Изобретение относится к устройству управления и руления для гусеничного транспортного средства, причем устройство выполнено с возможностью позволения оператору изменять направление перемещения транспортного средства и управлять его продвижением посредством зацепления или расцепления главной муфты транспортного средства. Устройство управления и руления согласно изобретению может быть установлено на гусеничное транспортное средство, такое как сельскохозяйственная машина, например, трактор, строительная машина или промышленная машина.
Изобретение дополнительно относится к гусеничному транспортному средству, содержащему упомянутое выше устройство управления и руления.
Гусеничные транспортные средства обычно содержат двигатель, присоединенный к передаточному устройству посредством главной муфты. Передаточное устройство вращает правый вал и левый вал, присоединенные, соответственно, к правому ведущему колесу и левому ведущему колесу, каждое из которых выполнено с возможностью перемещения соответствующей гусеницы. Тормозные и рулевые муфты связаны с каждым ведущим колесом для того, чтобы позволить оператору рулить в соответствующем направлении. В частности, если оператор хочет повернуть направо вдоль относительно широкой дуги поворота, он просто должен расцепить рулевую муфту, связанную с правой гусеницей. Если вместо этого нужно повернуть направо вдоль относительно узкой дуги, в дополнение к расцеплению правой рулевой муфты оператор должен также воздействовать на тормоз, связанный с правой гусеницей. Подобные операции должны быть осуществлены с левой гусеницей, если требуется повернуть транспортное средство налево.
Известны гусеничные тракторы, в которых руление направо и налево, а также зацепление или расцепление главной муфты могут быть обеспечены посредством воздействия на единственный управляющий рычаг. В частности, оператор может расцепить главную муфту посредством вытягивания управляющего рычага к себе, зацепить главную муфту посредством перемещения управляющего рычага от себя, и рулить направо или налево, соответственно, посредством перемещения управляющего рычага направо или налево.
Тракторы, предусмотренные с управляющим рычагом описанного выше типа, имеют преимущество, заключающееся в сосредоточении множества разных функций на единственном рычаге, что обеспечивает уменьшение количества отдельных элементов управления, с которыми оператор должен взаимодействовать. Тем не менее, для приведения в действие управляющего рычага оператор должен наклонять верхнюю часть своего тела вперед, посредством этого отсоединяя его спину от спинки сиденья трактора, в частности, в случае, когда требуется зацепить главную муфту. Эти перемещения могут вызвать усталость и боль в спине оператора, особенно в случае, когда оператор должен оставаться в тракторе много часов подряд, в течение которых он часто воздействует на управляющий рычаг.
К тому же, когда оператор отсоединяет свою спину от спинки сиденья, чтобы привести в действие управляющий рычаг, верхняя часть тела оператора не имеет неподвижной точки опоры, что может ухудшить безопасность оператора, особенно в случае, если трактор работает на местности со значительным уклоном.
Целью изобретения является улучшение устройств управления транспортным средством, в частности, для гусеничных транспортных средств.
Дополнительной целью является разработка управляющего устройства, которое уменьшает физическую усталость и боль в спине оператора.
Дополнительной целью является разработка управляющего устройства, которое может быть приведено в действие в условиях улучшенной безопасности оператора.
Согласно изобретению, разработано управляющее устройство для гусеничного транспортного средства, содержащее управляющий рычаг, выполненный с возможностью приведения в действие оператором вокруг точки опоры и имеющий свободный конец, причем управляющий рычаг выполнен с возможностью смещения вдоль продольного направления транспортного средства между ближним положением ближе к оператору и дальним положением дальше от оператора для управления главной муфтой транспортного средства, причем управляющее устройство дополнительно содержит поддерживающий элемент, выполненный с возможностью быть прикрепленным к корпусу транспортного средства для поддерживания руки оператора, когда рука воздействует на управляющий рычаг, отличающееся тем, что управляющий рычаг имеет промежуточную часть, расположенную между свободным концом и точкой опоры, причем промежуточная часть имеет такую форму, чтобы частично охватывать поддерживающий элемент в ближнем положении.
В ближнем положении промежуточная фасонная часть позволяет перемещать управляющий рычаг ближе к поддерживающему элементу, по сравнению с прямым управляющим рычагом. Следовательно, для данного хода, расстояние между управляющим рычагом и поддерживающим элементом может быть уменьшено также в дальнем положении. Таким образом, даже в дальнем положении оператор может воздействовать на управляющий рычаг пальцами одной руки, пока в это же время его запястье или ладонь этой же руки опираются на поддерживающий элемент.
Это позволяет ограничивать перемещения спины оператора и уменьшает частоту, с которой оператор вынужден отсоединять свою спину от спинки сиденья. Таким образом, уменьшается физическая усталость и, следовательно, риск боли в спине оператора.
К тому же, поскольку запястье или ладонь удерживаются опертыми на поддерживающий элемент, даже когда управляющий рычаг находится в дальнем положении, оператор находит в поддерживающем элементе устойчивую точку опоры, даже когда транспортное средство работает на местности, имеющей крутой уклон. Это увеличивает безопасность оператора.
В варианте осуществления, управляющий рычаг выполнен с возможностью дополнительного качания в поперечном направлении транспортного средства для руления направо и налево. Дугообразная опорная зона выступает из центральной области поддерживающего элемента; рука оператора может перемещаться вдоль этой опорной зоны, когда управляющий рычаг перемещается в поперечном направлении.
Дугообразная опорная зона позволяет сохранять расстояние между поддерживающим элементом и свободным концом управляющего рычага, по существу, неизменным, когда управляющий рычаг перемещается в поперечном направлении, то есть, перпендикулярно продольному направлению. Таким образом, запястье или ладонь оператора могут удерживаться опертыми на дугообразную опорную зону даже тогда, когда пальцы этой руки перемещаются вдоль поперечного направления для смещения управляющего рычага, соответственно.
Таким образом, могут быть дополнительно улучшены комфорт и безопасность оператора.
Изобретение будет лучше понято и осуществлено со ссылкой на прилагаемые чертежи, на которых проиллюстрирован, в качестве неограничивающего примера, вариант осуществления изобретения, и на которых:
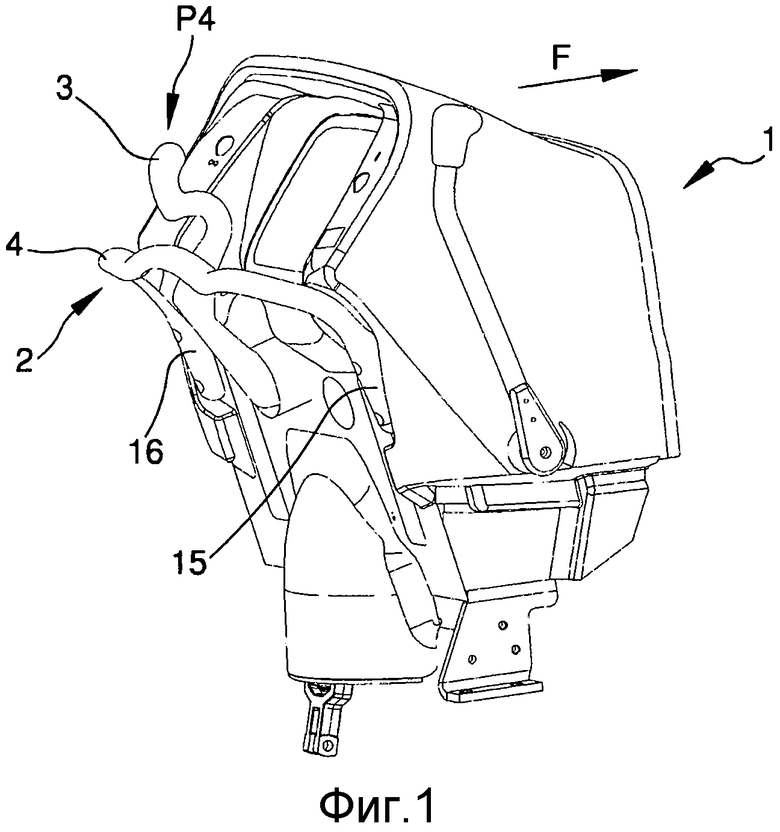
фиг.1 представляет собой вид в перспективе, на котором показана часть транспортного средства, содержащего устройство управления и руления;
фиг.2 представляет собой увеличенный вид сбоку, на котором показан управляющий рычаг устройства управления и руления с фиг.1;
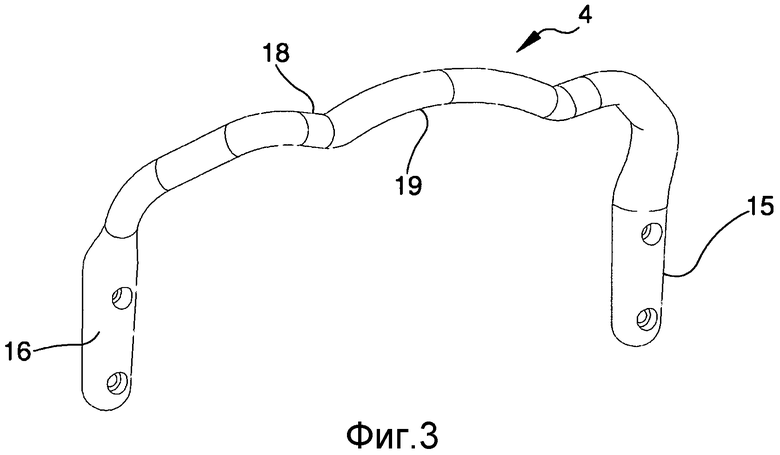
фиг.3 представляет собой увеличенный вид в перспективе, на котором показан поддерживающий элемент устройства управления и руления с фиг.1;
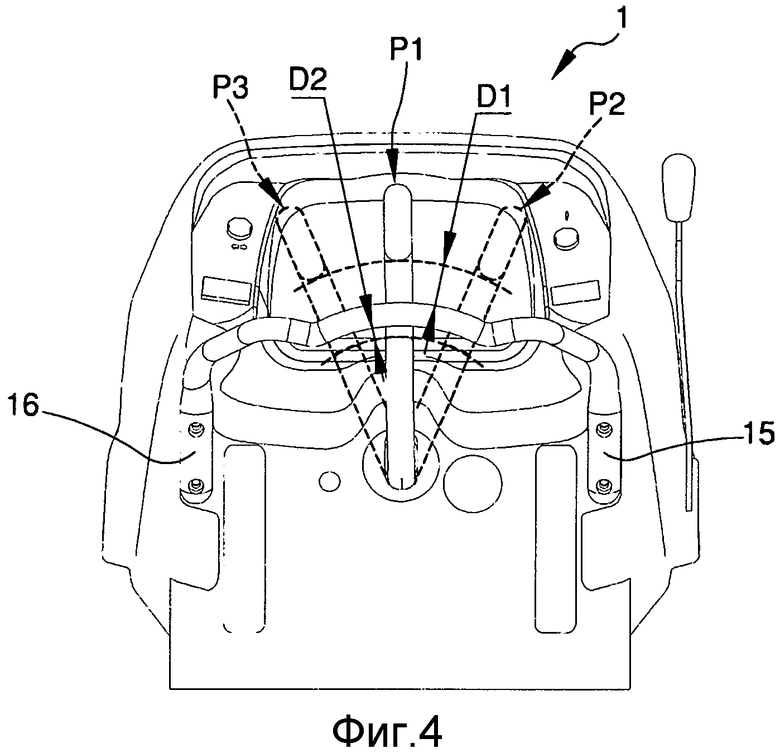
фиг.4 представляет собой вид спереди устройства управления и руления с фиг.1, на котором показано центральное положение, положение, наклоненное направо, и положение, наклоненное налево, управляющего рычага;
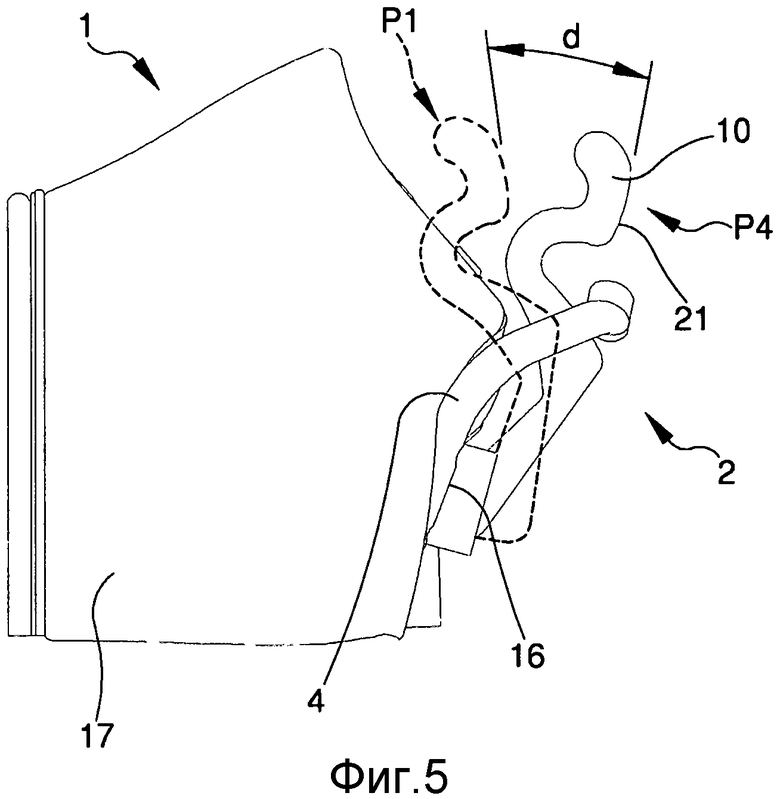
фиг.5 представляет собой вид как на фиг.1, на котором показано дальнее положение и промежуточное положение управляющего рычага;
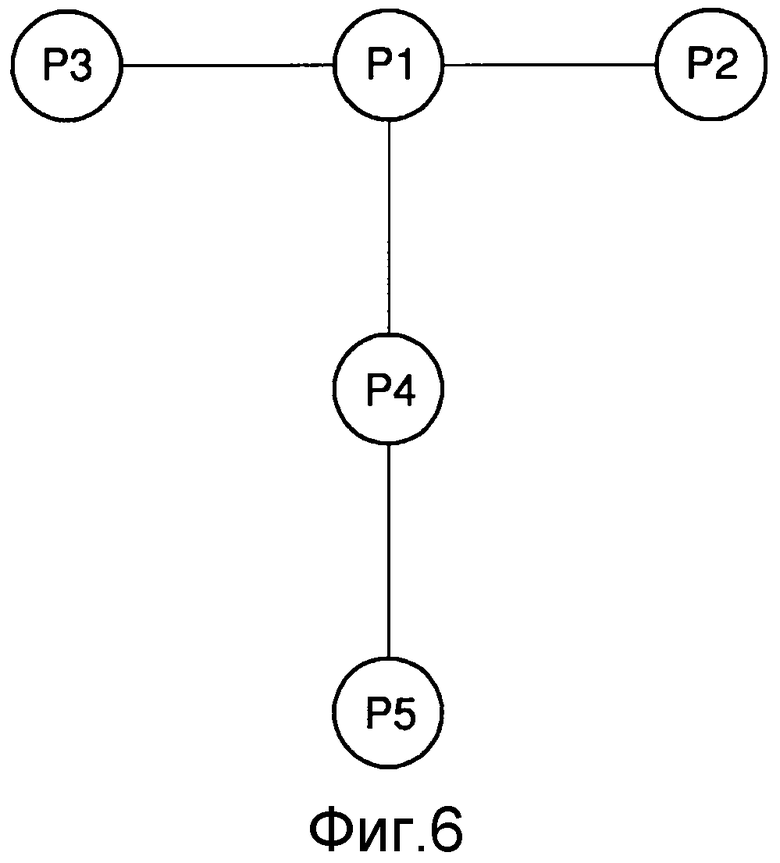
фиг.6 представляет собой диаграмму, на которой показаны основные положения управляющего рычага.
На фиг.1 показана консоль 1 управления гусеничного транспортного средства, в частности, сельскохозяйственной машины, такой как трактор, или строительная машина или промышленная машина. Консоль 1 управления расположена спереди сиденья оператора, относительно направления F продвижения гусеничного транспортного средства, так, чтобы позволить оператору приводить в действие органы управления, необходимые для вождения транспортного средства, в то время как оператор смотрит вперед.
Консоль 1 управления содержит устройство 2 управления и руления, выполненное с возможностью управления продвижением гусеничного транспортного средства посредством зацепления или расцепления главной муфты, и для руления направо или налево. Устройство 2 управления и руления содержит управляющий рычаг 3, который оператор может перемещать рукой, и поддерживающий элемент 4, выполненный с возможностью прикрепления к корпусу транспортного средства так, чтобы быть расположенным между управляющим рычагом 3 и сиденьем.
Поддерживающий элемент 4 выполнен с возможностью поддерживания руки оператора, когда она воздействует на управляющий рычаг 3. Для этого поддерживающий элемент 4 выполнен так, что оператор может опираться его запястьем или ладонью на поддерживающий элемент 4, пока он перемещает управляющий рычаг 3 пальцами этой же руки.
Управляющий рычаг 3 присоединен к приводной системе, которая не проиллюстрирована, причем приводная система позволяет зацеплять и расцеплять главную муфту, и дополнительно воздействует на рулевую муфту и возможно также на тормоз, связанные с правой гусеницей или левой гусеницей, так, чтобы рулить, соответственно, направо или налево. Упомянутая выше приводная система может быть гидравлического, механического или другого типа, и она далее не описана подробно, так как является известной. Пример приводной системы, выполненной с возможностью присоединения к управляющему рычагу 3, раскрыт в Европейской заявке на патент EP 2045169, зарегистрированной на имя того же заявителя, что и настоящая заявка на патент.
В частности, для того, чтобы зацепить или расцепить главную муфту, управляющий рычаг 3 смещается вдоль продольного направления гусеничного транспортного средства, то есть, параллельно направлению F продвижения. Таким образом, управляющий рычаг 3 может быть перемещен между ближним положением P5, показанным на фиг.2 и 6, в котором управляющий рычаг 3 расположен ближе к телу оператора, и дальним положением P1, в котором управляющий рычаг 3 расположен дальше от тела оператора.
Управляющий рычаг 3 также может быть перемещен поперечно, в частности перпендикулярно, продольному направлению гусеничного транспортного средства для того, чтобы воздействовать на рулевую муфту и/или тормоз, связанные с правой или левой гусеницей, чтобы обладать возможностью руления, соответственно, направо или налево.
Все описанные выше перемещения управляющего рычага 3 могут быть осуществлены одной рукой. Другая рука оператора, следовательно, свободна для приведения в действие других органов управления, например, относящихся к инструментам, находящимся на гусеничном транспортном средстве.
На фиг.2 подробно показан управляющий рычаг 3, который содержит свободный конец 5 и крепежный конец 6, напротив свободного конца 5, шарнирно присоединенный к раме транспортного средства в точке H опоры.
Промежуточная часть 7 расположена между свободным концом 5 и крепежным концом 6, причем промежуточная часть 7 имеет такую форму, что когда управляющий рычаг 3 находится в ближнем положении P5, то есть, в положении, ближайшем к телу оператора и, таким образом, к поддерживающему элементу 4, промежуточная часть 7 частично охватывает поддерживающий элемент 4, то есть, она расположена вокруг части поддерживающего элемента 4.
Для этого управляющий рычаг 3 простирается вдоль продольной оси L, которая не является прямой, как в традиционных рычагах, но которая, у промежуточной части 7, имеет изогнутую геометрию с вогнутостью, направленной к поддерживающему элементу 4.
Таким образом, промежуточная часть 7 образует изгиб в управляющем рычаге 3, например, C-образный изгиб. Вовнутрь этого изгиба может быть принята секция поддерживающего элемента 4, когда управляющий рычаг 3 находится в ближайшем к оператору положении, как схематично показано на фиг.2.
Управляющий рычаг 3 дополнительно содержит модулирующую часть 10, расположенную между промежуточной частью 7 и свободным концом 5. Как будет более ясно из дальнейшего описания, посредством воздействия на модулирующую часть 10 оператор может модулировать положение главной муфты так, чтобы вызываь ее управляемое "проскальзывание". Модулирующая часть 10 может иметь, по существу, прямую форму.
Свободный конец 5 загнут вперед относительно модулирующей части 10, то есть, он наклонен так, чтобы быть направленным к стороне, противоположной поддерживающему элементу 4. Свободный конец 5 ограничен передней рабочей поверхностью 8, направленной вперед относительно направления F продвижения транспортного средства, и задней рабочей поверхностью 9, противоположной передней рабочей поверхности 8. Как будет понятнее ниже в этом документе, эта форма свободного конца 5 позволяет быстро зацеплять и расцеплять главную муфту гусеничного транспортного средства.
Промежуточная часть 7 содержит верхнюю ветвь 11 и нижнюю ветвь 12, между которыми образована вогнутость, которая выполнена с возможностью принятия секции поддерживающего элемента 4. Нижняя ветвь 12 длиннее, чем верхняя ветвь 11. В ближнем положении P5, как показано на фиг.2, верхняя ветвь 11 расположена над поддерживающим элементом 4, тогда как нижняя ветвь 12 расположена под поддерживающим элементом 4.
Вдоль нижней ветви 12, продольная ось L управляющего рычага 3 имеет форму, приблизительно, как дуга круга с центром в точке H опоры. Как будет лучше объяснено ниже в этом документе, эта геометрия позволяет оператору легче смещать управляющий рычаг 3 направо или налево, даже когда управляющий рычаг 3 находится в дальнем положении P1.
Управляющий рычаг 3 может дополнительно содержать соединительную часть 13, которая из промежуточной части 7 простирается вниз, и, возможно, начальную часть 14, расположенную между соединительной частью 13 и точкой H опоры.
В соединительной части 13 и в начальной части 14 продольная ось L управляющего рычага 3 сможет простираться вдоль соответствующих прямых сегментов, имеющих разные наклоны друг к другу.
На фиг.3 показан поддерживающий элемент 4, выполненный с возможностью использования в комбинации с управляющим рычагом 3.
Поддерживающий элемент 4 содержит правое крепежное ответвление 15 и левое крепежное ответвление 16, выполненные с возможностью прикрепления поддерживающего элемента 4 к корпусу гусеничного транспортного средства, например, посредством удаляемого крепежного средства, такого как резьбовые элементы. Как показано на фиг.1 и 5, в проиллюстрированном примере правое крепежное ответвление 15 и левое крепежное ответвление 16 прикреплены к коробчатому кожуху 17, который ограничивает снаружи консоль 1 управления.
Правое крепежное ответвление 15 и левое крепежное ответвление 16, прикрепленные к телу транспортного средства, расположены, по существу, в вертикальном положении.
Во время использования правое крепежное ответвление 15 и левое крепежное ответвление 16 расположены, соответственно, вблизи от правой ноги и левой ноги оператора.
Поддерживающий элемент 4 дополнительно содержит поручень 18, расположенный между правым крепежным ответвлением 15 и левым крепежным ответвлением 16 так, чтобы быть на расстоянии от коробчатого кожуха 17. Поручень 18 простирается преимущественно поперечно относительно направления F продвижения, то есть, относительно продольного направления гусеничного транспортного средства.
Поручень 18 содержит центральную область, выполненную с возможностью быть опорой для запястья или ладони оператора, пока пальцы той же руки смещают управляющий рычаг 3. Следовательно, центральная область образует в поручне 18 опорную зону 19 для руки оператора. Опорная зона 19 является дугообразной, например, выполненной в форме дуги окружности.
Опорная зона 19 выступает вверх из поручня 18. Иначе говоря, опорная зона 19 образует в поручне 18 вогнутую зону, имеющую вогнутость, направленную вниз, то есть, к ногам оператора.
Как будет более понятно ниже в этом документе, благодаря форме опорной зоны 19, в положении дальше от тела оператора управляющий рычаг 3 может быть смещен вправо и влево вокруг точки H опоры без значительного изменения расстояния между свободным концом 5 и опорной зоной 19.
Поддерживающий элемент 4 может иметь симметричную конфигурацию относительно центральной вертикальной плоскости гусеничного транспортного средства.
Как показано на фиг.2, опорная зона 19 имеет поперечное сечение, которое является сплющенным, в частности, эллиптическим. Поперечное сечение опорной зоны 19 преимущественно простирается вдоль горизонтального направления, или вдоль не сильно наклоненного направления, в частности наклоненного меньше чем на 45°, относительно горизонтального направления. Эта форма поперечного сечения обеспечивает уменьшение размера поручня 18 поперечно основному размеру поперечного сечения, и также обеспечивает увеличение верхней поверхности опорной зоны 19, которая доступна для руки оператора. Таким образом, рука оператора может стабильно опираться на опорную зону 19.
Во время работы гусеничного транспортного средства согласно проиллюстрированному примеру, дальнее положение P1 управляющего рычага 3, то есть, положение, в котором управляющий рычаг 3 находится дальше от тела оператора, соответствует конфигурации, в которой главная муфта гусеничного транспортного средства зацеплена. Гусеничное транспортное средств, таким образом, продвигается с условиями продвижения, такими как скорость, передаточное число коробки передач и так далее, которые выбираются оператором с использованием органов управления, которые не проиллюстрированы.
Если, в частности, когда главная муфта зацеплена, управляющий рычаг 3 сохраняется в дальнем положении P1, показанном на фиг.6, то есть, вдоль центральной вертикальной плоскости гусеничного транспортного средства, гусеничное транспортное средство продвигается прямо вдоль направления F продвижения.
Если, с другой стороны, когда главная муфта зацеплена, управляющий рычаг 3 наклонен вправо вокруг точки H опоры, таким образом, достигая правого дальнего положения P2, обозначенного на фиг.4 и 6, гусеничное транспортное средство поворачивает направо.
Подобным образом, посредством наклона управляющего рычага 3 влево, до достижения левого дальнего положения P3, показанного на фиг.4 и 6, гусеничное транспортное средство может быть повернуто налево.
Управляющий рычаг 3 может дополнительно принимать промежуточное положение P4, расположенное между дальним положением P1 и ближним положением P5, как показано на фиг.1 и 6. В проиллюстрированном примере, промежуточное положение P4 может быть образовано как устойчивое нейтральное положение, в котором главная муфта расцеплена. Гусеничное транспортное средство, следовательно, неподвижно.
С использованием возвратного средства, которое не проиллюстрировано, возможно обеспечить автоматический возврат управляющего рычага 3 в устойчивое нейтральное положение P4, если управляющий рычаг 3 отпущен в любом положении, расположенном между дальним положением P1 и устойчивым нейтральным положением P4.
Ближнее положение P5 управляющего рычага 3 соответствует конфигурации, в которой зубчатый механизм коробки передач транспортного средства заторможен для легкого включения передачи. Это происходит потому, что при смещении управляющего рычага 3 из устойчивого нейтрального положения P4 к ближнему положению P5 приводится в действие трансмиссионный тормоз. Трансмиссионный тормоз является механизмом известного типа, не проиллюстрированном на чертежах, который позволяет затормаживать зубчатый механизм коробки передач транспортного средства, чтобы оператор мог включать передачи плавно, то есть, без удара.
Возвратное средство обеспечивает автоматическое достижение управляющим рычагом 3 устойчивого нейтрального положения P4, если управляющий рычаг 3 отпускается в ближнем положении P5, или в любом положении, расположенном между устойчивым нейтральным положением P4 и ближним положением P5.
Если, начиная с дальнего положения P1, в котором главная муфта зацеплена, оператор хочет переключить передачу, он должен осуществить последовательность действий, которая описана ниже. Прежде всего, оператор тянет управляющий рычаг 3 к своему телу вдоль продольного направления, посредством вращения управляющего рычага 3 вокруг его точки H опоры. Приводная система, приводимая в действие управляющим рычагом 3, после этого смещает вал, поддерживающий диск главной муфты, и расцепляет главную муфту. Таким образом, достигается устойчивое нейтральное положение P4.
После этого, оператор тянет далее управляющий рычаг 3 к себе, посредством этого перемещая дальше вал, поддерживающий диск главной муфты, для приведения в действие трансмиссионного тормоза. Таким образом, достигается ближнее положение P5, и зубчатый механизм коробки передач транспортного средства останавливается.
После остановки зубчатого механизма посредством трансмиссионного тормоза оператор может отпустить управляющий рычаг 3, который автоматически приводится обратно в устойчивое нейтральное положение P4 с помощью возвратного средства. В этот момент оператор может переключить передачу посредством использования рычага, который не показан.
После этого, оператор толкает управляющий рычаг 3 к дальнему положению P1, чтобы приводная система повторно зацепила главную муфту.
Управляющий рычаг 3 может быть перемещен влево или вправо в дальнем положении P1, в ближнем положении P5 или в любом положении, расположенном между ними. Таким образом, оператор может воздействовать на рулевые муфты и возможно на соответствующие тормоза, чтобы рулить транспортным средством даже при переключении передач.
Управляющий рычаг 3 и поддерживающий элемент 4 имеют эргономичную форму, которая позволяет оператору особенно легко смещать управляющий рычаг 3 между множеством описанных выше рабочих положений.
В частности, благодаря промежуточной части 7 управляющего рычага 3, которая в ближнем положении P5 охватывает поперечное сечение поручня 18 вдоль части его периметра, возможно перемещать управляющий рычаг 3 ближе к поручню 18 в ближнем положении P5, относительно случая рычага, имеющего прямую геометрию. Вогнутость, образованная промежуточной частью 7, предотвращает ударение управляющего рычага 3 в поручень 18, когда трансмиссионный тормоз полностью приведен в действие. Благодаря промежуточной части 7, в ближнем положении P5 свободный конец 5 управляющего рычага 3 может быть совмещен с поручнем 18, или даже расположен за поручнем 18 относительно направления F продвижения.
Посредством сведения к минимуму расстояния между управляющим рычагом 3 и поручнем 18 в ближнем положении P5 также возможно, для определенного хода управляющего рычага 3, уменьшить расстояние между управляющим рычагом 3 и поручнем 18 в дальнем положении P1.
Также уменьшено расстояние d, показанное на фиг.5, между активной поверхностью 21 модулирующей части 10 в дальнем положении P1 и в устойчивом нейтральном положении P4. Это расстояние соответствует реальному расстоянию перемещения пальца оператора, в частности, большого пальца, при смещении управляющего рычага 3 из устойчивого нейтрального положения P4 к дальнему положению P1, например, при модулировании главной муфты.
В варианте осуществления расстояние d может быть меньше чем 10 см, предпочтительно 8 см или меньше.
Следовательно, оператор может смещать управляющий рычаг 3 вдоль продольного направления транспортного средства, то есть, из ближнего положения P5 к дальнему положению P1 и наоборот, без отсоединения запястья или ладони от опорной зоны 19 поручня 18 и без наклонения верхней части тела вперед. Это обеспечивает увеличение устойчивости и, таким образом, безопасности оператора, сидящего в гусеничном транспортном средстве.
К тому же оператору легко смещать управляющий рычаг 3, когда управляющий рычаг 3 находится в дальнем положении P1, например, посредством перемещения его между дальним положением P1 и правым дальним положением P2 или между дальним положением P1 и левым дальним положением P3.
Точки управляющего рычага 3 перемещаются примерно вдоль дуги окружности, когда управляющий рычаг 3 смещается между дальним положением P1 и правым дальним положением P2 или между дальним положением P1 и левым дальним положением P3. Поскольку опорная зона 19 поручня 18 также является дугообразной, расстояние между управляющим рычагом 3 и опорной зоной 19 поручня 18, по существу, не меняется, пока управляющий рычаг 3 перемещается перпендикулярно продольному направлению.
Это ясно показано на фиг.4, на которой расстояние между опорной зоной 19 и самой нижней частью модулирующей части 10 обозначено D1. Это расстояние остается, по существу, постоянным, пока оператор перемещает управляющий рычаг 3 вправо или влево.
Следовательно, когда оператор перемещает управляющий рычаг 3 перпендикулярно продольному направлению транспортного средства пальцами одной руки, запястье или ладонь этой руки могут перемещаться вдоль опорной зоны 19 поручня 18 без отсоединения от нее.
Таким образом, поручень 18 обеспечивает устойчивую точку опоры для запястья или ладони руки оператора, пока пальцы этой руки смещают управляющий рычаг 3 влево или вправо для руления, посредством захватывания нижней ветви 12 фасонной части 7 у захватной части 20, показанной на фиг.2. Захватная часть 20 может быть захвачена между большим пальцем и указательным пальцем оператора, или указательным и средним пальцами. Как показано на фиг.4, расстояние D2 между нижней поверхностью опорной зоны 19 и захватной частью 20 также остается, по существу, постоянным, когда управляющий рычаг 3 наклоняется влево или вправо начиная от дальнего положения P1.
Если оператор желает быстро перейти из устойчивого нейтрального положения P4 к дальнему положению P1, в котором гусеничное транспортное средство перемещается прямо вперед, достаточно толкнуть вперед, используя пальцы, заднюю рабочую поверхность 9 свободного конца 5. Таким образом, оператор удаляет управляющим рычагом 3 от себя до зацепления главной муфты. В этот раз также нет необходимости в отсоединении руки от поручня 18.
Для расцепления главной муфты оператор может, наоборот, потянуть управляющий рычаг 3 на себя посредством воздействия на переднюю рабочую поверхность 8 свободного конца 5. Таким образом, управляющий рычаг 3 может быть смещен из дальнего положения P1 в устойчивое нейтральное положение P4. Форма свободного конца 5, ограниченная передней рабочей поверхностью 8 и задней рабочей поверхностью 9, позволяет легче быстро смещать управляющий рычаг 3 из дальнего положения P1 к устойчивому нейтральному положению P4 в аварийных случаях. Таким образом, главная муфта может быть легко расцеплена для остановки транспортного средства.
Начиная с устойчивого нейтрального положения P4, оператор также может захотеть модулировать главную муфту, чтобы гусеничное транспортное средство перемещалось медленно и точно вдоль направления F продвижения, например, для прикрепления к инструменту.
В этом случае оператор может захватить модулирующую часть 10 управляющего рычага 3 между большим пальцем и указательным пальцем и сместить управляющий рычаг 3 немного вперед или назад для зацепления или, в качестве альтернативы, расцепления главной муфты. Таким образом, осуществляется что-то типа управляемого проскальзывания муфты, что позволяет смещать гусеничное транспортное средство на небольшие величины.
Из описанного выше ясно, что форма управляющего рычага 3 обеспечивает смещение управляющего рычага 3 между разными рабочими положениями только одной рукой, безопасно и без чрезмерной усталости оператора, который может опирать свою руку на поддерживающий элемент 4 без непрерывного смещения его спины вперед и назад.
Наконец, следует заметить, что управляющий рычаг 3 описанного выше типа, то есть, предусмотренный с частью такой формы, чтобы частично окружать поддерживающий элемент 4, также может быть использован в управляющем устройстве, которое обеспечивает зацепление или расцепление главной муфты, но, тем не менее, не содержит функции руления, то есть, в управляющем устройстве, в котором управляющий рычаг 3 подвижен только в продольном направлении транспортного средства.
| название | год | авторы | номер документа |
|---|---|---|---|
| УПРАВЛЯЮЩЕЕ УСТРОЙСТВО ДЛЯ ГУСЕНИЧНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2573136C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2562929C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРИВЕДЕНИЕМ В ДВИЖЕНИЕ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2557132C1 |
| СПОСОБ И УСТРОЙСТВО ОБНАРУЖЕНИЯ МЕСТ ДЛЯ ПАРКОВКИ | 2015 |
|
RU2700635C1 |
| УСТАНОВКА И СПОСОБ ДЛЯ ГРУНТОВАНИЯ ТРУБОПРОВОДА | 1994 |
|
RU2119997C1 |
| Инженерная луномашина и способ её эксплуатации | 2021 |
|
RU2770387C1 |
| УПРАВЛЯЮЩЕЕ УСТРОЙСТВО РУЛЕНИЯ | 2021 |
|
RU2754282C1 |
| МЕХАНИЗМ УПРАВЛЕНИЯ БОРТОВЫМ ПОВОРОТОМ И ТОРМОЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2050297C1 |
| УСТРОЙСТВО ДЛЯ СОЗДАНИЯ ГРУНТОВОЙ ПОДУШКИ ТРУБОПРОВОДА | 1989 |
|
RU2044119C1 |
| МУФТА ДЛЯ РЕМОНТА ПОДВОДНОГО ТРУБОПРОВОДА | 2004 |
|
RU2287105C2 |
Изобретение относится к средствам управления для ручного приведения в действие. Предложено управляющее устройство для гусеничного транспортного средства, содержащее управляющий рычаг (3), выполненный с возможностью приведения в действие оператором вокруг точки (H) опоры и имеющий свободный конец (5). Причем управляющий рычаг (3) выполнен с возможностью смещения вдоль продольного направления транспортного средства между ближним положением (P5) ближе к оператору и дальним положением (P1) дальше от оператора для управления главной муфтой транспортного средства. Кроме того, управляющее устройство (2) дополнительно содержит поддерживающий элемент (4), выполненный с возможностью крепления к телу транспортного средства для поддерживания руки оператора, когда рука воздействует на управляющий рычаг (3). При этом управляющий рычаг (3) имеет промежуточную часть (7), расположенную между свободным концом (5) и точкой (H) опоры, и имеющую такую форму, чтобы частично охватывать поддерживающий элемент (4) в ближнем положении (P5). Предложенное устройство обеспечивает комфорт и безопасность оператору при управлении гусеничным транспортным средством. 2 н. и 12 з.п. ф-лы, 6 ил.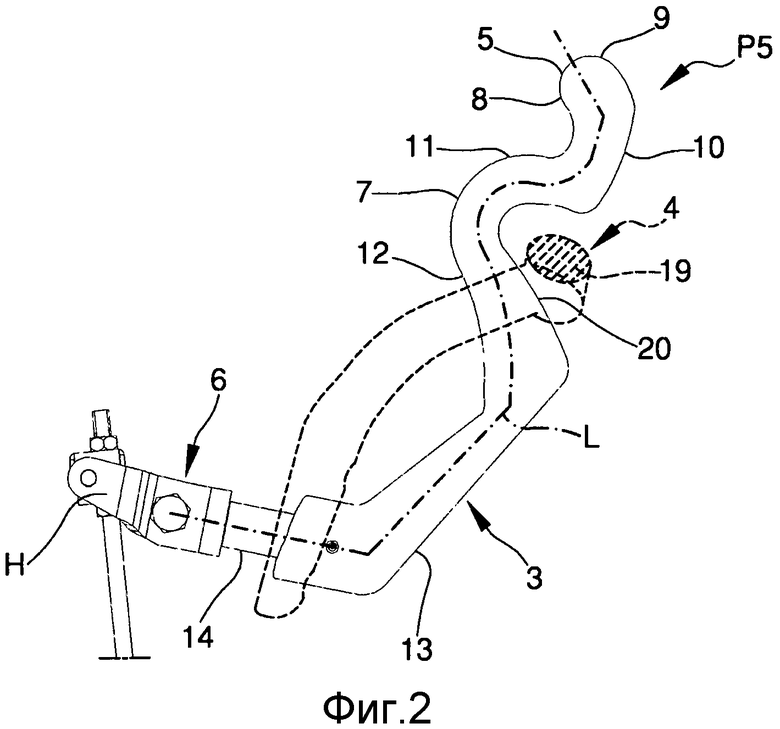
1. Управляющее устройство для гусеничного транспортного средства, содержащее управляющий рычаг (3), выполненный с возможностью приведения в действие оператором вокруг точки (H) опоры и имеющий свободный конец (5), причем управляющий рычаг (3) выполнен с возможностью смещения вдоль продольного направления транспортного средства между ближним положением (P5) ближе к оператору и дальним положением (P1) дальше от оператора для управления главной муфтой транспортного средства, причем управляющее устройство (2) дополнительно содержит поддерживающий элемент (4), выполненный с возможностью быть прикрепленным к корпусу транспортного средства для поддерживания руки оператора, когда рука воздействует на управляющий рычаг (3), отличающееся тем, что управляющий рычаг (3) имеет промежуточную часть (7), расположенную между свободным концом (5) и точкой (H) опоры, причем промежуточная часть (7) имеет такую форму, чтобы частично охватывать поддерживающий элемент (4) в ближнем положении (P5).
2. Управляющее устройство по п.1, в котором управляющий рычаг (3) выполнен с возможностью дополнительного смещения поперечно продольному направлению для руления транспортным средством, причем поддерживающий элемент (4) имеет центральную область, из которой выступает дугообразная опорная зона (19), так что рука оператора может оставаться в соприкосновении с опорной зоной (19), пока пальцы упомянутой руки смещают управляющий рычаг (3) поперечно продольному направлению.
3. Управляющее устройство по п.2, в котором у опорной зоны (19) поддерживающий элемент (4) имеет приблизительно эллиптическое поперечное сечение, причем упомянутое поперечное сечение имеет основную ось, наклоненную под углом меньше чем 45°, относительно горизонтального направления.
4. Управляющее устройство по п.2, в котором поддерживающий элемент (4) содержит правое крепежное ответвление (15) и левое крепежное ответвление (16), которые простираются, по существу, в вертикальных направлениях, чтобы быть прикрепленными к противоположным периферийным зонам корпуса транспортного средства, причем поручень (18) расположен между правым крепежным ответвлением (15) и левым крепежным ответвлением (16), причем опорная зона (19) выступает вверх из поручня (18).
5. Управляющее устройство по п.3, в котором поддерживающий элемент (4) содержит правое крепежное ответвление (15) и левое крепежное ответвление (16), которые простираются, по существу, в вертикальных направлениях, чтобы быть прикрепленными к противоположным периферийным зонам корпуса транспортного средства, причем поручень (18) расположен между правым крепежным ответвлением (15) и левым крепежным ответвлением (16), причем опорная зона (19) выступает вверх из поручня (18).
6. Управляющее устройство по любому из предшествующих пунктов, в котором управляющий рычаг (3) простирается вдоль продольной оси (L), которая, в упомянутой промежуточной части (7), имеет изогнутую геометрию с вогнутостью, направленной к поддерживающему элементу (4).
7. Управляющее устройство по п.1, в котором упомянутая промежуточная часть (7) содержит нижнюю ветвь (12) и верхнюю ветвь (11), которые соединяются друг с другом так, чтобы образовывать изгиб, выполненный с возможностью частичного окружения секции поддерживающего элемента (4) в ближнем положении (P5).
8. Управляющее устройство по п.7, в котором упомянутая нижняя ветвь (12) простирается вдоль дуги окружности с центром в упомянутой точке (H) опоры.
9. Управляющее устройство по п.1, в котором модулирующая часть (10) расположена между свободным концом (5) и промежуточной частью (7) управляющего рычага (3), причем модулирующая часть (10) выполнена с возможностью приведения в действие для осуществления управляемого проскальзывания главной муфты, причем модулирующая часть (10) простирается, предпочтительно, вдоль, по существу, прямой линии.
10. Управляющее устройство по п.9, в котором свободный конец (5) управляющего рычага (3) наклонен в направлении вперед относительно модулирующей части (10).
11. Управляющее устройство по п.1, в котором упомянутое дальнее положение (P1) соответствует конфигурации, в которой главная муфта зацеплена.
12. Управляющее устройство по п.1, в котором упомянутое ближнее положение (P5) соответствует конфигурации, в которой зубчатый механизм коробки передач транспортного средства заторможен для простого включения передач.
13. Управляющее устройство по п.1, в котором устойчивое нейтральное промежуточное положение (P4) предусмотрено между упомянутым ближним положением (P5) и упомянутым дальним положением (P1), причем предусмотрено возвратное средство для возвращения управляющего рычага (3) в устойчивое нейтральное промежуточное положение (P4), когда управляющий рычаг (3) отпущен в упомянутом ближнем положении (P5) или в положении, расположенном между упомянутым ближним положением (P5) и упомянутым дальним положением (P1).
14. Гусеничное транспортное средство, содержащее управляющее устройство по п.1.
| EP 0813993 A2, 29.12.1997 | |||
| Устройство управления | 1978 |
|
SU933002A3 |
| УСТРОЙСТВО УПРАВЛЕНИЯ | 2001 |
|
RU2295747C2 |
| Устройство для узла управления транспортным средством с неповоротными колесами | 1986 |
|
SU1558298A3 |
| Способ химического удаления и предохранения поверхности нагрева котельных установок от нагара и шлаковых отложений | 1948 |
|
SU86523A2 |
| Способ производства сычужного сыра в виде слайсов | 2021 |
|
RU2770468C1 |

