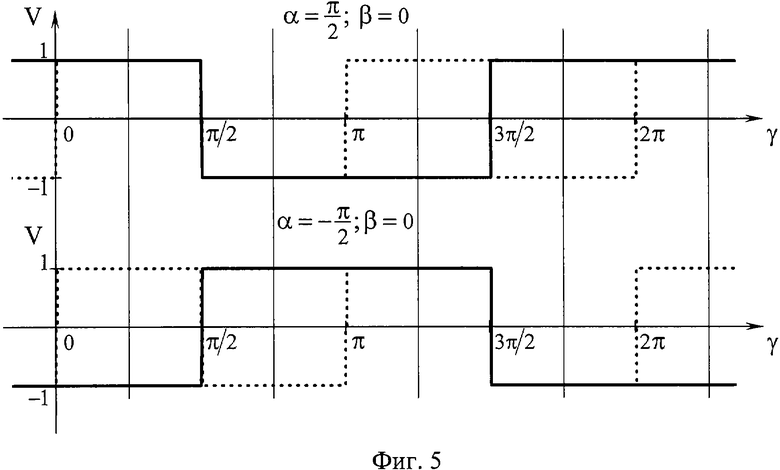
Виды релейного двухпозиционного сигнала V при максимальных сигналах управления в вертикальной плоскости
или
и нулевом сигнале управления
в горизонтальной плоскости представлены на фиг.4 и 5: для первого варианта предлагаемого способа - на фиг.4, для второго варианта - на фиг.5. Штриховые линии на фиг.4, 5 соответствуют виду сигнала V при нулевых значениях α и β.
Как видно из фиг.4 и 5, обеспечение максимальных команд вверх или вниз осуществляется за счет максимально возможной длительности уровней сигнала V, что определяет нахождение руля за период вращения по крену в течение половины периода на одном упоре и половины периода на другом упоре. Величина максимальной вертикальной команды при этом составляет:
вверх
 ,
,
вниз
 .
.
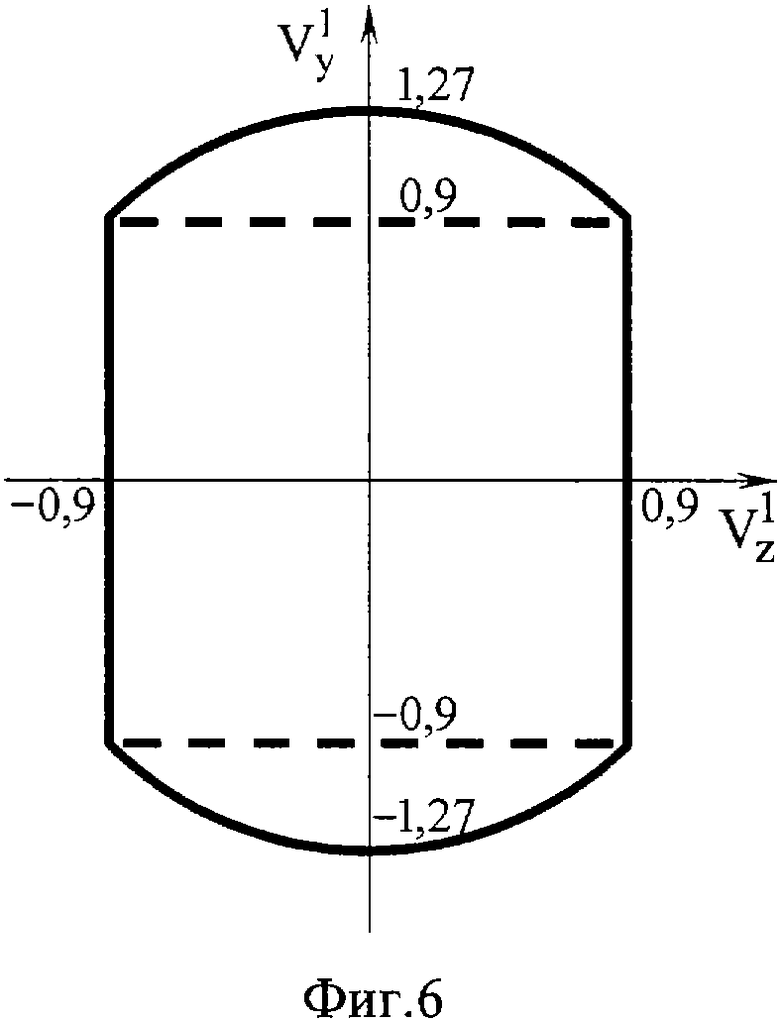
На фиг.6 сплошными линиями изображено поле возможных команд управления для предлагаемого способа, одинаковое для первого и второго вариантов (внутри зоны, ограниченной сверху и снизу штриховыми линиями, формирование команд соответствует известному способу с «квадратным» полем управления).
Зависимость величины результирующей команды на рули в вертикальной плоскости  от величины сигнала управления в этой же плоскости
от величины сигнала управления в этой же плоскости  (сигнал управления в горизонтальной плоскости нулевой) представлена на фиг.7: сплошной линией - для поля управления первого и второго вариантов предлагаемого способа (одинаковое), пунктирной - для «криволинейного» поля управления, штрих пунктирной - для «квадратного» поля управления.
(сигнал управления в горизонтальной плоскости нулевой) представлена на фиг.7: сплошной линией - для поля управления первого и второго вариантов предлагаемого способа (одинаковое), пунктирной - для «криволинейного» поля управления, штрих пунктирной - для «квадратного» поля управления.
Для оценки эффективности вариантов предлагаемого способа рассмотрим принцип формирования выходного сигнала в зависимости от величин сигналов управления.
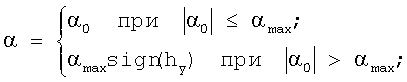
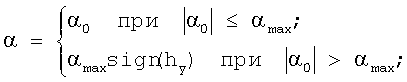
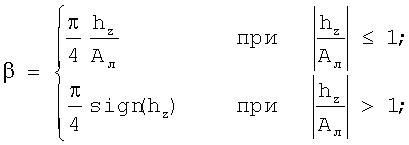
Параметры α и β определяются величинами сигналов управления соответственно в вертикальной и горизонтальной плоскостях. При нулевых командах управления в обеих плоскостях (α=0 и β=0) каждый фронт переключения сигнала V, определяемый величиной сигнала управления, находится на середине соответствующей четверти оборота по крену (на фиг.3, 4, 5 этот случай изображен штриховой линией), и при отработке такого сигнала руль в течение периода вращения по крену будет находиться на одном и другом упоре равное время. При ненулевых сигналах управления этот фронт смещается в ту или другую сторону в зависимости от знака сигнала, причем величина угловых смещений относительно нулевого фронта характеризуется параметрами α и β.
Диапазон возможных значений α и β в первом и втором вариантах предлагаемого способа составляет:
в вертикальной плоскости (α): от -αmax до +αmax (αmax изменяется в пределах от  до
до  );
);
в горизонтальной плоскости (β): от  до
до  .
.
Диапазон изменения результирующей команды в первом и втором вариантах предлагаемого способа составляет:
в вертикальной плоскости (): от минус 1,27 до 1,27;
в горизонтальной плоскости ( ): от минус 0,9 до 0,9.
): от минус 0,9 до 0,9.
Преимуществом первого и второго вариантов предлагаемого способа по сравнению с известным способом является сочетание в себе положительных качеств «квадратного» и «криволинейного» полей команд управления:
результирующие команды управления в вертикальной и горизонтальной плоскостях формируются независимо друг от друга и практически пропорционально сигналам управления hy, hz, но в отличие от «квадратного» поля в более широком (в  раз) диапазоне для вертикальной плоскости (см. фиг.7);
раз) диапазоне для вертикальной плоскости (см. фиг.7);
максимальная команда может быть обеспечена не только вверх (как для «криволинейного» поля), но и вниз.
Применение первого и второго вариантов предлагаемого способа позволяет повысить точность наведения вращающихся по углу крена одноканальных ракет с релейными ПРО.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ФОРМИРОВАНИЯ РЕЛЕЙНЫХ СИГНАЛОВ УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА РАКЕТОЙ | 2000 |
|
RU2184921C2 |
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ С РЕЛЕЙНЫМ ПРИВОДОМ РУЛЕВОГО ОРГАНА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2310151C2 |
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ С РЕЛЕЙНЫМ ПРИВОДОМ РУЛЕВОГО ОРГАНА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2375667C1 |
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ С РЕЛЕЙНЫМ ПРИВОДОМ РУЛЕВОГО ОРГАНА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2532993C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ ВОКРУГ ПРОДОЛЬНОЙ ОСИ РАКЕТОЙ | 2006 |
|
RU2321814C1 |
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2486428C1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ И СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2527391C2 |
| СПОСОБ ФОРМИРОВАНИЯ КОМАНДЫ УПРАВЛЕНИЯ ОДНОКАНАЛЬНОЙ ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА РАКЕТОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2011 |
|
RU2473864C1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ И СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2536838C2 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ ВОКРУГ ПРОДОЛЬНОЙ ОСИ ДВУХКАНАЛЬНОЙ РАКЕТОЙ | 2012 |
|
RU2511610C1 |

Изобретение относится к области разработки систем наведения ракет и может быть использовано в комплексах ПТУР и ЗУР. Способ наведения вращающейся ракеты включает формирование модулированного излучения на пусковом устройстве, прием излучения на ракете и выработку сигналов управления в вертикальной и в горизонтальной плоскостях, формирование релейных трехпозиционных периодических по углу крена ракеты сигналов, формирование релейного двухпозиционного сигнала. Релейный двухпозиционный сигнал формируют на каждом периоде вращения ракеты по крену из сигналов управления в вертикальной и горизонтальной плоскостях по приведенным зависимостям. Технический результат - повышение точности наведения вращающихся по углу крена ракет с релейными приводами рулевых органов. 2 н.п. ф-лы, 7 ил.
иначе V=-1,
где γ - угол крена ракеты, изменяющийся на периоде вращения по крену в диапазоне от  до
до  , начало отсчета которого обновляется при изменении значения сигнала с(γ) с «0» на «1»;
, начало отсчета которого обновляется при изменении значения сигнала с(γ) с «0» на «1»;
иначе V=-1,
гдеγ - угол крена ракеты, изменяющийся на периоде вращения по крену в диапазоне от  до
до  , начало отсчета которого обновляется при изменении значения сигнала с(γ) с «0» на «1»;
, начало отсчета которого обновляется при изменении значения сигнала с(γ) с «0» на «1»;
| УСТРОЙСТВО ФОРМИРОВАНИЯ РЕЛЕЙНЫХ СИГНАЛОВ УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА РАКЕТОЙ | 2000 |
|
RU2184921C2 |
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД ВРАЩАЮЩЕЙСЯ ПО КРЕНУ УПРАВЛЯЕМОЙ РАКЕТЫ | 2000 |
|
RU2184926C2 |
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД УПРАВЛЯЕМОГО СНАРЯДА | 1997 |
|
RU2114387C1 |
| US 5248114 А, 28.09.1993 | |||
| СПОСОБ ПОВЫШЕНИЯ ПРОДУКТИВНОСТИ МОЛОДНЯКА КРОЛИКОВ | 2018 |
|
RU2694626C1 |

