Область техники, к которой относится изобретение
Изобретение относится к спутниковой навигации и управлению воздушным движением и может применяться для контроля целостности координатной информации глобальной навигационной спутниковой системы (ГНСС), используемой в системе управления воздушным движением (УВД). Под контролем целостности координатной информации ГНСС понимается способность гарантировать своевременное предупреждение системы УВД, с заданными уровнями вероятностей пропуска некачественной информации и ложного предупреждения, о тех моментах времени, когда полученная этой системой информация ГНСС о координатах воздушного судна не должна использоваться при предоставлении услуг УВД. Увеличивающаяся актуальность оперативного контроля целостности информации ГНСС в целях наблюдения и УВД связана с появлением систем автоматического зависимого наблюдения, особенно вещательного типа, и возможностью использования этих систем для передачи информации ГНСС с борта ВС в систему УВД с последующей обработкой и отображением на индикаторе воздушной обстановки.
Уровень техники
Из существующего уровня техники известен способ контроля целостности навигационного поля ГНСС, при котором качество навигационного поля контролируется специальной аппаратурой, входящей в состав наземной подсистемы контроля и управления, - аппаратурой контроля поля [1, с.338]. После обнаружения нарушения в функционировании бортовой аппаратуры некоторого космического аппарата (КА) ГНСС аппаратура контроля обеспечивает формирование признака неисправности этого КА и передачу признака в альманах всех КА ГНСС.
Основным недостатком этого способа является низкая оперативность оповещения потребителей при обнаружении нарушения функционирования КА ГНСС (до 16 часов), что препятствует получению технического результата, который обеспечивается заявляемым изобретением.
Известен способ, при котором контроль целостности осуществляется на низкоорбитальном КА, на котором устанавливается навигационная аппаратура потребителя. При этом в процессе орбитального полета непрерывно осуществляется прием навигационных сообщений видимых КА ГНСС, выполняются навигационные определения, используется часть принятых навигационных сообщений и получаются несколько наборов координат потребителей. Путем обработки избыточной навигационной информации анализируется качество навигационных сигналов всех видимых КА ГНСС. При обнаружении нарушения функционирования некоторого КА ГНСС оперативно формируется и передается признак неисправности, который принимается в бортовых комплексах управления КА ГНСС и вносится в альманах системы (RU 2477835 C1, опубл. 17.10.2011).
Недостатками способа являются:
- оценка качества навигационных сигналов всех видимых КА ГНСС только за счет избыточности навигационной информации;
- необходимость выведения на орбиту низкоорбитального КА с аппаратными средствами, включающими навигационную аппаратуру потребителя;
- отсутствие канала оперативной передачи в систему УВД признака выявленной неисправности функционирования бортовой аппаратуры КА ГНСС, что также препятствует получению технического результата, который обеспечивается заявляемым изобретением.
Наиболее близким к заявленному изобретению является способ-прототип контроля целостности навигационного поля ГНСС, при котором качество навигационного поля гарантируется наземной контрольно-корректирующей станцией (ККС), имеющей в составе опорные измерительные станции с известными координатами и передающие средства [1, с.355-359]. При этом на опорных измерительных станциях принимаются навигационные сообщения видимых КА ГНСС. На ККС рассчитывают и передают потребителям (воздушным судам) дифференциальные поправки для корректной обработки навигационных сообщений при навигационных определениях, а также передают предупреждающую информацию диспетчеру УВД.
Существенным достоинством способа-прототипа является возможность оперативного выявления КА ГНСС, передающего некорректные навигационные сообщения, которые не должны использоваться для навигационных определений, а также выявление больших погрешностей, вызванных средой распространения спутникового сигнала. Однако способ-прототип имеет и существенные недостатки, которые препятствуют получению технического результата, который обеспечивается заявляемым изобретением:
1. возможность пропуска некорректной координатной информации или прекращение использования в навигационных определениях на борту ВС информации от исправных спутников вследствие того, что ККС и ВС находятся в разных географических точках;
2. потребность в значительном ресурсе на создание и эксплуатацию ККС.
Раскрытие изобретения
Задачей изобретения является исключение случаев использования в целях наблюдения и обслуживания воздушного движения некорректной координатной информации спутниковых навигационных систем ГЛОНАСС/GPS.
Данная задача решается за счет того, что заявленный способ контроля целостности координатной информации, определяемой на борту ВС на основе ГНСС и передаваемой затем в систему управления воздушным движением (УВД) по каналам автоматического зависимого наблюдения вещательного типа (АЗН-В), осуществляется в средствах автоматизации УВД путем сравнения расстояния между оценками положения воздушного судна, полученными от ГНСС по каналам АЗН-В и от независимого опорного источника наблюдения с предварительно выбранным пороговым значением этого расстояния, обеспечивающим заданные значения вероятностей пропуска ошибочной информации и ложного предупреждения, и в случае превышения указанного порога предупреждения диспетчера и устранения информации ГНСС с индикатора воздушной обстановки диспетчера УВД. В качестве опорного источника наблюдения может использоваться, например, радиолокатор.
Принципиальным моментом предлагаемого способа является определение порогового значения расстояния между оценками положения воздушного судна, полученными по данным АЗН-В (ГНСС) и независимого источника наблюдения, выбор которого (порогового значения) обеспечивает заданные уровни вероятностей пропуска некачественной навигационной информации и ложного предупреждения о появлении такой информации. Пороговое значение (Dt) определяется решением системы неравенств:
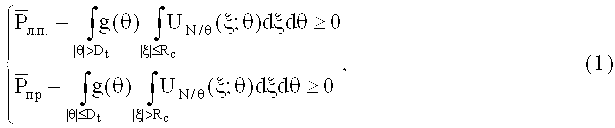
где:
ξ=ξ(x1,y1) - точка на плоскости отображения координат воздушного судна (x1,y1), получаемых по данным АЗН-В;
θ=θ(sx,sy) - точка на плоскости относительных координат ВС, полученных по данным АЗН-В (ГНСС) и опорного источника наблюдения: sx=х1-х2; sy=y1-y2;
g(θ) - плотность распределения наблюдаемого расстояния между оценками положения воздушного судна, полученными по данным АЗН-В (ГНСС) и опорного источника наблюдения, определяемая по результатам анализа наблюдаемых расстояний в районе применения способа;
Rc=1853 метра - радиус удержания.
Существенные признаки, характеризующие изобретение:
1. Реализация заявленного способа в средствах автоматизации УВД, что обеспечивает оперативность перехода на опорный источник наблюдения в случае получения от АЗН-В (ГНСС) некорректной координатной информации.
2. Использование в качестве контрольного средства альтернативного ГНСС опорного источника наблюдения, например РЛС.
3. Проведение навигационных измерений с использованием ГНСС непосредственно на борту ВС, то есть в конкретных условиях полета данного ВС, что выгодно отличает заявленный способ от изобретения-прототипа и повышает достоверность контроля целостности.
4. Выявление любых ошибок в контуре получения и передачи навигационной информации, в том числе, не связанных с функционированием ГНСС.
5. Обеспечение контроля целостности на заданных уровнях вероятностей пропуска навигационных ошибок и ложных предупреждений.
6. Выполнение следующей совокупности последовательных действий для контроля целостности координат ВС, получаемых на основе информации ГНСС:
- определение порогового значения расстояния между оценками положения воздушного судна, полученными по данным АЗН-В (ГНСС) и независимого источника наблюдения с использованием соотношений (1);
- получение от воздушных судов по каналам АЗН-В координатной информации, определенной на борту ВС по данным ГНСС;
- прогноз в средствах автоматизации УВД, на момент получения последней координатной информации от опорного источника наблюдения, принятых с ВС координат и определение расстояния между оценками местоположения воздушного судна, полученными по данным ГНСС (от системы АЗН-В) и от опорного источника наблюдения;
- сравнение этого расстояния с его пороговым значением, обеспечивающим заданные значения вероятностей пропуска ошибочной навигационной информации и ложного предупреждения о появлении такой информации;
- устранение информации ГНСС с индикатора воздушной обстановки диспетчера УВД в случае превышения указанного порога.
Литература
1. ГЛОНАСС. Принципы построения и функционирования / Под ред. А.И. Петрова, В.Н. Харисова. - М.: Радиотехника, 2005.
2. Введение в теорию вероятностей и ее приложения. В. Феллер. - М.: Мир, 1984.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НЕПРЕРЫВНОГО КОНТРОЛЯ ЦЕЛОСТНОСТИ ВОЗДУШНЫХ СУДОВ НА ВСЕХ УЧАСТКАХ ПОЛЕТА | 2013 |
|
RU2542746C2 |
| ЛЕТНО-МОДЕЛИРУЮЩИЙ ПИЛОТАЖНЫЙ КОМПЛЕКС | 2006 |
|
RU2310909C1 |
| Сеть беспроводной связи для аэродромной многопозиционной системы наблюдения | 2023 |
|
RU2820676C1 |
| СПОСОБ КОНТРОЛЯ ЦЕЛОСТНОСТИ НАВИГАЦИОННОГО ПОЛЯ ГЛОБАЛЬНОЙ НАВИГАЦИОННОЙ СПУТНИКОВОЙ СИСТЕМЫ | 2011 |
|
RU2477835C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ДОСТОВЕРНОСТИ ДАННЫХ СИСТЕМЫ АВТОМАТИЧЕСКОГО ЗАВИСИМОГО НАБЛЮДЕНИЯ (ВАРИАНТЫ) | 2024 |
|
RU2830184C1 |
| СПОСОБ ИНДИКАЦИИ ПОЛОЖЕНИЯ ОБЪЕКТОВ НАБЛЮДЕНИЯ | 2006 |
|
RU2333538C2 |
| Способ и устройство для контроля целостности измерений бортовой аппаратуры глобальной навигационной спутниковой системы (ГНСС) с применением измерений радиосистемы ближней навигации и псевдоспутников | 2021 |
|
RU2778093C1 |
| Способ контроля и повышения целостности измерений авиационных бортовых спутниковых навигационных приемников с применением метода курсовоздушного счисления координат | 2022 |
|
RU2804931C1 |
| ПОЛИЭРГАТИЧЕСКИЙ ТРЕНАЖЕРНЫЙ КОМПЛЕКС ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2013 |
|
RU2524508C1 |
| Система мониторинга координат спускаемых космических объектов или их аппаратов в атмосфере Земли и их диспетчерского контроля | 2017 |
|
RU2659376C1 |
Изобретение относится к спутниковой навигации и управлению воздушным движением (УВД). Технический результат - расширение функциональных возможностей. Для этого координаты воздушного судна (ВС), определяемые на борту ВС с использованием спутниковой навигационной системы и передаваемые по цифровому каналу вещательного автоматического зависимого наблюдения (АЗН-В) в систему управления воздушным движением для обработки и отображения диспетчеру УВД, сравниваются с координатами этого же ВС, измеренными с помощью опорного источника координатной информации, например радиолокационной станции (РЛС). При превышении заранее определенного порога в расстоянии между местоположениями ВС, оцененными на основе измерений спутниковой навигационной системы и опорного источника наблюдения, принимается решение о нарушении целостности в контуре обработки и передачи спутниковой навигационной информации, которая автоматически оперативно устраняется с индикатора воздушной обстановки диспетчера, осуществляющего УВД. При этом обеспечиваются заданные вероятности пропуска некачественной навигационной информации и ложного предупреждения о появлении такой информации.
Способ контроля целостности координатной информации, определяемой на борту ВС на основе ГНСС и передаваемой затем в систему управления воздушным движением (УВД) по каналам автоматического зависимого наблюдения вещательного типа (АЗН-В), осуществляемый в средствах автоматизации УВД путем сравнения расстояния между оценками положения воздушного судна, полученными от ГНСС посредством АЗН-В и от независимого опорного источника наблюдения с предварительно выбранным пороговым значением этого расстояния, обеспечивающим заданные значения вероятностей пропуска ошибочной информации и ложного предупреждения, и в случае превышения указанного порога предупреждения диспетчера и устранения информации ГНСС с индикатора воздушной обстановки диспетчера УВД, в качестве опорного источника наблюдения может использоваться, например, радиолокатор.
| ГЛОНАСС | |||
| Принципы построения и функционирования./Под ред | |||
| А.И | |||
| ПЕТРОВА, В.Н | |||
| ХАРИСОВА | |||
| - М: Радиотехника, 2005, c.355-359 | |||
| СПОСОБ ЭФЕМЕРИДНОГО ОБЕСПЕЧЕНИЯ ПРОЦЕССА УПРАВЛЕНИЯ КОСМИЧЕСКИМИ АППАРАТАМИ ГЛОБАЛЬНОЙ НАВИГАЦИОННОЙ СПУТНИКОВОЙ СИСТЕМЫ | 2009 |
|
RU2390730C1 |
| RU 2008126993 А, 10.01.2010 | |||
| Бортовые устройства спутниковой радионавигации / Под ред | |||
| В.С.ШЕБШАЕВИЧА | |||
| - М.: Радио и связь, 1988, с.200 | |||
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ЦЕЛОСТНОСТИ СПУТНИКОВОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2008 |
|
RU2411533C1 |

