Изобретение относится к способам дистанционного охранного мониторинга местности и может быть использовано в случаях применения средств обнаружения (СО) с протяженной зоной обнаружения (ПЗО), построенных на радиолучевом или инфракрасном принципах обнаружения, для сигнализационного прикрытия Т-образного перекрестка дорог[1].
Часто маршрут движения нарушителя проходит по имеющейся сети дорог на местности. Во многом успех задержания нарушителя зависит от знания направления его движения. Поэтому сигнализационному прикрытию перекрестков дорог уделяется значительное внимание. На практике для этого широко применяются СО с протяженной зоной обнаружения (ПЗО), построенные на радиолучевом или инфракрасном принципах обнаружения. Конкретные значения длины зоны обнаружения, рассматриваемых СО определяются тактико-техническими характеристиками и, как правило, лежат в пределах от 50 до 200 м [1-4].
Известен способ определения направления движения нарушителя на Т-образном перекрестке дорог с применением рассматриваемых СО, заключающийся в развертывании трех СО с ПЗО, таким образом, чтобы каждое из них прикрывало одну из дорог, расстояния, проходимые нарушителем через перекресток в заданном направлении от первой до последней ПЗО, были одинаковы для всех направлений, в обеспечении регистрации аппаратурой приема сигналов, анализа и представления информации первого сигнала тревоги от СО при появлении нарушителя на перекрестке, а также начале отсчета интервала времени; обеспечении регистрации последующих сигналов тревоги от соответствующих СО; применении алгоритма, определяющего направление движения по последовательности из двух одиночных сигналов тревоги, поступивших за установленный интервал времени. [5]. Недостатком этого способа является необходимость развертывания трех СО на перекрестке, по одному на каждой из дорог. То-есть способ требует применения большого числа СО.
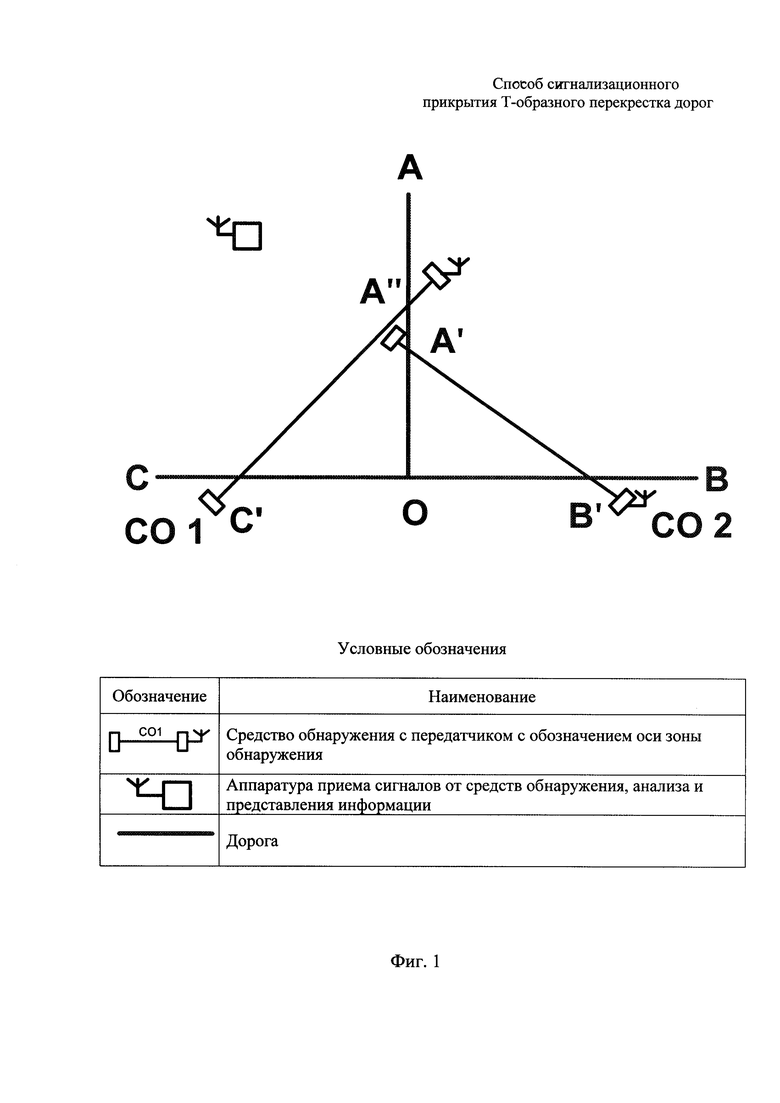
Известен другой способ определения направления движения нарушителя на Т-образном перекрестке, заключающийся в развертывании двух СО с ПЗО, таким образом, чтобы каждое из них прикрывало сразу две дороги, расстояния, проходимые нарушителем через перекресток в заданном направлении от первой до последней ПЗО, были одинаковы для всех направлений, в обеспечении регистрации аппаратурой приема сигналов, анализа и представления информации первого сигнала тревоги от СО при появлении нарушителя на перекрестке, а также начале отсчета интервала времени; обеспечении регистрации последующих сигналов тревоги от соответствующих СО; применении алгоритма, определяющего направление движения по последовательности из двух или трех одиночных сигналов тревоги, поступивших за установленный интервал времени [5] (фиг. 1).
Недостатками способа с применением двух СО являются:
- низкая оперативность вывода о направлении движения нарушителя: значительная задержка по времени при определении направления движения нарушителя, а именно направления СВ;
- низкая достоверность вывода о направлении движения нарушителя: вероятность ошибки при определении направления движения нарушителя при его движении с остановками, а именно в направлениях АС и СА.
Так, в известном способе при движения нарушителя в направлении СВ окончательный вывод о направлении его движения возможен не ранее окончания интервала времени, принимаемого за расчетный [5].

где ΔТ - принимаемый за расчетный интервал времени, в течение которого регистрируются сигналы тревоги, поступающие от СО, с;
ΔtN MAX - максимально возможное вредя движения нарушителя через перекресток в заданном направлении от первой до последней ПЗО, с.
Это связано с тем, что последовательность сработавших СО при движении нарушителя в направлении СВ совпадает с началом последовательности сработавших СО при его движении в направлении АС и АВ. [5]
ΔtN MAX зависит от минимальной скорости движения нарушителя и расстояния, проходимого им от первой ПЗО до последней [5]:

где SN - расстояние, проходимое нарушителем через перекресток в заданном направлении от первой до последней ПЗО, м;
VMIN - минимально возможная скорость нарушителя на перекрестке, м/с.
Необходимость выдерживания расчетного интервала времени (ΔT) снижает оперативность принятия решения о движении нарушителя в направлении СВ. Так, если нарушитель пересек перекресток в направлении СВ со скоростью, в 2 раза превышающей минимально возможную скорость, VMIN:

где VCB - фактическая скорость движения нарушителя в направлении СВ, м/с.
То время вывода о направлении движения (равное расчетному интервалу времени, в течение которого регистрируются сигналы тревоги, поступающие от СО) будет в 2,4 раза превышать время, фактически затраченное нарушителем на пересечение двух зон обнаружения.

где tCB - время, фактически затраченное нарушителем на пересечение зон двух обнаружения в направлении СВ, с.
То есть, чем выше фактическая скорость нарушителя через перекресток в направлении СВ в сравнении с минимально возможной скоростью, тем больше задержка по времени в принятии решения.
Для направлений движения АС и СА последовательность номеров СО, выдавших сигнал тревоги, совпадает полностью [5]. Поэтому указанные направления определяются попарно.
Целью изобретения является повышение оперативности и достоверности вывода о направлении движения нарушителя.
Для достижения поставленной цели разработан способ сигнализационного прикрытия Т-образного перекрестка дорог. Способ развертывании на Т-образном перекрестке дорог двух СО с ПЗО, таким образом, чтобы каждое из них прикрывало сразу две дороги, расстояния, проходимые нарушителем через перекресток в заданном направлении от первой до последней ПЗО, были одинаковы для всех направлений и чтобы их ПЗО пересекались на примыкающей дороге, в обеспечении регистрации аппаратурой приема сигналов, анализа и представления информации первого сигнала тревоги от СО при появлении нарушителя на перекрестке, а также начале отсчета интервала времени; обеспечении регистрации последующих сигналов тревоги от соответствующих СО; применении алгоритма, определяющего направление движения по последовательности из двух одиночных сигналов тревоги, поступивших раздельно, или последовательности из двух сигналов, поступивших одновременно, и одного одиночного сигнала тревоги согласно таблице соответствия направления движения нарушителя.
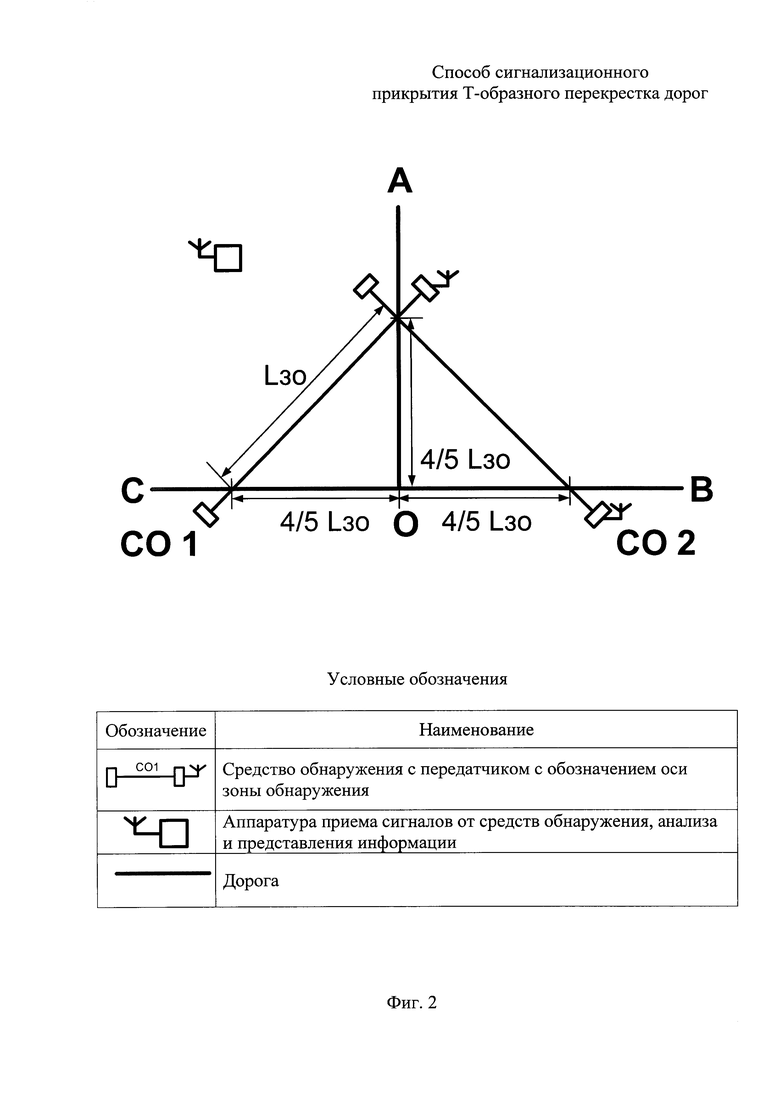
Схема развертывания СО составляется таким образом, чтобы ПЗО каждого средства пересекало две дороги, расстояния, проходимые нарушителем в любом из направлений движения через перекресток от первого СО до второго СО, были равны и пересекалась в одной общей точке на примыкающей дороге. Из трех дорог Т-образного перекрестка примыкающей является та дорога, которая перпендикулярная двум другим (фиг 2).
При движении нарушителя по дороге OA он пересекает ПЗО обоих СО одновременно, поэтому от них поступят сигналы тревог с задержкой между собой (ΔtAO) не более 1-2 секунд, что и связано с техническими особенностями работы средств.

где ΔtOA - задержка между поступлением сигналов тревог при пересечении нарушителем двух ПЗО, проходящих через одну дорогу АО, с.
При движении нарушителя по дороге ОС поступит одиночный сигнал тревоги от CO1.
При движении нарушителя по дороге ОВ поступит одиночный сигнал тревоги от CO2.
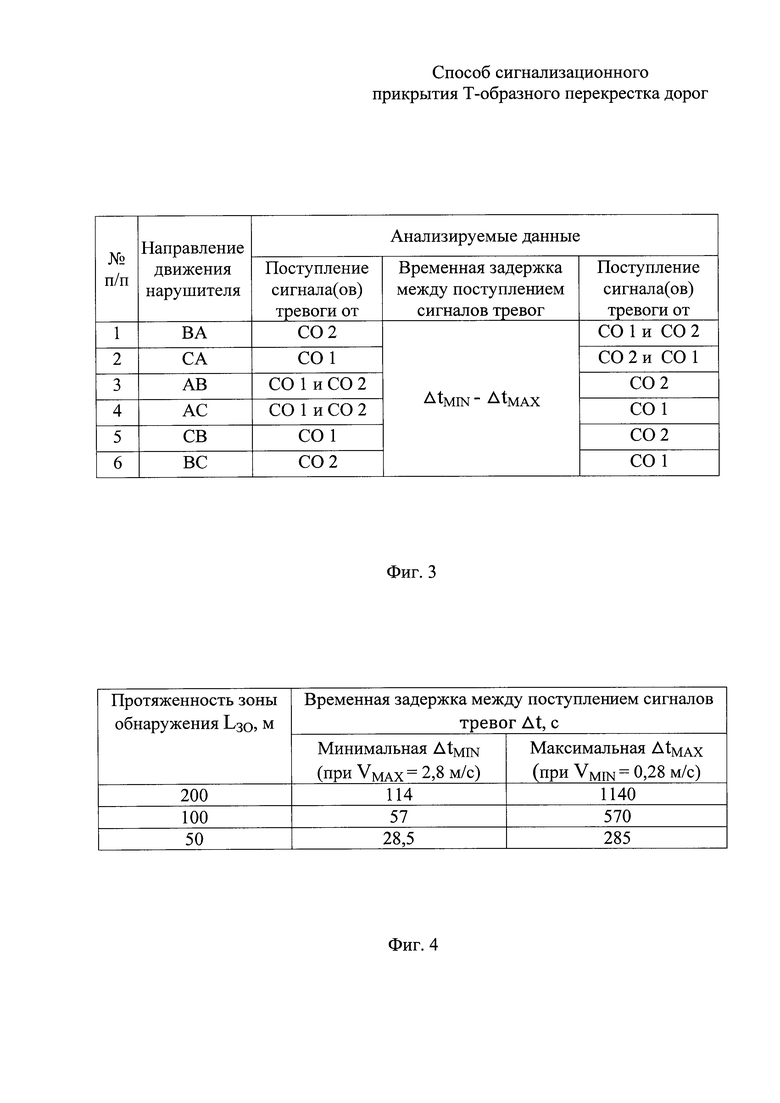
Таким образом, решение о направлении движения нарушителя может быть принято по последовательности из двух одиночных сигналов тревоги, поступивших раздельно, или последовательности из двух сигналов, поступивших одновременно, и одного одиночного сигнала тревоги согласно таблице соответствия направления движения нарушителя.
Исключение из алгоритма вывода о направлении движения нарушителя отношений между временными интервалами задержки поступления сигналов повышает достоверность вывода, так как в этом случае она не зависит от того, как движется нарушитель с остановками или без.
Наличие только одной задержки между поступлением сигналов тревог для всех шести направлений движения повышает оперативность вывода, так как он принимается без выдерживания расчетного интервала времени ΔТ (фиг. 3).
Временная задержка между поступлением сигналов тревог определяется расстоянием, проходимым нарушителем при движении между зонами обнаружения и его скоростью (фиг. 2):

где Δt - временная задержка между поступлением сигналов тревог, при движении нарушителя между зонами обнаружения, с;
VH - скорость нарушителя, м/с;
LЗO - длина зоны обнаружения средств, м.
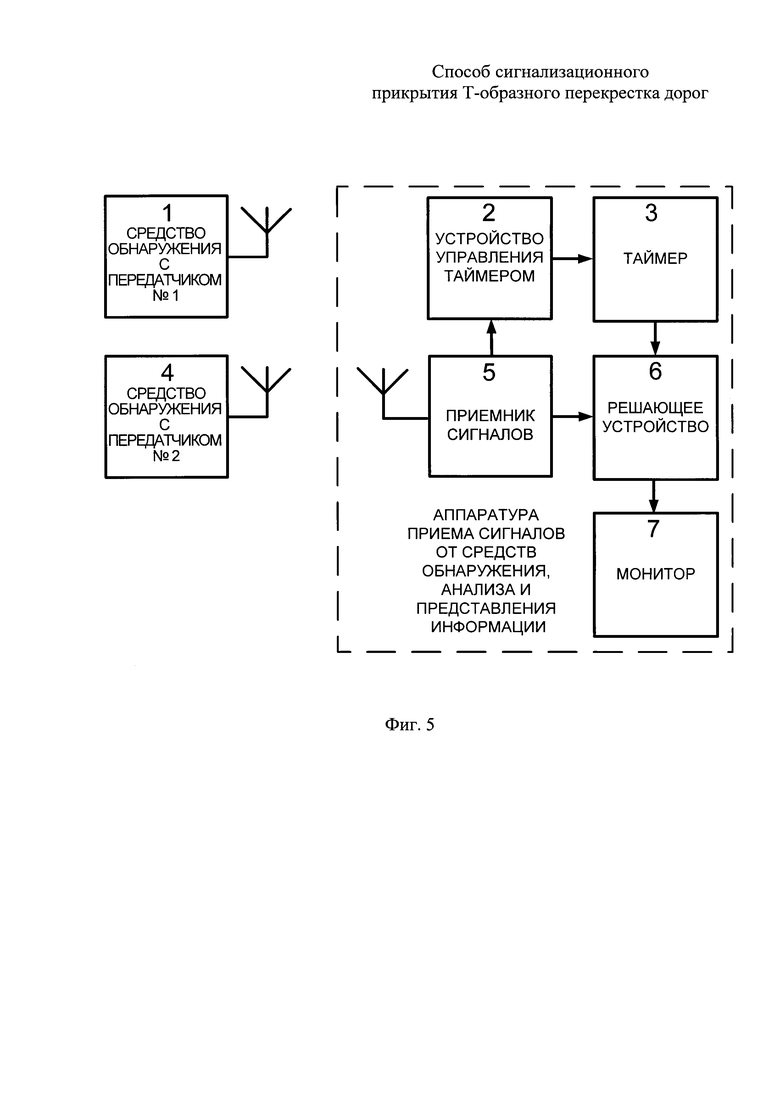
Минимальное и максимальное значения временной задержки между поступлением сигналов тревог рассчитывается, исходя из максимальной и минимальной скоростей движения нарушителя (фиг. 4).
Пределы скоростей нарушителя зависят от конкретных условий местности, определены практически, известны и подтверждены на основе статистических исследований [6, 7].
Для упрощения расчетов и повышения достоверности вывода о направлении движения нарушителя в предлагаемом способе берется расширенный диапазон скоростей нарушителя:

Так, например, при скорости 10 км/час и длине зоны обнаружения 100 метров эта задержка составит 57 секунд (фиг 4).
Сущность изобретения поясняется графическими материалами, где представлено на:
- фиг. 1 - схема развертывания средств обнаружения в известном способе определения направления движения нарушителя на Т-образном перекрестке дорог;
- фиг. 2 - схема развертывания средств обнаружения в предлагаемом способе;
- фиг. 3 - таблица соответствия последовательности поступивших сигналов тревоги направлениям движения нарушителя;
- фиг. 4 - таблица с расчетными значениями временных задержек между поступлением сигналов тревог;
- фиг. 5 - структурная схема взаимосвязи применяемых устройств при реализации способа.
При реализации способа применяются следующие устройства: средства 1 и 4 обнаружения с передатчиками №1 и №2, устройство 2 управления таймером 3, приемник 5 сигналов, решающее устройство 6, монитор 7 (фиг. 5).
Способ включает два этапа: подготовительный и основной. Подготовительный этап:
1. Развертывание средств обнаружения 1 и 4 с передатчиками №1 и №2 с учетом рекомендуемых расстояний от центра перекрестка до точки пересечения оси ПЗО СО (фиг. 2).
2. Развертывание на местности аппаратуры приема сигналов, анализа и представления информации (фиг. 5).
3. Составление таблицы соответствия последовательности поступивших сигналов тревоги направлениям движения нарушителя и загрузка ее в решающее устройство 6 (фиг. 3, 4).
Основной этап начинается при движении нарушителя через перекресток дорог и включает:
1. Регистрацию приемником 5 сигналов одного одиночного сигнала тревоги от одного из средств 1 или 4 обнаружения с передатчиком или двух сигналов тревоги, поступивших одновременно, при пересечении нарушителем его (их) ПЗО, запуском таймера 3 устройством 2 управления таймером, начало отсчета им интервала времени Δt (времени задержки между поступлением сигналов тревог) и записью номера(ов) средства обнаружения в решающее устройство 6 (фиг. 5).
2. Продолжение отсчета интервала времени Δt таймером 3, регистрацию приемником 5 сигналов следующих двух сигналов тревоги, поступивших одновременно, или одного сигнала тревоги от средств обнаружения 4 или 1 при пересечении нарушителем их ПЗО, записью их (его) в решающее устройство 6 и окончание отсчета интервала времени Δt таймером 3 (фиг. 5).
3. Определение направления движения нарушителя согласно таблице соответствия последовательности поступивших сигналов тревоги направлениям движения нарушителя (фиг. 3).
4. Выведение результата на монитор 7 (фиг. 5).
Технический результат состоит в повышении оперативности и достоверности вывода о направлении движения нарушителя.
Источники информации
1. Магауенов Р.Г. Системы охранной сигнализации: основы теории и принципы построения: уч. пособие / Р.Г. Магауенов - М.: Горячая - Телеком, 2004. 367 с.
2. Извещатель охранный линейный радиоволновый «БАРЬЕР-300/500» Паспорт 4372-43071246-003 ПС. - ЗАО "ОХРАННАЯ ТЕХНИКА" 442960, г. Заречный Пензенской обл., а/я 45. - 14 с.
3. Извещатель охранный радиоволновый линейный «dHunt» Руководство по эксплуатации ЮСДП. 425142.066 РЭ - 39 с.
4. Изделие "Рлд Редут-300" Руководство по эксплуатации БЖАК. 425142.043 РЭ - 59 с.
5. Коршняков В.Г. Сигнализационные средства охраны локальных участков: уч. пособие / В.Г. Коршняков - Калининград: КПИ ФСБ РФ, 2004. - 135 с.
6. Псарев А.А. Военная топография: Учебник. - М.: Воениздат, 1986. 384 с.
7. Баленко С.В. Школа выживания. - М.: 1994. - 140 с.
Изобретение относится к способам дистанционного охранного мониторинга местности и может быть использовано в случаях применения средств обнаружения (СО) с протяженной зоной обнаружения (ПЗО), построенных на радиолучевом или инфракрасном принципах обнаружения, для сигнализационного прикрытия Т-образного перекрестка дорог. Способ заключается в развертывании на Т-образном перекрестке дорог двух СО с ПЗО, таким образом, чтобы каждое из них прикрывало сразу две дороги, расстояния, проходимые нарушителем через перекресток в заданном направлении от первой до последней ПЗО, были одинаковы для всех направлений и чтобы их ПЗО пересекались на примыкающей дороге, в обеспечении регистрации аппаратурой приема сигналов, анализа и представления информации первого сигнала тревоги от СО при появлении нарушителя на перекрестке, а также начале отсчета интервала времени; обеспечении регистрации последующих сигналов тревоги от соответствующих СО; применении алгоритма, определяющего направление движения по последовательности из двух одиночных сигналов тревоги, поступивших раздельно, или последовательности из двух сигналов, поступивших одновременно, и одного одиночного сигнала тревоги согласно таблице соответствия направления движения нарушителя. Способ включает подготовительный этап с развертыванием СО по установленной схеме и основной этап, который начинается с момента пересечения нарушителем ПЗО. В ходе основного этапа направление движения определяется по разработанному алгоритму. Технический результат состоит в повышении оперативности и достоверности вывода о направлении движения нарушителя. 5 ил.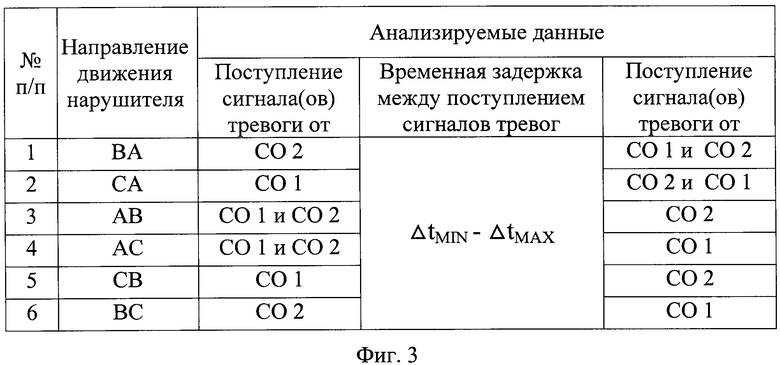
Способ сигнализационного прикрытия Т-образного перекрестка дорог, заключающийся в развертывании на Т-образном перекрестке дорог двух средств обнаружения с протяженной зоной обнаружения, таким образом, чтобы каждое из них прикрывало сразу две дороги и расстояния, проходимые нарушителем через перекресток в заданном направлении от первой до последней протяженной зоны обнаружения, были одинаковы для всех направлений, в обеспечении регистрации аппаратурой приема сигналов, анализа и представления информации первого сигнала тревоги от средства обнаружения при появлении нарушителя на перекрестке, а также начале отсчета интервала времени; обеспечении регистрации последующих сигналов тревоги от соответствующих средств обнаружения; применении алгоритма, определяющего направление движения по последовательности сигналов тревоги согласно таблице соответствия направления движения нарушителя и последовательности сигналов тревоги, отличающийся тем, что средства обнаружения развертываются так, чтобы их зоны обнаружения пересекались на примыкающей дороге и в алгоритме определения направления движения нарушителя анализируются последовательность из двух одиночных сигналов тревоги, поступивших раздельно от разных средств обнаружения, или последовательность из двух сигналов, поступивших одновременно от разных средств обнаружения, и одного одиночного сигнала тревоги.
| Газовая горелка для водоподогревателей проточного типа | 1956 |
|
SU113398A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ДВИЖЕНИЯ НАРУШИТЕЛЯ | 2012 |
|
RU2517687C1 |
| СПОСОБ ОБНАРУЖЕНИЯ НАРУШИТЕЛЯ И ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ЕГО ДВИЖЕНИЯ НА ПЕРЕКРЕСТКЕ ДОРОГ И ПУТЯХ ЕГО ОБХОДА | 2014 |
|
RU2554530C1 |
| УСТРОЙСТВО для БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВРАЩАЮЩИХСЯ ТЕЛ | 0 |
|
SU219256A1 |

