Текст описания в факсимильном виде (см. графическую часть).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА ИЗМЕРЕНИЯ УКЛОНОВ ДЛЯ ПОЗИЦИОНИРОВАНИЯ ОБЪЕКТОВ | 2008 |
|
RU2382986C2 |
| СПОСОБ ДИСТАНЦИОННОЙ КАЛИБРОВКИ АКСЕЛЕРОМЕТРА В СОСТАВЕ ИЗМЕРИТЕЛЬНОГО ПРЕОБРАЗОВАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2272299C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ СКОРОСТИ И ТРАЕКТОРИИ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА ПО ЗАРЕГИСТРИРОВАННЫМ ДАННЫМ ПРИ ДОРОЖНО-ТРАНСПОРТНОМ ПРОИСШЕСТВИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2232097C1 |
| СПОСОБ ДИСТАНЦИОННОГО ТЕСТИРОВАНИЯ БЛОКА АКСЕЛЕРОМЕТРОВ В СОСТАВЕ ИЗМЕРИТЕЛЬНОГО ПРЕОБРАЗОВАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2271015C1 |
| ЦИФРОВОЙ ИЗМЕРИТЕЛЬ УКЛОНОВ | 2000 |
|
RU2166732C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ОБЪЕКТА В ТОЧКЕ ОСТАНОВА | 1993 |
|
RU2062872C1 |
| ТРЕХКООРДИНАТНЫЙ АКСЕЛЕРОМЕТР | 2008 |
|
RU2376607C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ГЕОГРАФИЧЕСКИЙ СЕВЕР С ИСПОЛЬЗОВАНИЕМ МОЛЕКУЛЯРНО-ЭЛЕКТРОННОГО ДАТЧИКА УГЛОВЫХ СКОРОСТЕЙ И ДАТЧИКА УГЛА НАКЛОНА | 2014 |
|
RU2578049C1 |
| ГРАВИМЕТРИЧЕСКАЯ ИЗМЕРИТЕЛЬНАЯ СИСТЕМА | 1998 |
|
RU2149429C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА ОТНОСИТЕЛЬНО ВЕКТОРА СИЛЫ ТЯЖЕСТИ И СПОСОБ ЕГО ИСПОЛЬЗОВАНИЯ | 2007 |
|
RU2343418C1 |
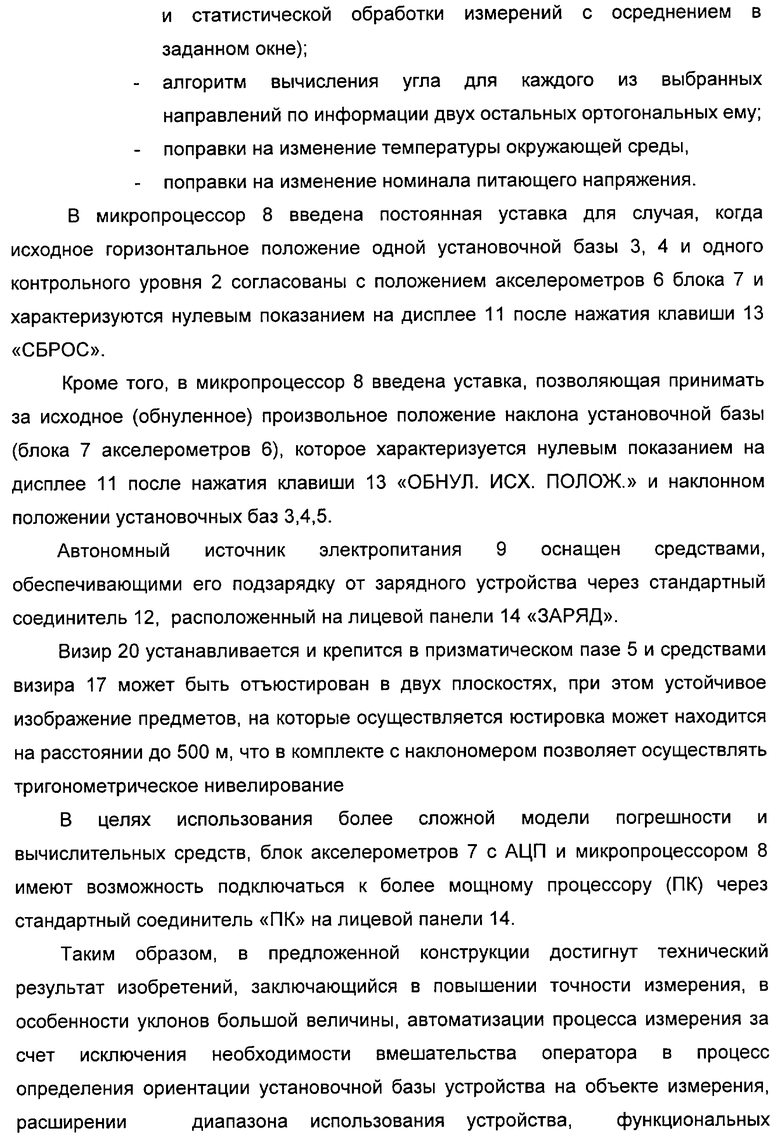

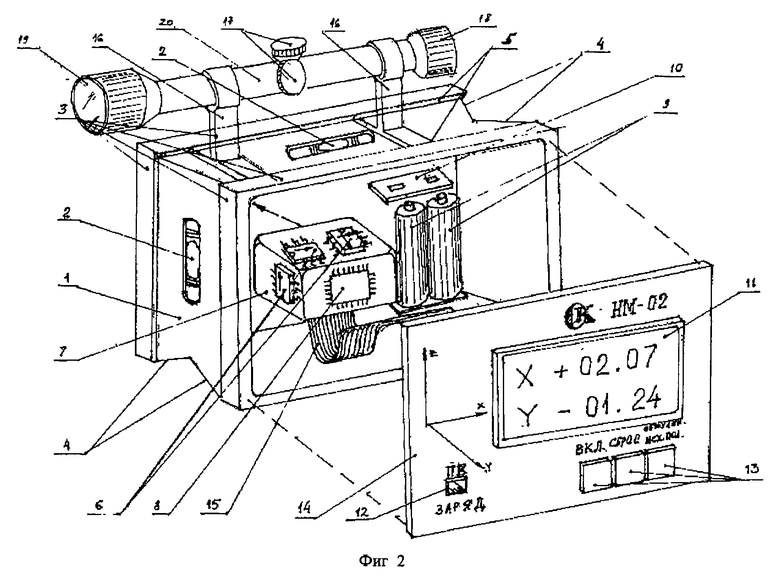
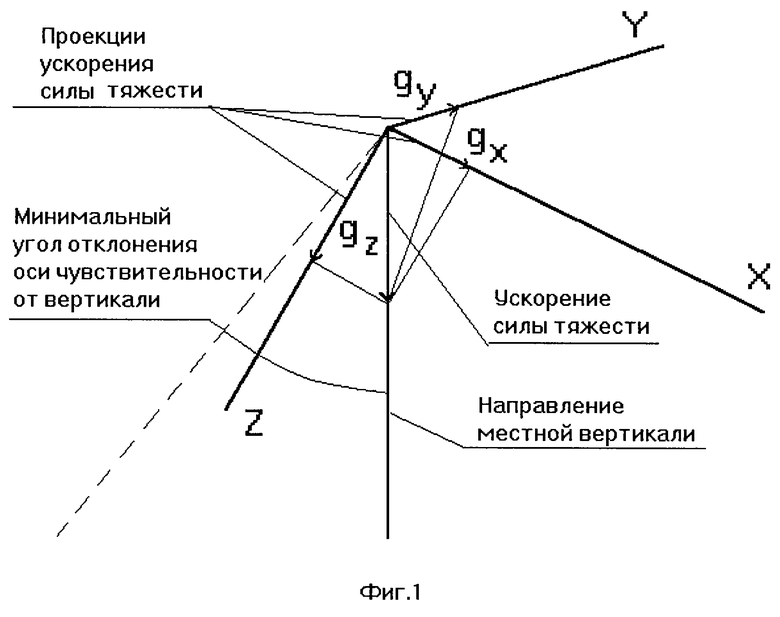
Изобретения относятся к измерительной технике, в частности к устройствам для определения углов наклона объектов и оборудования в строительстве, промышленности и в быту, преимущественно наклона плоскостей этих объектов относительно горизонта. Способ измерения уклонов включает измерение величины проекции ускорения свободного падения на ось чувствительности преобразователя величины линейного ускорения в выходной сигнал, определение положения преобразователя относительно горизонтальной плоскости или местной вертикали, по которому судят о величине уклонов. Измеряют величины проекций ускорения свободного падения в направлении трех взаимно ортогональных осей чувствительности к величинам линейных ускорений. Положение преобразователя относительно горизонтальной плоскости или местной вертикали определяют по величинам проекций ускорения свободного падения в направлении двух из этих осей, которые выбирают при достижении третьей осью направления, заданного допустимым углом отклонения любой оси чувствительности от местной вертикали. Цифровой измеритель уклонов содержит снабженный установочным узлом корпус, в котором размещены инерционный измеритель ускорения силы тяжести с электронной схемой преобразования сигнала инерционного измерителя в визуальную информацию об уклонах, автономный источник электропитания электронной схемы. Установочный узел корпуса выполнен в виде пяти плоских установочных баз, из которых три ортогональны друг другу, две параллельны им, двух взаимно перпендикулярных призматических установочных баз, параллельных соответствующим плоским установочным базам. Инерционный измеритель ускорения силы тяжести выполнен трехкоординатным и закреплен жестко относительно установочных баз. В электронную схему преобразования сигнала измерителя введен микропроцессор с моделью погрешности определения положения установочных баз и инерционного измерителя ускорения силы тяжести. Технический результат состоит в повышении точности измерения уклонов, автоматизации процесса измерения, повышении оперативности получения измерительной информации, расширении диапазона использования устройства. 2 с. и 5 з.п.ф-лы, 2 ил.
| ЦИФРОВОЙ ИЗМЕРИТЕЛЬ УКЛОНОВ | 2000 |
|
RU2166732C1 |
| Способ придания алюминию способности свариваться | 1926 |
|
SU12607A1 |
| US 4486844 А, 04.12.1984 | |||
| US 4219940 A, 02.09.1980 | |||
| US 3974699 А, 17.08.1976 | |||
| СИГНАЛИЗАЦИЯ ЗАГОЛОВКА ИЗОБРАЖЕНИЯ ПРИ КОДИРОВАНИИ ВИДЕО | 2020 |
|
RU2819585C1 |

