Изобретение относится к гидроакустической технике, конкретнее к области активной гидролокации, в том числе к активным гидролокаторам, предназначенным для обнаружения объектов, измерения координат и параметров движения обнаруженных объектов.
Известен активный гидролокатор (патент РФ №2346295), содержащий акустические излучающую и приемную антенны, устройство формирования зондирующего сигнала, генераторное устройство, устройство управления, устройство формирования характеристик направленности, блок измерения времени задержки эхо-сигнала относительно момента излучения зондирующего сигнала, блок измерения угла прихода эхо-сигнала в вертикальной плоскости, блок измерения глубины цели.
Известен активный гидролокатор (патент РФ №2408897), содержащий последовательно соединенные устройство синхронизации, устройство формирования зондирующего сигнала, генераторное устройство и излучающую акустическую антенну, последовательно соединенные приемную акустическую антенну, устройство формирования характеристик направленности, устройство согласованной фильтрации, устройство обнаружения эхо-сигнала, устройство определения угла прихода эхо-сигнала.
Однако в этих гидролокаторах отсутствует устройство определения дистанции до цели.
По количеству общих признаков наиболее близким аналогом предлагаемого изобретения является активный гидролокатор, содержащий последовательно соединенные устройство синхронизации, устройство формирования сложного зондирующего сигнала, генераторное устройство и излучающую акустическую антенну, также содержащий последовательно соединенные приемную акустическую антенну, устройство формирования характеристики направленности, первый согласованный фильтр, устройство обнаружения эхо-сигнала, при этом второй выход устройства формирования сложного зондирующего сигнала соединен со вторым входом первого согласованного фильтра, также содержащий устройство определения дистанции до цели (Митько В.Б., Евтютов А.П., Гущин С.Е. Гидроакустические средства связи и наблюдения. Л.: Судостроение, 1982. С.122-127, 138-142).
Недостатком данного гидролокатора-прототипа является то, что нет возможности излучения сложного сигнала с требуемой шириной полосы ограничены из-за недостаточной полосы пропускания излучающей акустической антенны. Вследствие этого необходимая точность определения дистанции до цели не достигается. Это связано с тем, что при использовании сложных сигналов величины ошибок определения дистанции тем больше, чем больше длительность отклика на выходе согласованного фильтра, а длительность отклика, в свою очередь, увеличивается при уменьшении ширины полосы сигнала.
Техническим результатом изобретения является повышение точности определения дистанции до цели.
Для достижения данного технического результата в активный гидролокатор, содержащий последовательно соединенные устройство синхронизации, устройство формирования сложного зондирующего сигнала, генераторное устройство и излучающую акустическую антенну, также содержащий последовательно соединенные приемную акустическую антенну, устройство формирования характеристики направленности, первый согласованный фильтр, устройство обнаружения эхо-сигнала, при этом второй выход устройства формирования сложного зондирующего сигнала соединен со вторым входом первого согласованного фильтра, также содержащий устройство определения дистанции до цели, введены новые признаки, а именно: последовательно соединенные запоминающее устройство, устройство выделения сигнального отклика сложного эхо-сигнала, модулятор и второй согласованный фильтр, также введено устройство формирования модулирующей функции вспомогательного сложного сигнала и устройство выработки строба, при этом вход устройства формирования модулирующей функции вспомогательного сложного сигнала соединен с выходом устройства выделения сигнального отклика сложного эхо-сигнала, а первый и второй выходы устройства формирования модулирующей функции вспомогательного сложного сигнала соединены со вторыми входами модулятора и второго согласованного фильтра соответственно, вход устройства выработки строба соединен с выходом устройства обнаружения эхо-сигнала, выход первого согласованного фильтра соединен с первым входом запоминающего устройства, первый, второй и третий выходы устройства выработки строба соединены со вторым входом запоминающего устройства, вторым входом устройства выделения сигнального отклика сложного эхо-сигнала и первым входом устройства определения дистанции до цели соответственно, второй вход которого соединен с выходом второго согласованного фильтра, при этом второй вход устройства обнаружения эхо-сигнала соединен со вторым выходом устройства синхронизации.
Указанный технический результат достигается за счет того, что определение дистанции до цели производится на основе измерения времени задержки отклика на выходе второго согласованного фильтра для специально сформированного вспомогательного сложного сигнала, причем длительность этого отклика значительно меньше длительности отклика на выходе первого согласованного фильтра. Это имеет место по той причине, что вспомогательный сложный сигнал формируется с шириной полосы, существенно большей, чем ширина полосы сложного зондирующего сигнала. Отметим, что точность определения дистанции до цели зависит от длительности того отклика, по которому эта дистанция определяется: в данном случае это отклик специально сформированного сложного сигнала на выходе второго согласованного фильтра. Данный результат достигается при совместной работе вновь введенных блоков, связей между ними и связей этих блоков с другими блоками гидролокатора.
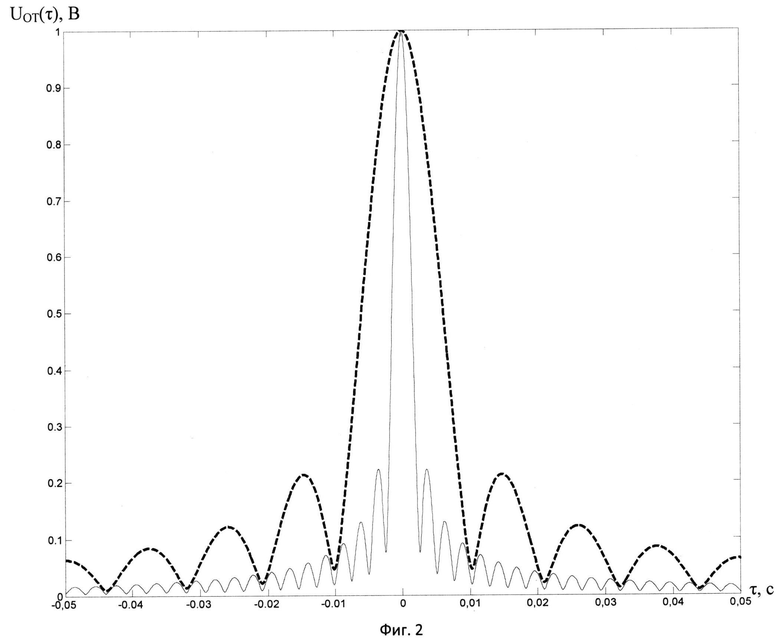
Сущность изобретения поясняется фиг.1 и фиг.2, где на фиг.1 приведена блок-схема предложенного активного гидролокатора, а на фиг.2 представлены огибающая отклика сигнала на выходе второго согласованного фильтра (сплошная линия) и огибающая сигнального отклика на выходе первого согласованного фильтра (штриховая линия).
Активный гидролокатор (фиг.1) содержит последовательно соединенные устройство 3 синхронизации, устройство 4 формирования сложного зондирующего сигнала, генераторное устройство 5 и излучающую акустическую антенну 1. Гидролокатор (фиг.1) содержит также последовательно соединенные приемную акустическую антенну 2, устройство 6 формирования характеристики направленности, первый согласованный фильтр 7, устройство 8 обнаружения эхо-сигнала, а также устройство 13 определения дистанции до цели. При этом второй выход устройства 4 соединен со вторым входом устройства 7. Также активный гидролокатор содержит последовательно соединенные запоминающее устройство 9, устройство 10 выделения сигнального отклика сложного эхо-сигнала, модулятор 11 и второй согласованный фильтр 12. Вход устройства 14 формирования модулирующей функции вспомогательного сложного сигнала соединен с выходом устройства 10, а первый и второй выходы устройства 14 соединены со вторыми входами модулятора 11 и второго согласованного фильтра 12 соответственно. Вход устройства 15 выработки строба соединен с выходом устройства 8, выход устройства 7 соединен с первым входом устройства 9, первый, второй и третий выходы устройства 15 соединены со вторым входом устройства 9, вторым входом устройства 10 и первым входом устройства 13 соответственно. Второй вход устройства 13 соединен с выходом второго согласованного фильтра 12, а второй вход устройства 8 соединен со вторым выходом устройства 3.
Практическое исполнение блоков, входящих в изобретение, известно из практики гидроакустики и реализуется на основе применения цифровых устройств.
Блок 9 и согласованные фильтры 12, 13 могут быть реализованы на основе технических решений, приведенных в книге Проектирование импульсных и цифровых устройств радиотехнических систем. / Гришин Ю.П., Казаринов Ю.М., Катиков В.М. и др.; Под ред. Ю.М. Казаринова. М.: Высш. шк., 1985. на С.51 и С.147-150.
Блоки 11, 14 выполняются с использованием технических решений, приведенных в книге Цифровые радионавигационные устройства / В.В. Барашенков, А.Е. Лутченко, Е.М. Скороходов и др.; под ред. В.Б. Смолова. М.: Сов. радио, 1980. С.196-206.
Блоки 10, 15 реализуются с использованием технических средств, описанных в книге Проектирование импульсных и цифровых устройств радиотехнических систем. / Гришин Ю.П., Казаринов Ю.М., Катиков В.М. и др.; Под ред. Ю.М. Казаринова. М.: Высш. шк., 1985. С.155-163.
Работа устройства осуществляется следующим образом. Устройство 4 формирования сложного зондирующего сигнала вырабатывает зондирующие сигналы. Гидролокатор производит излучение зондирующего сигнала с помощью генераторного устройства 5 и излучающей акустической антенны 1. Отраженный от объекта эхо-сигнал с выхода приемной акустической антенны 2 поступает на устройство 6 формирования характеристик направленности. С выхода устройства 6 сигнальный массив поступает на устройство 7, обеспечивающее согласованную фильтрацию принятых сигналов, при этом на другой вход блока 7 поступает опорный сигнал с выхода блока 4. С выхода блока 7 сигнальный процесс поступает на устройство обнаружения эхо-сигнала 8 и на вход запоминающего устройства 9, которое работает в режиме обновления запоминаемой информации. При обнаружении эхо-сигнала в устройстве выработки строба 15 вырабатывается стробирующий импульс, середина которого по времени соответствует моменту обнаружения эхо-сигнала, а длительность которого дает возможность, с учетом приборных ошибок сформировать в блоке 9 необходимый массив сигнального процесса, включающий на некоторой протяженности по времени как отклик эхо-сигнала, так и шумы. Этот массив передается в блок 10. В блоке 10 происходит выделение сигнального отклика эхо-сигнала из поступившего в блок 10 массива. На входы модулятора 11 поступают сигнальный отклик сложного эхо-сигнала в виде радиоимпульса (то есть импульса с высокочастотным заполнением) из блока 10 и модулирующая функция вспомогательного сложного сигнала из блока 14. С выхода блока 11 на вход второго согласованного фильтра 12 поступает сформированный, на основе отклика эхо-сигнала, сложный сигнал. На другой вход блока 12 поступает модулирующая функция вспомогательного сложного сигнала из блока 14. В результате на выходе блока 12 возникает сжатый по длительности отклик сформированного вспомогательного сложного сигнала в виде огибающей радиоимпульса.
Длительность отклика вспомогательного сложного сигнала существенно меньше сигнального отклика эхо-сигнала. Этот эффект иллюстрируется на примере с помощью фиг.2. На фиг.2 представлено:
- огибающая сигнального отклика эхо-сигнала (штриховая линия) на выходе первого согласованного фильтра, ширина полосы сформированного в данном случае сложного зондирующего сигнала равна 100 Гц, длительность основного лепестка огибающей сигнального отклика эхо-сигнала по уровню (минус 3 дБ) равна, соответственно, 10 мс.
- огибающая отклика сложного сигнала на выходе второго согласованного фильтра (сплошная линия), ширина полосы сформированного в данном случае вспомогательного сложного сигнала равна 400 Гц, длительность основного лепестка огибающей сигнального отклика вспомогательного сложного сигнала по уровню (минус 3 дБ) равна, соответственно, 2,5 мс;
Таким образом, в данном примере длительность отклика сформированного вспомогательного сложного сигнала в 4 раза меньше длительности отклика эхо-сигнала, за счет этого и происходит существенное повышение точности определения дистанции до цели.
С выхода блока 12 огибающая отклика второго согласованного фильтра поступает на вход устройства 13 определения дистанции до цели. В блоке 13 производится определение интервала τ3 между моментом времени tи, соответствующим концу излучения зондирующего сигнала, и моментом времени tм, соответствующим максимуму выходного отклика блока 12. Далее в блоке 13 определяется дистанция до цели с использованием соотношения:
D=с·τ3/2,
где с - скорость звука в воде.
Величина τ3 определяется в блоке 13 по соотношению:
τ3=τстр+τм,
где τстр - интервал времени между концом излучения и моментом начала стробирующего импульса, измеряется в блоке 15;
τм - интервал времени между началом стробирующего импульса и моментом tм, измеряется в блоке 13.
Устройство 3 управляет во времени формированием зондирующего сигнала (блок 4) и соответственно работой генераторного устройства 5, а также обеспечивает через блок 8 синхронизацию работы блоков 9, 10, 13, 14 и 15.
Использование запоминающего устройства, устройства выделения сигнального отклика сложного эхо-сигнала, устройства формирования модулирующей функции вспомогательного сложного сигнала, модулятора, второго согласованного фильтра, устройства выработки строба, с соответствующими связями между этими блоками и связями этих блоков с другими блоками активного гидролокатора, обеспечивает повышение точности определения дистанции до цели на основе измерения времени задержки отклика на выходе второго согласованного фильтра для специально сформированного вспомогательного сложного сигнала, причем длительность этого отклика существенно меньше длительности сигнального отклика эхо-сигнала.
Это позволяет считать, что заявленный технический результат достигнут.
| название | год | авторы | номер документа |
|---|---|---|---|
| АКТИВНЫЙ ГИДРОЛОКАТОР | 2013 |
|
RU2543674C1 |
| АКТИВНЫЙ ГИДРОЛОКАТОР | 2013 |
|
RU2545326C1 |
| АКТИВНЫЙ ГИДРОЛОКАТОР | 2015 |
|
RU2590226C1 |
| Активный гидролокатор | 2019 |
|
RU2719214C1 |
| АКТИВНЫЙ ГИДРОЛОКАТОР | 2009 |
|
RU2408897C1 |
| Гидролокатор с трактом прослушивания эхо-сигналов | 2017 |
|
RU2649655C1 |
| ГИДРОЛОКАЦИОННАЯ СТАНЦИЯ С ЗОНДИРУЮЩИМИ ИМПУЛЬСАМИ СЛОЖНОЙ ФОРМЫ | 1969 |
|
SU1840753A1 |
| АКТИВНЫЙ ГИДРОЛОКАТОР | 2013 |
|
RU2528113C1 |
| АКТИВНЫЙ ГИДРОЛОКАТОР | 2007 |
|
RU2346295C1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ КЛАССИФИКАЦИИ ГИДРОЛОКАТОРА БЛИЖНЕГО ДЕЙСТВИЯ | 2013 |
|
RU2534731C1 |
Изобретение относится к гидроакустической технике, конкретнее к области активной гидролокации, в том числе к активным гидролокаторам, предназначенным для обнаружения объектов, измерения координат и параметров движения обнаруженных объектов. Техническим результатом изобретения является то, что обеспечивается повышение точности определения дистанции до цели. Это достигается за счет того, что определение дистанции до цели производится на основе измерения времени задержки отклика на выходе второго согласованного фильтра для специально сформированного (на основе отклика эхо-сигнала на выходе первого согласованного фильтра) вспомогательного сложного сигнала, причем длительность отклика на выходе второго согласованного фильтра существенно меньше длительности отклика эхо-сигнала на выходе первого согласованного фильтра. 2 ил.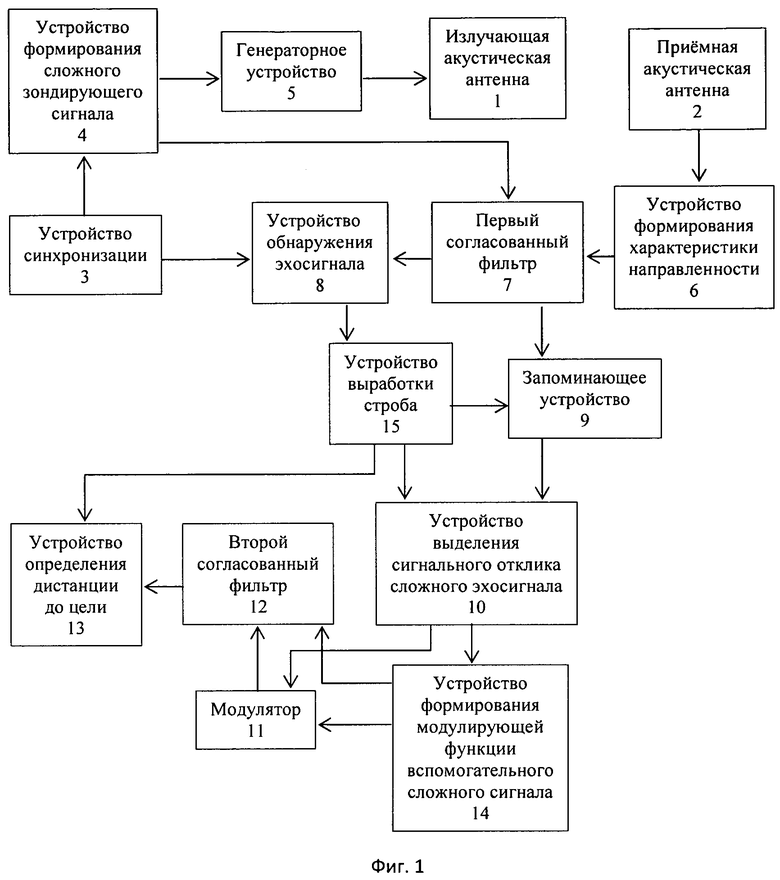
Активный гидролокатор, содержащий последовательно соединенные устройство синхронизации, устройство формирования сложного зондирующего сигнала, генераторное устройство и излучающую акустическую антенну, также содержащий последовательно соединенные приемную акустическую антенну, устройство формирования характеристики направленности, первый согласованный фильтр, устройство обнаружения эхо-сигнала, при этом второй выход устройства формирования сложного зондирующего сигнала соединен со вторым входом первого согласованного фильтра, также содержащий устройство определения дистанции до цели, отличающийся тем, что в него введены последовательно соединенные запоминающее устройство, устройство выделения сигнального отклика сложного эхо-сигнала, модулятор и второй согласованный фильтр, также введено устройство формирования модулирующей функции вспомогательного сложного сигнала и устройство выработки строба, при этом вход устройства формирования модулирующей функции вспомогательного сложного сигнала соединен с выходом устройства выделения сигнального отклика сложного эхо-сигнала, а первый и второй выходы устройства формирования модулирующей функции вспомогательного сложного сигнала соединены со вторыми входами модулятора и второго согласованного фильтра соответственно, вход устройства выработки строба соединен с выходом устройства обнаружения эхо-сигнала, выход первого согласованного фильтра соединен с первым входом запоминающего устройства, первый, второй и третий выходы устройства выработки строба соединены со вторым входом запоминающего устройства, вторым входом устройства выделения сигнального отклика сложного эхо-сигнала и первым входом устройства определения дистанции до цели соответственно, второй вход которого соединен с выходом второго согласованного фильтра, при этом второй вход устройства обнаружения эхо-сигнала соединен со вторым выходом устройства синхронизации.
| АКТИВНЫЙ ГИДРОЛОКАТОР | 2007 |
|
RU2346295C1 |
| ПАРАМЕТРИЧЕСКИЙ ЭХО-ИМПУЛЬСНЫЙ ЛОКАТОР | 1996 |
|
RU2133047C1 |
| Способ прессования труб с внутренними ребрами и утолщениями | 1957 |
|
SU114169A1 |
| УСТРОЙСТВО ДЛЯ ФОРМОВКИ КОЛПАЧКОВ ДЛЯ РЕКТИФИКАЦИОННЫХ КОЛОНН ИЗ МАТЕРИАЛОВ С МАЛОЙ ПРОЧНОСТЬЮ В СЫРОМ СОСТОЯНИИ | 1950 |
|
SU92201A1 |
| ПРИБОР ДЛЯ ИЗМЕРЕНИЯ МАЛЫХ ЕМКОСТЕЙ | 1950 |
|
SU90574A1 |
| 0 |
|
SU299051A1 |

