(Л
ю
другой прикреплен к идиому из трех элементов 6 базирования, связанных с платформой 7, которая, в свою очередь, связана с корпусом 1 шестью пружинами 9, образующими упругую подвеску. Благодаря этуй подвеске плат- форма 7 имеет шесть степеней подвижности. В каждый момент времени потенциометр 3 измеряет текущую длину связанной с ним струны А. Перед подходом схвата промышленного робота, в котором выполнены ответные элементы, при
вод 10 удерживает платформу 7 в нижнем положении. При этом схват промьшшенно- го робота не контактирует с элементами 6 базирования. После остановки промышленного робота привод 10 поворачивает кривошип 11, что приводит к движению вверх платформы 7. Элементы 6 базирования занимают определенное положение на объекте (схвате), поэтому длины струн являются координатами этого объекта (схвата) н их значения регистрируются блоком 13. 7 з.п. ф-лы, 1 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения скорости потока | 1991 |
|
SU1789934A1 |
| Промышленный робот | 1985 |
|
SU1301685A1 |
| Система управления промышленным роботом | 1981 |
|
SU1127767A1 |
| Многокомпонентный датчик усилий и моментов | 1982 |
|
SU1045020A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА В ПРОСТРАНСТВЕ | 2013 |
|
RU2542793C1 |
| КОМПЛЕКС ДЛЯ ПРОВЕДЕНИЯ ТРАНСКРАНИАЛЬНОЙ МАГНИТНОЙ СТИМУЛЯЦИИ | 2023 |
|
RU2817476C1 |
| СПОСОБ ОБРАБОТКИ ОБЪЕМНЫХ ОБЪЕКТОВ | 2015 |
|
RU2597864C1 |
| СИСТЕМА АКТИВНОЙ ВИБРОЗАЩИТЫ И СТАБИЛИЗАЦИИ | 2008 |
|
RU2406620C2 |
| Устройство для управления сборочным роботом | 1980 |
|
SU1075233A1 |
| СПОСОБ ОБРАБОТКИ ОБЪЁМНЫХ ОБЪЕКТОВ | 2016 |
|
RU2623632C1 |
Изобретение относится к машиностроению и может быть использовано, например, в робототехнике при исследовании точности позиционирования промышленного робота. Цель изобретения - повышение надежности и точности определения положения или перемещения объекта путем исключения ударных воздействий и уменьшения точек базирования на позиционируемом объекте. Устройство содержит корпус 1, шесть однокоординатных измерительных преобразователей 2 линейных перемещений, каждый из которых состоит из потенциометра 3 и струны 4, один конец которой намотан на вал потенциометра 3, а другой прикреплен к одному из трех элементов 6 базирования, связанных с платформой 7, которая, в свою очередь, связана с корпусом 1 шестью пружинами 9, образующими упругую подвеску. Благодаря этой подвеске платформа 7 имеет шесть степеней подвижности. В каждый момент времени потенциометр 3 измеряет текущую длину связанной с ним струны 4. Перед подходом схвата промышленного робота, в котором выполнены ответные элементы, привод 10 удерживает платформу 7 в нижнем положении. При этом схват промышленного робота не контактирует с элементами 6 базирования. После остановки промышленного робота привод 10 поворачивает кривошип 11, что приводит к движению вверх платформы 7. Элементы 6 базирования занимают определенное положение на объекте (схвате), поэтому длины струн являются координатами этого объекта (схвата) и их значения регистрируются блоком 13. 7 з.п. ф-лы, 1 ил.
Изобретение относится к машиностроению и может быть испо 1ьзовано, например, и робототехнике при исследсжа- нии точности позиционирования промышленных роботов (ПР)о
Целью изобретения является повышение надежности и точности определения положения или перемещения объекта в пространстве путем исключения ударных воздействий и уменьшения числа точек базирования на позиционируемом объекте.
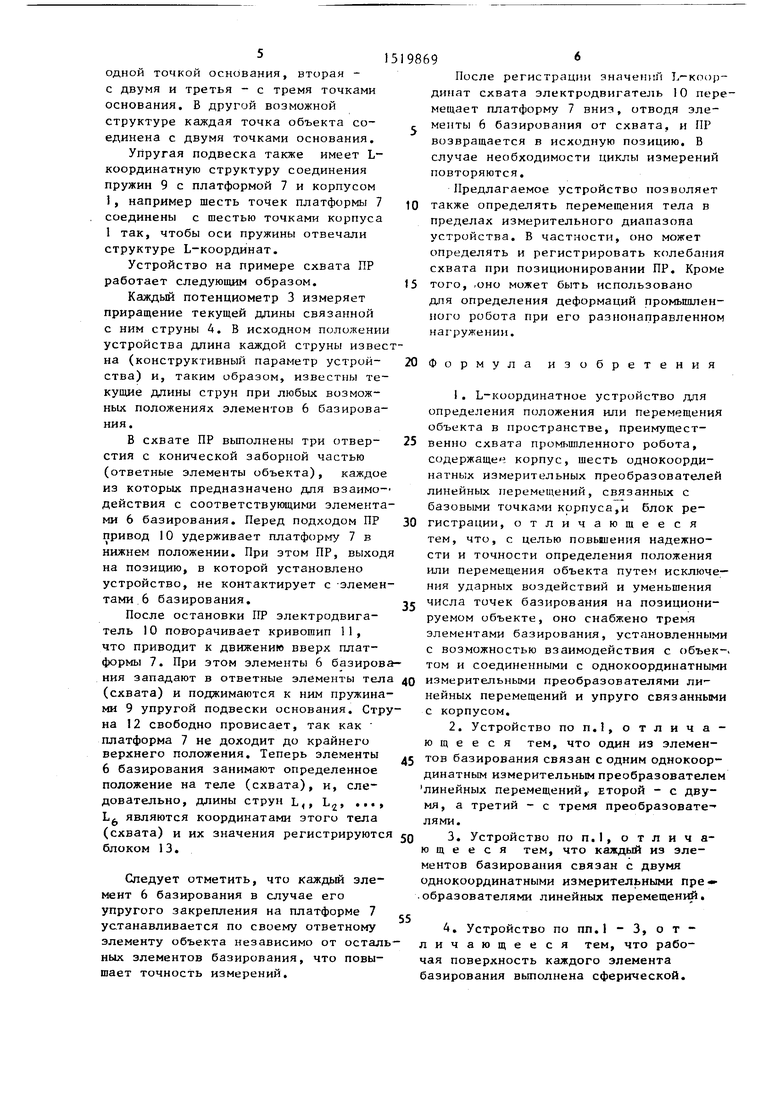
На чертеже приведена схема предлагаемого устройства.
Устройство содержит корпус 1, шесть однокоординатпых измерительных преобразователей 2 Л11нейных перемеще.- НИИ, каждый из которых состоит из враш,ающегося потенциометра 3 и струны 4. С одного конца каждая струна 4 намотана на вал потенциометра 3 (несколько витков дли исключения проскальзывания относительно вала) и связана с одним концом пружины 5 растяжения, второй конец которой закрегшен на корпусе 1. Второй конец каждой струны 4 прикреплен к одному из трех элементов 6 базирования, рабочая поверхность которого вьтолнена в виде сферы. Элементы 6 базирования связаны с платформой 7 посредством упругих или жестких связей 8. Платформа 7 связана с корпусом I шестью пружинами 9, образуюшдчми упругую подвеску, обеспечивающую ей шесть степеней подвижности относительно корпуса.
Устройство с:набжено приводом 10 (электродвигателем) перемещения элементов 6 базирования. Па валу электродвигателя у1:1 ановлен кривошип 11, связанный струной 12 с платформой 7.
0
5
0
5
0
5
0
5
Вььходы потенциометров 3 связаны с со- ответствуюшд ми входами регистрирующего блока 13.
В устройстве для определения положения или перемещения тела н пространстве используется метод L-коордиНат. Положение тела в пространстве характеризуется его координатами. В системе L-координат положение твердого тела в пространстве определяется при помо- ш,и шести чисел L, L, .,., L , равных длинам отрезков (струн), соединяющих точки Texia с точками неподвижной базы (корпуса) так, что при данных значениях L, Lg, ... Lg образуется геометрически неизменяемая структура. L-координаты образуют как бы пространственные фермы, стержнями которых являются отрезки L,, L, .«.,
L.
По аналогии с пространственными формами число точек в L-координатах на неподвижной базе (корпусе) и объекта должно быть не менее трех и не более шести и они не должны лежать на одной прямой. При этом недопустимо: пересечение в одной точке более трех отрезков, расположение в одной плоскости не более трек отрезков, параллельность трех отрезков и пересечение трех других в одной точке, расположение всех отрезков в двух- плоскостях.
В устройстве может быть использована одна из двух структур L-координат, В каждой из этих двух структур на неподвижной базе (корпусе) расположено шесть точек, а на объекте - три. Характер соединения точек базы с точками объекта в одной структуре таков: одна точка тела соединена с
После регистрации значешш 1 -координат охвата электродвигатель 10 перемещает платформу 7 вниз, отводя эле- с менты 6 базирования от схвата, и ПР возвращается в исходную позицию, В случае необходимости циклы измерений повторяются.
Предлагаемое устройстве позволяет также определять перемещения тела в пределах измерительного диапазона устройства, В частности, оно может определять и регистрировать колебания схвата при позиционировании ПР. Кроме 15 того, ,оно может быть использовано
для определения деформаций промьшшен- ного робота при его разнонаправленном нагружении.
10
одной точкой основания, вторая - с двумя и третья - с тремя точками основания, В другой возможной структуре каждая точка объекта соединена с двумя точками основания.
Упругая подвеска также имеет L- координатную структуру соединения пружин 9 с платформой 7 и корпусом 1, например шесть точек платформы 7 соединены с шестью точками корпуса 1 так, чтобы оси пружины отвечали структуре L-координат.
Устройство на примере схвата ПР работает следующим образом.
Каждый потенциометр 3 измеряет приращение текущей длины связанной с ним струны 4, В исходном положении устройства длина каждой струны известна (конструктивный параметр устрой- 20 Формула ства) и, таким образом, известны текущие длины струн при любых возможных положениях элементов 6 базирования,
В схвате ПР выполнены трн отверстия с конической заборной частью (ответные элементы объекта), каждое из которых предназначено для взаимо-- действия с соответствующими элементами 6 базирования. Перед подходом ПР привод 10 удерживает платформу 7 в нижнем положении. При этом ПР, выходя на позицию, в которой установлено устройство, не контактирует с -элементами 6 базирования.
После остановки ПР электродвигатель 10 понорачивает кривошип 11, что приводит к движению вверх платформы 7, При этом элементы 6 базирования западают в ответные элементы тела до измерительными преобразователями ли- (схвата) и поджимаются к ним пружина- нейных перемещений и упруго связанными ми 9 упругой подвески основания. Струна 12 свободно провисает, так как
изобретения
1, L-координатное устройство для определения положения или перемещения объекта в пространстве, преимущест25 венно схвата промьппленного робота, содержаще корпус, шесть однокоорди- натных измерительных преобразователей линейных перемещений, связанных с базовыми точка.ми корпуса,и блок ре30 гистрации, отличающееся тем, что, с целью повышения надежности и точности определения положения или перемещения объекта путем исключения ударных воздействий и уменьшения
г числа точек базирования на позиционируемом объекте, оно снабжено тремя элементами базирования, установленными с возможностью взаимодействия с объектом и соединенными с однокоординатными
с корпусом,
2,Устройство по п.1, отличающее с я тем, что один из элеменплатформа 7 не доходит до крайнего верхнего положения. Теперь элементы 6 базирования занимают определенное положение на теле (схвата), и, следовательно, длины струн L,, L2
Lg, являются координатами этого тела (схвата) и их значения регистрируютс блоком 13.
Следует отметить, что каждый элемент 6 базирования в случае его упругого закрепления на платформе 7 устанавливается по своему ответному элементу объекта независимо от осталных элементов базирования, что повышает точность измерений.
519869
После регистрации значешш 1 -координат охвата электродвигатель 10 перемещает платформу 7 вниз, отводя эле- с менты 6 базирования от схвата, и ПР возвращается в исходную позицию, В случае необходимости циклы измерений повторяются.
Предлагаемое устройстве позволяет также определять перемещения тела в пределах измерительного диапазона устройства, В частности, оно может определять и регистрировать колебания схвата при позиционировании ПР. Кроме 15 того, ,оно может быть использовано
для определения деформаций промьшшен- ного робота при его разнонаправленном нагружении.
10
20 Формула
изобретения
Формула
измерительными преобразователями ли- нейных перемещений и упруго связанными
1, L-координатное устройство для определения положения или перемещения объекта в пространстве, преимущественно схвата промьппленного робота, содержаще корпус, шесть однокоорди- натных измерительных преобразователей линейных перемещений, связанных с базовыми точка.ми корпуса,и блок регистрации, отличающееся тем, что, с целью повышения надежности и точности определения положения или перемещения объекта путем исключения ударных воздействий и уменьшения
числа точек базирования на позиционируемом объекте, оно снабжено тремя элементами базирования, установленными с возможностью взаимодействия с объек. том и соединенными с однокоординатными
о измерительными преобразователями ли- нейных перемещений и упруго связанными
Q
с корпусом,
2,Устройство по п.1, отличающее с я тем, что один из элемен5 тов базирования связан с одним однокоор- динатным измерительным преобразователем линейных перемещений,, второй - с двумя, а третий - с тремя преобразовате- ля ми.
А. Устройство по ПП.1 - 3, о т - личающееся тем, что рабочая поверхность каждого элемента базирования вьтолнена сферической.
1519869fi
жено платформой, установленной в7, Устройство по пп.5 и 6, о т л икорпусе на упругой подвеске, а ба- чающееся тем, что связь
эирующие элементы связаны с этойбазирующих элементов с платформой
платформой.выполнена упругой.

| Галлай Ю.М | |||
| и др | |||
| Метод оценки точности позиционирования промышленного робота на основе L-координат.- Иямерительная техника, 1986, № 5, с.10, рис | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
