Изобретение относится к способам сигнализационного прикрытия локального участка местности с дорогой и может быть использовано в случаях применения проводноволнового или сейсмического средств обнаружения (СО) с протяженной линейной частью (ПЛЧ) для сигнализационного прикрытия дороги и путей ее обхода.
Как правило, маршрут своего движения нарушитель строит с учетом существующей сети дорог на местности. Он двигается или по самой дороге, или вдоль нее на безопасном удалении от нее (в обход) [1]. Поэтому сигнализационному прикрытию дорог и путей их обхода уделяется значительное внимание. Во многом успех задержания нарушителя зависит от знания силами реагирования места нарушения локального участка местности с дорогой (движение обнаруженного нарушителя по дороге или в обход нее).
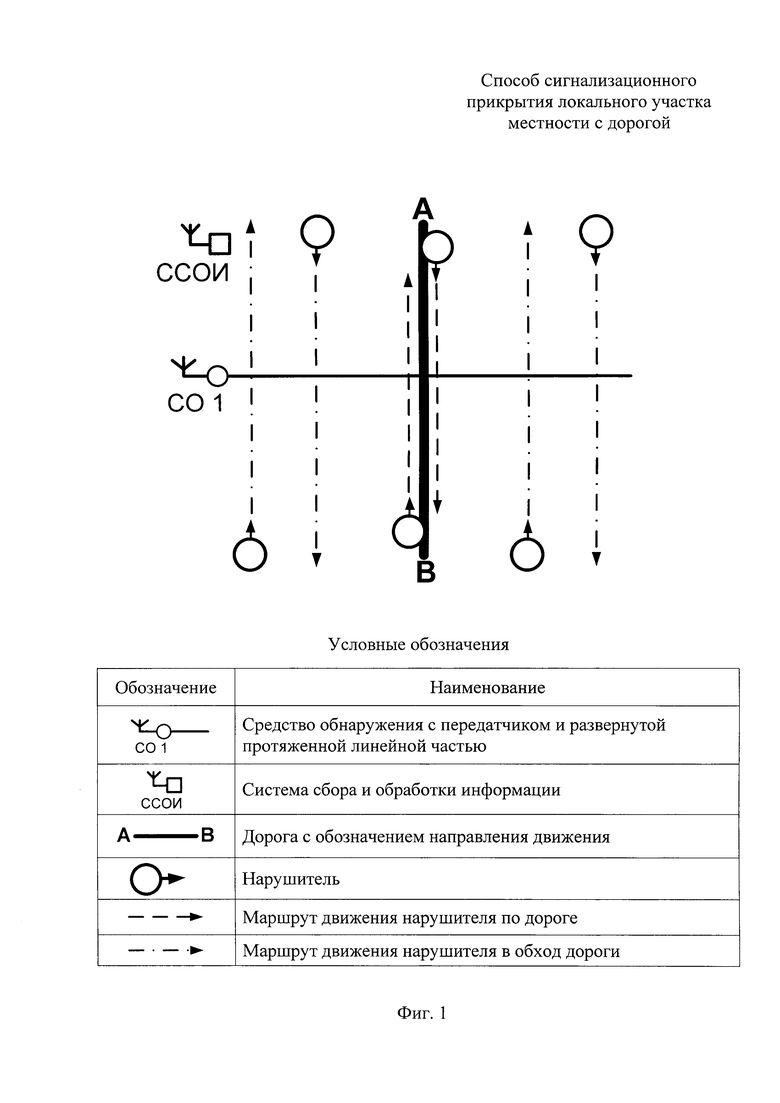
Известен способ сигнализационного прикрытия локального участка местности с дорогой, заключающийся в развертывании ПЛЧ СО так, чтобы она лежала поперек дороги и путей ее обхода справа и слева. СО формирует сигнал тревоги при пересечении нарушителем его ПЛЧ (фиг. 1). Этот способ позволяет только обнаружить нарушителя без уточнения места нарушения.
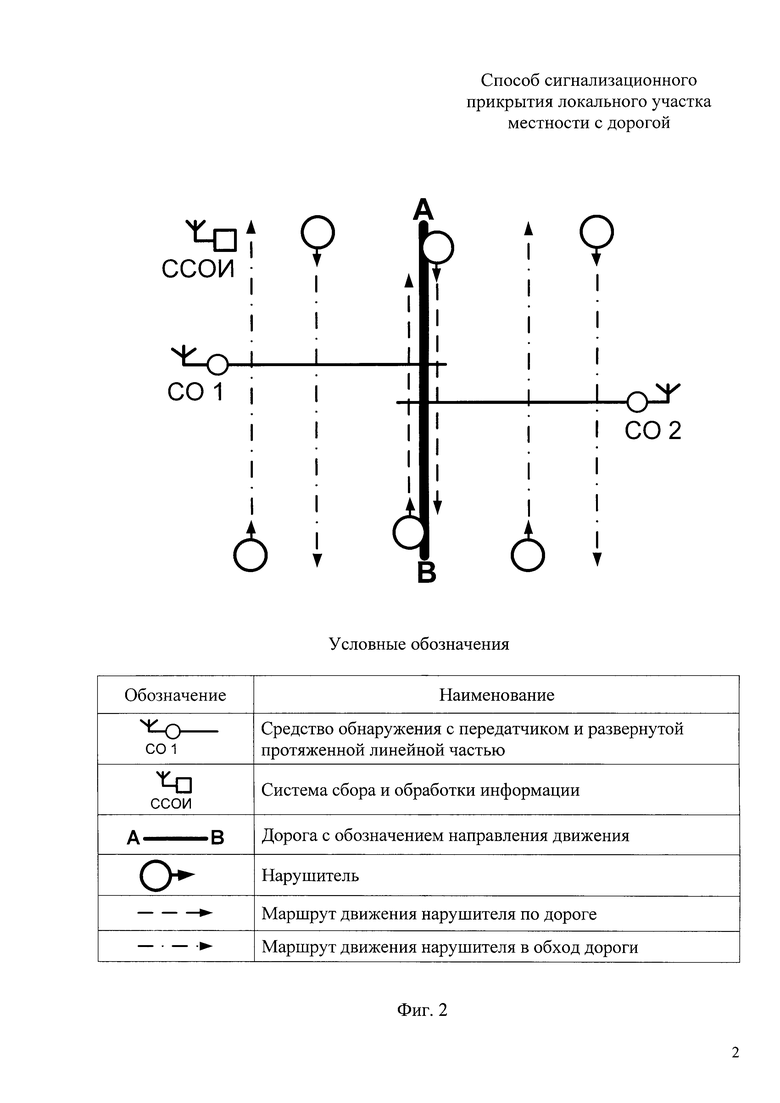
В известных способах, в которых нарушитель обнаруживается и определяется место нарушения, применяются не менее двух СО. (фиг. 2, 3) [2, 3].
Целью изобретения является получение возможности определения места нарушения локального участка местности с дорогой (движение обнаруженного нарушителя по дороге или в обход нее) с применением только одного СО.
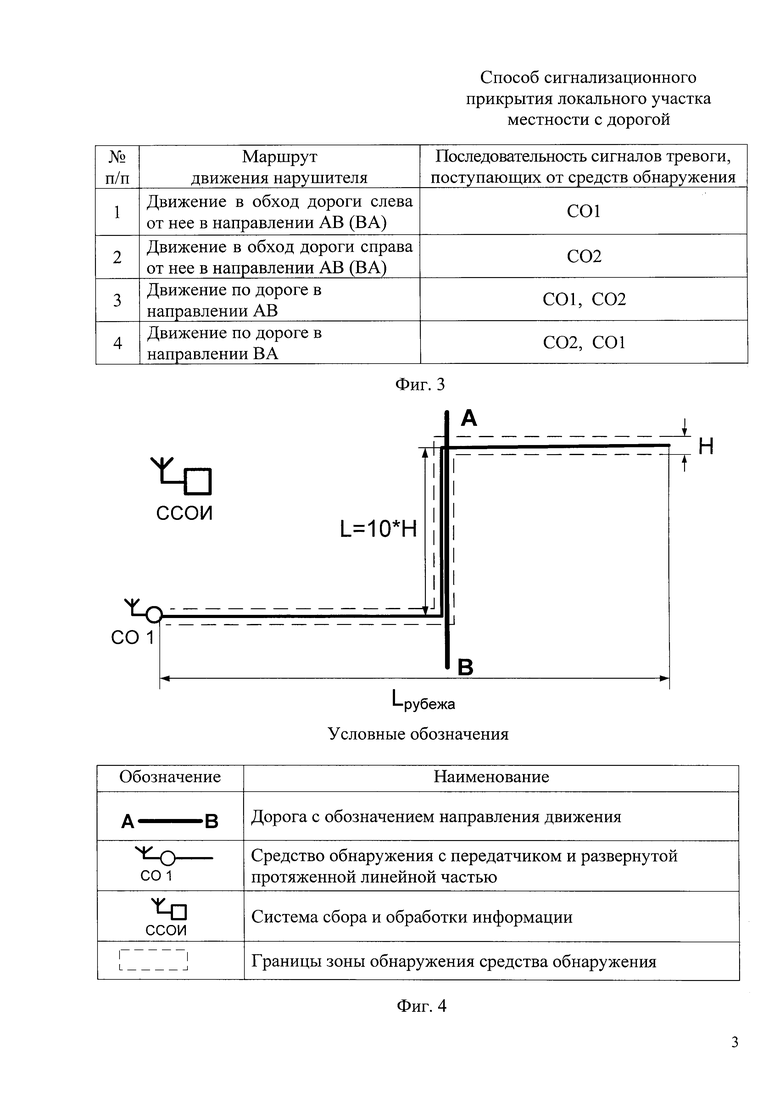
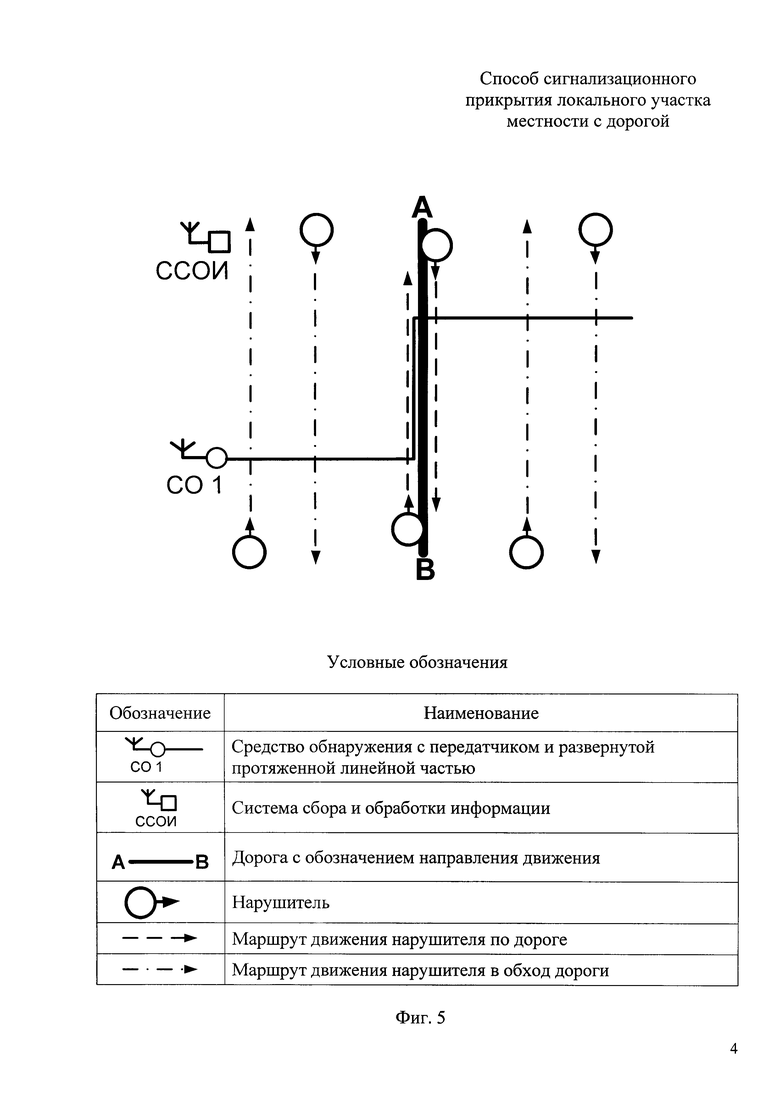
Для достижения поставленной цели разработан способ, заключающийся в развертывании ПЛЧ одного СО на участке местности, таким образом, чтобы она лежала поперек дороги и путей ее обхода справа и слева, а также участком длиной, в 10 раз превышающей ширину зоны обнаружения (ЗО) самого СО, лежала вдоль дороги в непосредственной близости от нее так, чтобы дорога находилась в ЗО по всей длине этого участка, выдаче сигнала тревоги СО при появлении нарушителя в ЗО и определении места нарушения - движение нарушителя по дороге или в обход нее с применением алгоритма, устанавливающего принадлежность длительности полученного сигнала тревоги от СО к одному из двух непересекающихся между собой диапазонов временных интервалов, рассчитанных аналитически для каждого из мест нарушения с учетом максимально и минимально возможных скоростей движения нарушителя, ширины ЗО, длины участка ПЛЧ, развернутой вдоль дороги, и времени перехода СО в дежурный режим после выхода нарушителя из ЗО (фиг. 4).
Проходя по дороге или обходя ее справа (слева), нарушитель попадает в ЗО СО (фиг. 4, 5). Благодаря специально разработанной схеме развертывания ПЛЧ место пересечения нарушителем ПЛЧ СО (по дороге или в обход нее) можно определить по длительности полученного сигнала тревоги от СО.
Так, пеший нарушитель движется со скоростью, пределы которой зависят от времени суток, типа местности и погодных условий. Пределы этих скоростей определены практически, известны и подтверждены на основе экспериментальных исследований [4-6]. В предлагаемом способе для повышения достоверности определения места нарушения и упрощения расчетов берется расширенный диапазон скоростей, так верхнее значение скорости (Vmax) принимается 5,0 км/час (1,39 м/с), нижнее значение (Vmin) - 1,0 км/час (0,28 м/с).
Геометрические размеры сигнализационного рубежа задаются таким образом, чтобы участок, лежащий вдоль дороги (L), был длиннее в 10 раз, чем ширина ЗО ПЛЧ (Н), которую нарушитель пересекает поперек при движении в обход (фиг. 6). Тогда с учетом пятикратного превышения максимально возможной скорости движения нарушителя (Vmax) над минимальной (Vmin) и постоянного времени перехода СО в дежурный режим после выхода нарушителя из его зоны обнаружения (tdr) минимальная длительность сигнала тревоги при движении нарушителя по дороге (t(L)min) будет всегда превышать максимальную длительность сигнала (t(H)max) при движении нарушителя в обход дороги:

где L - длина ПЛЧ СО, развернутой вдоль дороги, м;
Н - ширина зоны обнаружения СО, м.
Vmax, Vmin - максимальное и минимальное значение скоростей движения нарушителя, м/сек;
tdr _ время установления СО в дежурный режим после выхода нарушителя из зоны обнаружения, с;
t(H)max - максимальная длительность сигнала тревоги при пересечении нарушителем участка ПЛЧ СО, лежащего справа (слева) от дороги, с;
t(L)min - минимальная длительность сигнала тревоги при движении нарушителя по участку дороги, вдоль которого развернута ПЛЧ СО, с.
С учетом времени установления СО в дежурный режим (tdr) после выхода нарушителя из ЗО предельные значения интервалов длительностей сигнала тревоги, сформированные СО при нахождении нарушителя в ЗО СО, находятся по формуле:

где t(H)min - минимальная длительность сигнала тревоги при пересечении нарушителем участка ПЛЧ СО, лежащего справа (слева) от дороги, с;
t(H)max - максимальная длительность сигнала тревоги при пересечении нарушителем участка ПЛЧ СО, лежащего справа (слева) от дороги, с;
t(L)min - минимальная длительность сигнала тревоги при движении нарушителя по участку дороги, вдоль которого развернута ПЛЧ СО, с;
t(L)max - минимальная длительность сигнала тревоги при движении нарушителя по участку дороги, вдоль которого развернута ПЛЧ СО, с.
В настоящее время в технике широко применяется технология нечеткого вывода [3, 7]. Следуя ей, рассматриваемые интервалы времени можно представить графически в виде трапециевидной функции принадлежности, которая показывает, что конкретное расстояние Н или L нарушитель может пройти за определенный период времени, у которого есть нижнее значение (b) (при максимальной скорости Vmax) и верхнее значение (с) (при минимальной скорости Vmin). В этих пределах уверенность в достоверности вывода (µ) о том, что могло быть пройдено расстояние L или Н максимальная и равна единице. При меньших (от (а) до (b)) или больших (от (c) до (d)) значениях времени уверенность в достоверности вывода (µ) о том, что пройдено расстояние Н или L, меньше единицы (фиг. 7):
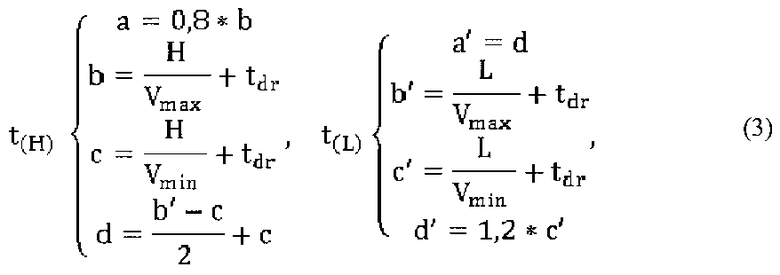
где t(H) - параметры графика функции принадлежности длительности сигнала тревоги при пересечении нарушителем участка ПЛЧ СО, лежащего справа (слева) от дороги, с;
t(L) - параметры графика функции принадлежности длительности сигнала тревоги при движении нарушителя по участку дороги, вдоль которого развернута ПЛЧ СО, с.
Так, если поступил сигнал тревоги от СО с длительностью (t), необходимо отложить его по оси абсцисс и через точки пересечения с графиками функций принадлежности определить место нарушения (движение по дороге или движение в обход нее) (фиг. 7).
Таким образом, двум возможным местам нарушения охраняемого рубежа: движение нарушителя по дороге или движение в обход нее соответствуют непересекающиеся между собой временные интервалы, в пределах которых может лежать длительность сигнала тревоги от СО, что позволяет с высокой достоверностью (µ) сделать вывод о месте нарушения локального участка местности с дорогой.
Способ включает два этапа: подготовительный и основной.
Подготовительный этап включает:
1. Развертывание средства 1 обнаружения с передатчиком и ПЛЧ с учетом рекомендуемых геометрических параметров сигнализационного рубежа Н, L (фиг. 4, 6).
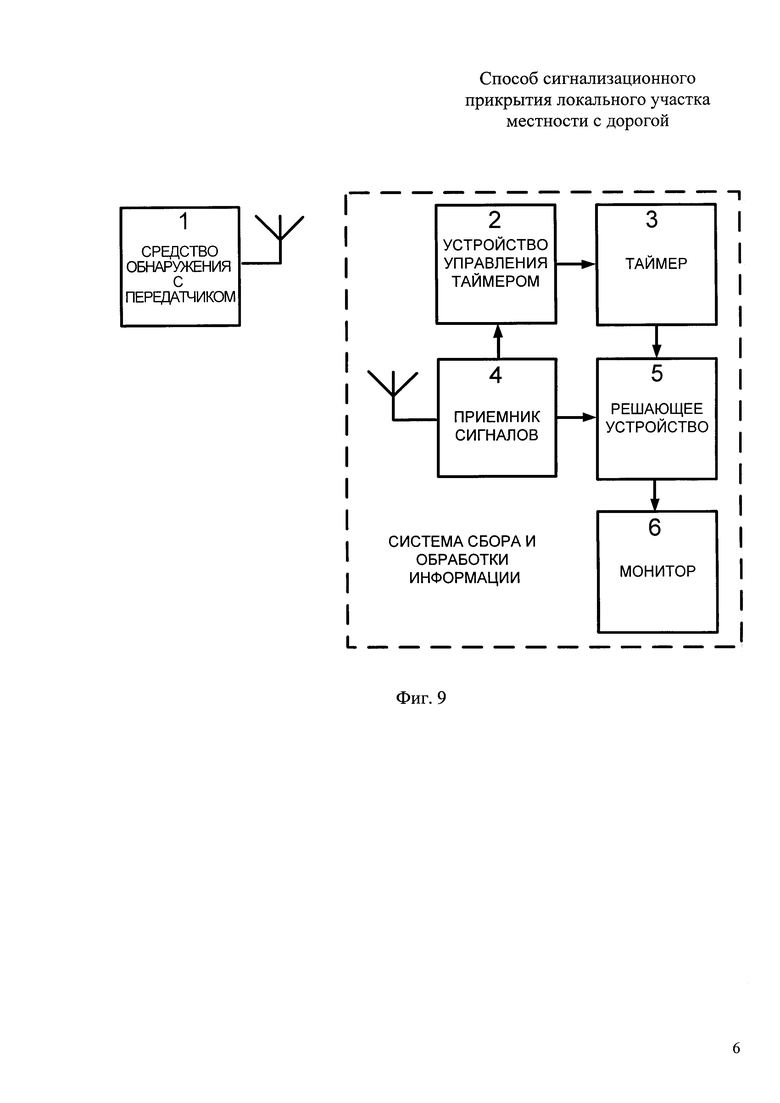
2. Развертывание на местности системы сбора и обработки информации, включающей в себя приемник 4 сигналов, устройство 2 управления таймером, таймер 3, решающее устройство 5 и монитор 6 (фиг. 9).
3. Расчет временных интервалов длительности сигналов тревоги, соответствующих определяемым местам нарушения (движение по дороге или движение в обход нее), и загрузку их в решающее устройство 5 (формула 3, фиг. 8).
4. Начало работы средства 1 обнаружения с передатчиком в дежурном режиме.
Основной этап начинается при движении нарушителя по дороге или в обход ее и попаданием его в зону обнаружения СО, он включает:
1. Регистрацию приемником 4 сигнала тревоги от средства 1 обнаружения с передатчиком при пересечении нарушителем его зоны обнаружения, запуском таймера 3 устройством 2 управления таймером, начало отсчета им длительности сигнала тревоги и записью о сработавшем средстве 1 обнаружения с передатчиком в решающее устройство 5 (фиг. 9).
2. С переходом средства 1 обнаружения с передатчиком в дежурный режим остановка работы таймера 3. Запись в решающее устройство 5 значения длительности сигнала тревоги. Установление решающим устройством 5 принадлежности к одному из двух временных интервалов полученного значения длительности сигнала тревоги (фиг. 7).
3. Формирование вывода о месте нарушения решающим устройством 5.
4. Обнуление таймера 3 устройством 2 управления таймером. Выведение результата о месте нарушения на монитор 6 (фиг. 9).
Сущность изобретения поясняется графическими материалами, где представлены:
- фиг. 1 схема развертывания одного средства обнаружения в известном способе сигнализационного прикрытия локального участка местности с дорогой и примерами направлений движения нарушителя [2, 3];
- фиг. 2 схема развертывания двух средств обнаружения в известном способе сигнализационного прикрытия локального участка местности с дорогой и примерами направлений движения нарушителя [2, 3];
- фиг. 3 таблица принятия решения (алгоритм вывода) о маршруте движения нарушителя по дороге или путях ее обхода, для известного способа сигнализационного прикрытия локального участка местности с дорогой с использованием двух СО;
- фиг. 4 схема развертывания протяженной линейной части средства обнаружения в предлагаемом способе сигнализационного прикрытия локального участка местности с дорогой;
- фиг. 5 схема развертывания протяженной линейной части средства обнаружения в предлагаемом способе и примерами направлений движения нарушителя;
- фиг. 6 сводная таблица усредненных тактико-технических характеристик применяемых средств обнаружения и рекомендуемой длины ПЛЧ, разворачиваемой вдоль дороги;
- фиг. 7 графики функций принадлежности временных интервалов длительностей сигналов тревоги от СО при движении нарушителя по дороге и в обход нее;
- фиг. 8 значения временных интервалов длительностей сигналов тревоги при движении нарушителя по участку дороги или путях ее обхода;
- фиг. 9 структурная схема взаимосвязи применяемых устройств при реализации способа.
Технический результат состоит в определении места нарушения локального участка местности с дорогой (движение обнаруженного нарушителя по дороге или в обход нее) с применением только одного СО.
Источники информации
1. Коршняков В.Г. Сигнализационные средства охраны локальных участков: уч. пособие / В.Г. Коршняков - Калининград: КПИ ФСБ РФ, 2004. - 135 с.
2. Маршалов Т.А. Технические средства охраны границы: учебник / Т.А. Маршалов, А.В. Густов, И.М. Потапов. - Калининград: КПИ ФСБ РФ, 2009. - 568 с.
3. Пат. 2517687 Российская Федерация, МПК51 G08B 13/12, G08B 25/00, G08B 29/00. Способ определения направления движения нарушителя / С.А. Удот. - №2012157424/08; заявл. 24.12.12; опубл. 27.05.14, Бюл. №15.
4. Шумов В.В. Применение математических методов и моделей для обоснования решений на охрану государственной границы: Научно-практическое пособие. - Часть 2. - М.: Просвещение, 1996. - 196 с.
5. Псарев А.А. Военная топография: Учебник. - М.: Воениздат, 1986. - 384 с.
6. Баленко С.В. Школа выживания. - М., 1994. - 140 с.
7. Леоненков А.В. Нечеткое моделирование в среде MATLAB и fuzzyTECH / А.В. Леоненков. - СПб.: БХВ - Петербург, 2005. - 736 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ НАРУШИТЕЛЯ И ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ЕГО ДВИЖЕНИЯ НА ПЕРЕКРЕСТКЕ ДОРОГ И ПУТЯХ ЕГО ОБХОДА | 2014 |
|
RU2554530C1 |
| СПОСОБ СИГНАЛИЗАЦИОННОГО ПРИКРЫТИЯ ЛОКАЛЬНОГО УЧАСТКА МЕСТНОСТИ С ТРЕХСТОРОННЕЙ РАЗВИЛКОЙ ДОРОГИ | 2015 |
|
RU2605063C1 |
| СПОСОБ СИГНАЛИЗАЦИОННОГО ПРИКРЫТИЯ ПЕРЕКРЕСТКА ДОРОГ И ПУТЕЙ ЕГО ОБХОДА | 2013 |
|
RU2540841C1 |
| СПОСОБ СИГНАЛИЗАЦИОННОГО ПРИКРЫТИЯ РАЗВИЛКИ ДОРОГИ | 2015 |
|
RU2612327C1 |
| СПОСОБ ОХРАННОГО МОНИТОРИНГА | 2016 |
|
RU2617575C1 |
| СПОСОБ ОХРАННОГО МОНИТОРИНГА | 2016 |
|
RU2621179C1 |
| СПОСОБ ОХРАННОГО МОНИТОРИНГА МЕСТА ПЕРЕСЕЧЕНИЯ ТРЕХ ДОРОГ | 2017 |
|
RU2647668C1 |
| СПОСОБ СИГНАЛИЗАЦИОННОГО ПРИКРЫТИЯ ПЕРЕКРЁСТКА ДОРОГ И ПУТЕЙ ЕГО ОБХОДА | 2014 |
|
RU2546303C1 |
| СПОСОБ СИГНАЛИЗАЦИОННОГО ПРИКРЫТИЯ ДВУХСТОРОННЕЙ РАЗВИЛКИ ДОРОГИ | 2015 |
|
RU2605509C1 |
| СПОСОБ ОХРАННОГО МОНИТОРИНГА С ПРИМЕНЕНИЕМ ОБРЫВНОГО РЕФЛЕКТОМЕТРИЧЕСКОГО СРЕДСТВА ОБНАРУЖЕНИЯ | 2019 |
|
RU2703186C1 |

Изобретение относится к способам сигнализационного прикрытия локального участка местности с дорогой и может быть использовано в случаях применения проводноволнового или сейсмического средств обнаружения (СО) с протяженной линейной частью (ПЛЧ) для сигнализационного прикрытия дороги и путей их обхода. Способ заключается в развертывании ПЛЧ одного СО на участке местности таким образом, чтобы она лежала поперек дороги и путей ее обхода справа и слева, а также участком длиной, в 10 раз превышающей ширину зоны обнаружения (ЗО) самого СО, лежала вдоль дороги в непосредственной близости от нее так, чтобы дорога находилась в ЗО по всей длине этого участка, выдаче сигнала тревоги СО при появлении нарушителя в ЗО, и определении места нарушения - движение нарушителя по дороге или в обход нее с применением алгоритма, устанавливающего принадлежность длительности полученного сигнала тревоги от СО к одному из двух непересекающихся между собой диапазонов временных интервалов, рассчитанных аналитически для каждого из мест нарушения с учетом максимально и минимально возможных скоростей движения нарушителя, ширины ЗО, длины участка ПЛЧ, развернутой вдоль дороги, и времени перехода СО в дежурный режим после выхода нарушителя из ЗО. Способ включает подготовительный этап с развертыванием по разработанной схеме ПЛЧ СО на локальном участке местности с дорогой и основной этап, который начинается обнаружением нарушителя и заканчивается определением места нарушения (движение нарушителя по дороге или в обход нее). Технический результат состоит в определении места нарушения локального участка местности с дорогой (движение обнаруженного нарушителя по дороге или в обход нее) с применением только одного СО. 9 ил.
Способ сигнализационного прикрытия локального участка местности с дорогой, заключающийся в развертывании протяженной линейной части одного средства обнаружения поперек дороги и путей ее обхода справа и слева, выдаче сигнала тревоги средством обнаружения при появлении нарушителя в его зоне обнаружения, отличающийся тем, что при развертывании протяженной линейной части ее участок длиной, в 10 раз превышающей ширину зоны обнаружения самого средства обнаружения, прокладывается вдоль дороги в непосредственной близости от нее так, чтобы дорога находилась в зоне обнаружения по всей длине этого участка и место нарушения - движение нарушителя по дороге или в обход нее - определяется с применением алгоритма, устанавливающего принадлежность длительности полученного сигнала тревоги от средства обнаружения к одному из двух непересекающихся между собой диапазонов временных интервалов, рассчитанных аналитически для каждого из мест нарушения с учетом максимально и минимально возможных скоростей движения нарушителя, ширины зоны обнаружения, длины участка протяженной линейной части, развернутой вдоль дороги, и времени перехода средства обнаружения в дежурный режим после выхода нарушителя из зоны обнаружения.
| WO2011025563 A1 03.03.2011 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ДВИЖЕНИЯ НАРУШИТЕЛЯ | 2012 |
|
RU2517687C1 |
| RU 2012145072 A 27.04.2014 | |||
| Приспособление к многокамерной масляной печи для автоматической подачи сигнала при перегреве масла | 1947 |
|
SU75490A1 |

