Предлагаемое изобретение относится к измерительной технике, а именно к устройствам для определения линейных и угловых координат объекта, свободно перемещаемого в пространстве с шестью степенями свободы. Изобретение может найти применение в человеко-машинных интерфейсах, в качестве устройства жестикуляционного ввода, в частности в робототехнике для интуитивного ручного управления роботами-манипуляторами (робот-хирург, робот-сапер), в технологиях дополненной и виртуальной реальности. Кроме того, устройство позволяет осуществлять контроль положения различных механизмов и элементов технологического оборудования, находящихся в средах с высокой степенью загрязнения.
Известно устройство по способу определения местоположения на плоскости объекта, обладающего магнитным моментом по авт.св. СССР №1372261, G01R 33/02, с помощью которого измеряют в трех точках вертикальную к плоскости составляющую индукции магнитного поля измерителями, расположенными на осях лежащей в плоскости декартовой системы координат с дополнительным измерением вертикальной к плоскости составляющей индукции магнитного поля Земли. Для получения более точных координат сигнал с измеренной составляющей индукции магнитного поля Земли вычитают из сигналов, измеренных в трех точках.
К недостаткам известного устройства можно отнести возможность определения положения объекта только в декартовой системе координат на плоскости и только при условии его нахождения в одной плоскости с измерителями. Определение углового положения объекта при этом не осуществляется. Кроме того, устройство содержит распределенную на плоскости систему из четырех измерителей, что усложняет его конструкцию, ведет к увеличению его размеров и массы.
Известен способ определения координат источника магнитного поля по патенту РФ №2452652, G01R 33/02, решающий задачу определения координат объекта в пространстве путем перемещения носителя датчика относительно объекта и измерения модуля вектора магнитной индукции объекта. К недостаткам известного способа можно отнести необходимость производить носителем четыре измерения в разных точках пространства с известными координатами. Следовательно, требуется некоторыми известными способами перемещать носитель и определять его координаты в каждой точке измерения. При этом обязательным условием является неподвижность объекта в процессе измерений и перемещений носителя. Таким образом, известный способ имеет крайне низкое быстродействие и крайне высокую сложность реализации. Кроме того, известный способ не позволяет определять угловое положение объекта.
В качестве прототипа заявляемому устройству выбрано техническое решение по патенту РФ №2171476, G01R 33/02 (варианты). Устройство для определения положения объекта по первому варианту включает одну катушку индуктивности, взаимодействующую с генератором переменных напряжений, три трехкомпонентных (трехосевых) магниточувствительных датчика (магнитометра) и систему преобразователей и усилителей для передачи сигналов с магниточувствительных датчиков на вычислительный блок.
Устройство по второму варианту включает две катушки индуктивности, расположенные взаимно перпендикулярно на объекте и взаимодействующие с генераторами переменных напряжений, три трехкомпонентных магниточувствительных датчика и систему преобразователей и усилителей для передачи сигналов с магниточувствительных датчиков на вычислительный блок.
К недостаткам прототипа по первому варианту можно отнести невозможность определения одной из трех угловых координат объекта.
К недостаткам прототипа по второму варианту можно отнести необходимость применения дополнительной, перпендикулярной к первой, катушки индуктивности для задачи определения трех линейных и трех угловых координат объекта. Это дополнительно усложняет конструкцию, увеличивает энергопотребление, размеры и массу позиционируемой части устройства.
Общим недостатком устройства (по двум вариантам) является размещение катушек индуктивности на объекте, что ведет к значительному увеличению энергопотребления, размеров и массы позиционируемой части устройства. Кроме того, устройство требует наличия трех трехкомпонентных магниточувствительных датчиков, расположенных в вершинах треугольника, что ведет к усложнению конструкции и увеличению размеров стационарной части устройства.
Задача заявителя - создание простого по конструкции, удобного в эксплуатации устройства для определения линейных и угловых координат объекта, совершающего произвольные перемещения в определенной ограниченной области трехмерного пространства.
Технический результат заключается в быстром получении компактным экономичным устройством точных координат произвольно перемещающегося объекта.
Технический результат достигается тем, что в устройстве для определения положения объекта в пространстве, содержащем катушку индуктивности, трехосевой магнитометр, взаимодействующий с вычислительным блоком, согласно предлагаемому изобретению катушка индуктивности расположена неподвижно и взаимодействует со стабилизатором тока, который управляется сигналом с вычислительного блока. Также устройство содержит расположенные на объекте цифровые трехосевые акселерометр и магнитометр, выходы которых подключены непосредственно к вычислительному блоку. Вычислительный блок содержит: 1. блок разделения измеренного вектора магнитной индукции на вектор индукции магнитного поля Земли и вектор индукции магнитного поля катушки индуктивности; 2. блок вычисления угловых координат; 3. блок коррекции направления вектора индукции магнитного поля катушки индуктивности; 4. блок вычисления линейных координат. При этом выход магнитометра подключен ко входу блока разделения измеренного вектора магнитной индукции, первый выход которого подключен к первому входу блока вычисления угловых координат, а второй выход подключен к первому входу блока коррекции направления вектора индукции магнитного поля катушки индуктивности, выход которого подключен ко входу блока вычисления линейных координат, выход акселерометра подключен ко второму входу блока вычисления угловых координат, выход которого подключен ко второму входу блока коррекции направления вектора индукции магнитного поля катушки индуктивности.
Использование цифровых трехосевых магнитометра и акселерометра позволяет напрямую, минуя усилительно-преобразовательные блоки, передавать данные об измеренной индукции магнитного поля в данной точке пространства на вычислительный блок, реализующий алгоритм определения ориентации и положения объекта.
Благодаря технологии МЭМС (микроэлектромеханические системы), размеры датчиков составляют около 4×4×2 мм и менее. Платформа с цифровыми трехосевыми магнитометром и акселерометром является позиционируемой частью устройства и помещается на объект. Размеры платформы могут составлять около 20×20×5 мм и менее.
Используя единственный трехосевой магнитометр и единственный трехосевой акселерометр, совмещенные на одной платформе, вычислительный блок реализует алгоритм определения координат объекта исходя из информации о величине вектора искусственного магнитного поля в данной точке пространства совместно с алгоритмом определения ориентации объекта.
Использование миниатюрной платформы с двумя датчиками и единственной катушки индуктивности позволяет значительно снизить сложность, размеры и энергопотребление устройства, увеличить простоту его установки и настройки. Кроме того, размещение платформы с датчиками на объекте вместо катушки индуктивности позволяет многократно снизить размеры и энергопотребление позиционируемой части устройства.
На фиг.1 представлена структурная схема устройства для определения положения объекта в пространстве.
Предлагаемое устройство состоит из катушки индуктивности 1, катушка индуктивности 1 взаимодействует со стабилизатором тока 2.
Цифровые трехосевые магнитометр 3 и акселерометр 4 расположены на платформе 5 так, что их собственные оси координат сонаправлены. Платформа 5 жестко закреплена на объекте. Магнитометр 3 и акселерометр 4 взаимодействуют с вычислительным блоком 6, который содержит: блок разделения измеренного вектора магнитной индукции 7 на вектор индукции магнитного поля Земли и вектор индукции магнитного поля катушки индуктивности 1; блок вычисления угловых координат 8; блок коррекции направления вектора индукции магнитного поля катушки индуктивности 9 и блок вычисления линейных координат 10. При этом выход магнитометра 3 подключен ко входу блока разделения измеренного вектора магнитной индукции 7, первый выход которого подключен к первому входу блока вычисления угловых координат 8, а второй выход блока 7 подключен к первому входу блока коррекции направления вектора индукции магнитного поля катушки индуктивности 9, выход которого подключен ко входу блока вычисления линейных координат 10, а выход акселерометра 4 подключен ко второму входу блока вычисления угловых координат 8, выход которого подключен ко второму входу блока коррекции направления вектора индукции магнитного поля катушки индуктивности 9.
Катушка индуктивности 1 имеет цилиндрическую форму, диаметр превышает или сопоставим с длиной, сердечник отсутствует, обмотка выполнена изолированным проводом, витки обмотки выполнены вплотную; диаметр катушки, количество витков обмотки и сечение провода определяются исходя из решаемой задачи, для обеспечения необходимого радиуса позиционирования, энергопотребления и габаритов катушки, при этом необходимо контролировать индуктивность и электрическое сопротивление катушки для обеспечения возможности переключения полярности ее тока за заданный интервал времени (тестовая катушка имеет диаметр основания 150 мм, 255 мотков провода с диаметром 0,31 мм, выполненных в 5 слоев, сопротивление 28 Ом, индуктивность 16 мГн, и рассчитана на ток 0,7 А).
Магнитометр 3 и акселерометр 4 выполнены по технологии МЭМС и могут быть представлены как раздельными, так и комбинированным датчиком (например, комбинированный датчик LSM303DLHC компании STMicroelectronics).
Платформа 5 представляет собой печатную плату, на которой расположены магнитометр 3 и акселерометр 4.
Вычислительным блоком 6 служит персональный или одноплатный компьютер, при этом внутренние блоки 7, 8, 9, 10 вычислительного блока 6 представляют собой подпрограммы.
Устройство работает следующим образом.
Управляемый стабилизатор тока 2 катушки 1 подает на катушку постоянный ток определенной величины. Полярность тока задается сигналом, формируемым вычислительным блоком 6. Ток, проходящий через катушку 1, создает магнитное поле. Искусственное магнитное поле катушки 1 складывается с магнитным полем Земли и магнитометр 3 производит измерение вектора магнитной индукции результирующего поля. Одновременно с этим акселерометр 4 производит измерение вектора ускорения свободного падения.
Показания датчиков 3 и 4 в цифровом виде передаются на вычислительный блок 6. Вычислительный блок 6 после получения показаний датчиков 3 и 4 подает сигнал смены полярности на управляемый стабилизатор тока 2. Стабилизатор 2 меняет полярность тока на противоположную (например, был ток 1А, а становится -1А), и процесс повторяется.
Для определения линейных и угловых координат объекта по вектору магнитной индукции, измеренному магнитометром 3, и вектору ускорения свободного падения, измеренному акселерометром 4, вычислительный блок выполняет следующие операции.
На первом шаге блок 7 производит разделение измеренного вектора магнитной индукции на вектор индукции магнитного поля Земли и вектор индукции магнитного поля катушки индуктивности 1. Разделение производится путем сложения и вычитания двух последовательных измерений магнитометра 3, полученных при противоположных полярностях тока катушки 1 и, соответственно, при противоположных направлениях вектора индукции магнитного поля катушки 1:

где  - текущее измерение;
- текущее измерение;
 - вектор индукции магнитного поля Земли;
- вектор индукции магнитного поля Земли;
 - вектор индукции магнитного поля катушки 1 (меняет направление на противоположное при переключении полярности тока стабилизатором 2);
- вектор индукции магнитного поля катушки 1 (меняет направление на противоположное при переключении полярности тока стабилизатором 2);
 - предыдущее измерение.
- предыдущее измерение.
На следующем шаге по направлению найденного вектора индукции магнитного поля Земли и вектора ускорения свободного падения, измеренного акселерометром 4, производится вычисление угловых координат объекта в блоке 8 известным способом [1].
На третьем шаге полученная информация об угловых координатах объекта используется в блоке 9 для коррекции направления найденного вектора индукции магнитного поля катушки 1. В общем случае, объект имеет произвольную ориентацию, неизвестную заранее, и магнитометр 3 производит измерение вектора индукции магнитного поля катушки 1 в своей системе координат, следовательно, необходимо перевести этот вектор из системы координат датчика в систему координат, связанную с неподвижной катушкой 1. Для этой цели и производится коррекция направления вектора индукции магнитного поля катушки 1 путем его обратного поворота на углы, равные угловым координатам объекта. Поворот вектора осуществляется, например, с помощью матриц поворота [2].
На последнем шаге блок 10 по скорректированному вектору индукции магнитного поля катушки 1 производит определение линейных координат объекта относительно катушки 1. Переход от вектора индукции магнитного поля катушки 1 к координатам объекта осуществляется, например, с помощью таблично заданной функции. Таблица представляет собой массив точек пространства, выбранных с определенным шагом, где каждой точке сопоставлен вектор магнитной индукции, создаваемый катушкой индуктивности 1 в данной точке пространства. Расчет векторов производится с помощью закона Био-Савара-Лапласа [3, с.205], с использованием современного программного обеспечения, например математического пакета MATLAB. Для определения линейных координат объекта необходимо найти в таблице вектор, ближайший вектору индукции магнитного поля катушки 1, полученному на предыдущем шаге. Координаты, сопоставленные этому вектору, являются искомыми координатами объекта.
Источники информации
1. Implementing a Tilt-Compensated eCompass using Accelerometer and Magnetometer Sensors / Talat Ozyagcilar // Freescale Semiconductor Application Note. - Document Number AN4248, Revision 3, January 2012.
2. Матрица поворота [Электронный ресурс] // Википедия. - Режим доступа: http://ru.wikipedia.org/wiki/Матрица_поворота.
3. Курс физики: учеб. пособие для вузов / Трофимова Т.И. - 11-е изд., стер. - М.: Издательский центр «Академия», 2006. - 560 с.
4. Авт. св. СССР №1372261, G01R 33/02.
5. Патент РФ №2452652, G01R 33/02.
6. Патент РФ №2171476, G01R 33/02.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА В ПРОСТРАНСТВЕ | 2016 |
|
RU2626755C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ПОДВИЖНОГО ОБЪЕКТА | 2014 |
|
RU2555496C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2005 |
|
RU2285931C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА (ВАРИАНТЫ) | 2004 |
|
RU2257546C1 |
| Способ оценки пространственного и углового положения объекта | 2024 |
|
RU2831368C1 |
| СПОСОБ ОБРАБОТКИ ИНФОРМАЦИИ О ПЕРЕМЕЩЕНИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2436047C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2005 |
|
RU2278356C1 |
| Малогабаритная адаптивная курсовертикаль | 2016 |
|
RU2714144C2 |
| ТРЁХКОМПОНЕНТНЫЙ МАГНИТОМЕТР НА СФЕРИЧЕСКОМ ЖИГ РЕЗОНАТОРЕ И СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛНОГО ВЕКТОРА МАГНИТНОГО ПОЛЯ | 2013 |
|
RU2529448C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2005 |
|
RU2306529C2 |
Изобретение относится к измерительной технике и может найти применение в системах ориентации для определения линейных и угловых координат объекта, свободно перемещаемого в пространстве с шестью степенями свободы. Технический результат - повышение быстродействия. Для этого устройство содержит цифровые трехосевые акселерометр и магнитометр, выходы которых подключены непосредственно к вычислительному блоку. Вычислительный блок содержит: (1) блок разделения измеренного вектора магнитной индукции на вектор индукции магнитного поля Земли и вектор индукции магнитного поля катушки индуктивности; (2) блок вычисления угловых координат; (3) блок коррекции направления вектора индукции магнитного поля катушки индуктивности; (4) блок вычисления линейных координат. При этом выход магнитометра подключен ко входу блока (1), первый выход которого подключен к первому входу блока (2), а второй выход подключен к первому входу блока (3), выход которого подключен ко входу блока вычисления линейных координат, выход акселерометра подключен ко второму входу блока (4), выход которого подключен ко второму входу блока коррекции направления вектора индукции магнитного поля катушки индуктивности. 1 ил.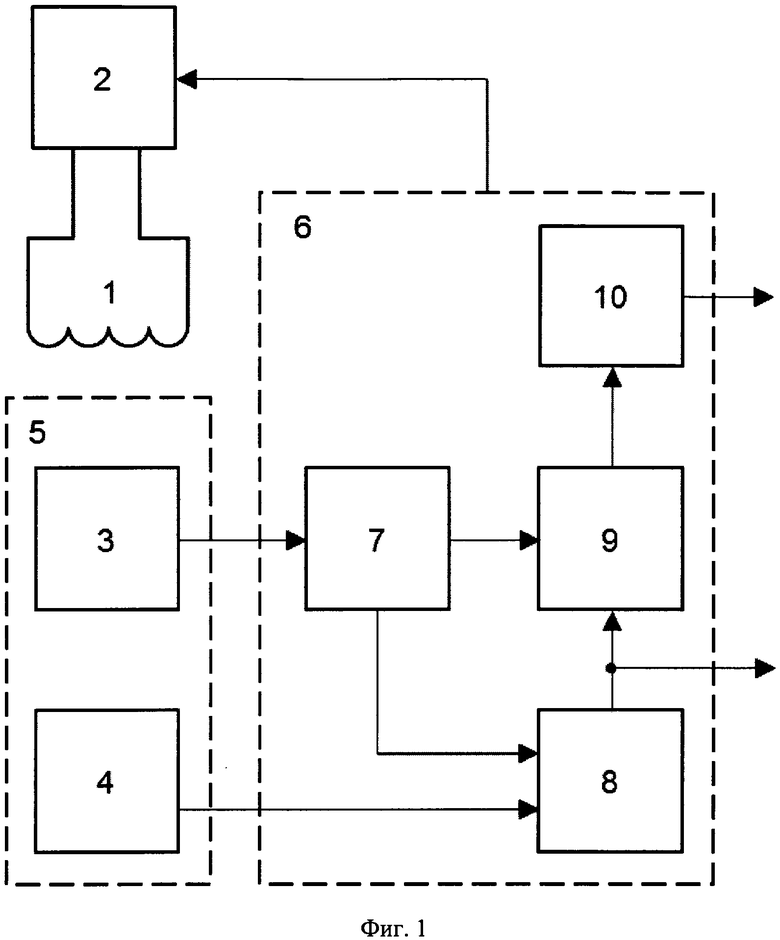
Устройство для определения положения объекта в пространстве, содержащее катушку индуктивности, трехосевой магнитометр, взаимодействующий с вычислительным блоком, отличающееся тем, что катушка индуктивности расположена неподвижно и взаимодействует со стабилизатором тока, который взаимосвязан с вычислительным блоком, при этом устройство содержит расположенные на объекте цифровые трехосевые акселерометр и магнитометр, выходы которых подключены непосредственно к вычислительному блоку, содержащему блок разделения измеренного вектора магнитной индукции на вектор индукции магнитного поля Земли и вектор индукции магнитного поля катушки индуктивности, а также блок вычисления угловых координат, блок коррекции направления вектора индукции магнитного поля катушки индуктивности и блок вычисления линейных координат, при этом выход магнитометра подключен ко входу блока разделения измеренного вектора магнитной индукции, первый выход которого подключен к первому входу блока вычисления угловых координат, а второй выход подключен к первому входу блока коррекции направления вектора индукции магнитного поля катушки индуктивности, выход которого подключен ко входу блока вычисления линейных координат, а выход акселерометра подключен ко второму входу блока вычисления угловых координат, выход которого подключен ко второму входу блока коррекции направления вектора индукции магнитного поля катушки индуктивности.
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА (ВАРИАНТЫ) | 2000 |
|
RU2171476C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА МАГНИТНОГО ПОЛЯ (ВАРИАНТЫ) | 2010 |
|
RU2452652C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА В ОГРАНИЧЕННОМ ПРОСТРАНСТВЕ | 2007 |
|
RU2368309C2 |
| US 3435335 A, 25.03.1969 | |||
| L-координатное устройство для определения положения или перемещения объекта в пространстве | 1987 |
|
SU1519869A1 |

