При швартовке и прохождении узкостей необходимы дополнительные средства активного управления судном - подруливающие устройства (ПУ), а также способы их управления.
Изобретение относится к области судостроения и касается средств активного управления судном, а более конкретно ПУ. В способе используют движители (гребные винты), электропривод и систему управления.
Целью предлагаемого изобретения является формирование автоматического регулирования движением судна в режиме швартовки и прохождения узкостей с использованием электропривода, движителей, дальномеров и системы управления, основанной на методе параметрической оптимизации.
Известен способ управления движением судна по заданной траектории (патент RU 2483973 от 10.06.2013), использующий введение подсистемы стабилизации судна в поперечном направлении. Недостатком способа является сложность прокладки маршрута, подбор карт необходимого масштаба при формировании программных параметров.
Известен также способ автоматической проводки судов (патент RU 2277495 от 10.06.2006). Недостатком способа является необходимость измерения множества параметров: ветра и волнения, углы тяги, обороты движителей, обороты подруливающего устройства, глубина под килем, траектория движения центра тяжести, носовой и кормовой оконечностей и пр.
В качестве ближайшего аналога (прототипа) выбран способ швартовки судна (патент RU 2330789 от 10.08.2008), состоящий в управлении движением судна по заданному направлению с выходом на заданную точку режима швартовки с использованием приемника спутниковой навигационной системы, радаров, регулятора оборотов гребного винта, рулевого привода и носового подруливающего устройства.
К недостаткам ближайшего аналога (прототипа) следует отнести низкую точность определения расстояния до препятствия из-за использования радара и низкую управляемость при швартовке из-за использования одного ПУ.
Задачей изобретения является настройка параметров регулятора системы оптимального управления, которые рассчитываются в зависимости от минимального времени переходного процесса при известных показаниях дальномера в условиях влияния внешней среды, определяемых спектральными характеристиками ветроволновых возмущений.
Поставленная задача решается благодаря тому, что в способе швартовки судна, включающем рулевой привод, носовое подруливающее устройство из п.1 формулы изобретения, предусмотрены следующие отличия:
- наличие двух ПУ (в кормовой и носовой частях судна);
- использование локальных измерителей (дальномеров);
- использование метода параметрической оптимизации.
Сущность предложенного способа заключается в следующем.
ПУ установлены в поперечных каналах, расположенных в кормовой и носовой частях судна, и позволяют корректировать процесс швартовки или прохождения узкостей.
Способ оптимального управления подруливающими устройствами при швартовке и прохождении узкостей проиллюстрирован на фиг.1, на которой:
1 - выпрямитель (В1) носовой части судна;
2 - автономный инвертор напряжения (АИН1) носовой части судна;
3 - асинхронный двигатель (АД1) носовой части судна;
4 - система управления (СУ1) носовой части судна;
5 - дальномер (Д1) носовой части судна;
6 - гребной винт носовой части судна;
7 - выпрямитель (В2) кормовой части судна;
8 - автономный инвертор напряжения (АИН2) кормовой части судна;
9 - асинхронный двигатель (АД2) кормовой части судна;
10 - система управления (СУ2) кормовой части судна;
11 - дальномер (Д2) кормовой части судна;
12 - гребной винт кормовой части судна.
На входы блоков 1 и 7 поступает трехфазное переменное напряжение частотой 50 Гц. В этих блоках переменное напряжение преобразуется в пульсирующее однонаправленное напряжение. Затем выпрямленное напряжение с блоков 1 и 7 подается на емкостные фильтры С1 и С2, которые обеспечивают уменьшение амплитуды пульсаций. С выходов фильтров напряжение поступает на вход блоков 2 и 8, каждый из которых выполнен по схеме трехуровневого АИН с фиксированной нулевой точкой с биполярными транзисторами с изолированным затвором в качестве активных ключей. В этих блоках осуществляется преобразование входного пульсирующего однонаправленного напряжения в переменное напряжение заданной частоты и действующего значения. С выхода блоков 2 и 8 преобразованное напряжение поступает на блоки 3 и 9, в которых происходит электромеханическое преобразование энергии. С выхода блоков 3 и 9 механическая энергия посредством жесткой связи передается на гребные винты 6 и 12. Данные о дистанции до препятствия, вырабатываемые в блоках 5 и 11, передаются по коммуникационному каналу на дискретные входы блоков 4 и 10, реализованных на микроконтроллерной технике и осуществляющих регулирование скоростей и моментов АД1 и АД2 (блоков 3 и 9 соответственно), изменяя частоту и действующее значение напряжения на их входе, посредством управления активными ключами в 2 и 8. При этом для реализации регулирования скоростей и моментов 3 и 9 в 4 и 10 применяются векторные алгоритмы управления с элементами оптимального управления по времени. Расчет сигналов управления активными ключами 2 и 8 происходит после синхронизации блоков 4 и 10 по двунаправленному коммуникационному каналу и расчета параметров заданных алгоритмов управления 3 и 9.
Питание АД осуществляется от преобразователя частоты с неуправляемым 24-пульсным В в звене постоянного тока. Использование алгоритмов векторной широтно-импульсной модуляции на выходе трехуровневого АИН позволяет аппроксимировать синусоидальное напряжение заданной частоты и заданного действующего значения. Регулирование скоростей и моментов АД1 и АД2 в СУ1 и СУ2 реализовано на векторных алгоритмах управления с элементами оптимального управления по времени. На основании данных Д1, Д2 и датчиков дрейфа после синхронизации СУ1 и СУ2 рассчитываются оптимальные траектории движения переменных состояния АД1 и АД2. После этого в СУ1 и СУ2 рассчитываются значения коэффициентов обратных связей для реализации параметрической оптимизации в составе системы векторного управления с косвенной ориентацией по потокосцеплению ротора. Предлагаемый способ векторного управления отличается раздельным независимым многоканальным регулированием скорости и потокосцепления. Известный способ векторного управления модифицирован с учетом возможности адаптации настроек регуляторов переменных состояния в зависимости от вариации параметров двигателей и внешней среды.
Технический результат представляет собой повышение маневренности судна в условиях узкостей и швартовки за счет расположения ПУ в кормовой и носовой частях судна и повышение точности позиционирования судна за счет использования оптимального управления с учетом информации, получаемой с датчиков. Внедрение данного способа позволит осуществлять швартовку без помощи буксира и повысить безопасность прохождения судном узкостей.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ШВАРТОВКИ СУДНА | 2006 |
|
RU2330789C1 |
| ПОДРУЛИВАЮЩЕЕ УСТРОЙСТВО СУДНА | 2013 |
|
RU2542825C2 |
| Способ и система швартовки судна | 2020 |
|
RU2747521C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СУДНОМ | 2004 |
|
RU2248914C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ПОДХОДА СУДНА К ПРИЧАЛУ | 2009 |
|
RU2403169C1 |
| ЛЕДОКОЛЬНОЕ СУДНО С ПОДРУЛИВАЮЩИМ УСТРОЙСТВОМ, ВЫПОЛНЕННЫМ С ИСПОЛЬЗОВАНИЕМ ШТАТНОГО НАСОСА ТУШЕНИЯ ПОЖАРОВ НА АВАРИЙНЫХ СУДАХ | 2015 |
|
RU2616503C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА ПО ШИРОТЕ И ДОЛГОТЕ | 2012 |
|
RU2516885C2 |
| Подруливающее устройство судна | 2020 |
|
RU2745758C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДОВ | 2005 |
|
RU2277495C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА ПО ЗАДАННОЙ ТРАЕКТОРИИ | 2011 |
|
RU2483973C2 |
Изобретение относится к области судостроения и касается средств активного управления судном. Оптимальное управление подруливающими устройствами при швартовке и прохождении узкостей заключается в применении подруливающих устройств. Подруливающие устройства состоят из выпрямителя, фильтра, автономного инвертора напряжения, системы управления, асинхронного двигателя, дальномера и винта. Система управления реализовывается на микроконтроллерной технике и осуществляет расчеты параметров заданных законов управления. В кормовой и носовой частях судна используется два подруливающих устройства, а вместо радаров используются дальномеры. Достигается повышение маневренности и точности позиционирования судна, повышение безопасности прохождения узкостей судном. 1 з.п. ф-лы, 1 ил.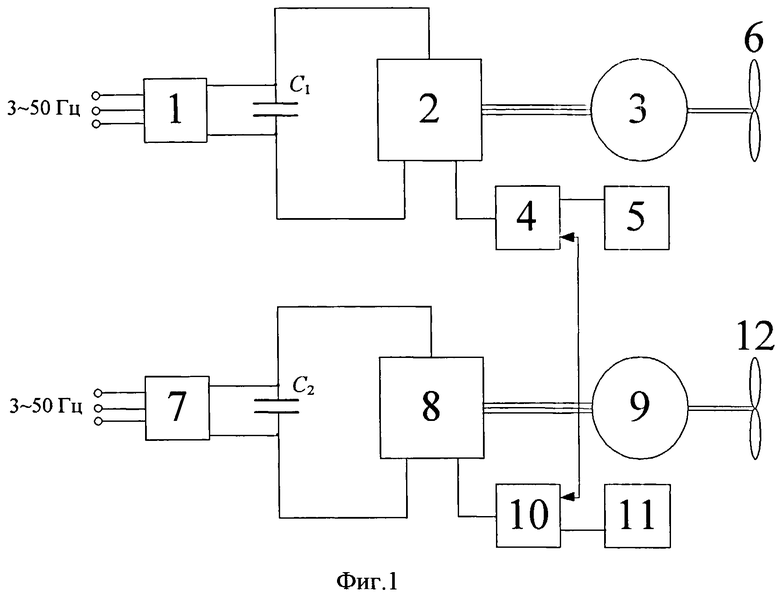
1. Способ оптимального управления подруливающими устройствами (ПУ) при швартовке и прохождении узкостей заключается в применении ПУ, состоящих из выпрямителя (В), фильтра (С), автономного инвертора напряжения (АИН), системы управления (СУ), реализованной на микроконтроллерной технике и осуществляющей расчеты параметров заданных законов управления, асинхронного двигателя (АД), дальномера (Д) и винта, отличающийся тем, что используется два ПУ - в кормовой и носовой частях судна, а вместо радаров используются дальномеры.
2. Способ по п.1, отличающийся тем, что в предложенном способе используется система оптимального управления, заключающаяся в использовании метода параметрической оптимизации с вычислением коэффициентов линейной обратной связи по доступным для измерения переменным состояния, что обеспечивает максимально возможное быстродействие при минимуме необходимой измерительной аппаратуры и значительно упрощает структуру СУ.
| СПОСОБ ШВАРТОВКИ СУДНА | 2006 |
|
RU2330789C1 |
| ПОДРУЛИВАЮЩЕЕ УСТРОЙСТВО СУДНА | 2011 |
|
RU2487817C2 |
| СПОСОБ ДИСТАНЦИОННОГО ВОЗДЕЙСТВИЯ ВОЛНОВЫМИ СИГНАЛАМИ НА ОПАСНЫЙ ОБЪЕКТ ДАННОГО ТИПА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2500035C2 |
| ВИХРЕВАЯ ПРЯМОТОЧНАЯ ГИДРОТУРБИНА ДЛЯ ИСПОЛЬЗОВАНИЯ ЭНЕРГИИ ТЕЧЕНИЙ РЕК И ПРИЛИВОВ | 2007 |
|
RU2359149C1 |

