Область техники, к которой относится изобретение
Изобретение относится к области управления воздушным движением и может быть использовано в системах зависимого наблюдения для защиты от постоянно возрастающих угроз кибератак наземной аэронавигационной инфраструктуре управления и организации воздушного движения (УВД/ОрВД), а также бортовому оборудованию пилотируемых и беспилотных летательных аппаратов различной ведомственной принадлежности.
Уровень техники
Известны аналоги предлагаемого изобретения. Так, в патенте РФ №2542746) задача повышения эффективности систем управления безопасностью полетов основывается на введении в бортовое оборудование воздушных судов системного процессора, который объединен с бортовой системой объективного контроля, бортовой и наземной аппаратурой моноимпульсных вторичных радиолокаторов, работающих в дискретно-адресном режиме и модернизированных до режима «8», радиовещательного автоматического зависимого наблюдения, аппаратурой международной системы спасания терпящих бедствие КОСПАС-САРСАТ, устанавливаемой на навигационных искусственных спутниках Земли Глонасс-К1 и его модификациях. Системный процессор обеспечивает формирование признаков наличия или отсутствия целостности воздушных судов с последующей передачей их экипажу, центрам управления и спасания на основе указанного объединения, что позволяет осуществлять в реальном масштабе времени упреждающие, коррективные действия, необходимые для поддержания требуемого уровня безопасности полетов от взлета до посадки.
В аналоге по патенту РФ №2333538 задача повышения эффективности систем управления безопасностью полетов достигается наличием, на каждом из наблюдаемых подвижных или стационарных объектов, измерителей координат местоположения и параметров движения, приемопередающих радиостанций, которые ведут передачу в один или несколько общих каналов в заранее отведенный для этого отрезок времени, начало которого точно фиксировано на шкале единого времени. Передаваемое сообщение определенного вида содержит идентификатор источника сообщения, данные о координатах местоположения станции, параметрах движения, а также дополнительную информацию. На каждой подвижной приемопередающей радиостанции, а также на базовой радиостанции вычисляют разности между собственными координатами и координатами передающей радиостанции на момент получения сообщения и расстояние до соответствующей подвижной передающей радиостанции, а по величине задержки принятого кодированного сообщения вычисляют соответствующую псевдодальность, разность между псевдодальностью и указанным расстоянием. При превышении абсолютной величиной модуля этой разности допустимого значения принимают решение о недостоверности переданных координат, соответствующей радиостанции присваивают признак недостоверности, а на экране собственного индикатора соответствующую отметку отображают особым символом.
Наиболее близким по технической сущности аналогом способа и устройства контроля достоверности данных системы автоматического зависимого наблюдения является изобретение по патенту РФ №2667494. Изобретение относится к области навигации летательных аппаратов (ЛА), предназначено для обеспечения безопасности полетов ЛА путем использования системы автоматического зависимого наблюдения (АЗН) на борту ЛА. Достигаемый технический результат - повышение помехоустойчивости системы АЗН на основе повышения достоверности ее данных. Повышение достоверности данных АЗН достигается тем, что предусматривается совместное использование системы АЗН и спутниковой навигационной системы (СНС), прием сигналов СНС и определение координат и вектора скорости своего ЛА, прием сигналов АЗН и определение координат соседних ЛА, вычисление дальностей соседних ЛА по определенным координатам, формирование временной шкалы и измерение дальностей соседних ЛА по времени задержки сигналов АЗН, сравнение разности упомянутых вычисленных и измеренных дальностей с заданным порогом, в случае превышения упомянутой разностью заданного порога проводят формирование сигнала недостоверности данных АЗН и отображение сигнала недостоверности на индикаторе воздушной обстановки, при этом в соответствии с упомянутой временной шкалой формируют сигналы АЗН и проводят их излучение, далее выявляют опасные траектории соседних ЛА, формируют сигнал модуляции и выполняют этим сигналом модуляцию координат своего ЛА, ведут обнаружение сигнала модуляции в координатах соседних ЛА на опасных траекториях, а при обнаружении такой модуляции формируют дополнительный сигнал недостоверности данных АЗН и отображают дополнительный сигнал недостоверности на индикаторе воздушной обстановки.
Однако для этих способов характерна избыточность оборудования, которая ведет к увеличению стоимости и нерентабельности использования на дешевых беспилотных ЛА.
Раскрытие сущности изобретения
Изобретение относится к области навигации летательных аппаратов (ЛА) и предназначено для управления воздушным движением и обеспечения безопасности полетов ЛА путем использования сигналов автоматического зависимого наблюдения (АЗН). Существенный недостаток АЗН заключается в низкой помехоустойчивости и в отсутствии защиты от специально организованных помех (например, от ложных целей).
Задачей изобретения является создание способов и устройств контроля достоверности данных системы автоматического зависимого наблюдения. Технический результат изобретения заключается в повышении безопасности полетов за счет увеличения защищенности к ложным сигналам.
Указанная задача решается за счет того, что при формировании сквиттеров бортовым оборудованием АЗН-В используют устройства, реализующее способ, включающий в себя передачу точного времени излучения сквиттера и вычисление точного времени приема этого сквиттера, что позволяет наземной станции АЗН-В точно измерять дальность до воздушного судна. Затем измеренную дальность сравнивают с принятой в сообщении, если в результате сравнения измеренное значение отличается от принятого на величину большую установленного порога, то вырабатывают сигнал недостоверности принятого оборудованием АЗН-В сообщения.
Согласно изобретению, в первом варианте способ контроля достоверности данных системы автоматического зависимого наблюдения включает в себя этапы, на которых:
а) формируют тактовую последовательность, инициирующую процесс формирования сквиттеров;
б) выполняют генерацию случайных чисел, которую используют для установки счетчика вобуляции;
в) выполняют вобуляцию импульсов тактовой последовательности, инициирующей процесс формирования сквиттеров;
г) формируют информационный сквиттер;
д) записывают в сквиттер время глобальной навигационной спутниковой системы (ГНСС);
ж) передают сквиттер на землю;
з) декодируют сквиттер наземной станцией;
и) по полученному времени в сквиттере и времени приема сквиттера рассчитывают расстояние до воздушного судна;
к) по полученным в сквиттере координатам и собственным координатам наземной станции рассчитывают расстояние до воздушного судна, излучившего сквиттер;
л) формируют признак достоверности полученного сообщения, при этом:
на этапе б) дополнительно осуществляют вобуляцию импульсов тактовой последовательности, на этапе д) дополнительно записывают в сквиттер точное время, на этапе и) дополнительно рассчитывают расстояние до воздушного судна и на этапе л) дополнительно формируют признак достоверности сравнением расстояния, полученного на этапе и), с расстоянием, полученным на этапе к).
Согласно первому варианту устройство для контроля достоверности данных системы автоматического зависимого наблюдения включает в себя:
- бортовое оборудование, состоящее из генератора тактовой последовательности, счетчика вобуляции, формирователь сквиттеров, передающего устройства, генератора случайных чисел, датчика сообщений, при этом первый вход формирователя сквиттеров соединен с первым выходом счетчика вобуляции, второй вход счетчика вобуляции соединен с первым выходом генератора случайных чисел, входы 3…N формирователя сквиттеров соединены с выходами 1…(N-2) датчика сообщений и первый выход формирователя сквиттеров соединен с входом передающего устройства;
- наземное оборудование, принимающее сквиттер, состоящее из приемного устройства, дешифратора сквиттеров, формирователя признака достоверности, датчика времени ГНСС, при этом первый выход приемного устройства соединен с первым входом дешифратора сквиттеров, первый выход дешифратора сквиттеров соединен с первым входом формирователя признака достоверности,
при этом:
бортовое оборудование дополнительно имеет устройство записи времени ГНСС, а наземное оборудование дополнительно имеет измеритель дальности;
в бортовом оборудовании первый выход генератора тактовой последовательности соединен с первым входом счетчика вобуляции, второй вход формирователя сквиттеров соединен с первым выходом устройства записи времени ГНСС; и
в наземном оборудовании второй вход формирователя признака достоверности соединен с первым выходом измерителя дальности, первый вход измерителя дальности соединен с вторым выходом дешифратора сквиттеров, а второй вход измерителя дальности соединен с датчиком времени ГНСС.
Согласно изобретению, во втором варианте способ контроля достоверности данных системы автоматического зависимого наблюдения включает в себя этапы, на которых:
а) формируют тактовую последовательность, инициирующую процесс формирования сквиттеров;
б) выполняют генерацию случайных чисел, которую используют для установки счетчика вобуляции;
в) выполняют вобуляцию импульсов запуска передатчика;
г) формируют информационный сквиттер;
д) записывают в сквиттер время глобальной навигационной спутниковой системы (ГНСС);
ж) записывают в сквиттер начальную установку счетчика вобуляции;
з) передают сквиттер на землю;
и) декодируют сквиттер наземной станцией;
к) по полученным в сквиттере времени ГНСС и задержке счетчика вобуляции рассчитывают, с учетом времени приема сквиттера, расстояние до воздушного судна;
л) по полученным в сквиттере координатам и собственным координатам наземной станции рассчитывают расстояние до воздушного судна, излучившего сквиттер;
м) формируют признак достоверности полученного сообщения, отличающийся тем, что
на этапе д) дополнительно записывают в сквиттер точное время, на этапе ж) дополнительно записывают в сквиттер начальную установку счетчика вобуляции, на этапе к) дополнительно рассчитывают расстояние до воздушного судна и на этапе м) дополнительно формируют признак достоверности сравнением расстояния, полученного на этапе к), с расстоянием, полученным на этапе л).
Согласно первому варианту устройство для контроля достоверности данных системы автоматического зависимого наблюдения включает в себя:
бортовое оборудование, состоящее из генератора тактовой последовательности, формирователя сквиттеров, передающего устройства, датчика сообщений, счетчика вобуляции, генератора случайных чисел, при этом выход генератора тактовой последовательности соединен с первым входом формирователя сквиттеров, входы 5…(N+4) формирователя сквиттеров соединены с выходами 1…N датчика сообщений, первый выход формирователя сквиттеров соединен с первым входом передающего устройства, второй выход формирователя сквиттеров соединен с вторым входом счетчика вобуляции, первый вход счетчика вобуляции соединен с первым выходом генератора случайных чисел, первый выход генератора случайных чисел соединен с третьим входом формирователя сквиттеров;
наземное оборудование, принимающее излученный сквиттер, состоящее из приемного устройства, дешифратора сквиттеров, формирователя признака достоверности, датчика времени ГНСС, при этом информационный сквиттер принимается приемным устройством, первый выход которого соединен с первым входом дешифратора сквиттеров, а первый выход дешифратора сквиттеров соединен с первым входом формирователя признака достоверности,
при этом:
бортовое оборудование дополнительно имеет устройство записи времени ГНСС и устройство записи задержки, а наземное оборудование дополнительно имеет измеритель дальности;
в бортовом оборудовании второй вход формирователя сквиттеров соединен с первым выходом устройства записи времени ГНСС, а четвертый вход формирователя сквиттеров соединен с первым выходом устройства записи задержки, первый вход устройства записи задержки соединен с первым выходом генератора случайных чисел; и
в наземном оборудовании второй вход формирователя признака достоверности соединен с первым выходом измерителя дальности, первый вход измерителя дальности соединен с вторым выходом дешифратора сквиттеров, через который приходит информация о времени формирования сквиттера, третий вход измерителя дальности соединен с третьим выходом дешифратора сквиттеров, по которому приходит задержка выдачи сквиттера, а второй вход измерителя дальности соединен с датчиком времени ГНСС.
Предлагаемые способы и устройства контроля достоверности данных системы автоматического зависимого наблюдения обеспечивает передачу точного времени излучения информационных сквиттеров бортовым оборудованием АЗН-В 1090 ES, осуществляют вобуляцию импульсов тактовой последовательности, с помощью которых активируется формирование сквиттера (вариант 1) или записи в сквиттер времени задержки, которую осуществляет счетчик вобуляции (вариант 2), в результате чего автоматически происходит запись точного времени, не искаженного генератором вобуляции, или запись поправки к записанному времени, учитывающей задержку от счетчика вобуляции, в отличие от прототипов, где вобуляция искажает время излучения сквиттеров.
Краткое описание чертежей
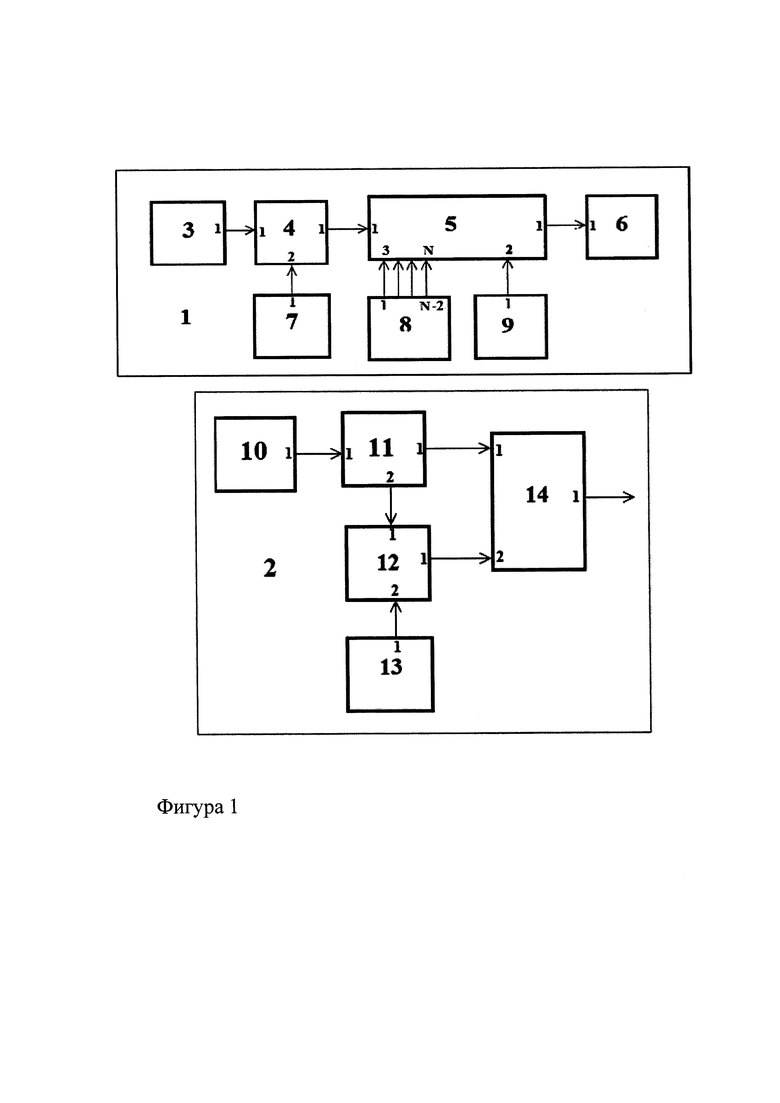
На фиг. 1 показана структурная схема устройства согласно первому варианту осуществления изобретения.
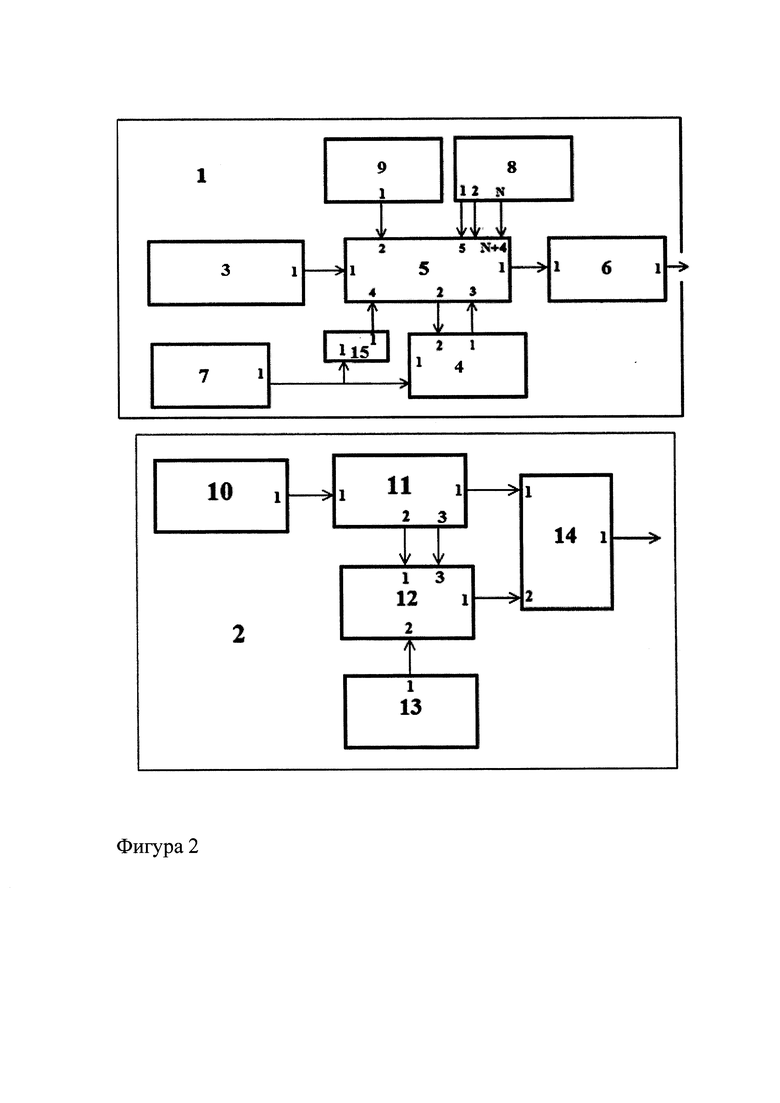
На фиг. 2 показана структурная схема устройства согласно второму варианту осуществления изобретения.
Осуществление изобретения
В первом варианте предлагаемое устройство контроля достоверности данных системы автоматического зависимого наблюдения обеспечивает передачу точного времени излучения информационных сквиттеров бортовым оборудованием АЗН-В 1090 ES. Устройство отличается наличием счетчика вобуляции тактовой последовательности формирователя сквиттеров и устройством записи в сквиттер точного времени. Устройство включает в себя бортовое оборудование, содержащее:
- генератор 3 тактовой последовательности;
- счетчик 4 вобуляции;
- формирователь 5 сквиттеров;
- передающее устройство 6;
- генератор 7 случайных чисел;
- датчик 8 сообщений;
- устройство 9 записи времени ГНСС.
Первый выход генератора 3 тактовой последовательности частотой 1 Гц соединяется с первым входом счетчика 4 вобуляции, второй вход которого соединен с первым выходом генератора 7 случайных чисел. Выход счетчика вобуляции соединен с первым входом формирователя 5 сквиттеров, второй вход которого соединен с первым выходом устройства 9 записи времени ГНСС, входы с третьего по вход N формирователя сквиттеров соединены с датчиками 8 сообщений, первый выход формирователя сквиттеров соединен с первым входом передающего устройства.
Наземное оборудование содержит:
- приемное устройство 10;
- дешифратор 11 сквиттеров;
- измеритель 12 дальности; -датчик 13 времени ГНСС;
- формирователь 14 признака достоверности.
Приемное устройство 10 передает принятый сигнал с первого выхода на первый вход дешифратора 11 сквиттеров, с первого выхода которого координаты, принятые в составе сквиттера, передаются на первый вход формирователя 14 признака достоверности. Со второго выхода дешифратора сквиттеров на первый вход измерителя 12 дальности поступает время излучения сквиттера, на его второй вход приходит время приема сквиттера, с первого выхода измерителя дальности измеренная дальность поступает на второй вход формирователя признака достоверности, с первого выхода которого получают признак достоверности.
Во втором варианте предлагаемое устройство контроля достоверности данных системы автоматического зависимого наблюдения обеспечивает передачу точного времени излучения информационных сквиттеров бортовым оборудованием АЗН-В 1090 ES. Устройство отличается наличием устройства записи задержки и устройства записи в сквиттер точного времени, и включает в себя бортовое оборудование, содержащее:
- устройство 9 записи времени ГНСС;
- датчик 8 сообщений;
- генератор 3 тактовой последовательности;
- формирователь 5 сквиттеров;
- передающее устройство 6;
- генератор 7 случайных чисел; -устройство 15 записи задержки
- счетчик 4 вобуляции.
Генератор 4 тактовой последовательности, с первого выхода которого тактовая последовательность поступает на первый вход формирователя 5 сквиттеров, на второй вход которого приходит точное время с первого выхода устройства записи точного времени, с выходов 1-N датчика 3 сообщений бортовая информация поступает в формирователь сквиттеров на входы 5-(N+4). На четвертый вход формирователя сквиттеров приходит время задержки излучения сквиттера с первого выхода устройства 15 записи задержки, на первый вход которого с первого выхода генератора 7 случайных чисел поступает начальная установка счетчика 4 вобуляции, с второго выхода формирователя сквиттеров на второй вход счетчика вобуляции поступает импульс начала формирования задержки, на третий вход формирователя сквиттеров с первого выхода счетчика вобуляции приходит импульс начала излучения сквиттера, с первого выхода формирователя сквиттеров сформированный сквиттер поступает в передающее устройство.
Наземное оборудование содержит:
- приемное устройство 10;
- дешифратор 11 сквиттеров;
- измеритель 12 дальности; -датчик 13 времени ГНСС;
- формирователь 14 признака достоверности.
Приемное устройство 10 передает принятый сигнал с первого выхода на первый вход дешифратора 11 сквиттеров, с первого выхода которого координаты, принятые в составе сквиттера, передаются на первый вход формирователя 14 признака достоверности, со второго выхода дешифратора сквиттеров на первый вход измерителя 12 дальности поступает время излучения сквиттера, с третьего выхода дешифратора сквиттеров на третий вход измерителя дальности поступает задержка излучения сквиттера; на его второй вход приходит время приема сквиттера с первого выхода датчика времени ГНСС, с первого выхода измерителя дальности измеренная дальность поступает на второй вход формирователя признака достоверности, с первого выхода которого получают признак достоверности.
Предлагаемый способ и устройство контроля достоверности данных системы автоматического зависимого наблюдения обеспечивает передачу точного времени излучения информационных сквиттеров бортовым оборудованием АЗН-В 1090 ES, осуществляет вобуляцию импульсов тактовой последовательности частотой 1 Гц, используя генератор случайных чисел, в результате чего автоматически происходит вобуляция излучаемых сообщений, в которых записанное точное время не искажается генератором вобуляции, который в прототипах вобулирует запуск передатчика. Наземная станция АЗН-В 1090 ES, получив сквиттер, извлекает из него время, когда был сформирован сквиттер, это время привязано к глобальной навигационной спутниковой системе (ГНСС), что позволяет определить точное время излучения сквиттера. Поскольку время приема сквиттера наземной станцией известно, она может определить дальность до воздушного судна, что позволяет произвести селекцию spufing сквиттера.
Предлагаемые способ и устройство контроля достоверности данных системы автоматического зависимого наблюдения обеспечивает передачу точного времени излучения информационных сквиттеров бортовым оборудованием АЗН-В 1090 ES. Устройство при формировании сквиттера использует тактовую последовательность частотой 1 Гц для начала формирования сквиттеров, данные генератора случайных чисел, обеспечивающего вобуляцию излучаемых сообщений. Устройство записывает в информационный сквиттер число, характеризующее задержку излучения, полученное от генератора случайных чисел. Наземная станция АЗН-В 1090 ES, получив сквиттер, извлекает из него время, когда был сформирован сквиттер, привязанное к ГНСС, и число установки счетчика вобуляции, что позволяет определить точное время излучения сквиттера. Поскольку время приема сквиттера наземной станцией известно, она может определить дальность до воздушного судна, что позволяет произвести селекцию spufing сквиттера.
Ниже приводится описание работы оборудования, реализующего первый способ контроля достоверности данных системы автоматического зависимого наблюдения.
В бортовой части оборудования АЗН-В 1090 ES для осуществления контроля достоверности данных системы автоматического зависимого наблюдения осуществляют вобуляцию тактовой последовательности, инициирующей процесс формирования сквиттеров. Сформированная в блоке 3 тактовая последовательность, осуществляющая запуск формирования информационных сквиттеров, с первого выхода блока 3 поступает на 1 вход счетчика 4 вобуляции. В счетчике вобуляции осуществляется задержка каждого импульса тактовой последовательности на случайную величину, которая определяется генератором 7 случайных чисел, с первого выхода которого на вход 2 блока 4 поступают случайные числа, которые осуществляют начальную установку счетчика вобуляции. С первого выхода счетчика вобуляции новая тактовая последовательность поступает на первый вход формирователя сквиттеров, на 2 вход которого поступает информация с приемника ГНСС, а на входы 3, 5…N+4 поступает информация с датчиков сообщений. С приходом импульса тактовой последовательности происходит формирование сквиттера и выдача его с выхода 1 на вход 1 передающего устройства. При записи времени в сквиттер учитывается постоянная задержки от момента записи времени в сквиттер до излучения сквиттера. Излученный сквиттер принимается приемным устройством 10 системы 2 автоматического зависимого наблюдения АЗН-В 1090 ES. С выхода 1 приемного устройства принятый сигнал поступает на первый вход дешифратора 11 сквиттеров, с первого выхода которого декодированный сигнал поступает на первый вход формирователя признака достоверности, а с второго выхода декодированный сигнал поступает на первый вход измерителя дальности, на второй вход которого приходит информация от датчика 13 времени ГНСС.Измеритель дальности по полученному в сквиттере времени излучения сигнала и времени приема этого сигнала, определенного с помощью данных, полученных от датчика времени ГНСС, рассчитывает дальность до источника сигнала. С первого выхода измерителя дальности рассчитанная дальность поступает на второй вход формирователя 14 признака достоверности, который сравнивает рассчитанную дальность с дальностью, определенной по координатам, извлеченным из сквиттера, и собственным координатам. Если дальность, рассчитанная по времени прохождения сигнала, отличается от дальности, рассчитанной по принятым координатам, на величину, превышающую установленный порог, формируется признак недостоверности принятого сигнала.
Ниже приводится описание работы оборудования, реализующего второй способ контроля достоверности данных системы автоматического зависимого наблюдения.
В бортовой части оборудования АЗН-В 1090 ES для осуществления контроля достоверности данных системы автоматического зависимого наблюдения осуществляют запись в сквиттер начальной установки счетчика вобуляции, от которой зависит время задержки излучения сквиттера. На первый вход формирователя 6 сквиттеров с первого выхода генератора 3 тактовой последовательности поступает тактовая последовательность, запускающая процесс формирования информационных сквиттеров. На второй вход формирователя информационных сквиттеров поступает информация с первого выхода устройства 9 записи времени ГНСС, на входы 5…N поступают данные от датчика 3 сообщений, а на третий вход поступает импульс запуска передачи сквиттера. С второго выхода формирователя информационных сквиттеров на второй вход счетчика вобуляции приходит импульс, запускающий работу счетчика вобуляции, на первый вход которого подается начальная установка с первого выхода генератора 7 случайных чисел. На четвертый вход формирователя сквиттеров поступает от датчика 7 случайных чисел число, характеризующее задержку излучения сквиттера, которая записывается в сквиттер для передачи на наземную станцию. С первого выхода блока 5 сформированный сквиттер поступает на первый вход передающего устройства 7 6, которое излучает сквиттер. В наземной станции излученный сквиттер принимается приемным устройством 10, с первого выхода которого принятый сквиттер поступает на первый вход дешифратора 11 сквиттеров, с первого выхода которого декодированная координата поступает на первый вход формирователя признака достоверности. С второго выхода дешифратора сквиттеров на измеритель дальности передаются полученные из сквиттера время и задержка излучения сквиттера, на второй вход измерителя дальности поступают данные с датчика ГНСС. По разнице времени излучения сквиттера, вычисленной по принятым в сквиттере времени и задержке излучения сквиттера, и собственному времени приема сквиттера измеритель 12 дальности рассчитывает дальность до воздушного судна, излучившего сквиттер, которая с первого выхода блока 12 поступает на второй вход формирователя 14 признака достоверности. Формирователь достоверности по дальности, полученной от измерителя дальности, координатам, принятым из сквиттера, и собственным координатам определяет, насколько дальность, измеренная по времени распространения сигнала, отличается от дальности, рассчитанной по координатам, если разница превышает установленный порог, тогда блок 14 формирует признак недостоверности принятого сообщения.
Литература
1. Сосновский А.А. и др. Авиационная радионавигация, справочник. - М.: Транспорт, 1990.
2. Автоматизированные системы управления воздушным движением: Новые информационные технологии в авиации: Учебное пособие / P.M. Ахмедов, А.А. Бибутов, А.В. Васильев и др.; под ред. С.Г. Пятко и А.И. Красова. СПб.: Политехника, 2004.
3. A. Costin and A. Francillon. "Ghost in the Air (Traffic): On insecurity of ADS-B protocol and practical attacks on ADS-B devices," conf. Black Hat USA, 2012.
4. Strohmeier M., Lenders V., Martinovic I., On the Security of the Automatic Dependent Surveillance-Broadcast Protocol // IEEE Communication Surveys & Tutorials. 2015, T. 17, N2, p. 1066-1087.
5. патент РФ №2542746, «Способ непрерывного контроля целостности воздушных судов на всех участках полета» В.В. Бейнарович, В.А. Морковкин, А.Г. Нечаенко, В.А. Обуховец, В.В. Воронин
6. патент РФ №2333538, «Способ индикации положения объектов наблюдения» С.Г. Пятко, Э.Я. Фальков, А.И. Красов, С.Ф. Скобеев, И.М. Танюхин.
7. патент РФ №2667494, «Способ контроля достоверности данных системы автоматического зависимого наблюдения». С.В. Бабуров, Т.Б. Гальперин, О.И. Саута, А.И. Соколов, Ю.С. Юрченко.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ ХАРАКТЕРИСТИК ЗОНЫ НАЧАЛЬНОГО ПОИСКА СВЯЗНЫХ КОСМИЧЕСКИХ АППАРАТОВ | 2003 |
|
RU2242790C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2003 |
|
RU2263401C2 |
| СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2023 |
|
RU2809110C1 |
| Способ и устройство для контроля целостности измерений бортовой аппаратуры глобальной навигационной спутниковой системы (ГНСС) с применением измерений радиосистемы ближней навигации и псевдоспутников | 2021 |
|
RU2778093C1 |
| ДАЛЬНОМЕРНАЯ РАДИОТЕХНИЧЕСКАЯ СИСТЕМА БЛИЖНЕЙ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2011 |
|
RU2478979C1 |
| Многопозиционная система посадки летательных аппаратов | 2019 |
|
RU2717284C2 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ТРАССЫ И КООРДИНАТ ДЕФЕКТОВ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2004 |
|
RU2261424C1 |
| СПОСОБ НЕПРЕРЫВНОГО КОНТРОЛЯ ЦЕЛОСТНОСТИ ВОЗДУШНЫХ СУДОВ НА ВСЕХ УЧАСТКАХ ПОЛЕТА | 2013 |
|
RU2542746C2 |
| МАГНИТОСТРИКЦИОННЫЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1994 |
|
RU2090839C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1993 |
|
RU2037842C1 |
Изобретение относится к средствам контроля достоверности данных системы автоматического зависимого наблюдения. Технический результат изобретения заключается в повышении безопасности полетов за счет увеличения защищенности к ложным сигналам. Осуществляют вобуляцию импульсов тактовой последовательности, с помощью которых активируется формирование сквиттера или записи в сквиттер времени задержки, которую осуществляет счетчик вобуляции, в результате чего автоматически происходит запись точного времени, не искаженного генератором вобуляции, который в прототипах вобулирует запуск передатчика. 4 н.п. ф-лы, 2 ил.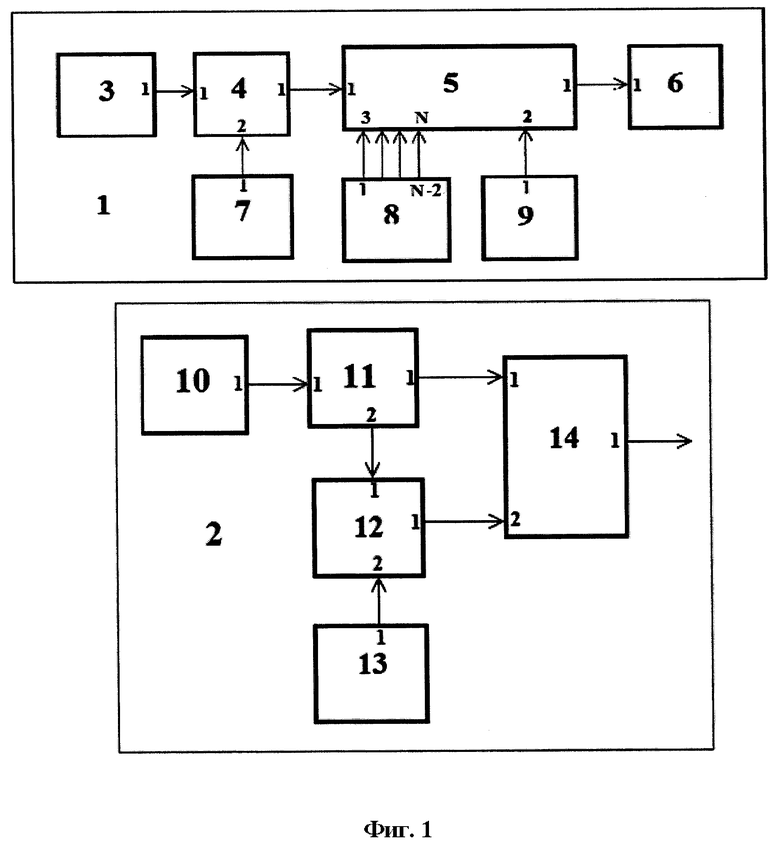
1. Способ контроля достоверности данных системы автоматического зависимого наблюдения, в котором:
а) формируют тактовую последовательность, инициирующую процесс формирования сквиттеров;
б) выполняют генерацию случайных чисел, которую используют для установки счетчика вобуляции;
в) выполняют вобуляцию импульсов тактовой последовательности, инициирующей процесс формирования сквиттеров;
г) формируют информационный сквиттер;
д) записывают в сквиттер время глобальной навигационной спутниковой системы (ГНСС);
ж) передают сквиттер на землю;
з) декодируют сквиттер наземной станцией;
и) по полученному времени в сквиттере и времени приема сквиттера рассчитывают расстояние до воздушного судна;
к) по полученным в сквиттере координатам и собственным координатам наземной станции рассчитывают расстояние до воздушного судна, излучившего сквиттер;
л) формируют признак достоверности полученного сообщения,
отличающийся тем, что
на этапе б) дополнительно осуществляют вобуляцию импульсов тактовой последовательности, на этапе д) дополнительно записывают в сквиттер точное время, на этапе и) дополнительно рассчитывают расстояние до воздушного судна и на этапе л) дополнительно формируют признак достоверности сравнением расстояния, полученного на этапе и), с расстоянием, полученным на этапе к).
2. Устройство для контроля достоверности данных системы автоматического зависимого наблюдения, включающее в себя:
- бортовое оборудование (1), состоящее из генератора (3) тактовой последовательности, счетчика (4) вобуляции, формирователя (5) сквиттеров, передающего устройства (6), генератора (7) случайных чисел, датчика (8) сообщений, при этом первый вход формирователя (5) сквиттеров соединен с первым выходом счетчика (4) вобуляции, второй вход счетчика (4) вобуляции соединен с первым выходом генератора (7) случайных чисел, входы 3…N формирователя (5) сквиттеров соединены с выходами 1…(N-2) датчика (8) сообщений и первый выход формирователя (5) сквиттеров соединен с входом передающего устройства (6);
- наземное оборудование (2), принимающее сквиттер, состоящее из приемного устройства (10), дешифратора (11) сквиттеров, формирователя (14) признака достоверности, датчика (13) времени ГНСС, при этом первый выход приемного устройства (10) соединен с первым входом дешифратора (11) сквиттеров, первый выход дешифратора (11) сквиттеров соединен с первым входом формирователя (14) признака достоверности,
отличающееся тем, что
бортовое оборудование (1) дополнительно имеет устройство (9) записи времени ГНСС, а наземное оборудование (2) дополнительно имеет измеритель (12) дальности;
в бортовом оборудовании (1) первый выход генератора (3) тактовой последовательности соединен с первым входом счетчика (4) вобуляции, второй вход формирователя (5) сквиттеров соединен с первым выходом устройства (9) записи времени ГНСС; и
в наземном оборудовании (2) второй вход формирователя (14) признака достоверности соединен с первым выходом измерителя (12) дальности, первый вход измерителя (12) дальности соединен с вторым выходом дешифратора (11) сквиттеров, а второй вход измерителя (12) дальности соединен с датчиком (13) времени ГНСС.
3. Способ контроля достоверности данных системы автоматического зависимого наблюдения, в котором:
а) формируют тактовую последовательность, инициирующую процесс формирования сквиттеров;
б) выполняют генерацию случайных чисел, которую используют для установки счетчика вобуляции;
в) выполняют вобуляцию импульсов запуска передатчика;
г) формируют информационный сквиттер;
д) записывают в сквиттер время глобальной навигационной спутниковой системы (ГНСС);
ж) записывают в сквиттер начальную установку счетчика вобуляции;
з) передают сквиттер на землю;
и) декодируют сквиттер наземной станцией;
к) по полученным в сквиттере времени ГНСС и задержке счетчика вобуляции рассчитывают, с учетом времени приема сквиттера, расстояние до воздушного судна;
л) по полученным в сквиттере координатам и собственным координатам наземной станции рассчитывают расстояние до воздушного судна, излучившего сквиттер;
м) формируют признак достоверности полученного сообщения, отличающийся тем, что
на этапе д) дополнительно записывают в сквиттер точное время, на этапе ж) дополнительно записывают в сквиттер начальную установку счетчика вобуляции, на этапе к) дополнительно рассчитывают расстояние до воздушного судна и на этапе м) дополнительно формируют признак достоверности сравнением расстояния, полученного на этапе к), с расстоянием, полученным на этапе л).
4. Устройство для контроля достоверности данных системы автоматического зависимого наблюдения, включающее в себя:
- бортовое оборудование (1), состоящее из генератора (3) тактовой последовательности, формирователя (5) сквиттеров, передающего устройства (6), датчика (8) сообщений, счетчика (4) вобуляции, генератора (7) случайных чисел, при этом выход генератора (3) тактовой последовательности соединен с первым входом формирователя (5) сквиттеров, входы 5…(N+4) формирователя (5) сквиттеров соединены с выходами 1…N датчика (8) сообщений, первый выход формирователя (5) сквиттеров соединен с первым входом передающего устройства (6), второй выход формирователя (5) сквиттеров соединен с вторым входом счетчика (4) вобуляции, первый вход счетчика (4) вобуляции соединен с первым выходом генератора (7) случайных чисел, первый выход генератора (7) случайных чисел соединен с третьим входом формирователя (5) сквиттеров;
- наземное оборудование (2), принимающее излученный сквиттер, состоящее из приемного устройства (10), дешифратора (11) сквиттеров, формирователя (14) признака достоверности, датчика (13) времени ГНСС, при этом информационный сквиттер принимается приемным устройством (10), первый выход которого соединен с первым входом дешифратора (11) сквиттеров, а первый выход дешифратора (11) сквиттеров соединен с первым входом формирователя (14) признака достоверности,
отличающееся тем, что
бортовое оборудование (1) дополнительно имеет устройство (9) записи времени ГНСС и устройство (15) записи задержки, а наземное оборудование (2) дополнительно имеет измеритель (12) дальности;
в бортовом оборудовании (1) второй вход формирователя (5) сквиттеров соединен с первым выходом устройства (9) записи времени ГНСС, а четвертый вход формирователя (5) сквиттеров соединен с первым выходом устройства (15) записи задержки, первый вход устройства (15) записи задержки соединен с первым выходом генератора (7) случайных чисел; и
в наземном оборудовании (2) второй вход формирователя (14) признака достоверности соединен с первым выходом измерителя (12) дальности, первый вход измерителя (12) дальности соединен с вторым выходом дешифратора (11) сквиттеров, через который приходит информация о времени формирования сквиттера, третий вход измерителя (12) дальности соединен с третьим выходом дешифратора (11) сквиттеров, по которому приходит задержка выдачи сквиттера, а второй вход измерителя (12) дальности соединен с датчиком (13) времени ГНСС.
| СПОСОБ КОНТРОЛЯ ДОСТОВЕРНОСТИ ДАННЫХ СИСТЕМЫ АВТОМАТИЧЕСКОГО ЗАВИСИМОГО НАБЛЮДЕНИЯ | 2017 |
|
RU2667494C1 |
| СПОСОБ ИНДИКАЦИИ ПОЛОЖЕНИЯ ОБЪЕКТОВ НАБЛЮДЕНИЯ | 2006 |
|
RU2333538C2 |
| СПОСОБ НЕПРЕРЫВНОГО КОНТРОЛЯ ЦЕЛОСТНОСТИ ВОЗДУШНЫХ СУДОВ НА ВСЕХ УЧАСТКАХ ПОЛЕТА | 2013 |
|
RU2542746C2 |
| US 20110140950 A1, 16.06.2011. | |||

