Изобретение относится к контрольно-измерительной технике и может быть использовано для контроля и измерения углового положения как горизонтальных, так и вертикальных поверхностей изделий.
Для контроля горизонтальных поверхностей широко используются пузырьковые строительные уровни. Основной их недостаток - отсутствие возможности измерения уклона исследуемой поверхности и визуализации результатов.
Известен электронный уровень [Патент №2435135 РФ, МПК G01C 9/06. Электронный уровень / Шупейкин П.И.], содержащий блок обработки сигналов, линейку многоэлементного фотоприемника, отвес в составе излучателя, генератор тактовых импульсов, два выходных регистра. Электронный уровень выполняет автоматическое измерение угла наклона поверхности и выдает результаты на табло блока индикации.
Недостатки изобретения - контроль горизонтальности поверхности только по одной координате, а также сложность восприятия результатов в связи с тем, что знак угла наклона не индицируется на табло.
Известен электронный уровень [Патент №2453811 РФ, МПК G01C 9/06. Электронный уровень / Шупейкин П.И.], который содержит блок обработки сигналов, блок излучателя, матрицу приборов с зарядовой инжекцией и плоскопанельный дисплей. В устройстве контроль горизонтальности поверхности выполняется синхронно по двум координатам, а отклонения от горизонтали визуально наблюдаются на экране плоскопанельного дисплея. Однако с помощью данного устройства невозможно оперативно в цифровом виде получать результаты измерений, а также количественно оценивать пространственный угол контролируемой поверхности, так как контроль уровня поверхности осуществляется только по двум осям и только горизонтальной поверхности.
Наиболее близким к заявленному изобретению является электронный уровень [Находов В. Электронный уровень // Радио. 2009. №8. С.39], который состоит из трехосевого акселерометра, микроконтроллера, транзисторов для согласования уровней напряжения. Углы наклона вычисляются по результатам измерения проекций вектора ускорения земного притяжения на каждую из трех осей акселерометра: X (горизонтальную продольную), Y (горизонтальную поперечную) и Z (вертикальную). Микроконтроллер в соответствии с записанной в него программой управляет акселерометром, получает от него и обрабатывает информацию об углах наклона, выводит результаты на жидкокристаллический индикатор.
Недостатком данного устройства является невысокая точность, низкая устойчивость к помехам и к вибрациям, вследствие этого устройство имеет ограничения для использования на подвижных и вибрирующих объектах. Также, используя данный прибор, при условии, что он расположен в строго горизонтальной плоскости, невозможно измерять угол поворота электронного уровня в плоскости, что может потребоваться для разметки и контроля параллельности прямых (или изделий) на контролируемой поверхности.
Техническими результатами являются измерение и контроль уклона как горизонтальных, так и вертикальных поверхностей одновременно по трем направлениям, измерение угла поворота электронного уровня-уклономера в горизонтальной и вертикальной плоскостях, а также повышение точности и помехоустойчивости измерений угловых отклонений поверхностей.
Сущность изобретения в том, что в электронный уровень-уклономер, содержащий трехосевой акселерометр, три блока предварительной обработки, микроконтроллер, индикатор и блок клавиатуры, вводятся два трехосевых акселерометра и шесть блоков предварительной обработки, при этом первые два трехосевые акселерометра расположены в корпусе устройства в одной горизонтальной плоскости таким образом, что горизонтальная продольная, горизонтальная поперечная и вертикальные оси второго акселерометра направлены противоположно соответствующим осям первого акселерометра, а третий акселерометр расположен под углом не более 85° к горизонтальной плоскости, в которой лежат первые два акселерометра, таким образом, что горизонтальная продольная ось третьего акселерометра совпадает с соответствующей осью первого акселерометра. Таким образом, за счет введения второго трехосевого акселерометра, оси которого направлены противоположно осям первого, и компенсации мешающих факторов в процессе совместной обработки микроконтроллером измерительных сигналов с двух акселерометров будет повышена точность и помехоустойчивость контроля и измерений угловых отклонений поверхностей. А за счет введения третьего трехосевого акселерометра, расположенного под углом к горизонтальной плоскости, в которой лежат первые два акселерометра, появляется возможность измерять углы поворота электронного уровня-уклономера в горизонтальной и вертикальной плоскостях.
Сущность изобретения поясняется чертежами.
На фиг.1 показана структурная схема электронного уровня-уклономера. Взаимное расположение трехосевых акселерометров показано на фиг.2. В состав электронного уровня-уклономера входят: 1, 2, 3 - трехосевые акселерометры; 4, 5, 6, 7, 8, 9, 10, 11, 12 - блоки предварительной обработки; 13 - микроконтроллер; 14 - индикатор; 15 - блок клавиатуры.
Электронный уровень-уклономер содержит трехосевой акселерометр 1, подключенный через три блока предварительной обработки 4, 5, 6 к микроконтроллеру 13, индикатор 14 и блок клавиатуры 15. В устройство дополнительно введены два трехосевых акселерометра 2, 3 и шесть блоков предварительной обработки 7, 8, 9, 10, 11, 12. Три выхода каждого из акселерометров 1, 2, 3 через блоки предварительной обработки 4, 5, 6, 7, 8, 9, 10, 11, 12 соединены с соответствующими входами микроконтроллера 13, выходы микроконтроллера 13 соединены со входами индикатора 14, а выходы блока клавиатуры 15 соединены со входами микроконтроллера 13. При этом трехосевые акселерометры 1, 2 расположены в корпусе устройства в одной горизонтальной плоскости таким образом, что горизонтальная продольная, горизонтальная поперечная и вертикальные оси акселерометра 2 направлены противоположно соответствующим осям акселерометра 1. Трехосевой акселерометр 3 расположен под углом не более 85° к горизонтальной плоскости, в которой лежат акселерометры 1 и 2, таким образом, что горизонтальная продольная ось акселерометра 3 совпадает с соответствующей осью акселерометра 1.
Электронный уровень-уклономер работает следующим образом. Электронный уровень-уклономер располагают на контролируемой поверхности. При отклонении поверхности от строго горизонтальной или вертикальной чувствительные элементы акселерометров реагируют на изменения проекций вектора ускорения земного притяжения (G) на каждую из трех осей акселерометров 1, 2, 3, вследствие этого на выходах акселерометров будут напряжения, пропорциональные проекциям вектора G на соответствующие оси. Сигналы со всех выходов акселерометров 1, 2, 3 через блоки предварительной обработки 4, 5, 6, 7, 8, 9, 10, 11, 12 поступают на соответствующие входы микроконтроллера 13. Микроконтроллер 13 в соответствии с записанной программой производит обработку полученных измерительных сигналов. Значения уклона контролируемой поверхности по трем координатам отображаются на индикаторе 14 в градусах. Для отображения результатов измерений на индикаторе учитывается знак по каждой из трех осей в соответствии со значениями, получаемыми с акселерометра 1. Клавиатура 15 используется для установки нуля отдельно по каждой из координат, для запоминания результатов, для выбора режима измерения (быстродействующий и прецизионный).
В первом режиме работы на индикаторе 14 отображаются значения пространственного угла по трем координатам в градусах, полученные в результате программной обработки микроконтроллером сигналов с акселерометров, и обновляются через установленный интервал времени (0,1; 0,25 или 0,5 с). Уменьшение, исключение помех из результата измерения осуществляется методами противопоставления и усреднения в соответствии с предварительно записанной в память микроконтроллера программой.
Во втором режиме работы, прецизионном, подавление помех, например, связанных действием вибраций, осуществляется следующим образом. Микроконтроллер 13 в соответствии с записанной в его памяти программой измеряет частоту сигнала и осуществляет опрос акселерометров через интервалы времени, равные половине периода сигнала помехи, т.е. в противофазе. За счет этого метода и усреднения результатов, накопленных за заданный интервал времени, погрешность, вызванная вибрацией, будет приближаться к нулю и повыситься устойчивость устройства к помехам.
Измерение углов поворота электронного уровня-уклономера в горизонтальной плоскости относительно оси Z осуществляется следующим образом. В случае помещения электронного уровня в строго горизонтальную плоскость сигналы с соответствующих выходов акселерометров 1 и 2 будут пропорциональны нулевым проекциям вектора G на оси X и Y. Однако ось Z акселерометра 3 будет иметь угол с вектором G. Поэтому при повороте электронного уровня-уклономера в горизонтальной плоскости относительно оси Z на соответствующих выходах акселерометра 3 будут сигналы, пропорциональные углам поворота, а на индикаторе будут отображаться значения этих углов относительно осей X и Y. Это возможно за счет расположения акселерометра 3 под углом к горизонтальной плоскости, в которой расположены акселерометры 1, 2.
Прибор имеет два варианта конструктивного исполнения. Первый вариант - портативный электронный уровень и уклономер с автономным питанием, пригодный для контроля горизонтальных и вертикальных поверхностей изделий. Второй - модуль электронного уровня-уклономера для оснащения стационарных и подвижных объектов. Электронный уровень-уклономер в качестве модуля может использоваться в контрольно-измерительных системах различного назначения и подходит для использования с промышленным и медицинским оборудованием, требующим контроля своего положения.
Таким образом, предложенный электронный уровень-уклономер позволяет контролировать уровень и уклон как горизонтальных, так и вертикальных поверхностей, измерять отклонения по трем осям и отображать полученные результаты на индикаторе, а простые конструкторско-технологические и алгоритмические решения улучшают эксплуатационные характеристики, повышают точность измерений в условиях действия помех, вибраций.
ЛИТЕРАТУРА
1. Патент №2435135 РФ, МПК G01C 9/06. Электронный уровень / Шупейкин П.И.
2. Патент №2453811 РФ, МПК G01C 9/06. Электронный уровень / Шупейкин П.И.
3. Находов В. Электронный уровень // Радио. 2009. №8. С.39.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ | 2014 |
|
RU2572434C1 |
| СПОСОБ И СИСТЕМА ИЗМЕРЕНИЯ УКЛОНОВ ДЛЯ ПОЗИЦИОНИРОВАНИЯ ОБЪЕКТОВ | 2008 |
|
RU2382986C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ РАБОЧЕГО ОРГАНА МАШИНЫ | 2014 |
|
RU2566153C1 |
| ДАТЧИК УГЛА НАКЛОНА | 2011 |
|
RU2475703C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ АВАРИЙНОГО ПЕРЕГРЕВА ШИН И ТОРМОЗОВ АВТОМОБИЛЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2513439C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ МОРСКИХ ВОЛН С БОРТА ДВИЖУЩЕГОСЯ СУДНА | 2010 |
|
RU2439494C1 |
| ИНЕРЦИАЛЬНОЕ УСТРОЙСТВО И СПОСОБЫ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ЭЛЕКТРОННЫМИ СИСТЕМАМИ | 2015 |
|
RU2648938C2 |
| Система для мониторинга искусственных сооружений высокоскоростной магистрали | 2018 |
|
RU2698419C1 |
| ТЕРМИНАЛ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2537892C1 |
| ЭЛЕКТРОННОЕ УСТРОЙСТВО МОНИТОРИНГА И КОРРЕКЦИИ ОСАНКИ (ВАРИАНТЫ) | 2021 |
|
RU2810404C2 |

Изобретение относится к устройствам для измерения уклонов и может быть использовано для контроля и измерения углового положения как горизонтальных, так и вертикальных поверхностей. Сущность: уровень-уклономер содержит три трехосевых акселерометра, каждый из которых через три соответствующих блока предварительной обработки соединен с микроконтроллером. Выходы микроконтроллера соединены со входами индикатора, а входы микроконтроллера - с выходами блока клавиатуры. Первый и второй трехосевые акселерометры расположены в корпусе устройства в одной горизонтальной плоскости. Причем горизонтальная продольная, горизонтальная поперечная и вертикальная оси второго акселерометра направлены противоположно соответствующим осям первого акселерометра. Третий акселерометр расположен под углом не более 85° к горизонтальной плоскости, в которой лежат первые два акселерометра. Причем горизонтальная продольная ось третьего акселерометра совпадает с соответствующей осью первого акселерометра. Технический результат: измерение и контроль уклона как горизонтальных, так и вертикальных поверхностей одновременно по трем направлениям, измерение угла поворота электронного уровня-уклономера в горизонтальной и вертикальной плоскостях, а также повышение точности и помехоустойчивости измерений угловых отклонений поверхностей. 2 ил.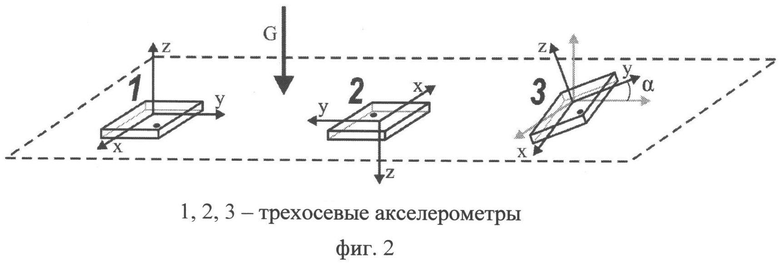
Электронный уровень-уклономер, содержащий трехосевой акселерометр, подключенный через три блока предварительной обработки к микроконтроллеру, индикатор и блок клавиатуры, отличающийся тем, что в устройство дополнительно введены два трехосевых акселерометра и шесть блоков предварительной обработки, причем три выхода каждого из акселерометров через соответствующие блоки предварительной обработки соединены с соответствующими входами микроконтроллера, выходы микроконтроллера соединены со входами индикатора, а выходы блока клавиатуры соединены со входами микроконтроллера, при этом первый и второй трехосевые акселерометры расположены в корпусе устройства в одной горизонтальной плоскости таким образом, что горизонтальная продольная, горизонтальная поперечная и вертикальная оси второго акселерометра направлены противоположно соответствующим осям первого акселерометра, а третий акселерометр расположен под углом не более 85° к горизонтальной плоскости, в которой лежат первые два акселерометра, таким образом, что горизонтальная продольная ось третьего акселерометра совпадает с соответствующей осью первого акселерометра.
| СПОСОБ ИЗМЕРЕНИЯ УКЛОНОВ И ЦИФРОВОЙ ИЗМЕРИТЕЛЬ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2227899C1 |
| В.Находов | |||
| Электронный уровень / Радио, 2009, N8, стр.39 | |||
| CN 203203589 U, 18.09.2013 | |||

