Область техники, к которой относится изобретение
Изобретение относится к области обувной промышленности, а именно к устройствам предварительной обработки кожаных заготовок верха обуви (далее заготовок) перед их затягиванием на колодках, для придания заготовкам свойств, повышающих качество по ряду физико-механических и гигиенических показателей, в частности, формоустойчивости, гигроскопичности, воздухопроницаемости и др.
Уровень техники
Наиболее близким по технической сущности является выбранная за прототип высокочастотная емкостная плазменная установка [Абдулин И.Ш. Высокочастотная плазменная обработка капиллярно-пористых материалов. Теория и практика применения. - Казань: Издательство Казанского университета, 2004. - 428 с.], состоящая из пары дискообразных электродов, бокового колпака вакуумной камеры, системы подачи и регулировки плазмообразующего газа, высокочастотного генератора и вакуумного откачного поста. Обработка заготовки осуществляется следующим образом: заготовка помещается в разрядную камеру, затем после герметезации камеры проводится предварительная откачка воздуха из вакуумной камеры, далее в разрядную камеру вкачивается рабочий газ, устанавливается заданное давление и высокое напряжение на высокочастотном генераторе. Под действием электромагнитного поля происходит нагрев плазмообразующего газа до состояния плазмы. Режим плазменной обработки регулируется путем изменения следующих параметров: расход газа, мощность разряда, рабочее давление в разрядной камере, частота высокочастотного генератора, продолжительность обработки.
Причины, препятствующие получению требуемого результата
Прототип имеет ряд недостатков. Примененная компоновочная схема, когда боковой колпак вакуумной камеры и дискообразные высокочастотные электроды располагаются на одной оси, усложняет загрузку и разгрузку заготовок из разрядной камеры, так как их приходится переносить над высокочастотным электродом. При каждой загрузке-разгрузке рабочей вакуумной камеры необходимо разгерметезировать, открыть поступление воздуха из внешней среды, а затем снова после прикрепления колпака откачивать этот воздух, создавать разрежение достаточно высокой степени. Обслуживание прототипа ведется оператором, который находится в непосредственной близости к газоразрядной камере и к другой аппаратуре повышенной опасности для его здоровья. В прототипе боковой колпак открывает вакуумную камеру с помощью консоли путем отведения бокового клапана по направлению продольной оси вакуумной камеры. Такая система открытия и закрытия вакуумной камеры препятствует прямой загрузке-разгрузке вакуумной камеры партией заготовок, и позволяет только вручную загружать-разгружать отдельными образцами. Прототип не оснащен автоматическими и роботизированными устройствами, что увеличивает затраты времени на выполнение вспомогательных операций, в частности, загрузки-разгрузки, герметизации и др., а также вызывает необходимость для обслуживания установки использовать ручной труд.
Раскрытие изобретения
Технический результат
Использование предлагаемого изобретения позволит ликвидировать ручной труд на данной операции за счет применения промышленных роботов (далее роботов) и других средств автоматизации; увеличить производительность установки путем использования системы вакуумных камер реверсивного типа, параллельного выполнения ряда операций, в частности, открытие и закрытие шлюзов, откачка воздуха вакуумными насосами, загрузка и разгрузка вакуумных камер роботами; обеспечить повышенный уровень охраны труда из-за удаления персонала из зоны интенсивного электромагнитного излучения.
Кроме того, предлагаемое изобретение может быть встроено в технологический поток сборки обуви, не нарушая ритм производства, и осуществлять обработку заготовок высокочастотной плазмой пониженного давления в автоматическом режиме.
Сущность изобретения
Изобретение направлено: на решение задачи ликвидации ручного труда на операции плазменной обработки заготовки, что обеспечивается автоматизацией элементов операции плазменной обработки заготовки, таких как загрузка и разгрузка предлагаемого устройства, осуществляемое с помощью двух роботов; на повышение производительности за счет применения параллельных методов обработки и создания компоновки реверсивного типа.
Предлагаемое устройство имеет линейную компоновку вакуумных камер. Ось, вдоль которой установлены высокочастотные электроды, образующие разрядную зону, где происходит обработка заготовок, перпендикулярна продольной оси расположения рабочей и загрузочно-разгрузочной камер. Такое перекрещивающее положение вышеназванных осей предлагаемого устройства позволяет перемещать заготовки при загрузке-разгрузке плазменной зоны рабочей камеры непосредственно в пространство между высокочастотными электродами, не поднимая и опуская заготовки над высокочастотным электродом, как это делается в прототипе. Загрузочная-разгрузочная камера предназначена для приема заготовок, которые поступают в нее с помощью обслуживающего ее первого робота. Загрузочно-разгрузочная камера через межкамерный шлюз соединена с рабочей камерой, предназначенной для обработки заготовок плазмой. Загрузка рабочей камеры осуществляется установленным в ней вторым роботом. Этот же робот выполняет функцию разгрузки рабочей камеры после обработки плазмой заготовок, осуществляя их реверсивный перенос в загрузочно-разгрузочную камеру.
Для отделения загрузочно-разгрузочной камеры от рабочей камеры и от внешней среды служат два шлюза. Входной шлюз установлен на границе загрузочно-разгрузочной камеры и внешней среды в зоне предшествующих операций технологического цикла.
Межкамерный шлюз отделяет загрузочно-разгрузочную камеру от рабочей камеры. Оба шлюза смонтированы в теле загрузочно-разгрузочной камеры и состоят из узких металлических пластин, расположенных на некотором шаге друг от друга, причем между этими пластинами имеется резиновое соединение, а они сами завулканизированы в резине, что обеспечивает воздухонепроницаемость и гибкую связь между узкими металлическими пластинами. Благодаря этому шлюзы приобретают способность изменять свою форму при перемещении в пазах стенок и перекрытий загрузочно-разгрузочной камеры, что осуществляется с помощью приводных шестерен. Все шлюзы оснащены пневмопрокладками, расположенными по периметрам межкамерного проема, отделяющего загрузочно-разгрузочную камеру от внешней среды. Пневмопрокладки наполняются воздухом, когда требуется герметизация камер, и из них выпускается воздух во внекамерное пространство, когда необходимо перемещение шлюзов.
В камерах заготовки верха обуви находятся в подвешенном состоянии на продольных опорах в виде полых цилиндров с присоединенным фигурным профилем, расположенных на высоте, обеспечивающей нахождение заготовок верха обуви в рабочей камере в зоне плазменного потока ионизированного газа. Продольные опоры неподвижно крепятся в верхней части камер. В загрузочно-разгрузочной камере установлено две параллельные продольные в горизонтальной плоскости опоры (далее опоры), причем задняя опора служит для разгрузки с помощью второго робота обработанных заготовок, поступающих из рабочей камеры, и для перемещения этих заготовок с помощью первого робота из загрузочно-разгрузочной камеры на конвейер или другое транспортное средство для снабжения обработанными заготовками последующих операций согласно технологическому циклу. Передняя опора предназначена для снабжения необработанными заготовками с помощью второго робота рабочей камеры, а затем с помощью первого робота эта опора заполняется необработанными заготовками с предшествующей операции. В рабочей камере имеется одна опора, загружаемая вторым роботом необработанными заготовками, которые далее подвергаются плазменному воздействию, и затем уже обработанные заготовки в обратном (реверсивном) направлении с помощью второго робота возвращаются с опоры рабочей камеры на заднюю опору загрузочно-разгрузочной камеры. В продольных опорах, представляющих собой полый цилиндр, на всю длину в нижней части присоединен фигурный профиль Т-образного вида, в который вставляется верхний конец захвата заготовки, имеющий ответный профиль, а к нижнему концу захвата прикрепляется сама заготовка верха обуви. Нижняя часть захвата представляет собой прикрепленные к его верхней части две пластины, расположенные под углом друг к другу. На одной пластине в пазе установлен шарик, который может подниматься и опускаться, при этом не покидая паза. При вставке заготовки в захват между пластинами шарик поднимается и затем опускается, зажимая заготовку. Функцией роботов является вставить захваты с заготовками в фигурный профиль продольной опоры, переместить заготовки и снять их с другого конца продольных опор согласно технологическому циклу. Существенным отличием предлагаемого устройства является то, что устройство состоит из двух вакуумных камер линейно скомпонованных, причем рабочая камера постоянно находится в режиме заданного разрежения. Все камеры обслуживаются роботами и отделены друг от друга и внешней среды двумя шлюзами, открывающимися и закрывающимися в автоматическом режиме. В устройстве обеспечивается программным управлением следующий порядок движения: от предшествующей операции необработанные плазмой заготовки поступают с помощью первого робота в загрузочно-разгрузочную камеру на переднюю опору, предназначенную для последующего снабжения заготовками рабочей камеры с помощью второго робота. После обработки заготовки возвращаются вторым роботом в загрузочно-разгрузочную камеру на заднюю опору, предназначенную для перемещения в обратном (реверсивном) направлении. Далее обработанные заготовки с помощью первого робота переносятся к транспортному средству, доставляющему их к последующей операции. При этом входной и межкамерный шлюзы открываются и закрываются согласно циклограмме, а в превмопрокладке при закрытии шлюзов закачивается воздух, а при открытии стравливается.
Отличительной особенностью устройства является наличие в каждой камере продольных опор в виде полых цилиндров, жестко закрепленных на рычагах к потолку камер. Продольные опоры имеют фигурный профиль, обеспечивающий установку и передвижение заготовок вдоль камер.
При этом в загрузочно-разгрузочной камере имеются две параллельные в горизонтальной плоскости продольный опоры - передняя опора предназначена для загрузки ее первым роботом необработанными заготовками с предшествующей операции, продвижение заготовок по этой опоре в направление к рабочей камере и затем перенос их вторым роботом в рабочую камеру для плазменного воздействия на них. Задняя опора загрузочно-разгрузочной камеры заполняется вторым роботом обработанными заготовками из рабочей камеры, далее с помощью первого робота обработанные заготовки переносятся на транспортное средство для передачи их на последующие операции.
Захваты заготовок с одной стороны имеют зажимы для крепления заготовок с другой ответный профиль фигурному профилю продольной опоры, благодаря чему подвеска с заготовкой удерживается на продольной опоре и беспрепятственно перемещается вдоль нее.
Все камеры соединены трубопроводами, оснащенными регуляторами, связанными с вакуумным откачным постом.
Устройство отличается тем, что продольная ось линейной компоновки вакуумных камер перпендикулярна оси высокочастотных электродов, что обеспечивает беспрепятственную установку заготовок в зоне плазменной обработки.
Устройство отличается тем, что имеет две вакуумные камеры, причем рабочая вакуумная камера находится в постоянном требуемом разрежении, а загрузочно-разгрузочная камеры находится при атмосферном давлении или при заданном разрежении в зависимости от требований технологического цикла.
Устройство оснащено двумя шлюзами, обеспечивающими герметизацию загрузочно-разгрузочной камеры, в зависимости от цикла работы устройства, а в рабочей камере межкамерный шлюз сохраняет постоянных требуемый уровень разрежения.
Устройство оснащено двумя роботами, выполняющими операции загрузка-разгрузка обеих камер согласно технологическому циклу.
Устройство имеет в каждой камере жестко закрепленные к потолкам камер рычагами продольные опоры с фигурным профилем Т-образного вида, что обеспечивает подвешивание захватов с заготовками и их продвижение вдоль камер.
Перечень фигур чертежей
1. Фиг.1 - схема автоматизированного реверсивного устройства.
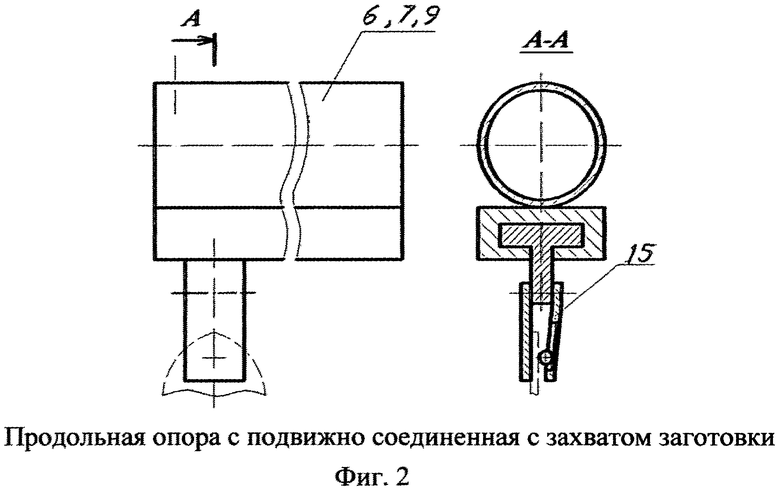
2. Фиг.2 - продольная опора, подвижно соединенная с захватом заготовки.
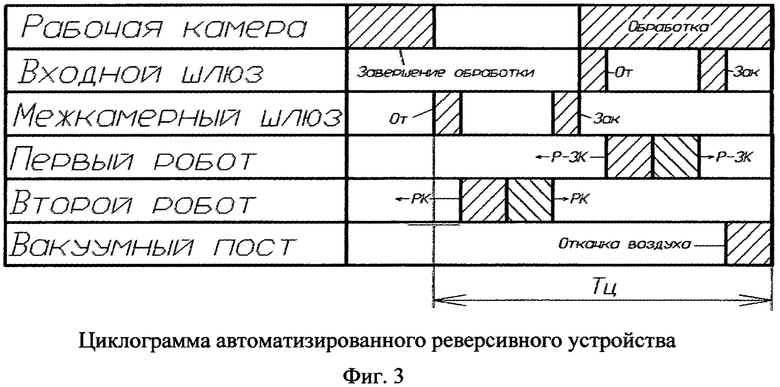
3. Фиг.3 - циклограмма автоматизированного реверсивного устройства.
Описание конструкции в статистическом состоянии
Предлагаемое устройство состоит из линейно расположенных вакуумных камер - загрузочно-разгрузочная камера 1 (фиг.1), рабочая камера 2. Загрузочно-разгрузочная камера 1 отделена от внешней среды в зоне предшествующих операций технологического цикла входным шлюзом 3, который обеспечивает герметизацию загрузочно-разгрузочной камеры 1. Загрузочно-разгрузочная камера 1 и рабочая камера 2 отделены друг от друга межкамерным шлюзом 4, герметизирующим их соединение. Все шлюзы представляют собой гибко соединенные резиной пластины, что позволяет их перемещать в специальных пазах, имеющихся в камерах, и сообщать им движение приводными зубчатыми шестернями, смонтированными в камерах. Все шлюзы 3, 4 для создания герметизации оснащены пневмопрокладками, расположенными по периметру межкамерного проема и проема, отделяющего загрузочно-разгрузочную камеру 1 от внешней среды. Пневмопрокладки заполняются воздухом, когда требуется герметизация камер 1, 2 и освобождаются от него, когда шлюзы 3, 4 перемещаются. Перемещение заготовок в предлагаемом устройстве обеспечивается двумя роботами.
Первый робот 5, расположенный у загрузочно-разгрузочной камеры 1, предназначен для установки заготовок с предшествующей операции технологического цикла на переднюю продольную опору 6, расположенную в загрузочно-разгрузочной камере 1. Также первый робот 5 снимает с задней опоры 7 загрузочно-разгрузочной камеры 1 обработанные заготовки для переноса их на транспортное средство для дальнейших операций. Функция второго робота 8 - переместить заготовки из загрузочно-разгрузочной камеры 1, где предварительно откачан воздух до требуемого уровня разрежения, в рабочую камеру 2 на ее продольную опору 9 в зону плазменной обработки, а затем после обработки перенести заготовки на заднюю опору 7 загрузочно-разгрузочной камеры 1. Все продольные опоры, расположенные в камерах, идентичны друг другу (фиг.1, 2). Для создания и поддержания рабочего режима обработки заготовок плазмой устройство оснащено двумя электродами 10, высокочастотным генератором 11, вакуумным откачным постом 12, системой подачи плазмообразующего газа 13, пневмокомпрессором 14. Все подвижные опоры посредством фигурного профиля соединены подвижно с захватом 15 (фиг.1, 2) заготовок.
Устройство в динамическом состоянии
За исходное принимаем состояние предлагаемого устройства, когда в рабочей камере 2 происходит плазменная обработка заготовок, в загрузочно-разгрузочной камере на передней опоре 6 находятся необработанные еще заготовки, а на задней опоре заготовок нет. Все камеры 1 и 2 находятся в условиях вакуумного разрежения и все пневмопрокладки наполнены воздухом, который прижимает внешние стенки пневмопрокладок к периметрам межкамерного проема и проема между загрузочно-разгрузочной камеры 1 и внешней средой, что сохраняет герметизацию камеры 1 и 2. По завершении плазменной обработки заготовок в рабочей камере 2 открывается межкамерный шлюз 4, соединяющий рабочую камеру 2 и загрузочно-разгрузочную камеру 1, причем предварительно выпускается во внекамерное пространство воздух из пневмопрокладки межкамерного шлюза 4. Второй робот 8 переносит обработанные заготовки в разгрузочно-разгрузочную камеру 1, подвешивая их на продольной задней опоре этой камеры, освобождая рабочую камеру 2. Затем этот же второй робот 8 переносит необработанные заготовки с передней опоры 6 загрузочно-разгрузочной камеры 1 на опору 9 рабочей камеры 2 в пространство между электродами 9, создающими плазму, и после этого закрывается межкамерный шлюз 4. Рабочая камера 2 становится изолированной от загрузочно-разгрузочной камеры 1, подается плазмообразующий газ из системы подачи плазменного газа 13, включается высокочастотный генератор 11 и начинается плазменная обработка заготовок. Параллельно плазменной обработке открываются входной шлюз 3 и первый робот 5 переносит с задней опоры 7 обработанные заготовки из загрузочно-разгрузочной камеры 1 на транспортное средство для передачи их на последующие операции технологического цикла. Затем этот же первый робот 5 переносит подлежащие плазменной обработке заготовки с предшествующей операции на переднюю опору 6 разгрузочно-разгрузочной камеры 1. После этого входной шлюз 3 закрывается и посредством вакуумного поста 12 начинается откачка воздуха из загрузочно-разгрузочных камеры 1. Время цикла Тц определяется с конца обработки предшествующей партии заготовок до конца обработки следующей партии заготовок (фиг.3).
Порядок работы автоматизированного реверсивного устройства по циклограмме следующий (фиг.3). В начале строки «Рабочая камера» показано завершение операции плазменной обработки заготовок как «Завершение обработки». Затем открывается межкамерный шлюз, что отмечено на циклограмме как «от». Далее второй робот перемещает обработанные заготовки из рабочей камеры в загрузочно-разгрузочную камеру, что отмечено как «← РК», и из загрузочно-разгрузочной камеры необработанные заготовки этот же робот устанавливает в рабочей камере, что отмечено как «→ РК». После этого закрывается межкамерный шлюз «Зак», и рабочая камера оказывается замкнутой и в ней начинается плазменная обработка заготовок.
Параллельно процессу обработки заготовок открывается второй шлюз «от», далее первый робот освобождает загрузочно-разгрузочную камеру от заготовок «← Р - ЗК», и он же заполняет загрузочно-разгрузочную камеру необработанными заготовками «→ Р - ЗК». Затем закрывается входной шлюз «Зак», и после этого включается вакуумный пост, который откачивает воздух из загрузочно-разгрузочной камеры. После завершения плазменной обработки цикл повторяется.
При закрытии шлюзов соответствующие пневмопрокладки наполняются воздухом, что обеспечивает герметизацию, а при открытии шлюзов воздух из пневмопрокладок стравливается, что дает возможность беспрепятственно перемещать шлюзы.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО ПРОХОДНОГО ТИПА ДЛЯ ПЛАЗМЕННОЙ ОБРАБОТКИ ЗАГОТОВОК ВЕРХА ОБУВИ | 2013 |
|
RU2556166C2 |
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО ОБРАТНОГО ХОДА ДЛЯ ПЛАЗМЕННОЙ ОБРАБОТКИ ОБУВНЫХ ЗАГОТОВОК | 2016 |
|
RU2628988C1 |
| ПОЛУАВТОМАТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ПЛАЗМЕННОЙ ОБРАБОТКИ ОБУВНЫХ ЗАГОТОВОК | 2016 |
|
RU2628982C1 |
| СПОСОБ ОБРАБОТКИ ЗАГОТОВКИ ВЕРХА ОБУВИ ИЗ НАТУРАЛЬНОЙ КОЖИ ПОСЛЕ ОБТЯЖНО-ЗАТЯЖНЫХ ОПЕРАЦИЙ | 2006 |
|
RU2356482C2 |
| СПОСОБ ПОЛУЧЕНИЯ ПОРОШКОВОГО МАТЕРИАЛА НА ОСНОВЕ МЕДИ | 2011 |
|
RU2460816C1 |
| Поточная линия для обработки кромок стекол | 1990 |
|
SU1728139A1 |
| СПОСОБ ПОЛУЧЕНИЯ ПОРОШКОВОГО МАТЕРИАЛА НА ОСНОВЕ ЖЕЛЕЗА | 2010 |
|
RU2424873C1 |
| СПОСОБ ОБРАБОТКИ НАТУРАЛЬНОЙ КОЖИ С ДЕФЕКТОМ ОТДУШИСТОСТИ | 2011 |
|
RU2460805C1 |
| УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВКИ МЕТАЛЛИЧЕСКИХ ЗАГОТОВОК | 2004 |
|
RU2335720C2 |
| МНОГОКАМЕРНАЯ ПЕЧЬ ДЛЯ ВАКУУМНОЙ ЦЕМЕНТАЦИИ И ЗАКАЛКИ ЗУБЧАТЫХ КОЛЕС, ВАЛОВ, КОЛЕЦ И АНАЛОГИЧНЫХ ОБРАБАТЫВАЕМЫХ ДЕТАЛЕЙ | 2016 |
|
RU2639103C2 |
Изобретение относится к автоматизированному устройству реверсивного типа для обработки заготовок верха обуви, которое состоит из вакуумной камеры, пары электродов, запорного устройства вакуумной камеры, системы подачи и регулировки плазмообразующего газа, высокочастотного генератора и вакуумного откачного поста, причем имеется загрузочно-разгрузочная камера, линейно скомпонованная с вакуумной камерой, соединенная с последней и внешней средой системой шлюзов, два робота для загрузки внутрикамерного перемещения заготовок и разгрузки заготовок, системы продольных опор в каждой камеры для установки и транспортирования заготовок. Технический результат заключается в ликвидации ручного труда на операции плазменной обработки, повышении производительности и точности выполнения операции, выводе оператора из зоны вредных для здоровья электромагнитных волн плазмотрона. 2 з.п. ф-лы, 3 ил.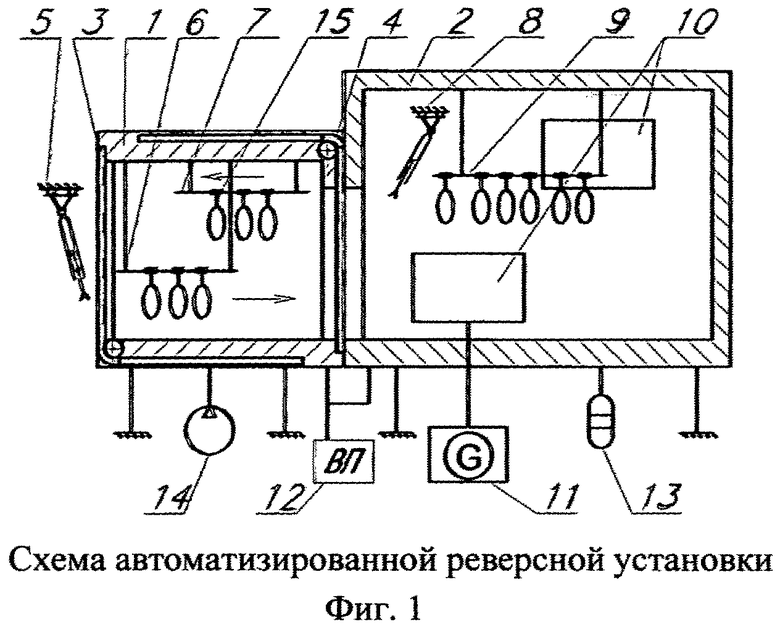
1. Автоматизированное устройство реверсивного типа для обработки заготовок верха обуви, состоящее из вакуумной камеры, пары электродов, запорного устройства вакуумной камеры, системы подачи и регулировки плазмообразующего газа, высокочастотного генератора и вакуумного откачного поста, отличающееся тем, что имеется загрузочно-разгрузочная камера, линейно скомпонованная с вакуумной камерой, соединенная с последней и внешней средой системой шлюзов, два робота для загрузки внутрикамерного перемещения заготовок и разгрузки заготовок, системы продольных опор в каждой камеры для установки и транспортирования заготовок.
2. Устройство по п.1, отличающееся тем, что содержит два шлюза на входе и выходе загрузочно-разгрузочной камеры, смонтированные в пазах загрузочно-разгрузочной камеры, перемещающиеся посредством приводных шестерен, причем все шлюзы оснащены пневматическими прокладками, которые при нагнетании в них воздуха герметично отделяют камеры друг от друга и внешней среды, а при стравливании воздуха из пневмопрокладок обеспечивают возможность движения шлюзов для открытия проемов и выполнения загрузки и разгрузки камер посредством роботов; все пневмопрокладки соединены гибкой связью с пневмокомпрессором.
3. Устройство по п.1 отличается тем, что загрузочно-разгрузочная камера имеет заднюю и переднюю продольные опоры, жестко прикрепленные рычагами к потолку камеры, рабочая камера имеет одну аналогичную опору, при этом в нижней части продольных опор имеется по всей длине Т-образный паз, которому соответствует ответный профиль захвата заготовок, что обеспечивает удержание заготовок в подвешенном состоянии на опоре и свободное продвижение их по продольной опоре роботами.
| СПОСОБ ОБРАБОТКИ КОЖ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1996 |
|
RU2102488C1 |
| СПОСОБ ОБРАБОТКИ ЗАГОТОВКИ ВЕРХА ОБУВИ ИЗ НАТУРАЛЬНОЙ КОЖИ ПОСЛЕ ОБТЯЖНО-ЗАТЯЖНЫХ ОПЕРАЦИЙ | 2006 |
|
RU2356482C2 |
| CN 102823997 A, 19.12.2012 | |||

