Область техники, к которой относится изобретение
Изобретение относится к области обувного производства, к устройствам предварительной обработки заготовок верха обуви (далее заготовок) из кожи, текстиля и других материалов перед их затягиванием на колодках для придания заготовкам свойств, повышающих качество по ряду физико-механических и гигиенических показателей, в частности формоустойчивости, гигроскопичности, воздухопроницаемости и других.
Уровень техники
Наиболее близкой по технической сущности является выбранное за прототип автоматизированное устройство реверсивного типа для плазменной обработки заготовок верха обуви [патентное изобретение №2542567 С2, МПК А43D 8/00 (2006.01), А43D 95/00 (2006.01), опубликованное 2015 г, бюл. №15], состоящее из рабочей камеры, где в вакууме плазмой обрабатываются заготовки, пары электродов, системы подачи и регулировки плазмообразующего газа, высокочастотного генератора, вакуумного откачного поста, разгрузочно-загрузочной камеры, линейно скомпонованной с рабочей камерой, соединенная с последней и внешней средой системой шлюзов, включающее два робота для загрузки, перемещения внутри камер и разгрузки заготовок, системы продольных опор в каждой камере для установки и транспортирования заготовок.
Обработка заготовки осуществляется следующим образом. В исходном состоянии в рабочей камере происходит обработка заготовок, в разгрузочно-загрузочной камере на передней опоре находится необработанные плазмой заготовки, а задняя опора свободна от заготовок. Обе камеры находятся в условиях вакуумного разрежения и оба шлюза закрыты, сохраняя герметизацию камер.
По завершении плазменной обработки заготовок в рабочей камере открывается межкамерный шлюз и робот переносит обработанные заготовки в разгрузочно-загрузочную камеру, на ее заднюю опору. Затем этот же робот переносит необработанные заготовки с передней опоры разгрузочно-загрузочной камеры в рабочую камеру между плазменными электродами, и после этого закрывается межкамерный шлюз.
В рабочей камере начинается плазменная обработка заготовок.
Параллельно плазменной обработке открывается входной шлюз, и робот переносит с задней опоры обработанные заготовки из разгрузочно-загрузочной камеры на транспортное средство для передачи их на последующие операции. Затем этот же робот переносит подлежащие плазменной обработке заготовки с предшествующей операции на переднюю опору разгрузочно-загрузочной камеры. После этого входной шлюз закрывается и начинается откачка воздуха из разгрузочно-загрузочной камеры.
Причины, препятствующие получению требуемого результата
Прототип имеет ряд недостатков:
- трудность реализации на практике с помощью робота отделения нежесткой заготовки от пачки, поступающей из цеха сборки заготовок, перенос и подвешивание их на передней продольной опоре в разгрузочно-загрузочной камере, где свободное пространство ограничено, так как в ней одновременно находится две партии заготовок, что минимально составляет сорок пар заготовок;
- сложность составляет операция открепления необработанных плазмой заготовок в разгрузочно-загрузочной камере, штучный перенос каждой полупары заготовок по сложной траектории с передней опоры разгрузочно-загрузочной камеры на продольную опору рабочей камеры и закрепление там каждой полупары, что потребует существенных затрат времени и будет сопровождаться ошибками в позиционировании заготовок и сбоями в работе;
- перенос роботом обработанных плазмой заготовок из разгрузочно-загрузочной камеры на место их комплектации также вызовет весь вышеприведенный набор трудностей, включая ошибки в позиционировании и комплектации;
- применение роботов на операциях перемещения, позиционирования, закрепления, открепления нежестких заготовок для выполнения правильных действий потребует применение роботов последнего поколения с функциями осязания, технического зрения, автоматического выбора оптимальной траектории движения при переносе каждой полупары заготовки различного ассортимента, что вызовет несоизмеримые затраты в сравнении со стоимостью плазменной камеры и превышения зарплаты оператора во множество раз;
- переход на новый ассортимент обуви (по назначению, виду, роду) потребует каждый раз перепрограммирования роботов, что связано с дополнительными затратами времени;
- механизация и автоматизация операции отбора заготовок из пачки, комплектование пачек по размерам и видам заготовок, закрепления и открепления заготовок от опор не имеет примеров реализации в мировой практике производства обуви и представляется реально неосуществимым в предложенной конструкции в настоящее время;
- предложенная в прототипе система полупарного отделения заготовок, сбора пачки заготовок, закрепления и открепления заготовок на опорах, множество движений роботов в цикле, все это делает предложенное устройство малопроизводительным и экономически не выгодным, учитывая высокую стоимость применяемых роботов;
- в прототипе имеются две вакуумные камеры, создание и поддерживание низкого давления в них требует значительно времени и дополнительного расхода энергии, что сказывается на производительности установок и стоимости обработки заготовок;
- оператор, обслуживающий прототип, будет недозагружен в течение рабочей смены, так как он только отслеживает процесс и останавливает его в случае сбоя.
Раскрытие изобретения
Технический результат
Задача заявленного изобретения - предложить надежную в работе установку для плазменной обработки заготовок, позволяющую осуществлять мобильный переход на обработку часто изменяемого ассортимента заготовок, где реализуется рационально сочетание труда оператора, автоматического транспортирования заготовок и плазменной обработки, ликвидировать неэффективные затраты на робототехнику, на регулярное перепрограммирование систем управления при смене ассортимента заготовок, сократить потери электроэнергии на поддержание требуемого уровня разрежения в рабочей камере, обеспечить экономическую эффективность работы установки. При этом сохранить традиционную форму комплектации заготовок как после завершения пошива заготовок, так и при передаче обработанных заготовок в цех сборки обуви.
В заявленном изобретении реализуется принцип разумного сочетания работы автоматизированных устройств и труда человека на тех операциях, где пока человек превосходит по своим способностям робототехнические устройства в функциях оценки ситуации, принятия решений, переноса и закрепления нежестких деталей, в быстроте управления по обратной связи.
Предлагаемое изобретение позволит при достижении заданной производительности в несколько раз, сократить финансовые затраты на приобретение двух роботов ценой каждого не менее сто тысяч евро, ликвидировать затраты на регулярное перепрограммирование роботов при смене ассортимента, затраты труда и времени на устранение ошибок роботов при закреплении, освобождении заготовок, их позиционирования, устранить операцию поддержания требуемого разрежения в рабочей камере, где производится плазменная обработка заготовок, уменьшить затраты на отделение заготовок от пачки и комплектации пачек, их связывания и развязывания, что выполнить роботу весьма затруднительно.
Использование предлагаемого изобретения
Изобретение позволит частично ликвидировать ручной труд на данной операции за счет автоматизированного транспортирования контейнера с заготовками в рабочую камеру и обратно из нее на поворотный стол и далее на позицию разгрузки и загрузки, повысит надежность выполнения ряда операций - позиционирования заготовок в процессе загрузки и разгрузки контейнера, отделения полупары заготовки от пачки, комплектация пачек заготовок различного ассортимента с помощью оператора, который выполняет эти и подобные операции с меньшими ошибками, чем робот. Увеличить производительность установки за счет более быстрого и точного позиционирования заготовок, снижения интенсивности отказов особенно на операциях открепления и закрепления заготовок в контейнерах, более быстрого перехода на новый вид ассортимента за счет ликвидации необходимости перепрограммирования роботов для этой цели. Благодаря имеющейся постоянной обратной связи оператор - устройство оператор может осуществлять мгновенный выбор оптимальной траектории переноса заготовок от пачки к контейнеру и обратно, достаточно быстро размещать заготовки по ярусам в контейнере, закреплять и освобождать их. Загруженность оператора в течение рабочего времени трудовым процессом при обслуживании предлагаемой установки не превышает нормативный уровень, установленный правилами охраны труда, в то время как при обслуживании прототипа оператор загружен не полностью.
Предлагаемое изобретение позволит производить плазменную обработку заготовок, не привлекая дополнительный персонал, в согласованном ритме работы заготовочного и сборочного цехов, являясь связующим звеном между ними, при этом выполняя функцию повышения качества обуви.
Сущность изобретения
Изобретение направленно на решение задачи повышения надежности выполнения операции плазменной обработки заготовки, повышения качества изготавливаемой обуви, увеличения производительности установки за счет оптимального сочетания труда оператора, плазменной обработки и использования автоматизированных транспортных средств, при этом обеспечивая согласованность ритма пошивочного заготовочного и сборочного цеха.
Предлагаемое устройство состоит из следующих структурных элементов.
Рабочая камера, в которой происходит плазменная обработка заготовок, включает пару электродов, герметизируемый шлюз на входе/выходе в рабочую камеры, соединения с откачным постом, высокочастотным генератором и системой подачи и регулировки плазмообразующего газа, что в совокупности обеспечивает заданный режим плазменной обработки заготовок. Отличительной особенностью рабочей камеры является наличие направляющих линии пути для движения по нему колес самоходной тележки (далее тележки) с контейнером, заполненным заготовками или без них, причем поперечное сечение направляющих линий пути представляет по форме перевернутую букву «П». Кроме того, на входе рабочей камеры установлены две контактные группы для электрического соединения направляющих линий пути с аналогичными элементами поворотного стола, получающих напряжение от внешних электрошин, смонтированных в цехе предприятия, что обеспечивает подачу электрического напряжения на направляющие линии пути. Рабочая камера имеет один вход/выход и, соответственно, один шлюзовой запор для обеспечения герметичности рабочей камеры в процессе плазменной обработки заготовок.
Применение круглого разгрузочно-загрузочного поворотного стола позволяет вывести оператора из зоны активного электромагнитного облучения, генерируемого в плазменной установке, а также производить загрузку и разгрузку контейнеров одновременно с операцией откачки воздуха из рабочей камеры, что обеспечит повышение производительности. Поворотный стол имеет индивидуальный привод, периодически поворачивающий его на 180 градусов. На поворотном столе, разделенном на две равные секции, проложены направляющие линии пути на каждой его секции. Направляющие линии пути служит для транспортирования тележки с контейнером, наполненным заготовками, в рабочую камеру и обратно. Поворотный стол имеет четыре пары контактных групп для соединения с внешними электрошинами и с контактной группой рабочей камеры для поступления напряжения на направляющие линии пути поворотного стола и передачи напряжения на направляющие линии пути рабочей камеры. Механизм вращения поворотного стола переводит обслуживаемую оператором секцию поворотного стола с контейнером с позиции разгрузки-загрузки заготовки в позицию транспортирования в рабочую камеру и обратно из нее согласно заданной программе или при непосредственном управлении оператором в случае необходимости. Другая секция, оппозитная рабочей камере, часть цикла после транспортирования тележки с необработанными плазмой заготовками в рабочую камеру остается свободной до поступления тележки с обработанными плазмой заготовками, которые при вращении на 180 градусов поворотного стола переходят на позицию разгрузки-загрузки.
Предлагаемая установка снабжена двумя тележками, каждая из которых оснащена платформой для установки контейнера, управляющего контроллера (далее контроллер) и шагового электродвигателем с двухсторонним валом (далее шаговый двигатель), включенным в ведущую ось тележки, что обеспечивает равномерность ее движения. Применение шагового двигателя дает возможность точного позиционирования тележки относительно электродов, работать без обратной связи, осуществлять режим торможения без применения дополнительных механизмов, так как имеется однозначная зависимость положения вала шагового двигателя от входных импульсов, полученных от контроллера. Колеса тележки имеют обода из электроизоляционного материала, например резины, что исключает нахождение тележки и установленного на ней контейнера под напряжением и обеспечивает плавность и бесшумность хода. Подвижный токоприемник и подвижный замыкающий контакт, установленные на тележке, снимающие электрическое напряжение с направляющих линий пути, передают непосредственно электроток на контроллер и шаговый двигатель, минуя корпус тележки и контейнер, что обеспечивает электробезопасность обслуживающего персонала.
Как альтернативный вариант привода предлагается разместить на тележке, кроме шагового двигателя, контроллера, также аккумулятор, применение последнего позволить освободиться от централизованного снабжения направляющих линий пути электропитанием, системы внешней подводки электричества, включая электрошины, подвижного токоприемника, подвижного замыкающего контакта, контактной группы и электропроводки тележки. Вследствие коротких перемещений тележки от поворотного стола к рабочей камере и обратно, невысокой частоты ходов (порядка 20 в смену) и малой массы заготовок, тележки и контейнера емкость аккумулятора, его габариты, масса, как показывают расчеты, будут приемлемыми.
Применение тележек, оснащенных электроприводом, ликвидирует ручное перемещение тележек в рабочую камеру и обратно. На контроллере, установленном на тележке и соединенном электронной связью с шаговым двигателем, осуществляется программирование команд перемещения тележки и ее остановки.
Контейнер для загрузки, размещение заготовок представляет собой конструктивно параллелепипед, боковые стороны которого не выходят за размеры электродов, что обеспечит качественную обработку заготовок. Допускается установка заготовок в несколько параллельных рядов, что не влияет на качество обработки, но позволяет сделать контейнер компактным. Крепление контейнера и тележки выполняется в виде разъемных соединений, чтобы была возможность менять контейнеры при необходимости, например при смене ассортимента заготовок. Контейнер состоит из ярусно расположенных стержней, установленных параллельными рядами на каждом ярусе. Все стержни размещены параллельно электродам, так чтобы подвешенные на них заготовки раскрытыми поверхностями были обращены к электродам. На стержнях разъемными соединениями закреплены зажимы для заготовок. Разъемные соединения позволяют смещать зажимы при изменении ассортимента, например при переходе с мужского на детский. Зажимы конструктивно исполнены в виде подпружиненного шарика, расположенного в полом цилиндре и выступающего частью своей сферы на конце цилиндра, имеющего сужение. Заготовка вставляется между подпружиненным шариком и опорой, где удерживается силой прижатия, создаваемой пружиной. Закрепление заготовки в зажиме производится за одно движение руки оператора и также одним движением оператора освобождается от зажима. Такого рода операции для роботов затруднительны.
Применение тележек, оснащенных электроприводом, заменяет ручное перемещение заготовки с позиции загрузки в рабочую камеру и обратно, а также в сравнении с перемещением роботом обеспечит более надежное и точное выполнение операций разгрузки/загрузки и закрепление/открепление заготовок. Использование в качестве электропривода шагового двигателя с двухсторонним валом дает возможность непосредственного его соединения с ведущей осью тележки, ликвидируя промежуточные звенья, кинематические связи, что упрощает конструкцию, создает условия устойчивого движения тележки с контейнером и сокращает эксплуатационные расходы. Поворотный стол переводит тележку с контейнером на позицию разгрузки-загрузки, обслуживаемой оператором.
На установке монтируется пульт управления, который используется при необходимости (сбой программы) для передачи электромагнитных команд на управляемый контроллер, например включение, выключение шагового двигателя.
Рабочая камера на входе оснащена шлюзом, обеспечивающим ее герметизацию в периоды, установленные технологическим циклом. На нижней поверхности затвора шлюза имеются выступы из упругого материала, по форме соответствующие направляющим линиям пути. При опускании запора шлюза выступы входят в пазы направляющих линий пути, заполняют их, предотвращая тем самым возможность проникновение воздуха в рабочую камеру при ее герметизации.
Снабжение электроэнергией тележек с электроприводом осуществляется от общей энергосистемы предприятия, где переменный ток преобразуется в постоянный. От «плюсовой» электрошины ток подается на одну направляющую пути, связанную с колесами, расположенными на одной стороне тележки. На тележке находится подвижный токоприемник, скользящий по этой направляющей линии пути, располагающейся на соответствующих участках поворотного стола и рабочей камеры.
От токоприемника электрическая энергия подводится к шаговому двигателю тележки и контроллеру, находящемуся на тележке и управляющему ее движению. Ток отводится к «минусовой» электрошине энергосистемы предприятия через другую направляющую линии пути, по которой скользит смонтированный на тележке подвижный замыкающий контакт, также соединенный с контроллером и шаговым двигателем.
Предлагаемая установка оснащена набором устройств, обеспечивающих выполнение ее рабочих функций:
- откачной пост для создания разреженности в рабочей камере;
- система подачи плазмообразующего газа, например аргона, для превращения его в плазму;
- высокочастотный генератор, передающий переменное напряжение на электроды для создания электромагнитного поля, превращающего плазмообразующий газ в плазму;
- контролирующий пульт управления расходом газа, мощностью разряда, рабочим давлением, частотой высокочастотного генератора, продолжительностью обработки.
Предлагаемое устройство отличается тем, что оно снабжено поворотным столом, установленным на входе/выходе рабочей камеры, двумя самоходными тележками, каждая оснащенная котроллером и шаговым двигателем с двухсторонним выходным валом, с размещенными на тележках контейнерами для закрепления и снятия заготовок, направляющими линии пути на поворотном столе и в рабочей камере, соединенными с внешним источником электроэнергии посредством скользящих контактных групп, расположенных на подвижном столе и в рабочей камере, также по направляющим линий пути двигаются колеса тележек, подвижные токоприемники и замыкающие контакты, которые, передают электроэнергию контроллеру и шаговому двигателю.
Предлагаемое устройство снабжено, как вариант, аккумулятором, установленным на тележке, соединенным с контроллером и шаговым двигателем с двухсторонним выходным валом, что обеспечивает автономность привода тележек, при этом отпадает необходимость подачи напряжения от внешних источников питания на направляющие линии пути, установки контактных групп между направляющими в рабочей камере и на поворотных столах.
На нижней поверхности затвора шлюза, напротив направляющих линий пути, имеются выступы из упругого материала, например резины, форма которых обратна форме паза этих направляющих, выступы при опускании затвора шлюза входят в ответные полости направляющих линий пути, что обеспечивает герметизацию рабочей камеры.
Также в предлагаемом устройстве к несущему заготовки обуви стержню контейнера прикреплены разъемными соединениями зажимы, каждый из них включает подпружиненный шарик и оппозитный упор, между которыми за одно движение руки оператора вставляется и зажимается носочная часть заготовки, и также за одно движение руки оператора заготовка освобождается от зажима, при этом сила зажима регулируется винтом.
Осуществление изобретения
Изобретение не вызывает сложности в его осуществлении. Рабочая камера для плазменной обработки состоит из элементов, выпускаемых промышленностью, приобрести и приспособить их для предлагаемого изобретения не составляет трудности. Это электроды, высокочастотный генератор, система подачи газа, шлюзовой запор и другое. В изобретении используется поворотный стол с индивидуальным приводом, работающим по программе или по сигналам с пульта управления, тележка, контейнер - их проектирование и изготовление не представляет сложности в конструкторском бюро и цехе современного машиностроительного завода. Контроллер и шаговый двигатель с двухсторонним валом серийно выпускается промышленностью. Установка направляющих линий пути на поворотных столах и рабочей камере, как и токоприемников и контактных групп, выполнимо в условиях электромеханического цеха.
Краткое описание чертежей
1. Фиг. 1 - Схема автоматизированного устройства обратного хода для плазменной обработки обувных заготовок.
2. Фиг. 2 - Схема тележки с контейнером, шаговым двигателем и котроллером на направляющих линий пути.
3. Фиг. 3 - Зажим для обувных заготовок.
4. Фиг. 4 - Технолограмма автоматизированного устройства обратного хода.
Описание конструкции в статическом состоянии
Предлагаемое устройство состоит из линейно расположенных поворотного стола 1 (фиг. 1) и рабочей камеры 2, которая отделена от внешней среды шлюзом 3, обеспечивающим герметизацию рабочей камеры при откачке воздуха и при плазменной обработке заготовок 4 (фиг. 2). Поворотный стол 1 (фиг. 1) разделен на две равные секции, на каждой проложены направляющие 5 линии пути (аналоги рельсового пути) для передвижения тележки 6 (фиг. 2) с контейнером 7. Эти направляющие 5 на поворотном столе 1 и рабочей камере 2 на концах имеют контактные группы 8 (фиг. 1), предназначенные для коммутации тока между отдельными участками направляющих 5 линий пути с электрошинами 9 энергосистемы предприятия.
Поворотный стол 1 (фиг. 1) многофункционален - секция в позиции, оппозитной оператору, предназначена для загрузки и разгрузки контейнера с заготовками, другая секция в позиции, обращенной к рабочей камере, - для приема тележки 6 с контейнером 7, заполненного обработанными плазмой заготовками, передачи их вместе с тележкой и контейнером на позицию, обслуживаемую оператором, и получение взамен не обработанных плазмой заготовок для последующей передачи в рабочую камеру 2.
Рабочая камера 2 (фиг. 1) имеет два электрода 10, между которыми позиционируется тележка 6 с контейнером 7, загруженным подлежащими обработке заготовками. В рабочей камере 2 проложены направляющие 5 линии пути. Рабочая камера 2 соединена с откачным постом 11, предназначенным для создания в ней разрежения, высокочастотным генератором 12, вырабатывающим переменного напряжения для электродов 10, системой подачи плазмообразующего газа 13, контролирующим пультом управления 14.
В состав предлагаемого устройства входит тележка 6 (фиг. 1, фиг. 2), способная самостоятельно перемещаться по профильным направляющим 5 (фиг. 1, фиг. 2) линий пути. На тележке 6 смонтирован шаговый двигатель 15 (фиг. 2) с двухсторонним валом, приводящий ведущую ось тележки 6 во вращение, котроллер 16 (фиг. 2), в котором записана программа движения тележки 6. Также имеется возможность при необходимости изменять движения тележки 6 (фиг. 1) электромагнитными командами с пульта управления 14 (фиг. 1).
На тележке 6 установлены подвижный токоприемник, скользящий по одной направляющей 5 линии пути, соединенной с «плюсовой» электрошиной системы электроснабжения и подвижный замыкающий контакт, скользящий по другой направляющей 5 линии пути, соединенной с «минусовой» электрошиной. Контроллер 16 (фиг. 2) и шаговый двигатель 15 с двухсторонним валом получают электроток от подсоединенных к источнику питания направляющих 5 линий пути.
На тележке 6 (фиг. 2) установлен контейнер 7 для подвешивания заготовок 4 обуви. Емкость контейнера 7, его габариты определяются количеством заготовок в партии и их видовыми, родовыми, размерными и другими параметрами.
При сменной производительности потока 460 пар/смена и периода обработки на плазменной установке 20 минут количество заготовок в одной партии составит 20 пар.
На колесах тележки 6 имеются обода 17(фиг. 2) из упругого материала, например резина, для электроизоляции корпуса тележки, снятия вибрации и шума.
В контейнере 7 (фиг. 2) несущие стержни 18 расположены ярусно так, чтобы в рабочей камере они находились параллельно электродам, а подвешенные заготовки 4 своими раскрытыми поверхностями - лицевой и подкладочными сторонами - были обращены к электродам.
На стержнях 18 (Фиг. 3) зажимы 19 для заготовок крепятся разъемными соединениями, чтобы была возможность регулировать расстояние между зажимами при переходе, например, с детского на мужской ассортимент заготовок.
Зажим содержит подпружиненный шарик 20 (Фиг. 3), заключенный в полый цилиндр 21 и выступающий частью своей сферы с одной стороны полого цилиндра. Напротив выступающей части сферы шарика находится упор, между которым и шариком вставляется носочная часть заготовки. Заготовки удерживаются усилием прижатия пружин 22 (Фиг. 3), сообщаемого шарику. Прижимающее усилие регулируется вращением винта 23.
Устройство в динамическом состоянии
За исходное принимаем состояние предлагаемого устройства, когда в рабочей камере 2 (фиг. 1) происходит плазменная обработка заготовок, подвешенных в контейнере 7, установленном на тележке 6. Рабочая камера 2 находятся в состоянии вакуумного разрежения, созданного откачным постом 11 при закрытом шлюзе 3, электроды 10 получают переменное напряжение от высокочастотного генератора 12, подпитка газом рабочей камеры 2 осуществляется системой подачи плазмообразующего газа 13. Общий контроль и управление аппаратурой производится посредством пульта управления 14.
В исходном состоянии на поворотном столе 1 (фиг. 1) секция, обращенная к рабочей камере 2, не заполнена, на ней нет тележки с контейнером, а на секции, оппозитной оператору, располагается тележка с контейнером, заполненным не обработанными плазмой заготовками. По завершении плазменного воздействия на заготовку в рабочей камере 2 (фиг. 1) открывается шлюз 3 и тележка 6 с контейнером 7, заполненным уже обработанными плазмой заготовками, под действием собственного привода перемещается по направляющим 5 линии пути на свободную секцию поворотного стола 1 (фиг. 1). Затем поворотный стол 1 совершает вращательные движения на 180° и секция поворотного стола с обработанными заготовками, подвешенными в контейнере, находящемся на тележке, становится на позицию разгрузки-загрузки у оператора, одновременно находящаяся напротив оператора тележки с контейнером, заполненным необработанными плазмой заготовками, поворачивается на 180° вместе с секцией поворотного стола, на которой она находится, и встает напротив рабочей камеры 2. Шаговый двигатель 15 (фиг. 2) с двухсторонним валом приводит в движение тележку 6 с контейнером 7, наполненным необработанными заготовками, перемещая их в рабочую камеру 2 (фиг. 1). Опускается запор шлюза 3, происходит герметизация рабочей камеры. Включается откачной пост 14 (фиг. 1) и создается воздушное разрежение в рабочей камере 2. При достижении заданного пониженного давления в рабочей камере 2 высокочастотный генератор 12 подает напряжение на электроды 10 и газ, поступающий из системы подачи плазмообразующего газа 13 в рабочую камеру 2, образует плазму, воздействующую на заготовки обуви, находящиеся в рабочей камере 2, одновременно контейнер с ранее обработанными плазмой заготовками, находящийся на тележке, перемещается при вращении на 180° поворотного стола напротив оператора и разгружается последним - заготовки снимаются со стержней контейнера и складываются в пачки для последующей передачи в сборочный цех обуви. Затем пачки не обработанных плазмой заготовок, поступившие из заготовочного цеха, развязываются оператором, полупары заготовки отделяются от пачки, последовательно переносятся к контейнеру, подвешиваются оператором в зажимы 19 (фиг. 2), укрепленные на стержнях 18 (фиг. 2) контейнера. Оператор вставляет носочную часть заготовки между шариком 20 (фиг. 3) и упором, пружина 22, находящаяся, как и шарик 20, в полом цилиндре 21, обеспечивает усилие зажима заготовки, которое регулируется винтом 23.
Цикл работы предлагаемого устройства отражен на технолограмме (фиг. 4)
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОЛУАВТОМАТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ПЛАЗМЕННОЙ ОБРАБОТКИ ОБУВНЫХ ЗАГОТОВОК | 2016 |
|
RU2628982C1 |
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО ПРОХОДНОГО ТИПА ДЛЯ ПЛАЗМЕННОЙ ОБРАБОТКИ ЗАГОТОВОК ВЕРХА ОБУВИ | 2013 |
|
RU2556166C2 |
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО РЕВЕРСИВНОГО ТИПА ДЛЯ ПЛАЗМЕННОЙ ОБРАБОТКИ ЗАГОТОВОК ВЕРХА ОБУВИ | 2013 |
|
RU2542567C2 |
| Способ создания здоровьесберегающей обуви | 2019 |
|
RU2729536C1 |
| АГРЕГАТ ДЛЯ АВТОМАТИЗИРОВАННОГО ВЫПОЛНЕНИЯ ПОДГОТОВИТЕЛЬНО-РАСКРОЙНЫХ ОПЕРАЦИЙ | 2012 |
|
RU2494180C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ДЕФОРМАЦИИ И БОЛЕВОГО ПОРОГА СЖАТИЯ БОКОВОЙ ПОВЕРХНОСТИ СТОПЫ | 2014 |
|
RU2584115C2 |
| СПОСОБ ОБРАБОТКИ ЗАГОТОВКИ ВЕРХА ОБУВИ ИЗ НАТУРАЛЬНОЙ КОЖИ ПОСЛЕ ОБТЯЖНО-ЗАТЯЖНЫХ ОПЕРАЦИЙ | 2006 |
|
RU2356482C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ НАНЕСЕНИЯ МНОГОСЛОЙНЫХ ПОКРЫТИЙ НА ЛИСТОВОЕ СТЕКЛО | 2005 |
|
RU2297988C1 |
| АВТОНОМНАЯ СБОРОЧНАЯ МОДУЛЬНАЯ ЯЧЕЙКА | 2021 |
|
RU2755994C1 |
| СПОСОБ ОБРАБОТКИ НАТУРАЛЬНОЙ КОЖИ С ДЕФЕКТОМ ОТДУШИСТОСТИ | 2011 |
|
RU2460805C1 |


Автоматизированное устройство обратного хода для плазменной обработки обувных заготовок высокочастотной плазмой пониженного давления содержит рабочую камеру, пару электродов, шлюзовые запорные устройства плазменной камеры, системы подачи и регулировки плазмообразующего газа, высокочастотный генератор, вакуумный откачной пост, систему перемещения заготовок, систему загрузки и загрузки, причем оно снабжено поворотным столом, установленным на входе/выходе рабочей камеры, двумя самоходными тележками, каждая оснащенная котроллером и шаговым двигателем с двухсторонним выходным валом, с размещенными на тележках контейнерами для закрепления и снятия заготовок, направляющими линий пути на поворотном столе и в рабочей камере, соединенными с внешним источником электроэнергии посредством скользящих контактных групп, расположенных на поворотном столе и рабочей камере, системой подвижных токоприемников и подвижных замыкающих контактов, которые, скользя по направляющим линии пути, получают электроэнергию и передают ее контроллеру и шаговому двигателю. Технический результат заключается в исключении регулярного перепрограммирования систем управления при смене ассортимента заготовок, сокращении потерь электроэнергии. 3 з.п. ф-лы, 4 ил.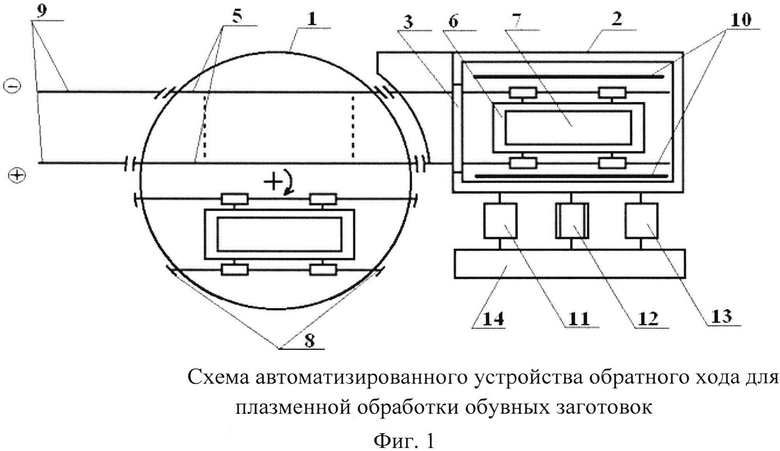
1. Автоматизированное устройство обратного хода для плазменной обработки обувных заготовок высокочастотной плазмой пониженного давления, содержащее рабочую камеру, пару электродов, шлюзовые запорные устройства плазменной камеры, системы подачи и регулировки плазмообразующего газа, высокочастотный генератор, вакуумный откачной пост, систему перемещения заготовок, систему загрузки и загрузки, отличающееся тем, что оно снабжено поворотным столом, установленным на входе/выходе рабочей камеры, двумя самоходными тележками, каждая оснащенная котроллером и шаговым двигателем с двухсторонним выходным валом, с размещенными на тележках контейнерами для закрепления и снятия заготовок, направляющими линий пути на поворотном столе и в рабочей камере, соединенными с внешним источником электроэнергии посредством скользящих контактных групп, расположенных на поворотном столе и рабочей камере, системой подвижных токоприемников и подвижных замыкающих контактов, которые, скользя по направляющим линии пути, получают электроэнергию и передают ее контроллеру и шаговому двигателю.
2. Устройство по п. 1, отличающееся тем, что снабжено аккумулятором, установленным на тележке, соединенным с контроллером и шаговым двигателем с двухсторонним выходным валом, что обеспечивает автономность привода тележек, при этом отпадает необходимость подачи напряжения от внешних источников питания на направляющие линии пути, установки контактных групп между направляющими линий пути в рабочей камере и на поворотном столе.
3. Устройство по п. 1, отличающееся тем, что на нижней поверхности запора шлюза, напротив направляющих линий пути, имеются выступы из упругого материала, например резины, форма которых обратна форме паза направляющих, выступы при опускании затвора шлюза входят в ответные полости направляющих линий пути, что обеспечивает герметизацию рабочей камеры.
4. Устройство по п. 1, отличающееся тем, что к несущему заготовки обуви стержню контейнера прикреплен разъемным соединением зажим, включающий подпружиненный шарик и оппозитный упор, между которыми за одно движение руки оператора вставляется и зажимается носочная часть заготовки, и также за одно движение оператора заготовка освобождается от зажима, сила зажима регулируется винтом.
| RU 2013100117 A, 20.07.2014 | |||
| СПОСОБ ОБРАБОТКИ КОЖ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1996 |
|
RU2102488C1 |
| Устройство для обработки деталей низа обуви | 1978 |
|
SU791374A1 |
| CN 102823997 B, 15.07.2015. | |||

