Изобретение относится к области судовождения, в частности к системам автоматического управления движением судна.
Наиболее близким к изобретению является система автоматического управления судном RU 2248914 С1, МПК 8 В63Н 25/04, опубл. 27.03.2005, содержащая блок измерения текущих параметров движения судна с датчиками путевого угла, угловой скорости, датчик кормовых рулей, выходы которых подключены к входам первого сумматора-усилителя, выход которого соединен с входом рулевого привода кормовых рулей, датчик угла дрейфа и датчик носовых рулей, выход которого подключен к первому входу второго сумматора-усилителя, датчик и задатчик бокового смещения судна, задатчик допустимого угла дрейфа и блок логики. Указанные сумматоры-усилители образуют блок выработки сигналов управления движение судна при его швартовке. Система автоматического управления судном RU 2248914 С1 обеспечивает автоматическое движение судна с заданным углом дрейфа и заданным боковым параллельным перемещением (швартовкой) при одновременной стабилизации заданного угла курса.
Система, описанная в патенте RU 2248914 С1, обладает следующими недостатками: а) при приближении судна к причалу скорость должна снижаться, а это будет вызывать понижение эффективности кормовых и носовых рулей, что приведет к уменьшению точности выхода судна к причалу; б) на абсолютном большинстве существующих и строящихся судов носовой руль отсутствует, что делает невозможным применение этой системы на большинстве современных судов.
Техническим результатом является обеспечение безударного автоматического подхода судна к причалу с высокой точностью.
Указанный технический результат достигается тем, что в устройстве для автоматического подхода судна к причалу, содержащем главные движители, кормовое и носовое подруливающие устройства, блок измерения текущих параметров движения судна с датчиками путевого угла, угловой скорости поворота и курса судна, блок выработки сигналов управления, выходами подключенного к главным движителям, к кормовому и носовому подруливающим устройствам, блок измерения текущих параметров движения судна снабжен датчиками координат центра масс, скорости поступательного движения и силы тяги главных движителей судна, введены автоматические регуляторы поступательной скорости, путевого угла и угла курса судна, с тремя входами каждый, блок расчета теоретической траектории с тремя входами и тремя выходами, вычислитель заданных параметров движения судна с четырьмя входами и тремя выходами и блок постоянной памяти с четырьмя выходами, в котором записаны параметры точки остановки, формируемые на первом выходе блока постоянной памяти, минимальный допустимый радиус кривизны траектории движения судна, формируемый на втором выходе блока постоянной памяти, коэффициенты законов управления поступательной скоростью, путевым углом, углом курса судна, формируемые на третьем выходе блока постоянной памяти, и параметры, определяющие закон торможения судна, формируемые на четвертом выходе блока постоянной памяти, при этом первые входы указанного блока расчета, автоматических регуляторов и третий вход вычислителя заданных параметров движения судна соединены с выходом упомянутого блока измерения текущих параметров движения судна, второй и третий входы указанного блока расчета подключены соответственно к первому и второму выходам блока постоянной памяти, а первый, второй и третий выходы указанного блока расчета связаны с судоводителем, первым и вторым входами вычислителя заданных параметров движения судна соответственно, четвертый вход которого подключен к четвертому выходу блока постоянной памяти, а первый, второй и третий выходы указанного вычислителя соединены соответственно со вторыми входами указанных автоматических регуляторов, третьими входами подключенных к третьему выходу блока постоянной памяти, а выходами - к первому, второму и третьему входам блока выработки сигналов управления соответственно, четвертый вход которого соединен с третьим выходом блока постоянной памяти.
Отличие устройства также заключается в том, что указанный блок расчета содержит последовательно соединенные между собой вычислитель набора параметров, входы которого являются первым и вторым входами указанного блока расчета, вычислитель оптимальных значений и блок сравнения, второй вход которого является третьим входом указанного блока расчета, первый, второй и третий выходы которого образованы соответственно выходом блока сравнения и вторыми выходами упомянутых вычислителей блока расчета.
Изобретение поясняется чертежами.
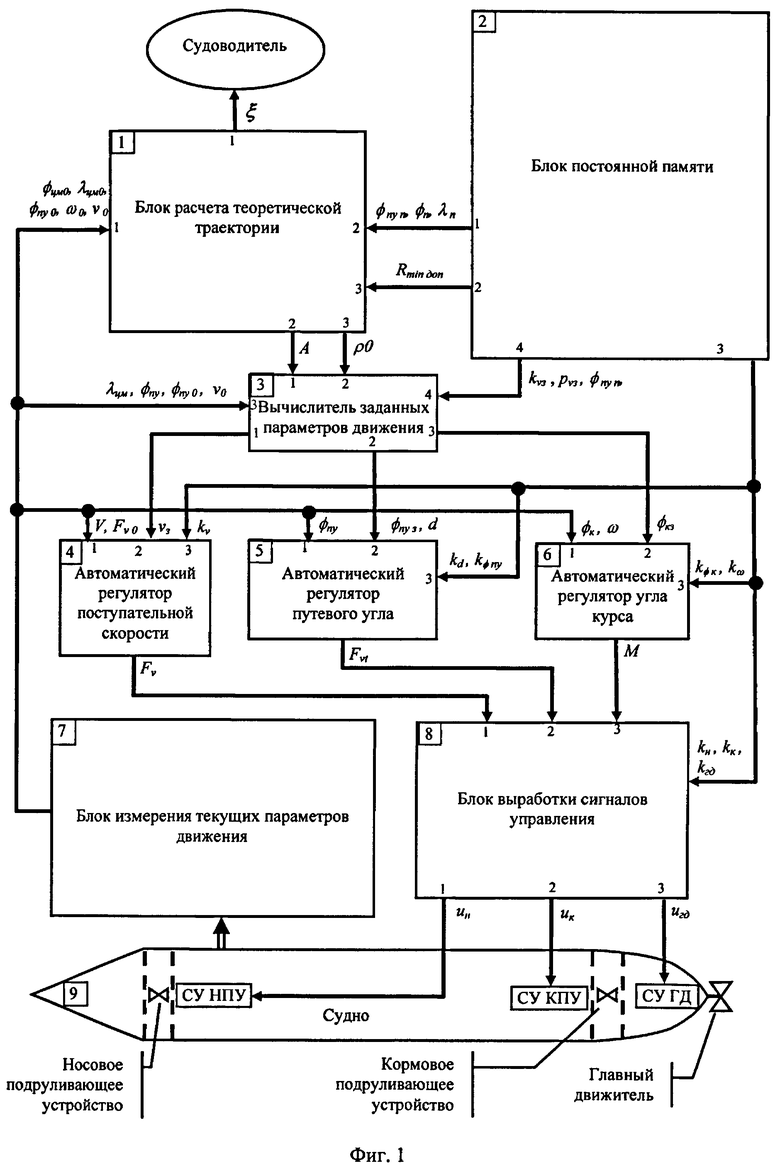
Фиг.1 - структурно-функциональная схема устройства для автоматического подхода судна к причалу.
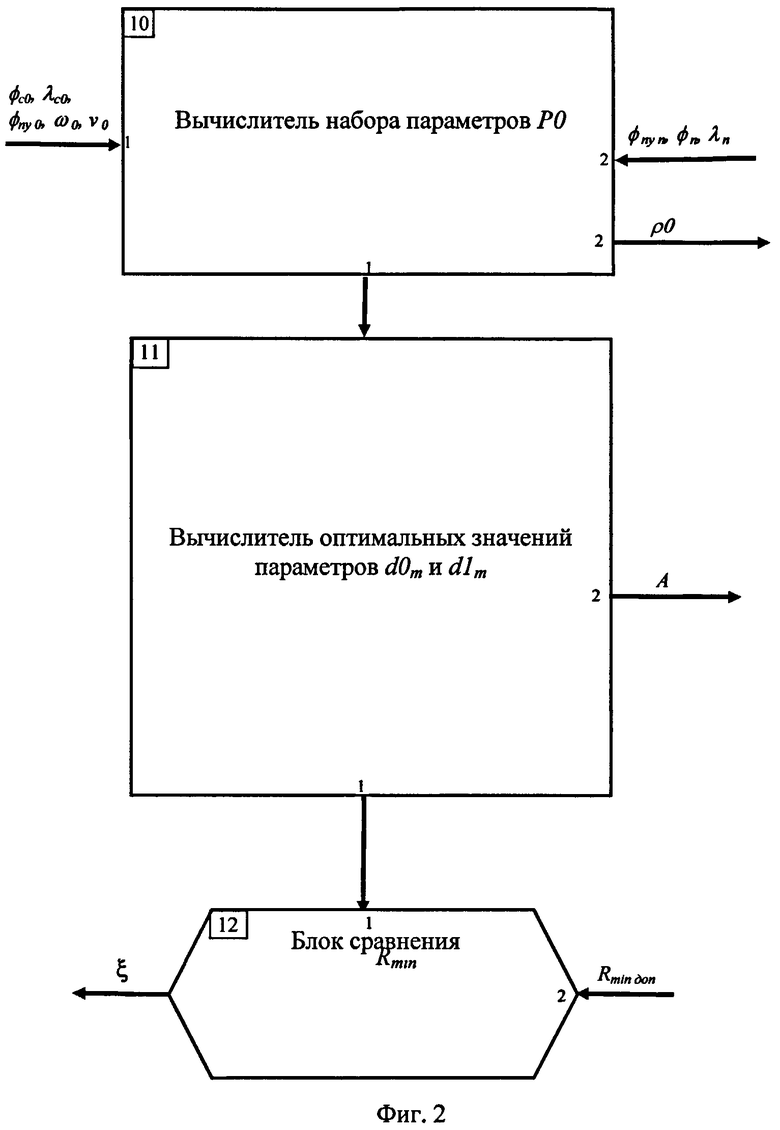
Фиг.2 - функциональная схема блока расчета теоретической траектории подхода судна к причалу.
Устройство для автоматического подхода судна к причалу содержит блок 1 расчета теоретической траектории (фиг.1), блок 2 постоянной памяти, вычислитель 3 заданных параметров движения, автоматический регулятор 4 поступательной скорости, автоматический регулятор 5 путевого угла, автоматический регулятор 6 угла курса, блок 7 измерения текущих параметров движения, блок 8 выработки сигналов управления. Блок 7 измерения текущих параметров движения механически связан с корпусом судна 9.
Первый вход блока 1 расчета теоретической траектории связан с выходом блока 7 измерения текущих параметров движения. Второй вход блока 1 расчета теоретической траектории связан с первым выходом блока 2 постоянной памяти. Третий вход блока 1 расчета теоретической траектории связан со вторым выходом блока 2 постоянной памяти. Первый выход блока 1 расчета теоретической траектории передает информацию судоводителю. Второй выход блока 1 расчета теоретической траектории связан с первым входом вычислителя 3 заданных параметров движения. Третий выход блока 1 расчета теоретической траектории связан со вторым входом вычислителя 3 заданных параметров движения.
Третий вход вычислителя 3 заданных параметров движения связан с выходом блока 7 измерения текущих параметров движения. Четвертый вход вычислителя 3 заданных параметров движения связан с четвертым выходом блока 2 постоянной памяти. Первый выход вычислителя 3 заданных параметров движения связан со вторым входом автоматического регулятора 4 поступательной скорости. Второй выход вычислителя 3 заданных параметров движения связан со вторым входом автоматического 5 регулятора путевого угла. Третий выход вычислителя 3 заданных параметров движения связан со вторым входом автоматического регулятора 6 угла курса.
Первый вход автоматического регулятора 4 поступательной скорости связан с выходом блока 7 измерения текущих параметров движения. Третий вход автоматического 4 регулятора поступательной скорости связан с третьим выходом блока 2 постоянной памяти. Выход автоматического регулятора 4 поступательной скорости связан с первым входом блока 8 выработки сигналов управления.
Первый вход автоматического регулятора 5 путевого угла связан с выходом блока 7 измерения текущих параметров движения. Третий вход автоматического регулятора 5 путевого угла связан с третьим выходом блока 2 постоянной памяти. Выход автоматического регулятора 5 путевого угла связан со вторым входом блока 8 выработки сигналов управления.
Первый вход автоматического регулятора 6 угла курса связан с выходом блока 7 измерения текущих параметров движения. Третий вход автоматического регулятора 6 угла курса связан с третьим выходом блока 2 постоянной памяти. Выход автоматического регулятора 6 угла курса связан с третьим входом блока 8 выработки сигналов управления.
Первый выход блока 8 выработки сигналов управления связан с системой управления носовым подруливающим устройством (СУ НПУ) судна 9. Второй выход блока 8 выработки сигналов управления связан с системой управления кормовым подруливающим устройством (СУ КПУ) судна 9. Третий выход блока 8 выработки сигналов управления связан с системой управления главными движителями (СУ ГД) судна 9.
Блок 1 расчета теоретической траектории содержит вычислитель 10 набора параметров Р0 (фиг.2), вычислитель 11 оптимальных значений параметров d0m и d1m, блок 12 сравнения. Выход блока 7 измерения текущих параметров движения соединен с первым входом вычислителя 10 набора параметров Р0. Первый выход блока 2 постоянной памяти соединен со вторым входом вычислителя 10 набора параметров Р0 10, образующим второй вход блока 1 расчета теоретической траектории. Первый выход вычислителя 10 набора параметров Р0 соединен с входом вычислителя 11 оптимальных значений параметров d0m и d1m. Второй выход вычислителя 10 набора параметров Р0, образующий третий выход блока 1 расчета теоретической траектории, соединен со вторым входом вычислителя 3 заданных параметров движения. Первый выход вычислителя 11 оптимальных значений параметров d0m и d1m соединен с первым входом блока 12 сравнения. Второй выход блока 2 постоянной памяти соединен со вторым входом блока 12 сравнения, образующим третий вход блока 1 расчета, теоретической траектории. Выход блока 12 сравнения, образующий первый выход блока 1 расчета теоретической траектории, передает информацию судоводителю. Второй выход вычислителя 11 оптимальных значений параметров d0m и d1m, образующий второй выход блока 1 расчета теоретической траектории, соединен с первым входом вычислителя 3 заданных параметров движения.
Устройство для автоматического подхода судна к причалу работает следующим образом.
Перед началом работы устройства в блок 2 постоянной памяти записываются следующие данные: направление нормали к причальной стенке, направленной в сторону берега, ϕпу n и координаты конечной точки траектории подхода к причалу - широта ϕп, долгота λп; минимальный допустимый радиус кривизны траектории движения судна Rmin доп.; коэффициент закона управления поступательной скоростью kν, умножающийся на отклонение текущей путевой скорости от заданной; коэффициенты закона управления путевым углом - коэффициент kd, умножающийся на величину текущего бокового отклонения судна от заданной траектории, коэффициент kϕ_пу, умножающийся на отклонение текущего путевого угла от заданного; коэффициенты закона управления углом курса - коэффициент kϕ к, умножающийся на отклонение текущего курса от заданного, коэффициент kω, умножающийся на текущее значение угловой скорости поворота судна в горизонтальной плоскости.
В момент принятия решения судоводителем о начале подхода к причалу блок 1 расчета теоретической траектории вырабатывает сигнал ξ, который принимает значение 1, если из текущего состояния движения судна можно выполнять автоматический подход к причалу, или 0 в обратном случае.
Если судоводитель принял решение об автоматическом подходе к причалу, то с заданной периодичностью цикла управления начинают работать: вычислитель 3 заданных параметров движения, автоматический регулятор 4 поступательной скорости, автоматический регулятор 5 путевого угла, автоматический регулятор 6 угла курса, блок 7 измерения параметров движения, блок 8 выработки сигналов управления, а носовое подруливающее устройство, кормовое подруливающее устройство и главный движитель начинают отрабатывать соответствующие сигналы управления.
Для обеспечения проведения расчетов введем местную систему координат XY, начало координат которой совпадет с конечной точкой траектории подхода к причалу (ϕп, λп); ось Х направлена на восток, ось Y направлена на север.
Когда принимается решение об автоматическом подходе к причалу в блоке 1 расчета теоретической траектории, выполняются следующие действия. Начинает работать вычислитель 10 набора параметров Р0, входящий в состав блока 1 расчета теоретической траектории.
Вычислитель 10 набора параметров Р0 получает: от блока 7 измерений текущих параметров текущие географические координаты (ϕцм0, λцм0), текущий путевой угол судна ϕпу 0, текущую угловую скорость поворота корпуса судна в горизонтальной плоскости ω0, текущую скорости судна ν0; от блока 2 постоянной памяти направление нормали к причальной стенке, направленной в сторону берега, ϕпу n, координаты конечной точки траектории подхода к причалу: широта ϕп, долгота λп, минимальный допустимый радиус кривизны траектории движения судна Rmin доп.
Вычислитель 10 набора параметров Р0 переводит географические координаты текущего положения центра масс судна (ϕцм0, λцм0) и координаты конечной точки траектории подхода к причалу (ϕп, λп) в координаты в местной системе координат r0=(х0,y0)T и r1=(х1,y1)T соответственно.
Вычислитель 10 набора параметров Р0 заполняет элементы набора параметров Р0 согласно выражению (1) и передает набор параметров Р0 в вычислитель 11 оптимальных значений параметров d0m и d1m.

где r0=(x0,y0)T - двумерный вектор координат начальной точки теоретической траектории в местной системе координат,
r1=(x1,y1)T - двумерный вектор координат конечной точки траектории подхода к причалу,
ϕпу 0 - текущий путевой угол судна,
ϕпу n - направление нормали к причальной стенке, направленной в сторону берега,
d0, d1 - начальное приближение положительных чисел, определяющих кривизну во внутренних точках теоретической траектории подхода судна к причалу,
k0 - кривизна в начальной точке теоретической траектории r0.
В блоке 1 расчета теоретической траектории текущий путевой угол судна ϕпу 0 используется как путевой угол в начальной точке теоретической траектории.
Кривизна k0 в точке (ϕс0, ϕс0) вычисляется с помощью формулы (2).
 ,
,
где ω0 - угловая скорость поворота корпуса судна в горизонтальной плоскости в начальной точке теоретической траектории,
ν0 - продольная скорость движения судна в начальной точке теоретической траектории.
Точка r0 является точкой соединения предыдущей фактической траектории движения судна и начальной точки теоретической траектории выхода судна на заданную прямолинейную траекторию прохождения узкости.
Вычислитель 10 набора параметров Р0 вычисляет расстояние ρ0 в местной системе координат от точки r0 начала теоретической траектории до точки r1 конца траектории подхода к причалу по формуле (3) и передает расстояние ρ0 в вычислитель заданных параметров движения 3.
 ,
,
где r0 - двумерный вектор координат начальной точки теоретической траектории в местной системе координат,
r1 - двумерный вектор координат конца траектории подхода к причалу в местной системе координат.
Вычислитель 11 оптимальных значений параметров d0m, и d1m работает следующим образом. Для математического описания теоретической траектории подхода судна к причалу используется векторный вещественный полином (4).

где коэффициенты полинома a0, a1,…, an - постоянные двумерные векторы,
 - скалярные базисные полиномы С.Н.Бернштейна. Базисные полиномы Бернштейна определяются формулой (5).
- скалярные базисные полиномы С.Н.Бернштейна. Базисные полиномы Бернштейна определяются формулой (5).

Базисные полиномы Бернштейна используются для представления теоретической траектории подхода судна к причалу, т.к. они обладают более высокой вычислительной устойчивостью, чем обычные степенные полиномы.
Первая и вторая производные полинома R5(u) могут быть представлены выражениями (6) и (7) соответственно.

 ,
,
где a0, a1, …, a5 - двумерные коэффициенты полинома R5(u).
При u, изменяющемся от 0 до 1, точка R5(u) перемещается в местной системе координат XY по теоретической траектории подхода судна к причалу от начальной точки r0 теоретической траектории до конечной точки теоретической траектории r1.
Значения параметров d0m и d1m, которые обеспечивают минимальную величину максимальной кривизны теоретической траектории подхода судна к причалу, находятся с помощью решения следующей минимаксной задачи (8).
 ,
,
где k(d0, d1, u) - кривизна кривой, задаваемой векторным полиномом R5(u),
km - минимум максимальной кривизны теоретической траектории подхода судна к причалу.
Кривизна k(d0, d1, u) вычисляется по известной формуле (9)
 ,
,
где R'5(u)- первая производная по u векторного полинома R5(u),
R''5(u) - вторая производная по u векторного полинома R5(u).
Двумерные коэффициенты a0, a1, … a5, использующиеся в векторных полиномах R5(u), R'5(u), R''5(u), вычисляются по формулам (10)
где r0 - двумерный вектор координат начальной точки теоретической траектории в местной системе координат,
d0m - параметр, который обеспечивает минимальную величину максимальной кривизны теоретической траектории подхода судна к причалу,
ϕпу 0 - путевой угол в начальной точке теоретической траектории,
k0 - кривизна в начальной точке теоретической траектории r0,
d1m - параметр, который обеспечивает минимальную величину максимальной кривизны теоретической траектории подхода судна к причалу,
ϕпу n - направление нормали к причальной стенке, направленной в сторону берега.
Набор коэффициентов A={a0, a1, …, a5} векторного полинома R5(u) соответствующих оптимальным значениям параметров d0m и d1m, найденным в выражении (8), передается в вычислитель 3 заданных параметров движения.
Минимальный радиус кривизны Rmin=1/km теоретической траектории подхода судна к причалу вычисляется по формуле (11) и передается в блок 12 сравнения.

Блок 12 сравнения работает следующим образом. Блок 12 сравнения получает от блока 2 постоянной памяти минимальный допустимый радиус кривизны теоретической траектории Rmin доп. Если минимальный радиус кривизны теоретической траектории Rmin меньше минимального допустимого радиуса кривизны траектории судна Rmin доп, то сигналу ξ присваивается 0, что сообщает судоводителю о невозможности вывода судна на заданную прямолинейную траекторию прохождения узкости из текущего положения судна. Судоводитель должен принять решение о переводе судна в другое исходное положение.
Если минимальный радиус кривизны теоретической траектории Rmin не меньше минимального допустимого радиуса кривизны траектории судна Rmin доп, то сигналу ξ присваивается 1, что сообщает судоводителю о возможности выполнения автоматического подхода к причалу.
Сигнал ξ блок сравнения 12 передает судоводителю для принятия решения о дальнейших действиях.
В начале работы вычислитель 3 заданных параметров движения принимает от блока 7 измерения текущих параметров движения продольную скорость движения судна ν0, путевой угол судна ϕпу 0, принимает от блока 2 постоянной памяти положительные параметры kνз, ρνз, определяющие закон торможения судна и направление нормали к причальной стенке ϕпу n, направленной в сторону берега.
В вычислителе 3 заданных параметров движения на каждом цикле управления выполняются следующие действия. Вычислитель 3 заданных параметров движения принимает от блока 7 измерения текущих параметров движения, географические координаты текущего положения центра масс судна (ϕцм, λцм) и преобразует их в двумерный вектор координат r в местной системе координат. Для вычисления заданных параметров движения, соответствующих текущему положению судна, с помощью выражений (12) вычисляется значение скалярного параметра uз.
где r двумерный вектор координат текущего положения судна в местной системе координат,
r0 - двумерный вектор координат начальной точки теоретической траектории в местной системе координат,
ρ0 - расстояние от начальной точки теоретической траектории до конечной точки траектории подхода судна к причалу.
В случае нахождения судна вблизи теоретической траектории подхода судна к причалу параметр uз, вычисленный по формуле (12), обеспечивает получение координат точки rз=R5(uз) на теоретической траектории подхода к причалу, близкой к текущему положению судна.
Затем с помощью формулы (13) вычисляются координаты касательного вектора Tu в точке теоретической траектории подхода судна к причалу, соответствующей значению скалярного параметра uз.
 ,
,
где R'5(u) - первая производная полинома R5(u),
uз - параметр точки на теоретической траектории, близкой к текущему местоположению судна.
Заданный путевой угол ϕпу з вычисляется по формуле (14) с учетом того, что путевой угол отсчитывается от направления на север.

где Tu 2 - координата у касательного вектора Tu,
Tu1 - координата х касательного вектора Tu.
Боковое отклонение d текущего положения судна от заданного вычисляется с помощью скалярного произведения векторов по формуле (15).
 ,
,
где r двумерный вектор координат текущего положения судна в местной системе координат,
R5(uз) - векторный полином, задающий теоретическую траекторию подхода судна к причалу,
uз - параметр точки на теоретической траектории, близкой к текущему местоположению судна,
e - единичный вектор, перпендикулярный заданному путевому углу ϕпу з.
Заданный путевой угол ϕпу з и боковое отклонение d текущего положения судна от заданного передаются в автоматический регулятор путевого угла 5.
Заданная поступательная скорость νз вычисляется по формуле (16).

где ν0 - продольная скорость движения судна в начальной точке теоретической траектории,
tanh - функция гиперболический тангенс,
kνз, pνз - положительные параметры, определяющие закон торможения судна,
uз - параметр точки на теоретической траектории, близкой к текущему местоположению судна.
Увеличение параметра kνз приводит к уменьшению времени торможения. Параметр должен лежать в диапазоне от нуля до единицы. Увеличение параметра рνз приводит к увеличению времени торможения.
Заданная поступательная скорость νз передается в автоматический регулятор поступательной скорости 4.
Заданный угол курса ϕкз вычисляется по формуле (17).

где ϕк 1 - угол курса судна в конечной точке траектории подхода к причалу,
ϕпу 0 - путевой угол в начальной точке теоретической траектории,
uз - параметр точки на теоретической траектории, близкой к текущему местоположению судна.
Угол курса судна ϕкз в конечной точке траектории подхода к причалу равен направлению нормали к причальной стенке ϕпу n, направленной в сторону берега плюс или минус 90 градусов.
Заданный угол курса ϕк з передается в автоматический регулятор 5 угла курса.
В начале работы автоматический регулятор 4 поступательной скорости получает от блока 2 постоянной памяти коэффициент закона управления поступательной скоростью kν, умножающийся на отклонение текущей путевой скорости от заданной и получает от блока 7 измерения текущих параметров движения силу тяги главных движителей Fν 0. В автоматическом регуляторе 4 поступательной скорости на каждом цикле управления выполняются следующие действия. Автоматический регулятор 4 поступательной скорости принимает от блока 7 измерения текущих параметров движения текущее значение поступательной скорости ν и принимает от вычислителя 3 заданных параметров движения заданную поступательную скорость νз.
Сила, направленная вдоль вектора поступательной скорости движения судна, Fνi+1, вычисляется по формуле (18).
 ,
,
где Fν i - сила, направленная вдоль вектора поступательной скорости движения судна, вычисленная на предыдущем шаге работы устройства,
kν - коэффициент закона управления поступательной скоростью умножающийся на отклонение текущей путевой скорости от заданной,
ν - текущее значение поступательной скорости,
νз - заданная поступательная скорость продольного движения судна.
В начале работы автоматический регулятор 5 путевого угла получает от блока 2 постоянной памяти коэффициент kd, умножающийся на величину текущего бокового отклонения судна от заданной траектории и коэффициент kϕпу, умножающийся на отклонение текущего путевого угла от заданного.
В автоматическом регуляторе 5 путевого угла на каждом цикле управления выполняются следующие действия. Автоматический регулятор 5 путевого угла принимает от блока 7 измерения текущих параметров движения путевой угол судна ϕпу.
Сила Fνt, перпендикулярная направлению вектора поступательной скорости движения судна, вычисляется по формуле (19).

где kd - коэффициент, умножающийся на величину бокового отклонения судна от заданной траектории d,
kϕпу - коэффициент, умножающийся на отклонение путевого угла от заданного,
d - отклонение текущего положения судна от заданного,
ϕпуi - текущий путевой угол судна,
ϕпу з - заданный путевой угол.
Вычисленное значение силы Fνi, перпендикулярной направлению вектора поступательной скорости движения судна, передается в блок 8 выработки сигналов управления.
В начале работы автоматический регулятор 6 угла курса получает от блока 2 постоянной памяти коэффициент kϕ к, умножающийся на отклонение текущего курса от заданного, коэффициент kω, умножающийся на текущее значение угловой скорости поворота судна в горизонтальной плоскости.
В автоматическом регуляторе 6 угла курса на каждом цикле управления выполняются следующие действия. Автоматический регулятор 6 угла курса принимает от блока 7 измерения текущих параметров движения угол курса судна ϕк, угловую скорость ω поворота корпуса судна в горизонтальной плоскости.
Момент М, поворачивающий судно в горизонтальной плоскости, вычисляется по формуле (20).

где kω - коэффициент, умножающийся на текущее значение угловой скорости поворота судна в горизонтальной плоскости,
kϕк - коэффициент, умножающийся на отклонение текущего курса от заданного,
ω - текущая угловая скорость поворота корпуса судна в горизонтальной плоскости,
ϕк - текущий курсовой угол судна,
ϕкз - заданный курсовой угол судна.
Вычисленное значение момента М, поворачивающего судно в горизонтальной плоскости, передается в блок 8 выработки сигналов управления.
В блоке 8 выработки сигналов управления на каждом цикле управления с помощью выражений (21) вычисляются сигналы управления: носовым подруливающим устройством uн, кормовым подруливающим устройством uк и главным движителем uгд.
 ,
,
где kн - коэффициент перевода упора носового подруливающего устройства в величину сигнала управления,
Fνt, - сила, перпендикулярная направлению вектора поступательной скорости движения судна,
ls - расстояние от кормы до центра масс судна,
β - угол дрейфа, равный разности между текущим путевым углом ϕny и курсовым углом ϕк,
М - момент, поворачивающий судно в горизонтальной плоскости.
Fν - сила, направленная вдоль вектора поступательной скорости движения судна,
kк - коэффициент перевода упора кормового подруливающего устройства в величину сигнала управления,
kгд - коэффициент перевода упора главного движителя сигнала управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ВЫВОДА СУДНА НА ЗАДАННУЮ ПРЯМОЛИНЕЙНУЮ ТРАЕКТОРИЮ ПРОХОЖДЕНИЯ УЗКОГО УЧАСТКА ФАРВАТЕРА И УДЕРЖАНИЯ ЕГО НА ЭТОЙ ТРАЕКТОРИИ | 2009 |
|
RU2406645C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДНА | 2021 |
|
RU2759068C1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ТРАЕКТОРИИ ПЕРЕВОДА СУДНА НА ПАРАЛЛЕЛЬНЫЙ КУРС С СОБЛЮДЕНИЕМ ОГРАНИЧЕНИЙ НА ДИАПАЗОН ИЗМЕНЕНИЯ СИГНАЛА УПРАВЛЕНИЯ | 2012 |
|
RU2515006C1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ТРАЕКТОРИИ ПЕРЕВОДА СУДНА НА НОВЫЙ КУРС | 2012 |
|
RU2491509C1 |
| СПОСОБ ШВАРТОВКИ СУДНА | 2006 |
|
RU2330789C1 |
| СПОСОБ ШВАРТОВКИ СУДНА | 2007 |
|
RU2350506C1 |
| Способ и система швартовки судна | 2020 |
|
RU2747521C1 |
| СИСТЕМА КООРДИНИРОВАННОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА В РЕЖИМАХ АВТОМАТИЧЕСКОГО И ДИСТАНЦИОННОГО УПРАВЛЕНИЯ | 2020 |
|
RU2741669C1 |
| СПОСОБ ПРОВОДКИ, ШВАРТОВКИ И ОТШВАРТОВКИ МОРСКОГО ГРУЗОВОГО СУДНА В АВТОНОМНОМ РЕЖИМЕ И СПОСОБ РАБОТЫ ЦИФРОВОЙ ИНСТРУМЕНТАЛЬНОЙ ПЛАТФОРМЫ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ГРУППЫ АВТОНОМНЫХ СУДОВ-БУКСИРОВ В ПОРТОВОЙ АКВАТОРИИ | 2023 |
|
RU2809129C1 |
| СПОСОБ КООРДИНИРОВАННОГО МАНЕВРИРОВАНИЯ СУДНА | 2010 |
|
RU2429161C1 |
Изобретение относится к области судовождения и может быть использовано для автоматического подхода судна к причалу. В устройстве для автоматического подхода судна к причалу блок измерения текущих параметров движения судна снабжен датчиками координат центра масс, скорости поступательного движения судна. В устройство введены автоматические регуляторы поступательной скорости, путевого угла и угла курса судна, связанные с входами блока выработки сигналов управления главными движителями, кормовым и носовым подруливающими устройствами судна. Имеются также блок расчета теоретической траектории, блок постоянной памяти, вычислитель заданных параметров движения судна, соответствующим образом связанные между собой и с другими узлами устройства. Техническим результатом является обеспечение безударного подхода судна к причалу с высокой точностью. 1 з.п. ф-лы, 2 ил.
1. Устройство для автоматического подхода судна к причалу, содержащее главные движители, кормовое и носовое подруливающие устройства, блок измерения текущих параметров движения судна с датчиками путевого угла, угловой скорости поворота и курса судна, блок выработки сигналов управления, выходами подключенный к главным движителям, к кормовому и носовому подруливающим устройствам, отличающееся тем, что блок измерения текущих параметров движения судна снабжен датчиками координат центра масс, скорости поступательного движения и силы тяги главных движителей судна, введены автоматические регуляторы поступательной скорости, путевого угла и угла курса судна, с тремя входами каждый, блок расчета теоретической траектории с тремя входами и тремя выходами, вычислитель заданных параметров движения судна с четырьмя входами и тремя выходами и блок постоянной памяти с четырьмя выходами, в котором записаны параметры точки остановки, формируемые на первом выходе блока постоянной памяти, минимальный допустимый радиус кривизны траектории движения судна, формируемый на втором выходе блока постоянной памяти, коэффициенты законов управления поступательной скоростью, путевым углом, углом курса судна, формируемые на третьем выходе блока постоянной памяти, и параметры, определяющие закон торможения судна, формируемые на четвертом выходе блока постоянной памяти, при этом первые входы указанного блока расчета автоматических регуляторов и третий вход вычислителя заданных параметров движения судна соединены с выходом упомянутого блока измерения текущих параметров движения судна, второй и третий входы указанного блока расчета подключены соответственно к первому и второму выходам блока постоянной памяти, первый выход указанного блока расчета предназначен для передачи информации судоводителю, а второй и третий выходы связаны с первым и вторым входами вычислителя заданных параметров движения судна соответственно, четвертый вход которого подключен к четвертому выходу блока постоянной памяти, а первый, второй и третий выходы указанного вычислителя соединены соответственно со вторыми входами указанных автоматических регуляторов, третьими входами подключенных к третьему выходу блока постоянной памяти, а выходами - к первому, второму и третьему входам блока выработки сигналов управления соответственно, четвертый вход которого соединен с третьим выходом блока постоянной памяти.
2. Устройство по п.1, отличающееся тем, что указанный блок расчета содержит последовательно соединенные между собой вычислитель набора параметров, входы которого являются первым и вторым входами указанного блока расчета, вычислитель оптимальных значений и блок сравнения, второй вход которого является третьим входом указанного блока расчета, первый, второй и третий выходы которого образованы соответственно выходом блока сравнения и вторыми выходами упомянутых вычислителей блока расчета.
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СУДНОМ | 2004 |
|
RU2248914C1 |
| СПОСОБ ШВАРТОВКИ СУДНА | 2006 |
|
RU2330789C1 |
| СПОСОБ ШВАРТОВКИ СУДНА | 2007 |
|
RU2350506C1 |
| СПОСОБ ЭКСПЕРИМЕНТАЛЬНОГО ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТОВ МАТЕМАТИЧЕСКОЙ МОДЕЛИ ДВИЖЕНИЯ СУДНА | 1999 |
|
RU2151713C1 |

