Предлагаемое изобретение относится к области судовождения - управлению движением судна по заданному направлению с выходом на заданную точку режима швартовки с использованием приемника спутниковой навигационной системы, радаров, регулятора оборотов гребного винта, рулевого привода и носового подруливающего устройства.
Известен "Способ экспериментального определения параметров математической модели движения судна" (патент России №2151713). В рассматриваемом способе, благодаря использованию информации о состоянии судна от приемника спутниковой навигационной системы, удается идентифицировать все коэффициенты полной математической модели движения судна, чтобы обеспечить автоматическое управление движением судна и режим швартовки.
Известен также патент США (US 5916284 Ship maneuvering assistance system), облегчающий судоводителю процесс ручной швартовки, достаточно близкий патенту России №2245914 в отношении объема используемой информации.
Нами в качестве прототипа принята «Система автоматического управления движением судна» (патент России №2245914, Б.И. №9, март 05 г.), в которой реализован способ швартовки судна. Способ основан на использовании сигналов от приемника спутниковой навигационной системы, датчиков кормовых, носовых рулей и датчика оборотов гребного винта. Формирование законов управления рулевыми приводами кормовых и носовых рулей осуществляют с использованием сигнала текущего и заданного курса (для кормовых рулей) и сигналов расстояния до пирса и угла дрейфа (для формирования управления носовыми рулями или подруливающими механизмами. При достижении судном заданного заранее расстояния до пирса изменяют закон управления рулевым приводом, обеспечивая поддержание заданного (ограниченного) значения угла дрейфа.
Недостатками рассмотренных способов управления движением судна при швартовке являются:
- использование только части исполнительных средств для управления движением судна, судоводитель перестраивает скорость хода судна, вплоть до знака, что требует, в свою очередь, перехода на чисто ручное управление,
- невозможность обеспечения автоматического управления движением судна в режиме швартовки (известные способы автоматического управления движением судна являются в действительности полуавтоматическими, т.к. требуют непрерывного участия судоводителя в управлении),
- второй этап швартовки не обеспечивает выход судна в заданную центральную точку швартовки на пирсе.
В предлагаемом способе отмеченные выше недостатки устраняются благодаря:
- отключению штатного управления движением судна при выходе судна в заданную точку A0 (в момент времени начала режима швартовки - t0);
- формированию двух этапов режима швартовки судна от точки А0 до точки Б и от точки Б (начало второго этапа режима швартовки) до центральной точки швартовки судна - Аконеч., находящейся на пирсе.
С использованием:
- вычислителя,
- блока программного управления,
- носовых подруливающих устройств,
- регулятора оборотов гребного винта,
- носовых и кормовых радаров, размещенных в носу судна и на корме,
- информации о фазовом состоянии судна от приемника спутниковой навигационной системы и задания координат точки швартовки судна Аконеч. и точки Б (формируемой по достижению длины вектора заданного путевого угла фиксированному значению), - приближения величины текущего путевого угла к заданному программному значению путевого угла с помощью носового подруливающего устройства на первом этапе швартовки до т. Б и с использованием подсистемы управления оборотами гребного винта на втором этапе швартовки от т. Б до т. Аконеч. (вблизи т. Аконеч.),
- управления носовым подруливающим устройством на втором этапе швартовки от т. Б до т. Аконеч. с использованием сигналов расстояний от судна до пирса, получаемых от носового и кормового радаров,
- управления углом курса по программе в функции от длины вектора заданного путевого угла с помощью рулевого привода на первом этапе швартовки, а на втором этапе с помощью того же рулевого привода, но с корректировкой знака угла отклонения руля в зависимости от знака сигнала скорости хода судна,
- управления скоростью хода судна по программе, вырабатываемой в блоке программного управления в функции от длины вектора путевого угла.
Целью предлагаемого способа управления движением судна является формирование автоматического управления движением судна в режиме швартовки с использованием вычислителя, блока программного управления, рулевого привода, носовых подруливающих устройств, регулятора оборотов гребного винта и двух радаров.
Рассмотрим, как реализуется предложенный способ и устраняются отмеченные выше недостатки.
Способ швартовки судна используется после выхода судна в заданную точку A0 маршрута, в которую ее выводит штатная система управления движением судна (см. приведенное выше описание прототипа, точка A0 задается судоводителем как начало режима швартовки в виде заданной широты и долготы судна).
Сигналы, формируемые в блоке программного управления:
- условия перехода управлений с первого этапа ко второму этапу,
- программных фазовых состояний судна, в функции от длины вектора заданного путевого угла - Li,
- координаты т.т. Б, Аконеч..
Все сигналы управления формируют в вычислителе.
Описание способа швартовки судна (последовательность операций).
Операция швартовки начинается в момент времени t0, когда судно достигнет заданную штурманом на карте точку А0 (начало режима швартовки), при этом штатная система автоматического управления движением судна отключается.
1. Формирование длины вектора Li.
В вычислитель в момент времени t0 вводят сигналы: Фi=Ф0, λi=λ0 из приемника СНС и сигналы координат т. Аконеч. из программного блока Фконеч., Аконеч., по которым формируют сигнал Li0 - расстояние между точкой А0 (Фi=Ф0, λi=λ0) и точкой Аконеч.(Фконеч., λконеч.)). Сигнал длины Li0 формируют с момента времени t0 в вычислителе через интервалы времени Δt и подают в блок программного управления до Li=Li конеч.=0.
2. Формирование сигнала заданного путевого угла COG здi..
В момент времени t0(соответствующий нахождению судна в точке А0) используют сигналы Фi=Ф0, λi=λ0 из приемника СНС и сигналы центральной точки швартовки Фконеч., λконеч из блока программного управления, по которым формируют в вычислителе сигнал заданного путевого угла COGздi..=COGзд0;

Сигнал заданного путевого угла COG зд.1 формируют через интервал времени Δt с использованием широт и долгот текущего местонахождения судна t1=t0+Δt - точка A1 и точки Аконеч..
3. В функциональных преобразователях блока программного управления формируют:
- программные сигналы курса - ϕпрог. и скорости хода судна Vпрог. с использованием сигнала Li. (ϕпрог.=f1 (Li), Vпрог.=f2 (Li),
где Li - длина вектора путевого угла COG зд.i,
Сигнал условия нахождения судна в области первого или второго этапа швартовки формируют сравнением сигнала Li с введенным заранее в блок программного управления постоянным сигналом Lm длины вектора заданного путевого угла в точке Б:


где Li - текущая длина вектора заданного путевого угла,
Lm - заданное значение длины вектора заданного путевого угла,
соответствующее точке Б (расстояние от т. Б до т. А конеч.),
при выполнении условия (2) формируют сигналы управления по п.5,
при выполнении условия (3) формируют сигналы управления по п.6.
4. Формирование в вычислителе исходных сигналов:
1) из блока программного управления вводят программные сигналы
а) курса судна ϕпрог.=f1 (Li),
б) скорости хода судна Vпрог.=f2 (Li),
в) Аконеч. (точка Аконеч. находится на пирсе - будущая точка швартовки центра судна, задана судоводителем в виде широты Ф конеч. и долготы λконеч.),
г) сигнал условия нахождение судна в области первого или второго этапа швартовки (2) или (3),
2) из приемника СНС вводят сигналы:
а) текущего путевого угла COG,
б) текущих координат судна Фi, λi,
в) текущей скорости хода судна Vi.
3) Из датчика руля вводят сигнал текущего значения руля δ.
4) Из датчика угловой скорости вводят сигнал текущей угловой скорости судна ω.
5) Из датчика оборотов вводят сигнал текущих оборотов гребного винта n.
6) Из датчика тяги вводят сигнал текущей тяги - Т носовых подруливающих устройств.
7) Из радаров вводят сигналы Lнос, Lкор - расстояние от носа и кормы судна до пирса.
5. Управление судном на первом этапе швартовки (от т. А0 до т. Б, если выполняется условие (2).).
Формирование сигналов управления рулевым приводом, носовыми подруливающими устройствами и регулятором оборотов гребного винта.
Законы управления, вырабатываемые в вычислителе:
1) рулевым приводом для поддержания текущего угла курса ϕ, близким к программному значению ϕпрог.i):

где d/dt δ - сигнал скорости перекладки руля,
(ϕ-ϕпрог.i) - сигнал рассогласования по курсу,
ω - сигнал угловой скорости судна,
δ, δзд.i - сигналы текущего и заданного угла перекладки руля,
К1,2 - коэффициенты регулирования.
2) носовым подруливающим устройством для поддержания путевого угла, близким к заданному значению:

где Т, d/dt Т - сигналы тяги подруливающего устройства и скорости ее изменения,
COG, COG зд.i - сигналы текущего и заданного путевого угла,
∫(COG-COG зд.i)dt - сигнал интеграла от угла рассогласования путевого угла,
КI - коэффициенты регулирования.
3) регулятором оборотов гребного винта для поддержания скорости хода судна, близкой к программной:

где d/dt n, d/dt V - сигналы производных от оборотов гребного винта и скорости хода судна,
К1,2 - коэффициенты регулирования,
(V-Vпрог.i) - сигналы рассогласования текущей скорости хода судна относительно программного значения.
Сигналы d/dt δ, d/dt Т и d/dt n из вычислителя подают с момента времени t0 до tm через интервалы времени At соответственно на входы:
- рулевого привода,
- носового подруливающего устройства.
- регулятора оборотов гребного винта.
6. Формирование сигналов управления рулевым приводом, носовыми подруливающими устройствами и регулятором оборотов гребных винтов, на втором этапе режима швартовки при переходе судна из точки Б в точку Аконеч.(выполняется зависимость (3))
1) поддержание текущего угла курса ϕ, близким к программному значению ϕпрог.
1а.) управление рулевым приводом,

где sig V. - знак "+" при движении судна вперед,
знак "-" при движении судна назад,
d/dt δ - скорость перекладки руля,
(ϕ-ϕпрог) - сигнал рассогласования по курсу,
δ, δзд. - текущий и заданный угол перекладки руля,
К1 - коэффициент регулирования.
2б) Носовым подруливающим устройством формируем в виде:

Lнос., Lкор - сигналы расстояний до пирса от носа и кормы судна, вырабатываемые носовым и кормовым радарами,
K3,4 - коэффициенты регулирования,
С - заданная величина боковой скорости судна.
3а) управление регулятором оборотов гребного винта для поддержания скорости хода судна, близкой к программной:

3б) Управление регулятором оборотов гребного винта для поддержания текущего путевого угла вблизи заданного значения:

где d/dt n, d/dt V - сигналы производных от оборотов гребного винта и скорости хода судна,
К1,2 - коэффициенты регулирования,
(V-Vпрог) - рассогласование скорости хода судна относительно программного значения.
Lогр. - заданное судоводителем постоянная величина.
Сигналы d/dt δ, d/dt Т и d/dt n из вычислителя подают с момента времени tm через интервалы времени Δt соответственно на входы:
- рулевого привода,
- носового подруливающего устройства,
- регулятора оборотов гребного винта.
Описание системы автоматической швартовки судна.
Рассмотрим возможный вариант реализации предложенного выше способа. На чертеже приведена блок-схема системы автоматической швартовки судна, содержащая: приемник СНС 1, рулевой привод 2, носовое подруливающее устройство 3, датчик руля 4, блок программного управления 5, датчик угловой скорости 6, вычислитель 7, датчик оборотов 8, радары 9, датчик тяги 10, регулятор оборотов гребного винта 11, объект управления - судно 12.
Система швартовки подключается в момент времени t0, когда судно достигнет заданную штурманом на карте точку А0 - (начало режима швартовки), при этом штатная система автоматического управления движением судна отключается.
1. Выработка сигнала заданного путевого угла COG зд.i. вектора движения судна из точки Δ0 в точку - Аконеч. с использованием сигналов широт и долгот текущего состояния судна Фi, λi, (в момент времени t0 точка А0).
Сигнал COG зд формируют в вычислителе - 7 с использованием в сигналов текущих значений Фi, λi (место нахождения судна, сигналы поступают из приемника СНС-1), сигнал центральной точки швартовки судна у пирса - точка Аконеч. (Фконеч., λконеч.) поступает из блока программного управления - 5, таким образом сигнал заданного значения путевого угла в вычислителе - 7 вырабатывается вида (1).
2. Формирование длины вектора Li.
В вычислитель - 7 вводят сигналы: Фi=Ф0, λi=λ0 из приемника СНС-1 и сигналы координат т. Аконеч. из программного блока - 5. Сигнал длины Li вырабатывается постоянно с момента времени t0 в вычислителе - 7 через интервалы времени Δt и подают в блок программного управления - 5.
3. В функциональных преобразователях блока программного управления - 5 формируются:
- программные сигналы курса - ϕпрог. и скорости хода судна Vпрог. с использованием сигнала Li. (ϕпрог.=f1 (Li), Vпрог.=f2 (Li).
Сигнал условия нахождение судна в области первого или второго этапа швартовки формируют сравнением сигнала Li с введенным заранее в блок программного управления постоянным сигналом Lm длины вектора заданного путевого угла в точке Б (условие (2) или (3)).
4. Введение в вычислитель - 7 исходных сигналов:
1) из блока программного управления - 5 вводят программные сигналы
а) курса судна ϕпрог.=f1 (Li),
б) скорости хода судна Vпрог.=f2 (Li),
в) Аконеч.
г) сигнал условия нахождения судна в области первого или второго этапа швартовки (2) или (3),
2) из приемника СНС-1 поступают сигналы:
а) текущего путевого угла COG,
б) текущих координат судна Фi, λi,
в) текущей скорости хода судна V.
3) Из датчика руля - 4 поступает сигнал текущего значения руля 6.
4) Из датчика угловой скорости - 6 поступает сигнал текущей угловой скорости судна ω.
5) Из датчика оборотов - 8 поступает сигнал текущих оборотов гребного винта n.
6) Из датчика тяги - 10 поступает сигнал текущей тяги - Т носовых подруливающих устройств.
7) Из радаров - 9 вводят сигналы Lнос., Lкор. - расстояние от носа и кормы судна до пирса.
5. Управление судном на первом этапе швартовки (от т. А0 до т. Б если выполняется условие (2)).
Формирование сигналов управления рулевым приводом, носовыми подруливающими устройствами и регулятором оборотов гребного винта.
Законы управления, вырабатываемые в вычислителе - 7:
1) рулевым приводом - 2 (см. зависимость (4)),
2) носовым подруливающим устройством - 3 (см. зависимость (5)),
3) регулятором оборотов гребного винта - 11 (см. зависимость (6)). Поступают соответственно на входы рулевого привода - 2, носового подруливающего устройства - 3, регулятора оборотов гребного винта - 11.
6. Формирование сигналов управления в вычислителе - 7 рулевым приводом, носовыми подруливающими устройствами и регулятором оборотов гребных винтов. На втором этапе режима швартовки при переходе судна из точки Б в точку Аконеч. (если выполняется зависимость (3)):
1) управление углом курса ϕ (см. зависимость (4А) закон управления рулевым приводом, см. закон управления (5А) носовым подруливающим устройством).
2) управление скоростью хода судна - V (см. закон управления (6А) регулятором оборотов гребного винта).
3) управление путевым углом COG (см. закон управления (6Б) регулятором оборотов гребного винта)
Сигналы d/dt δ, d/dt Т и d/dt n из вычислителя - 7 поступают с момента времени tm через интервалы времени Δt соответственно на входы рулевого привода - 2, носового подруливающего устройства - 3, регулятора оборотов гребного винта - 11.
Проведенное моделирование системы автоматической швартовки подтвердило работоспособность и эффективность управления с использованием предложенного способа швартовки судна.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ШВАРТОВКИ СУДНА | 2007 |
|
RU2350506C1 |
| Способ и система швартовки судна | 2020 |
|
RU2747521C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА ПО ШИРОТЕ И ДОЛГОТЕ | 2012 |
|
RU2516885C2 |
| СПОСОБ ВЫБОРА ИСПОЛНИТЕЛЬНЫХ СРЕДСТВ В СИСТЕМЕ РАСХОЖДЕНИЯ СУДНА С ВСТРЕЧНЫМ ОБЪЕКТОМ | 2008 |
|
RU2383463C1 |
| УСТРОЙСТВО И СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА ПО РАСПИСАНИЮ | 2013 |
|
RU2525606C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ПОДХОДА СУДНА К ПРИЧАЛУ | 2009 |
|
RU2403169C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2010 |
|
RU2452655C1 |
| НАВИГАЦИОННЫЙ ИСПЫТАТЕЛЬНЫЙ КОМПЛЕКС | 2024 |
|
RU2828932C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2003 |
|
RU2223197C1 |
| УСТРОЙСТВО ДЛЯ СТОЯНКИ СУДОВ В КАМЕРЕ ШЛЮЗА | 2024 |
|
RU2822933C1 |
Изобретение относится к области судовождения, в частности к автоматическому управлению движением судна при швартовке. В способе используют рулевой привод, носовое подруливающее устройство и регулятор оборотов гребного винта судна. Режим швартовки выполняется в два этапа с использованием заданной точки Б окончания первого этапа и начала второго. Сигнал момента вхождения судна в точку Б формируют по равенству длины текущего вектора путевого угла заданному значению. Управление курсом осуществляют по программе с использованием рулевого привода. Управление по путевому углу - с использованием носового подруливающего устройства на первом этапе швартовки в соответствии с заданным сигналом путевого угла, который формируют в зависимости от длины вектора заданного путевого угла, а на втором этапе швартовки используют регулятор оборотов гребного винта судна. На первом этапе используют регулятор оборотов гребного винта для управления скоростью хода судна по программе в функции от длины заданного вектора путевого угла. Достигается формирование автоматического управления движением судна в режиме швартовки. 1 ил.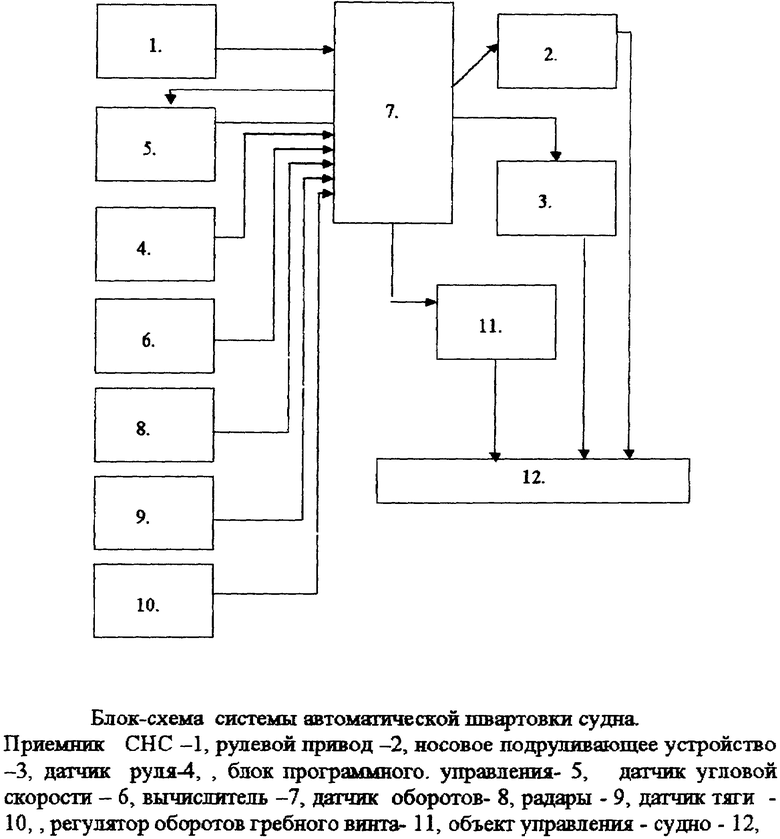
Способ швартовки судна с использованием приемника спутниковой навигационной системы (СНС), рулевого привода, носового подруливающего устройства, датчика руля, датчика тяги, блока программного управления, датчика угловой скорости и вычислителя, в который вводят из приемника СНС сигналы координат судна, скорости хода судна, производной скорости хода судна и путевого угла, из датчика руля - сигнал угла руля, из датчика угловой скорости - сигнал угловой скорости и из датчика тяги-сигнал тяги, отличающийся тем, что дополнительно используют радары и регулятор оборотов гребного винта, вводят в блок программного управления сигналы координат центральной точки швартовки судна и длину вектора путевого угла в точке начала второго этапа швартовки, по сигналам координат судна и сигналам координат центральной точки швартовки судна в вычислителе формируют сигналы заданного путевого угла и длины вектора путевого угла, сигнал длины вектора путевого угла вводят в блок программного управления, где формируют в зависимости от длины вектора путевого угла сигналы программной скорости хода судна, программного курса и разности сигналов длины вектора путевого угла и длины вектора путевого угла точки начала второго этапа швартовки, сравнивают эти сигналы, и если разность сигналов положительна, в вычислителе формируют три сигнала управления первого этапа швартовки, при равенстве нулю или отрицательном значении разности этих сигналов в вычислителе формируют три сигнала управления второго этапа швартовки, формирование в вычислителе трех сигналов управления первого этапа швартовки осуществляют следующим образом: первый сигнал управления рулевым приводом в виде алгебраической суммы сигналов угла курса, угловой скорости, угла руля и программного курса, выработанного в блоке программного управления, подают на вход рулевого привода, второй сигнал управления носовым подруливающим устройством в виде алгебраической суммы сигналов путевого угла, заданного путевого угла, производной путевого угла и тяги подают на вход носового подруливающего устройства, третий сигнал управления регулятором оборотов гребного винта в виде алгебраической суммы сигналов скорости хода судна, ее производной и программной скорости хода судна, выработанной в блоке программного управления, подают на вход регулятора оборотов гребного винта, формирование в вычислителе трех сигналов управления второго этапа швартовки осуществляют следующим образом: сигнал управления рулевым приводом в виде алгебраической суммы сигналов угла курса и программного курса, сформированного в блоке программного управления, подают на вход рулевого привода, причем знак сигнала, подаваемого на вход рулевого привода, изменяют на обратный при заднем ходе судна, сигнал управления носовым подруливающим устройством в виде алгебраической суммы сигналов расстояний до пирса от носового и кормового радара и производной от разности этих сигналов подают на вход носового подруливающего устройства, сигнал управления регулятором оборотов гребного винта формируют либо в виде алгебраической суммы сигналов скорости хода судна и ее производной и программной скорости хода судна, выработанной в блоке программного управления, который затем подают на вход регулятора оборотов гребного винта, если сигнал длины вектора путевого угла больше заданной уставки, либо, если сигнал заданной длины вектора путевого угла меньше уставки, то сигнал управления регулятором оборотов гребного винта формируют в виде алгебраической суммы путевого угла и заданного путевого угла, который затем подают на вход регулятора оборотов гребного винта.
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2003 |
|
RU2240953C1 |
| ВИХРЕВАЯ ПРЯМОТОЧНАЯ ГИДРОТУРБИНА ДЛЯ ИСПОЛЬЗОВАНИЯ ЭНЕРГИИ ТЕЧЕНИЙ РЕК И ПРИЛИВОВ | 2007 |
|
RU2359149C1 |
| US 5983145 А, 09.11.1999. | |||

