ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к определению оптимальных траекторий перемещения космического летательного аппарата и может использоваться для решения широкого круга задач, задействующих оптимизацию траекторий перемещения космических летательных аппаратов, например космических кораблей, ракет, космических челноков и т.д.
В частности настоящее изобретение позволяет определять оптимальную траекторию перемещения в данном диапазоне эпохи, причем оптимальная траектория перемещения позволяет, в целом, отвечать требованию данной космической миссии и, в частности, минимизировать время перемещения, расход топлива или комбинацию их обоих.
УРОВЕНЬ ТЕХНИКИ
Как показано, в литературе дается определение наилучшей траектории космического летательного аппарата для данной миссии как "двухточечной краевой задачи", и она состоит в определении траектории, среди всех возможных, соединяющей две разные точки в пространстве (представляющие граничные условия) и позволяющей максимизировать или минимизировать данную функцию стоимости (также именуемую индексом стоимости). Уравнения движения являются дифференциальными ограничениями задачи.
Известно несколько способов оптимизации, полезных для решения задач оптимизации, связанных с космическими перемещениями, которые делятся, по существу, на две основные категории:
- классические, косвенные способы на основе принципа максимума Понтрягина; и
- прямые способы, которые пытаются найти минимум функции стоимости многими численными методами и могут дополнительно группироваться в
прямые способы, применяемые в вариационном исчислении, и
методы поиска.
Генетические алгоритмы также применяются для решения задач, связанных с межпланетными перемещениями.
Ниже приведено краткое описание вышеперечисленных известных способов.
Принцип максимума Понтрягина является основной теоремой вариационного исчисления, применяемой к теории оптимального управления: он дает некоторые необходимые условия для определения оптимального решения анализируемой задачи, и он основан только на дифференциальных свойствах, которые определенные классы функций демонстрируют в точках экстремума. Согласно таким условиям можно определять развитие во времени некоторых параметров, так называемых множителей Лагранжа, используемых для оценивания переменных управления, необходимых для решения задачи оптимизации. Начальные значения множителей Лагранжа неизвестны, и их можно оценивать численно, чтобы удовлетворять граничным условиям. Другими словами, задача оптимизации полностью сводится к определению начальных значений множителей Лагранжа. Задача становится еще более сложной, когда конечное состояние не полностью определено, то есть некоторые переменные вектора состояния не назначены на граничных условиях. Помимо условий, заданных принципом максимума Понтрягина, следует рассматривать дополнительные ограничения, заданные как "условия трансверсальности".
В частности косвенные способы посредством условий, заданных принципом максимума Понтрягина, позволяют определить в ходе выполнения, какой путь является наилучшим для использования переменных управления для решения задачи оптимизации, но такие переменные в начале неизвестны, как показано ниже.
Пусть
- это система дифференциальных уравнений в частных производных первого порядка, где х - вектор состояния, и u - так называемый вектор управления, то есть вектор, определяемый в ходе выполнения для минимизации или максимизации данной функции стоимости J. Обращаясь к формулировке задачи Больца, функция стоимости может иметь вид:

Предположим, например, что функцию стоимости J нужно минимизировать. Это приводит к следующему условию
Пусть также H(x, u, λ, t) является функцией Гамильтона, связанной с системой, выраженной в форме:


предыдущие формулы принимают вид:
и
где λ - вектор множителей Лагранжа (который также задан как вектор косостояния или вектор сопряженной переменной). Принцип максимума Понтрягина утверждает, что если x(t), λ(t) удовлетворяют условия:
и для всех 

то u* является желаемым оптимальным управлением, которое максимизирует функцию Гамильтона H.
Помимо принципа максимума Понтрягина, если вектор состояния не полностью определен на границах, необходимо добавить дополнительные условия под названием "условия трансверсальности". Количество этих дополнительных ограничений равно количеству составляющих в векторе состояния, которые не определены на границах. Например, если конечный момент времени не установлен, соответствующее условие трансверсальности должно быть:
Hf=1,
если рассмотреть задачу минимального времени перемещения, или:
Hf=0,
если анализируется задача минимального расхода топлива.
Количество и выражение условий трансверсальности изменяется согласно данной анализируемой задаче.
Применим вышеприведенную общую формулировку к двухточечной задаче, в случае межпланетных перемещений, например, рассмотрим перемещение Земля-Марс. Согласно гипотезе копланарного движения (все орбиты основных тел в Солнечной системе имеют малый наклон относительно плоскости Эклиптики) и, рассматривая инерциальную систему координат xOy, где начало отсчета О совпадает с центром масс Солнца, уравнения движения можно записать следующим образом:
где {x, y, u, v, m} - вектор состояния (х, у - компоненты вектора положения, a u, v - компоненты вектора скорости; m фактическая масса космического летательного аппарата), µ - гравитационный параметр Солнца, Т - уровень тяги, достижимый на данной силовой установке (непрерывного маневрирования) и δ - функция включения-отключения, представляющая состояние силовой установки (δ=0 - двигатель отключен; δ=1 - двигатель действует), {vx, vy} - единичный вектор, указывающий направление тяги. Для данных времени вылета t0 и времени прилета tf космического летательного аппарата можно также определить функционал
который нужно минимизировать (т.е. нужно минимизировать время перемещения); соответствующая функция Гамильтона должна принять вид:

или более удобным образом:

где {λх,λy,λu,λv} - вектор множителей Лагранжа (вектор косостояния). Применим принцип максимума Понтрягина. Управление является оптимальным, если и только если:
и

Первое условие утверждает, что направление вектора тяги {vx, vy} должно быть выровнено с вектором {λu, λv}, а второе условие указывает, удобно ли включать маневровый двигатель. В отношении производных косостояния, принцип максимума Понтрягина утверждает, что:
Если все эти условия выполняются, принцип максимума Понтрягина полностью удовлетворяется, и оптимальное направление тяги задается аналитически через переменные косостояния λu, λv. Основная проблема, оказывающая влияние на этот подход, состоит в том, что начальные значения {λх, λy, λu, λv, λm,} неизвестны и не поддаются оценке из физических соображений; можно лишь предположить порядок величины каждого члена, исходя из соответствующей производной. Безусловно, существует ограниченное количество оптимальных векторов {λх,0, λy,0, λu,0, λv,0, λm,0}, которые нужно искать в ℜ5 (или в ℜ7, если гипотеза копланарного движения неверна), позволяющих достичь желаемых конечных условий. Ясно, что такой подход, хотя он дает аналитическое выражение для оптимальных направления и величины тяги, выглядит весьма неудовлетворительным ввиду трудности достижения конечных условий.
Напротив, прямые способы, применяемые в вариационном исчислении, основаны на аппроксимации вектора состояния и функционала стоимости через представления последовательности. Выбрав надлежащее множество элементарных функций для представления последовательности, на основании данных гипотез, можно найти неизвестные коэффициенты последовательности путем нахождения экстремума приближенного функционала стоимости. Другими словами, задача нахождения экстремума функционала на множестве функций сводится к нахождению экстремума функции на множестве параметров. Полученное решение является, в целом, приближенным решением, если множество параметров не является бесконечным множеством.
В частности, такого рода прямые способы призваны сводить задачу максимизации (или минимизации) функционала относительно функции к задаче максимизации (или минимизации) функции на множестве переменных через представления последовательности, хотя полученное решение является, в целом, приближенным решением, если множество параметров не является бесконечным множеством. Рассмотрим 1-мерную дифференциальную задачу, выраженную в форме 
и также
где ak - коэффициенты, не зависящие от времени, и ψk(t} известные функции. Ясно, что нужно применять усеченные формы предыдущих выражений:
Предполагается, что эта последовательность аппроксимирующих функций полна для функций x(t). По определению, последовательность аппроксимирующих функций полна при следующем условии: для всех ε>0 существует целое число j, для которого:
Важность этого определения заключается в том, что
если J(x) строго непрерывен и если последовательность функций полна. Приближенный функционал Jn(xn) должен принимать форму:
Для решения задачи оптимизации Jn(xn) должен быть стационарным относительно каждого ak, то есть:
Выполнив указанные интегрирования, результирующую систему уравнений можно решить для стационарных точек, и эти стационарные точки, которые являются относительными максимумами (или минимумами), можно определить методами поиска. Функционал Jn(xn) часто выражают следующим образом:
Кроме того, методы поиска основаны на численных методах для оценивания оптимального решения, начиная с приближенного оценивания функции стоимости. Получив такую аппроксимацию, можно искать множество переменных, максимизирующих (или минимизирующих) функцию стоимости в данной области; поэтому такие способы также называются "методам поиска". Функцию можно задавать аналитически или определять экспериментально; она может иметь или не иметь разрывы, и могут существовать ограничительные уравнения, ограничивающие аргументы меры производительности. В последнем случае задача называется задачей "нелинейного программирования". Среди методов поиска максимума (или минимума) следует упомянуть способы градиентного поиска, одномерного поиска и непоследовательного поиска.
Кроме того, генетические алгоритмы представляют собой методы поиска, используемые для нахождения точных или приближенных решений задач оптимизации и поиска. Они принадлежат широкому классу эволюционных алгоритмов, которые используют теоретические построения, инспирированные эволюционной теорией в биологии, например, наследственность, мутация, селекция и кроссинговер. Для решения задачи оптимизации выбирается несколько множеств, состоящих из двух или более параметров управления, именуемых хромосомами; после построения хромосом имеют место случайные "совпадения" между хромосомами, и благодаря кроссинговеру порождаются новые хромосомы (потомки), будем надеяться, более близкие к желаемому решению. Кроссинговеры происходят согласно данным правилам. Затем весь процесс повторяется до тех пор, пока не будут получены значительные усовершенствования; таким образом, алгоритм находит оптимальное решение.
Всем вышеописанным методам оптимизации присущи внутренние ограничения, ограничивающие их применимость данной задачей или их эффективность при нахождении решения.
Кроме того, заявитель обратил внимание на то, что "двухточечная краевая задача" применительно к перемещениям космических летательных аппаратов, не только межпланетным, оказалась более сложной, чем предполагалось (этот результат будет описан ниже), и это сильно влияет на действенность каждого вышеописанного способа.
Что касается косвенных способов, хотя выполняются некоторые аналитические ограничения по оптимальности, не удается заранее установить значение начальных множителей Лагранжа, позволяющее отвечать граничным условиям. Трехмерный анализ двухточечной задачи оптимизации потребовал бы шести множителей для вектора состояния космического летательного аппарата, плюс одинсоответствующий его массе. Кроме того, если начальная эпоха является параметром для оптимизации, также следует рассматривать начальный момент t0 для начала миссии. Что касается начальной эпохи t0, может быть важно подчеркнуть, что при рассмотрении межпланетных перемещений, в особенности при анализе перемещений среди внутренних планет, выбор начальной эпохи t0 играет важнейшую роль в планировании миссии, поскольку эпоха определяет взаимное расположение начальной и целевой точек. Если взаимное расположение не выбрано правильно, космическая миссия также может окончиться неудачей.
Поэтому, что касается косвенных способов, до восьми переменных для оптимизации можно включать в анализ для оптимизации, и это приводит к большим затратам времени вычисления.
Что касается прямых способов, применяемых в вариационном исчислении, весьма трудно получить аналитическое выражение для ошибки, вносимой вышеописанной процедурой, поэтому трудно оценить, сходится ли аппроксимация функции стоимости, из-за чего трудно понять, совпадает ли приближенное решение с реальным поведением оптимального решения. Кроме того, анализ N-мерных задач, например межпланетного перемещения, требует большого количества интегрирований и коэффициентов, но всех этих усилий самих по себе может быть недостаточно для обеспечения удовлетворительного представления функционала стоимости вследствие взаимозависимости всех переменных в векторе состояния.
Другое ограничение, влияющее на подобные способы, состоит в том, что функционал стоимости, а также компоненты вектора состояния должны быть непрерывными в области интегрирования. Задачи, предусматривающие мгновенные изменения вектора состояния, например, переход между системами координат в ходе межпланетного перемещения или отход ступени при анализе траектории ракеты-носителя, не поддаются уверенному решению этими способами.
Градиентные способы основаны на определении градиента функции стоимости посредством нескольких оценок самой функции относительно данных параметров: чем лучше известен градиент функции, тем выше вероятность нахождения минимума (или максимума) в области поиска. Локальные минимумы можно получить быстро, если функция стоимости является гладкой относительно выбранных параметров; другие задачи, например оценивание траектории космического летательного аппарата, отличаются поразительно неправильным функционалом стоимости, что показано в дальнейшем. Поэтому градиентные методы поиска не могут быть надежными при рассмотрении подобных задач.
Способы одномерного поиска весьма просто и легко реализовать. Такие способы используют, например, те, кому приходится настраивать электрическую цепь, регулируя несколько параметров. Сначала один из параметров регулируется, пока не будет достигнуто дальнейшее улучшение; затем настраивается другой параметр, пока не будет достигнуто дополнительное улучшение, и т.д. После однократной регулировки каждого параметра процесс повторяется путем возврата к первому параметру и проведения вышеописанных операций. Согласно неправдоподобной гипотезе, что параметры не взаимодействуют друг с другом, эта процедура приводит к желаемой оптимальной конфигурации. Взаимозависимость среди переменных сильно влияет на области применения этой процедуры.
Непоследовательный поиск производится по равномерно разнесенным точкам в односвязной области евклидова пространства. Каждой из координат xi назначается множество равномерно разнесенных точек, именуемых точками сетки, и используются только значения xi в этих точках сетки. Затем оценивается функция стоимости для всех возможных комбинаций точек сетки, и значение сетки вектора х, обеспечивающее наилучшую f(x), считается выигрышным. Поисковик должен соответственно выбирать интервал сетки; что касается количества необходимых точек данных, если каждой координате xi назначается k разнесенных точек, полный объем данных составляет kn, где n - количество составляющих в х. Методы непоследовательного поиска не требуют предположений, касающихся резкости изменений вектора состояния и функционала стоимости, но большое количество необходимых оценок делает их совершенно неэффективными.
Рассмотрим теперь двухточечную краевую задачу и предположим, что полное время перемещения является функционалом, подлежащим минимизации. Общий метод, используемый для решения двухточечной задачи, состоит в минимизации

расширенной функции стоимости 
где (rf-rtarget) - разность между вектором конечного положения космического летательного аппарата и вектором целевого положения, (Vf-Vtarget) - разность между вектором конечной скорости космического летательного аппарата и вектором целевой скорости, и Yf - угол полета, который должен быть близким к нулю, чтобы траектория перемещения космического летательного аппарата, в конце концов, проходила по касательной к целевой орбите при совпадении. Коэффициенты δr, δV, δγ представляют допуски, а также tref, вносимые для того, чтобы сделать функционал однородным. Такой функционал стоимости удобен для повышения правдоподобия сходимости к оптимальному решению при данных граничных ограничениях. Возникает проблема, состоящая в том, что такого рода функция демонстрирует две разные тенденции, которые делают нахождение оптимального решения очень трудным.
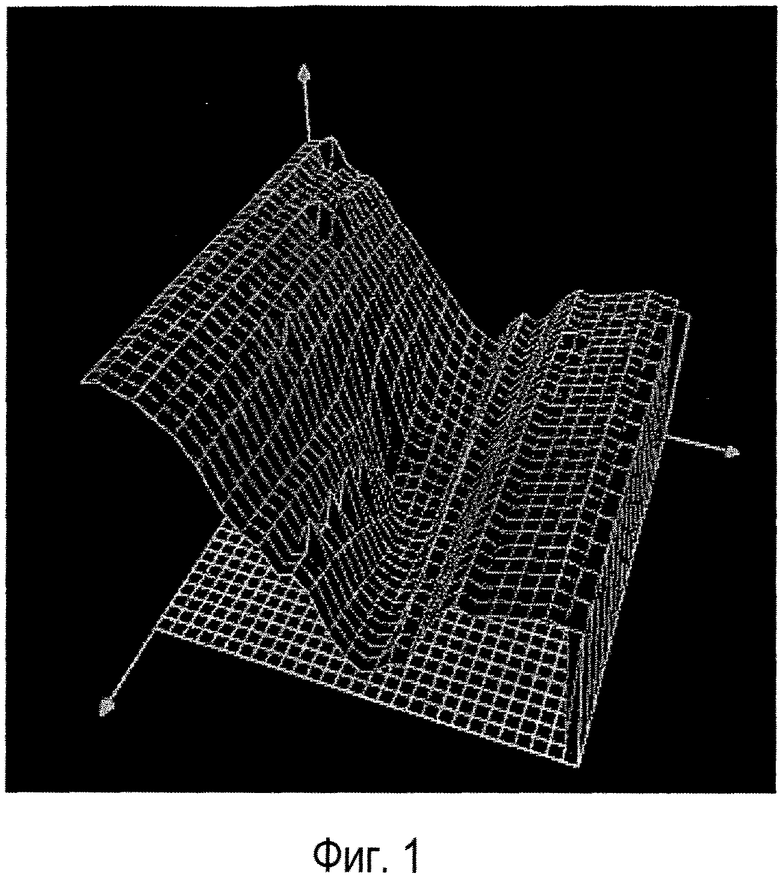
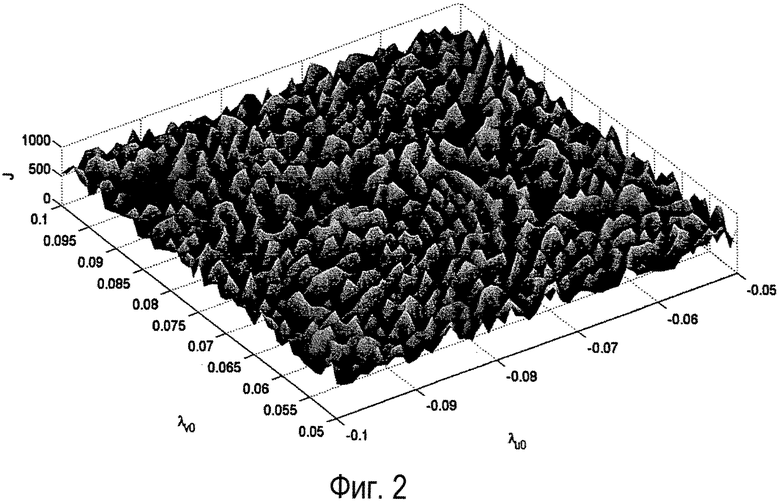
В частности, такого рода функция демонстрирует плавный макроскопический тренд и неправильное микроскопическое поведение, как показано на фиг. 1 и на фиг. 2, соответственно.
В частности, фиг. 1 демонстрирует пример макроскопического тренда расширенной функции стоимости 

Это представляет доказательство того факта, что двухточечная краевая задача часто бывает гораздо сложнее, чем предполагается, и сходимость к истинному оптимальному решению является крайне маловероятным событием, по меньшей мере, согласно вышеописанным известным алгоритмам оптимизации.
ЗАДАЧА И СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Заявитель провел тщательное исследование для определения возможности разработки эффективного, не требующего больших вычислительных затрат способа, позволяющего надежно определять оптимальные траектории перемещения космических летательных аппаратов.
Задачей настоящего изобретения является предоставление способа определения оптимальных траекторий перемещения космических летательных аппаратов, который позволяет решить вышеописанные проблемы известных методов и преодолеть препятствия, делающие известные алгоритмы неэффективными.
Эта задача решается настоящим изобретением, которое относится к способу определения оптимальной траектории перемещения космического летательного аппарата; программе программного обеспечения, содержащей участки кода программного обеспечения для реализации, при ее выполнении, упомянутого способа; программному продукту программного обеспечения, содержащему компьютерно-читаемый носитель, на котором хранится упомянутая программа программного обеспечения; электронному процессору, сконфигурированному для реализации упомянутого способа; и космическому летательному аппарату, содержащему электронный процессор, сконфигурированный для реализации упомянутого способа, как задано в прилагаемой формуле изобретения.
В частности, настоящее изобретение относится к способу определения траектории перемещения космического летательного аппарата, например космического корабля, ракеты, космического челнока и т.д., от начального космического тела к целевому космическому телу относительно данного центрального космического тела, причем определенная траектория является оптимальной в отношении того, чтобы перемещение космического летательного аппарата отвечало требованию данной космической миссии; причем способ содержит этапы, на которых:
- предоставляют, согласно принципу максимума Понтрягина, физико-математическую модель, связывающую модельные величины и физические величины, представляющие перемещение космического летательного аппарата относительно данного центрального космического тела, причем модельные величины содержат первую векторную величину модели и вторую векторную величину модели, причем первая векторная величина модели имеет первый модуль, изменяющийся во времени, и первую ориентацию в пространстве, которая изменяется во времени и задается первым углом долготы, изменяющимся во времени, и первым углом возвышения, изменяющимся во времени, причем первая векторная величина модели представляет, момент за моментом, соответствующее оптимальное направление тяги космического летательного аппарата относительно требования данной космической миссии, причем вторая векторная величина модели имеет второй модуль, изменяющийся во времени, и вторую ориентацию в пространстве, которая изменяется во времени и задается вторым углом долготы, изменяющимся во времени, и вторым углом возвышения, изменяющимся во времени, причем вторая векторная величина модели представляет, момент за моментом, развитие во времени первой векторной величины модели;
- устанавливают, в физико-математической модели, начальные и конечные граничные условия, причем начальные граничные условия таковы, что в начальный момент времени перемещения положение и скорость космического летательного аппарата близки к положению и скорости соответственно начального космического тела, причем конечные граничные условия таковы, что в конечный момент времени перемещения положение и скорость космического летательного аппарата близки к положению и скорости соответственно целевого космического тела;
- устанавливают, в физико-математической модели, первые условия так, что второй модуль связан с первым модулем через величину, связанную с угловой скоростью в зависимости от данного центрального космического тела;
- устанавливают, в физико-математической модели, вторые условия так, что конкретный угол долготы, между первым углом долготы и вторым углом долготы, и конкретный угол возвышения, между первым углом возвышения и вторым углом возвышения, не зависят друг от друга;
- рассматривают первые начальные моменты времени, включенные в данный временной диапазон, первые значения долготы конкретного угла долготы, включенные в данный диапазон долготы, и первые значения возвышения конкретного угла возвышения, включенные в данный диапазон возвышения; и
- определяют траекторию перемещения космического летательного аппарата на основании физико-математической модели, рассматриваемых первых начальных моментов времени, рассматриваемых первых значений долготы и рассматриваемых первых значений возвышения.
Предпочтительно определение траектории перемещения космического летательного аппарата на основании физико-математической модели, рассматриваемых первых начальных моментов времени, рассматриваемых первых значений долготы и рассматриваемых первых значений возвышения содержит этапы, на которых:
вычисляют значения данной функции стоимости, связанной с требованием данной космической миссии, причем значения данной функции стоимости вычисляются на основании рассматриваемых первых начальных моментов времени, рассматриваемых первых значений долготы и рассматриваемых первых значений возвышения;
определяют приближенную функцию стоимости на основании вычисленных значений данной функции стоимости;
вычисляют значения приближенной функции стоимости на основании рассматриваемых первых начальных моментов времени, рассматриваемых первых значений долготы и рассматриваемых первых значений возвышения;
идентифицируют, среди вычисленных значений приближенной функции стоимости, экстремальное значение приближенной функции стоимости и, среди рассматриваемых первых начальных моментов времени, среди рассматриваемых первых значений долготы и среди рассматриваемых первых значений возвышения, оптимальный начальный момент времени, оптимальное значение долготы и оптимальное значение возвышения соответственно на основании которых вычислено экстремальное значение приближенной функции стоимости; и
определяют траекторию перемещения космического летательного аппарата на основании физико-математической модели, идентифицированного оптимального начального момента времени, идентифицированного оптимального значения долготы и идентифицированного оптимального значения возвышения.
Более предпочтительно, способ согласно настоящему изобретению дополнительно содержит этапы, на которых:
- если траектория, определенная на основании физико-математической модели, рассматриваемых первых начальных моментов времени, рассматриваемых первых значений долготы и рассматриваемых первых значений возвышения, не отвечает начальным граничным условиям и конечным граничным условиям в пределах предварительно заданного допуска,
выбирают временной поддиапазон на основании данного временного диапазона и идентифицированного оптимального начального момента времени,
выбирают поддиапазон долготы на основании данного диапазона долготы и идентифицированного оптимального значения долготы,
выбирают поддиапазон возвышения на основании данного диапазона возвышения и идентифицированного оптимального значения возвышения,
рассматривают вторые начальные моменты времени, включенные в выбранный временной поддиапазон, вторые значения долготы конкретного угла долготы, включенные в выбранный поддиапазон долготы, и вторые значения возвышения конкретного угла возвышения, включенные в выбранный поддиапазон возвышения, и
определяют траекторию перемещения космического летательного аппарата на основании физико-математической модели, рассматриваемых вторых начальных моментов времени, рассматриваемых вторых значений долготы и рассматриваемых вторых значений возвышения.
В частности, выбор временного поддиапазона на основании данного временного диапазона и идентифицированного оптимального начального момента времени содержит этапы, на которых:
выбирают временной поддиапазон, который включен в данный временной диапазон, имеет меньшую протяженность, чем протяженность данного временного диапазона, и сцентрирован на идентифицированном оптимальном начальном моменте времени.
Кроме того, выбор поддиапазона долготы на основании данного диапазона долготы и идентифицированного оптимального значения долготы содержит этапы, на которых:
выбирают поддиапазон долготы, который включен в данный диапазон долготы, имеет меньшую протяженность, чем протяженность данного диапазона долготы, и сцентрирован на идентифицированном оптимальном значении долготы.
Кроме того, выбор поддиапазона возвышения на основании данного диапазона возвышения и идентифицированного второго значения возвышения содержит этапы, на которых:
выбирают поддиапазон возвышения, который включен в данный диапазон возвышения, имеет меньшую протяженность, чем протяженность данного диапазона возвышения, и сцентрирован на идентифицированном оптимальном значении возвышения.
Удобно, чтобы способ согласно настоящему изобретению дополнительно содержал:
- если траектория, определенная на основании физико-математической модели, рассматриваемых вторых начальных моментов времени, рассматриваемых вторых значений долготы и рассматриваемых вторых значений возвышения, не отвечает начальным граничным условиям и конечным граничным условиям в пределах предварительно заданного допуска, повторение этапов, на которых
выбирают новый временной поддиапазон на основании предварительно выбранного временного поддиапазона и предварительно идентифицированного оптимального начального момента времени,
выбирают новый поддиапазон долготы на основании предварительно выбранного поддиапазона долготы и предварительно идентифицированного оптимального значения долготы,
выбирают новый поддиапазон возвышения на основании предварительно выбранного поддиапазона возвышения и предварительно идентифицированного оптимального значения возвышения,
рассматривают новые начальные моменты времени, включенные в выбранный новый временной поддиапазон, новые значения долготы конкретного угла долготы, включенные в выбранный новый поддиапазон долготы, и новые значения возвышения конкретного угла возвышения, включенные в выбранный новый поддиапазон возвышения, и
определяют траекторию перемещения космического летательного аппарата на основании физико-математической модели, рассматриваемых новых начальных моментов времени, рассматриваемых новых значений долготы и рассматриваемых новых значений возвышения;
и этап, на котором
- останавливают повторение, если траектория, определенная на основании физико-математической модели, рассматриваемых новых начальных моментов времени, рассматриваемых новых значений долготы и рассматриваемых новых значений возвышения, отвечает начальным граничным условиям и конечным граничным условиям в пределах предварительно заданного допуска.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Для лучшего понимания настоящего изобретения предпочтительные варианты осуществления, призванные служить исключительно примером, но не ограничением, будут описаны со ссылкой на прилагаемые чертежи (выполненные не в масштабе), в которых:
- фиг. 1 демонстрирует макроскопический тренд расширенной функции стоимости, подлежащей минимизации для решения двухточечной краевой задачи;
- фиг. 2 демонстрирует микроскопический тренд расширенной функции стоимости, показанной фиг. 1;
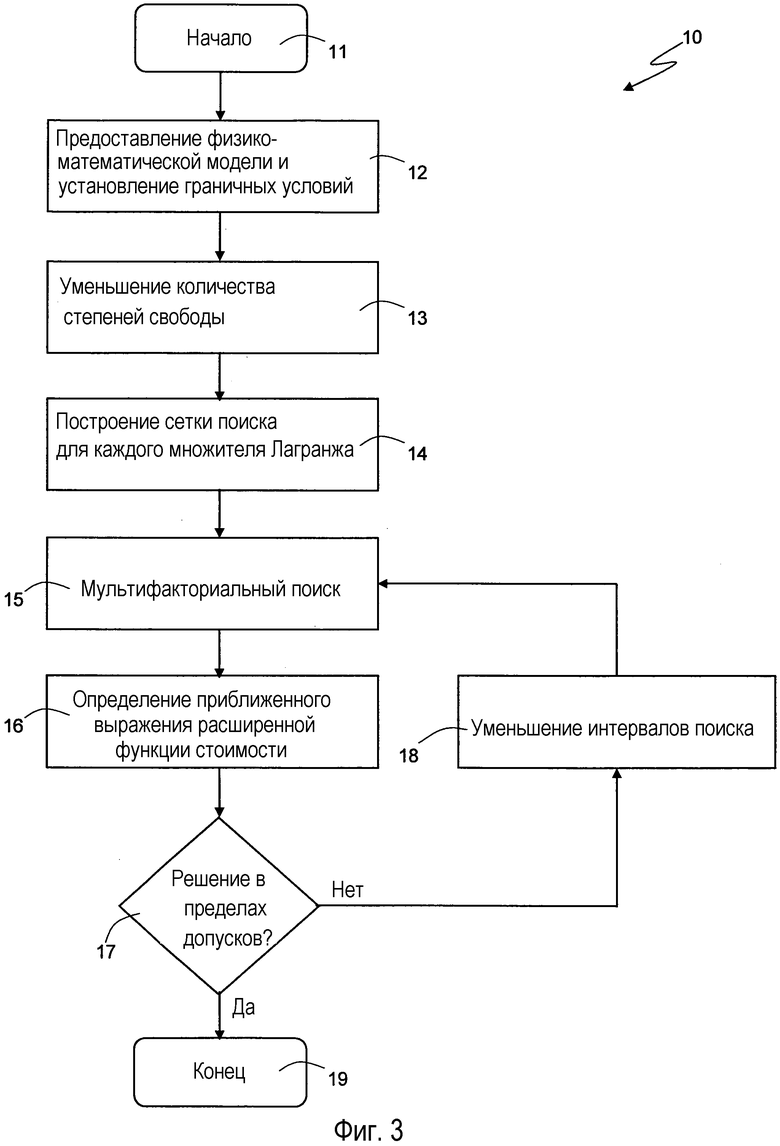
- фиг. 3 демонстрирует логическую блок-схему способа определения оптимальных траекторий перемещения космических летательных аппаратов согласно предпочтительному варианту осуществления настоящего изобретения;
- фиг. 4 демонстрирует первую сетку поиска, построенную для определения оптимальной траектории перемещения Земля-Марс согласно способу, показанному на фиг. 3;
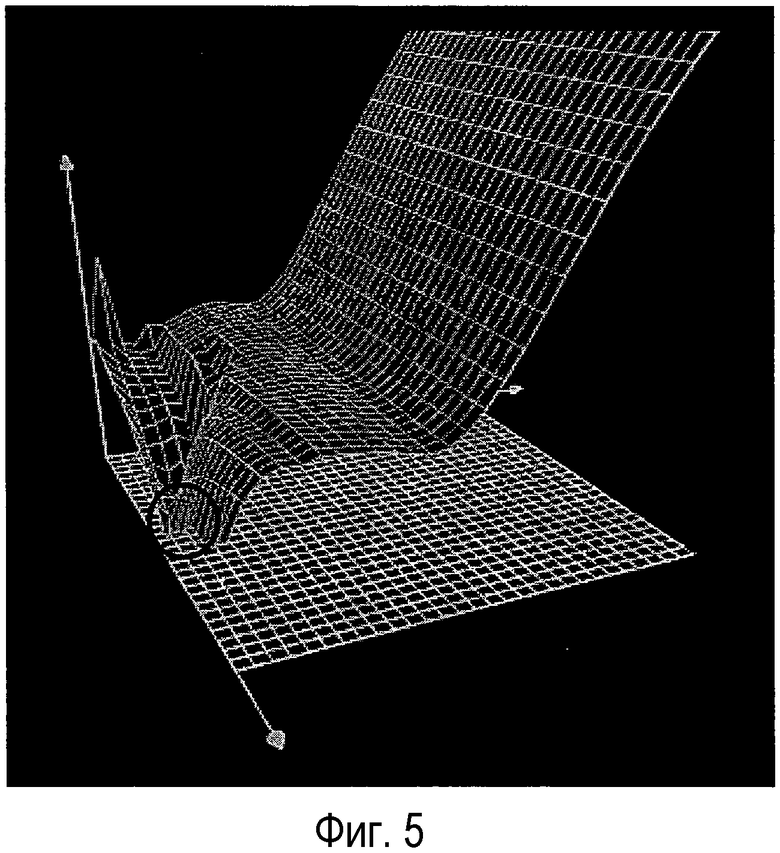
- фиг. 5 демонстрирует вторую сетку поиска, построенную для определения оптимальной траектории перемещения Земля-Марс согласно способу, показанному на фиг. 3;
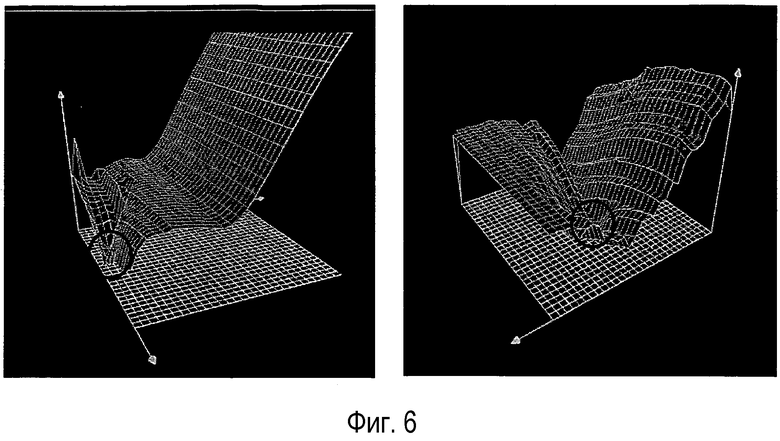
- фиг. 6 демонстрирует вторую сетку поиска, показанную на фиг. 5, совместно с третьей сеткой поиска, построенной для определения оптимальной траектории перемещения Земля-Марс согласно способу, показанному на фиг. 3; и
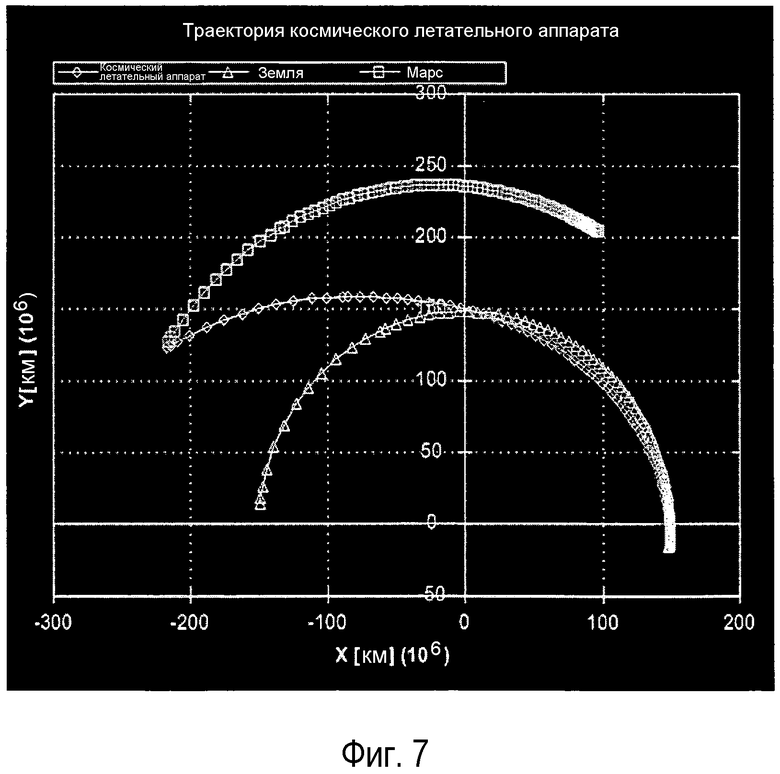
- фиг. 7 демонстрирует оптимальную траекторию перемещения Земля-Марс, определенную согласно способу, показанному на фиг. 3.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Нижеследующее рассмотрение представлено для того, чтобы специалист в данной области техники мог применять и использовать изобретение. Специалисты в данной области техники могут предложить различные модификации вариантов осуществления, не выходя за рамки заявленного объема настоящего изобретения. Таким образом, настоящее изобретение не предусматривает ограничение представленными вариантами осуществления, но должно соответствовать широчайшему объему, согласующемуся с принципами и признаками, раскрытыми в данном документе и заданными в прилагаемой формуле изобретения.
Кроме того, настоящее изобретение реализовано посредством программы программного обеспечения, загружаемой в память электронного процессора и содержащей участки программного кода для реализации, когда программа программного обеспечения выполняется электронным процессором, способа определения оптимальных траекторий перемещения космических летательных аппаратов, описанного далее.
Настоящее изобретение относится к адаптивному способу с множественной пристрелкой, т.е. алгоритму для решения так называемой "двухточечной краевой задачи", применяемой к траекториям перемещения космических летательных аппаратов. Такой способ, с учетом всех предыдущих усилий для решения задач, касающихся оптимизации пространственной траектории, позволяет вычислять направление тяги, необходимое для согласования с граничными условиями, путем минимизации данного функционала стоимости, согласно данной силовой установке.
Заявитель обратил внимание на то, что вышеописанная расширенная функция стоимости 
Алгоритм согласно настоящему изобретению по-новому использует различные аспекты вышеописанных прямых и косвенных способов, плюс инновационную способность адаптации поиска максимума (или минимума) согласно форме функции стоимости. Алгоритм согласно настоящему изобретению может состоять из широкого семейства алгоритмов непоследовательного факториального поиска, поскольку он содержит оценивание функционала стоимости на основании перебора всевозможных комбинаций данного множества параметров, варьирующихся в надлежащих интервалах. Данное множество параметров представлено начальными значениями множителей Лагранжа, выбранными согласно принципу максимума Понтрягина и условиям трансверсальности. Этот выбор гарантирует, что необходимые условия оптимальности действительно удовлетворяются, иначе было бы невозможно гарантировать, что решение двухточечной краевой задачи оптимально. Такой подход фактически является новым.
Кроме того, начальные области поиска начального множества множителей Лагранжа определяются, исходя из инновационных аналитических соображений, выдвинутых авторами изобретения.
После каждой итерации, то есть после перебора всевозможных комбинаций начальных значений множителей Лагранжа, только одна из них выбирается как выигрышная; другие сохраняются в матрицах совместно с соответствующей функцией стоимости и развитием во времени вектора состояния. Поскольку область поиска можно ограничить путем аналитического рассмотрения, единичная итерация приводит к субоптимальному решению, которое ближе к наилучшему достижимому. Если необходимы дополнительные итерации, предварительно сохраненные данные используются для генерации разложения в ряд вектора состояния, коэффициенты которого зависят только от начального выбора множителей Лагранжа. Налагая данные граничные условия, можно получить новое множество начальных значений, лучше согласующееся с граничными условиями и, в то же время, удовлетворяющее условиям оптимальности. Существует фундаментальное различие между подходом настоящего изобретения и известными прямыми способами, применяемыми в вариационном исчислении. В известных прямых способах коэффициенты вектора состояния разложения в ряд должны удовлетворять условиям оптимальности плюс граничным условиям; коэффициенты разложения в ряд в алгоритме согласно настоящему изобретению должны удовлетворять только граничным условиям, поскольку условия оптимальности, утверждаемые принципом максимума Понтрягина, уже удовлетворены. После отыскания варианта решения область поиска изменяется в размере, и распределение узлов утолщается вокруг такого множества-кандидата. Адаптивность самого алгоритма к изменению размера границ области поиска, соответственно, и способность к саморегулированию распределения узлов вокруг множества-кандидата начальных множителей Лагранжа являются дополнительными инновационными аспектами алгоритма. После небольшого количества итераций получается оптимальное решение.
Для более детального описания настоящего изобретения, фиг. 3 демонстрирует логическую блок-схему способа 10 определения оптимальных траекторий перемещения космических летательных аппаратов согласно предпочтительному варианту осуществления настоящего изобретения.
В частности, как показано на фиг. 3, способ 10 содержит:
- начало (блок 11);
- предоставление физико-математической модели и установление граничных условий (блок 12);
- уменьшение количества степеней свободы (блок 13);
- построение сетки поиска для каждого множителя Лагранжа (блок 14);
- мультифакториальный поиск (блок 15);
- определение приближенного выражения расширенной функции стоимости (блок 16);
- проверка, находится ли найденное решение в пределах допусков (блок 17);
- если найденное решение не находится в пределах допусков (случай, представленный на фиг. 3 первой стрелкой, помеченной словом "НЕТ"), уменьшение интервалов поиска (блок 18); и,
- если найденное решение находится в пределах допусков (случай, представленный на фиг. 3 второй стрелкой, помеченной словом "ДА"), окончание (блок 19).
В дальнейшем вышеперечисленные этапы способа 10 будут подробно описаны на примере межпланетного перемещения Земля-Марс за минимальное время с силовой установкой низкой тяги (т.е. ионным маневровым двигателем), оптимальная траектория которого определяется на основании способа 10.
В частности, что касается предоставления физико-математической модели и установления граничных условий (блок 12), в системе координат xyzO, где ось х направлена к точке весеннего равноденствия, ось y располагается в плоскости эклиптики, и ось z ориентирована так, чтобы образовывать правостороннюю систему координат, дифференциальные уравнения движения принимают следующий вид:
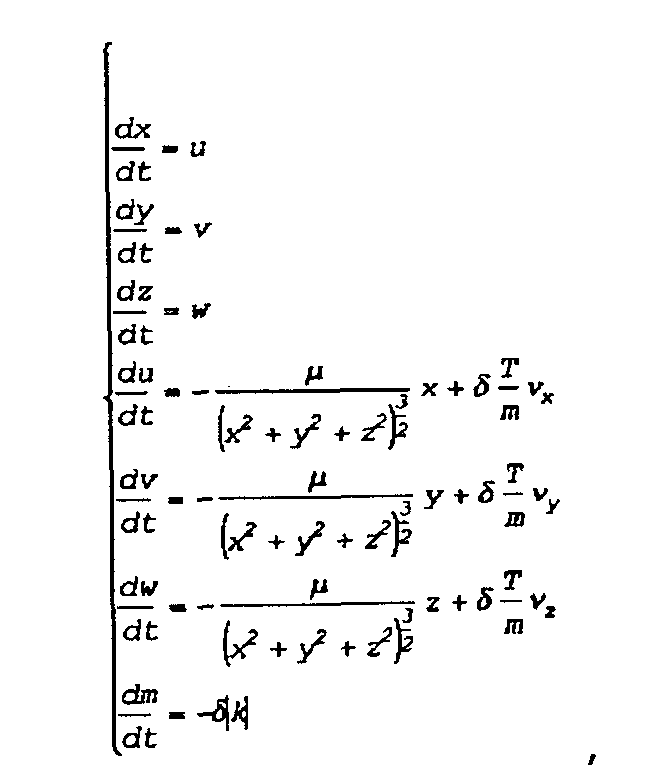
где используемая здесь система обозначений аналогична системе обозначений вышеописанной двухмерной системы уравнений. Что касается граничных условий, предположим, что в момент времени t0 космический летательный аппарат покидает сферу влияния Земли, и в неуказанный момент времени tf он входит в сферу влияния Марса (предполагается, что векторы положения и скорости космического летательного аппарата близки к векторам положения и скорости планет в данной системе координат):
где r={x; y; z} - вектор положения космического летательного аппарата и V={u; v; w} - вектор скорости космического летательного
аппарата.
Что касается начальной эпохи t0, допустим, что нужно найти оптимальное решение в данном интервале начальной эпохи 

Кроме того, что касается уменьшения количества степеней свободы (блок 13), согласно вышесказанному, множество множителей Лагранжа можно, в принципе, искать в ℜ8, но это потребует большого количества времени, прежде чем будет получено удовлетворительное решение. Эффективность алгоритма согласно настоящему изобретению состоит также в выборе начальной области поиска: чем лучше этот выбор, тем меньше времени требуется для схождения алгоритма.
В частности, в дальнейшем будет описано полное руководство по уменьшению области поиска и сложности задачи.
В частности, пусть λr, λv представляют собой векторы
{λх, λy, λz} и {λu, λv, λw} соответственно, и 



Манипулируя выражениями для производных множителей Лагранжа, согласно принципу максимума Понтрягина, можно доказать, что:
Подставляя
получаем:
Это выражение действительно имеет большое значение, поскольку утверждает, что




В частности, соотношение утверждает, что
Аналогично, для перемещения Земля-Луна аналогичное соотношение утверждает, что
Когда величины
Эти четыре угла являются единственными переменными, которые нужно определить, чтобы гарантировать, что граничные условия выполняются, и они не являются истинно независимыми друг от друга, поскольку условия трансверсальности еще надо найти.
Напомним условие трансверсальности:

Важно заметить, что начальная масса космического летательного аппарата является фиксированной, поэтому δm=0. Кроме того, величины изменения δх, δy, δz не являются независимыми друг от друга, но пропорциональны вектору скорости V космического летательного аппарата. Аналогичным образом, величины изменения δu, δv, δw пропорциональны гравитационному ускорению 
так что только два из четырех углов ϕr, ϑr, ϕV, ϑV истинно независимы.
При этом также можно оценить начальное значение λm. Что касается функции Гамильтона, получаем:

тогда как, согласно условиям трансверсальности, должны выполняться условия λr·V=0, λv·f=0, где f - вектор ускорения космического летательного аппарата. Поэтому:
что дает аналитическое значение множителя Лагранжа, связанного с расходом топлива.
Эти соображения позволяют сузить область поиска от ℜ8 до подпространства в ℜ3, где только начальная эпоха и два угла являются истинно независимыми параметрами; кроме того, такое подпространство имеет ограниченный радиус, поскольку диапазон эпохи можно установить через требования миссии и диапазоны углов между [0;2π] (долгота) или 
Определив интервалы поиска, можно выполнить дискретизацию таких интервалов.
Затем, что касается построения сетки поиска для каждого множителя Лагранжа (блок 14), каждый диапазон делится распределением узлов; количество узлов выбирается в соответствии с производительностью компьютера и количеством параметров, подлежащих определению (чем больше количество узлов и параметров, тем больше времени требуется для отыскания локального минимума); количество возможных комбинаций равно N1, где N - количество узлов для каждого распределения и 1 - количество параметров, подлежащих определению. Что касается первой итерации, распределение узлов является эквидистантным ввиду отсутствия информации о макроскопическом тренде функционала (относительно данного параметра).
Фиг. 4 демонстрирует первую сетку поиска, построенную для определения оптимальной траектории перемещения Земля-Марс согласно упомянутому способу 10. На фиг. 4 каждая точка показанной сетки соответствует соответствующей комбинации множителей Лагранжа.
Те же соображения можно, при необходимости, применять для определения оптимальной начальной эпохи: согласно данной силовой установке и массе космического летательного аппарата могут отсутствовать возможности выполнения оптимальной межпланетной миссии в отсутствие правильного выбора взаимного расположения начальной и целевой точек.
Алгоритм ищет субоптимальное, быстродостижимое приближенное решение, интегрируя упрощенную систему уравнений, согласно гипотезе о том, что орбиты Земли и Марса являются копланарными (двухмерное движение):

Это предположение дополнительно уменьшает количество степеней свободы, позволяя быстро установить, существует ли решение.
Далее, что касается мультифакториального поиска (блок 15), функция стоимости оценивается для всевозможных комбинаций начальных значений косостояния; минимальное значение функционала и соответствующая комбинация множителей Лагранжа сохраняются совместно с вектором состояния, полученным в конце прохождения. Эта часть требует наибольшего количества времени согласно количеству узлов в сетке. Обозначим 
Фиг. 5 демонстрирует вторую сетку поиска, построенную для определения оптимальной траектории перемещения Земля-Марс согласно упомянутому способу 10. Белый круг, показанный на фиг. 5, указывает комбинацию углов ϕr, ϑr, претендующую на оптимальность.
Кроме того, что касается определения приближенного выражения расширенной функции стоимости (блок 16), все имитации, выполняемые для определения критической формы функции стоимости, можно применять для построения аналитического выражения приближенной функции стоимости относительно начального множества параметров. Функции, выбранные для приближенного представления, изменяются согласно данной анализируемой задаче. Приближенное выражение функционала стоимости позволяет лучше оценивать оптимальное решение (исходя из того, что новые кандидаты ближе к истинному оптимальному множеству начальных параметров, чем полученные посредством мультифакториального поиска) методами вариационного исчисления.
Наконец, что касается уменьшения интервалов поиска (блок 18), предварительно сохраненные данные используются для уточнения решения. В частности, каждый интервал поиска уменьшается с данным коэффициентом β и центрируется на соответствующем 
Фиг. 6 демонстрирует две сетки поиска, построенные для определения оптимальной траектории перемещения Земля-Марс согласно упомянутому способу 10, где левая сетка поиска является второй сеткой поиска, уже показанной на фиг. 5, а правая сетка поиска является третьей сеткой поиска, построенной при следующем уточнении варианта решения и центрированной вокруг варианта решения.
В частности, на фиг. 6 два белых круга указывают саморегулирование сетки поиска в окрестности варианта решения, полученного согласно упомянутому предпочтительному варианту осуществления настоящего изобретения.
Кроме того, этот метод позволяет учитывать макроскопический тренд функционала относительно данного множителя и перемещаться к эффективному локальному минимуму. Вместо того чтобы рассматривать равномерное распределение узлов, в дальнейшем будет удобнее рассматривать нелинейное распределение с повышенной концентрацией в центральной области каждого интервала, где наиболее вероятно найти локальный минимум функционала. В описанном примере для i-го множителя выбрано параболическое распределение узлов, фактически параболическое распределение узлов сетки вокруг множества приближенных значений является простейшим способом анализа расширенной функции стоимости в области, где наиболее вероятно найти оптимальное множество множителей.
Весь процесс повторяется до тех пор, пока не будут удовлетворены граничные условия в пределах данного допуска и пока не будет достигнуто дополнительное улучшение решения.
Фиг. 7 демонстрирует окончательную оптимальную траекторию Земля-Марс, определенную согласно упомянутому способу 10.
Из вышеизложенного непосредственно следует, что наиболее благоприятные преимущества настоящего изобретения таковы:
1) короткое время, необходимое для схождения к оптимальному решению;
2) если решение невозможно найти (например, если неправильно выбрано стартовое окно или если имеющегося на борту количества топлива маневрового двигателя недостаточно для осуществления перемещения), способ согласно настоящему изобретению позволяет сойтись к решению, наиболее близкому к граничным условиям;
3) отсутствие необходимости ввода со стороны внешнего оператора; и
4) использование уменьшенного множества параметров управления для определения оптимальной траектории перемещения, причем каждый параметр управления является истинно независимым от других, в отличие от известных способов.
В частности, третье преимущество в вышеприведенном перечне представляет значительный шаг вперед по сравнению с известными алгоритмами оптимизации, которые требуют надлежащего начального множества параметров управления для сходимости, поскольку алгоритм согласно настоящему изобретению сам определяет область поиска.
Кроме того, реализованный в программном обеспечении алгоритм согласно настоящему изобретению не нуждается в точной настройке при выполнении.
Все эти признаки в совокупности расширяют сферу применения алгоритма в сторону пертурбативного управления, которое заключается в повторном оценивании в реальном времени (в ходе космической миссии) оптимальных действий управления, которое требуется всякий раз, когда фактическая траектория космического летательного аппарата отклоняется от определенной оптимальной траектории вследствие недетерминированных ускорений.
Кроме того, алгоритм согласно настоящему изобретению позволяет устанавливать, имеет ли решение задача оптимизации, предусматривающая траектории минимального времени, и определять такое решение за ограниченное количество итераций; этот подход можно применять даже к другим видам траектории, с удовлетворительными результатами.
Не было сделано никаких ограничительных предположений, касающихся вектора состояния или функции стоимости (непрерывность, дифференцируемость и т.д.). Алгоритм благодаря своей способности к изменению формы сходится к оптимальным решениям даже в случае резкого изменения функции стоимости в области пространства; с учетом условий, налагаемых принципом максимума Понтрягина, найденное решение предполагается оптимальным.
Еще одно важное преимущество состоит в том, что подход настоящего изобретения позволяет даже неопытному пользователю решать задачу оптимизации, поскольку он не требует знания теоретических концепций, касающихся теории оптимального управления. Поэтому этот алгоритм может использовать почти каждый, в частности, также люди, имеющие ограниченные представления о космической динамике.
Далее представлены некоторые частные варианты осуществления настоящего изобретения.
Вариант 1. Способ определения траектории для перемещения космического летательного аппарата от начального космического тела к целевому космическому телу относительно данного центрального космического тела, причем определенная траектория является оптимальной в отношении того, чтобы перемещение космического летательного аппарата отвечало требованию данной космической миссии, причем способ содержит этапы, на которых
- предоставляют, согласно принципу максимума Понтрягина, физико-математическую модель, связывающую модельные величины и физические величины, представляющие перемещение космического летательного аппарата относительно данного центрального космического тела, причем модельные величины содержат первую векторную величину (λv) модели и вторую векторную величину (λr) модели, причем первая векторная величина (λv) модели имеет первый модуль, изменяющийся во времени, и первую ориентацию в пространстве, которая изменяется во времени и задается первым углом (ϕV) долготы, изменяющимся во времени, и первым углом (ϑV) возвышения, изменяющимся во времени, причем первая векторная величина (λv) модели представляет, момент за моментом, соответствующее оптимальное направление тяги космического летательного аппарата относительно требования данной космической миссии, причем вторая векторная величина (λr) модели имеет второй модуль, изменяющийся во времени, и вторую ориентацию в пространстве, которая изменяется во времени и задается вторым углом (ϕr} долготы, изменяющимся во времени, и вторым углом (ϑr) возвышения, изменяющимся во времени, причем вторая векторная величина (λr) модели представляет, момент за моментом, развитие во времени первой векторной величины (λv) модели,
- устанавливают, в физико-математической модели, начальные и конечные граничные условия, причем начальные граничные условия таковы, что в начальный момент времени (t0) перемещения положение (r) и скорость (V) космического летательного аппарата близки к положению (rЗемли) и скорости (VЗемли), соответственно, начального космического тела, причем конечные граничные условия таковы, что в конечный момент времени (tf) перемещения положение (r) и скорость (V) космического летательного аппарата близки к положению (rМарса) и скорости (VМарса) соответственно целевого космического тела,
- устанавливают, в физико-математической модели, первые условия так, что второй модуль связан с первым модулем через величину, связанную с угловой скоростью, в зависимости от данного центрального космического тела,
- устанавливают, в физико-математической модели, вторые условия так, что конкретный угол долготы между первым углом (ϕv) долготы и вторым углом (ϕr) долготы и конкретный угол возвышения между первым углом (ϑv) возвышения и вторым углом (ϑr) возвышения не зависят друг от друга,
- рассматривают первые начальные моменты времени (t0), включенные в данный временной диапазон, первые значения долготы конкретного угла долготы, включенные в данный диапазон долготы, и первые значения возвышения конкретного угла возвышения, включенные в данный диапазон возвышения, и
- определяют траекторию перемещения космического летательного аппарата на основании физико-математической модели, рассматриваемых первых начальных моментов времени (t0), рассматриваемых первых значений долготы и рассматриваемых первых значений возвышения.
Вариант 2. Способ по варианту 1, в котором определение траектории перемещения космического летательного аппарата на основании физико-математической модели, рассматриваемых первых начальных моментов времени (t0), рассматриваемых первых значений долготы и рассматриваемых первых значений возвышения содержит этапы, на которых:
вычисляют значения данной функции стоимости 

определяют приближенную функцию стоимости на основании вычисленных значений данной функции стоимости
вычисляют значения приближенной функции стоимости на основании рассматриваемых первых начальных моментов времени (t0), рассматриваемых первых значений долготы и рассматриваемых первых значений возвышения,
идентифицируют, среди вычисленных значений приближенной функции стоимости, экстремальное значение приближенной функции стоимости и, среди рассматриваемых первых начальных моментов времени (t0), среди рассматриваемых первых значений долготы и среди рассматриваемых первых значений возвышения, оптимальный начальный момент времени (t0), оптимальное значение долготы и оптимальное значение возвышения соответственно, на основании которых вычислено экстремальное значение приближенной функции стоимости, и
определяют траекторию перемещения космического летательного аппарата на основании физико-математической модели, идентифицированного оптимального начального момента времени (t0), идентифицированного оптимального значения долготы и идентифицированного оптимального значения возвышения.
Вариант 3. Способ по варианту 2, в котором идентифицированное оптимальное значение долготы представляет собой, в физико-математической модели, значение конкретного угла долготы в идентифицированный оптимальный начальный момент времени (t0), и идентифицированное оптимальное значение возвышения представляет собой, в физико-математической модели, значение конкретного угла возвышения в идентифицированный оптимальный начальный момент времени (t0).
Вариант 4. Способ по варианту 2 или варианту 3, в котором физико-математическая модель основана на множителях Лагранжа.
Вариант 5. Способ по любому из вариантов 2-4, в котором определение траектории перемещения космического летательного аппарата на основании физико-математической модели, рассматриваемых первых начальных моментов времени (t0), рассматриваемых первых значений долготы и рассматриваемых первых значений возвышения дополнительно содержит этапы, на которых:
идентифицируют, среди вычисленных значений данной функции стоимости
Вариант 6. Способ по любому из вариантов 2-5, дополнительно содержащий этапы, на которых:
- если траектория, определенная на основании физико-математической модели, рассматриваемых первых начальных моментов времени (t0), рассматриваемых первых значений долготы и рассматриваемых первых значений возвышения, не согласуется с начальными граничными условиями и конечными граничными условиями в пределах предварительно данного допуска, выбирают временной поддиапазон на основании данного временного диапазона и идентифицированного оптимального начального момента времени (t0),
выбирают поддиапазон долготы на основании данного диапазона долготы и идентифицированного оптимального значения долготы,
выбирают поддиапазон возвышения на основании данного диапазона возвышения и идентифицированного оптимального значения возвышения,
рассматривают вторые начальные моменты времени (t0), включенные в выбранный временной поддиапазон, вторые значения долготы конкретного угла долготы, включенные в выбранный поддиапазон долготы, и вторые значения возвышения конкретного угла возвышения, включенные в выбранный поддиапазон возвышения,
определяют траекторию перемещения космического летательного аппарата на основании физико-математической модели, рассматриваемых вторых начальных моментов времени (t0), рассматриваемых вторых значений долготы и рассматриваемых вторых значений возвышения,
причем выбор временного поддиапазона на основании данного временного диапазона и идентифицированного оптимального начального момента времени (t0) содержит этап, на котором:
выбирают временной поддиапазон, который включен в данный временной диапазон, имеет меньшую протяженность, чем протяженность данного временного диапазона, и сцентрирован на идентифицированном оптимальном начальном моменте времени (t0),
причем выбор поддиапазона долготы на основании данного диапазона долготы и идентифицированного оптимального значения долготы содержит этап, на котором:
выбирают поддиапазон долготы, который включен в данный диапазон долготы, имеет меньшую протяженность, чем протяженность данного диапазона долготы, и сцентрирован на идентифицированном оптимальном значении долготы,
причем выбор поддиапазона возвышения на основании данного диапазона возвышения и идентифицированного оптимального значения возвышения содержит этап, на котором:
выбирают поддиапазон возвышения, который включен в данный диапазон возвышения, имеет меньшую протяженность, чем протяженность данного диапазона возвышения, и сцентрирован на идентифицированном оптимальном значении возвышения.
Вариант 7. Способ по варианту 6, в котором рассматриваемые первые начальные моменты времени (t0) однородно распределены в данном временном диапазоне, тогда как большинство рассматриваемых вторых начальных моментов времени (t0) сконцентрировано, в выбранном временном поддиапазоне, вокруг идентифицированного оптимального начального момента времени (t0); причем рассматриваемые первые значения долготы однородно распределены в данном диапазоне долготы, тогда как большинство рассматриваемых вторых значений долготы сконцентрировано, в выбранном поддиапазоне долготы, вокруг идентифицированного оптимального значения долготы; причем рассматриваемые первые значения возвышения однородно распределены в данном диапазоне возвышения, тогда как большинство рассматриваемых вторых значений возвышения сконцентрировано, в выбранном поддиапазоне возвышения, вокруг идентифицированного оптимального значения возвышения.
Вариант 8. Способ по варианту 7, в котором рассматриваемые вторые начальные моменты времени (t0) распределены, в выбранном временном поддиапазоне, согласно первому параболическому распределению, рассматриваемые вторые значения долготы распределены, в выбранном поддиапазоне долготы, согласно второму параболическому распределению, и рассматриваемые вторые значения возвышения распределены, в выбранном поддиапазоне возвышения, согласно третьему параболическому распределению.
Вариант 9. Способ по любому из вариантов 6-8, дополнительно содержащий:
- если траектория, определенная на основании физико-математической модели, рассматриваемых вторых начальных моментов времени (t0), рассматриваемых вторых значений долготы и рассматриваемых вторых значений возвышения, не отвечает начальным граничным условиям и конечным граничным условиям в пределах предварительно заданного допуска, повторение этапов, на которых:
выбирают новый временной поддиапазон на основании предварительно выбранного временного поддиапазона и предварительно идентифицированного оптимального начального момента времени (t0),
выбирают новый поддиапазон долготы на основании предварительно выбранного поддиапазона долготы и предварительно идентифицированного оптимального значения долготы,
выбирают новый поддиапазон возвышения на основании предварительно выбранного поддиапазона возвышения и предварительно идентифицированного оптимального значения возвышения,
рассматривают новые начальные моменты времени (t0), включенные в выбранный новый временной поддиапазон, новые значения долготы конкретного угла долготы, включенные в выбранный новый поддиапазон долготы, и новые значения возвышения конкретного угла возвышения, включенные в выбранный новый поддиапазон возвышения, и
определяют траекторию перемещения космического летательного аппарата на основании физико-математической модели, рассматриваемых новых начальных моментов времени (t0), рассматриваемых новых значений долготы и рассматриваемых новых значений возвышения,
и этап, на котором
- останавливают повторение, если траектория, определенная на основании физико-математической модели, рассматриваемых новых начальных моментов времени (t0), рассматриваемых новых значений долготы и рассматриваемых новых значений возвышения, отвечает начальным граничным условиям и конечным граничным условиям в пределах предварительно заданного допуска.
Вариант 10. Способ по варианту 9, в котором большинство рассматриваемых новых начальных моментов времени (t0) сконцентрировано, в выбранном новом временном поддиапазоне, вокруг предварительно идентифицированного оптимального начального момента времени (t0), большинство рассматриваемых новых значений долготы сконцентрировано, в выбранном новом поддиапазоне долготы, вокруг предварительно идентифицированного оптимального значения долготы, и большинство рассматриваемых новых значений возвышения сконцентрировано, в выбранном новом поддиапазоне возвышения, вокруг предварительно идентифицированного оптимального значения возвышения.
Вариант 11. Способ по варианту 10, в котором рассматриваемые новые вторые начальные моменты времени (t0) распределены, в выбранном новом временном поддиапазоне, согласно четвертому параболическому распределению, рассматриваемые новые значения долготы распределены, в выбранном новом поддиапазоне долготы, согласно пятому параболическому распределению и рассматриваемые новые значения возвышения распределены, в выбранном новом поддиапазоне возвышения, согласно шестому параболическому распределению.
Вариант 12. Способ по любому из вариантов 2-11, в котором приближенную функцию стоимости определяют путем интерполяции вычисленных значений данной функции стоимости
Вариант 13. Способ по любому из вышеуказанных вариантов, в котором модельные величины содержат скалярную величину (λm) модели, связанную с расходом топлива космического летательного аппарата для перемещения.
Вариант 14. Способ по варианту 13, в котором требованием данной космической миссии является минимальное время для перемещения космического летательного аппарата и в котором скалярная величина (λm) модели зависит от производной массы космического летательного аппарата по времени 
Вариант 15. Способ по любому из вышеуказанных вариантов, в котором данным центральным космическим телом является Солнце, начальным космическим телом и целевым космическим телом являются космические тела, орбитально вращающиеся вокруг Солнца, и в котором величина, связанная с угловой скоростью, представляет угловую скорость орбитального вращения вокруг Солнца и зависит от гравитационного параметра (µ) Солнца.
Вариант 16. Способ по любому из вариантов 1-14, в котором данным центральным космическим телом является Земля и в котором величина, связанная с угловой скоростью, представляет угловую скорость орбитального вращения вокруг Земли и зависит от гравитационного параметра Земли.
Вариант 17. Способ по любому из вышеуказанных вариантов, в котором требованием данной космической миссии является минимальный расход топлива космического летательного аппарата для перемещения.
Вариант 18. Программа программного обеспечения, загружаемая в память электронного процессора и содержащая участки кода программного обеспечения для реализации, при выполнении на электронном процессоре, способа по любому из вышеуказанных вариантов.
Вариант 19. Программный продукт программного обеспечения, содержащий компьютерно-читаемый носитель, на котором хранится программа программного обеспечения по варианту 18.
Вариант 20. Электронный процессор, сконфигурированный для реализации способа по любому из вариантов 1-17.
Вариант 21. Космический летательный аппарат, содержащий электронный процессор, сконфигурированный для реализации способа по любому из вариантов 1-17.
Следует понимать, что настоящее изобретение допускает многочисленные модификации и варианты в рамках объема изобретения, заданного в прилагаемой формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ПОСАДКИ КОСМИЧЕСКОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2272757C2 |
| АВИАЦИОННАЯ БОМБА С КОРРЕКТИРУЕМЫМИ АЭРОДИНАМИЧЕСКИМИ ХАРАКТЕРИСТИКАМИ | 2003 |
|
RU2265792C2 |
| СПОСОБ УПРАВЛЕНИЯ СПУСКОМ КОСМИЧЕСКОГО АППАРАТА В АТМОСФЕРЕ ПЛАНЕТЫ | 2013 |
|
RU2537193C1 |
| Способ определения последовательности перелётов между объектами космического мусора при значительном отличии в долготе восходящего узла их орбит | 2018 |
|
RU2688120C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ФОРМИРОВАНИЕМ УРОЖАЯ | 2003 |
|
RU2264703C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА В СРЕДЕ ГЛОБАЛЬНЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 2015 |
|
RU2578671C1 |
| Способ ограничения засорения эксплуатируемых областей околоземного космического пространства | 2017 |
|
RU2665156C1 |
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ СВЕРХЗВУКОВОГО СНАРЯДА | 2005 |
|
RU2408025C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2005 |
|
RU2292289C1 |
| Способ текущего контроля остойчивости судна | 2024 |
|
RU2829030C1 |

Группа изобретений относится к межорбитальным, в т.ч. межпланетным, перелетам космических аппаратов (КА) с реактивным двигателем. Способ построения оптимальной траектории перемещения КА основан на решении двухточечной краевой задачи принципа максимума Понтрягина и учитывает особенности макро- и микроструктуры функции стоимости. В качестве последней могут служить время перелета или расход топлива на перелет. Установлены аналитические основания для эффективного поиска начальных областей значений множителей Лагранжа на каждой итерации. Тем самым облегчено построение последовательности субоптимальных решений задачи, сходящихся к оптимальному. Соответствующий алгоритм дает это последнее либо - при его недостижимости (наличными ресурсами КА) - наиболее близкое к нему. Предложены также электронный процессор для реализации способа и КА с данным процессором. Техническим результатом группы изобретений являются повышение быстродействия, улучшение сходимости, снижение квалификационных требований и расширение сферы применения предложенного алгоритма и сопутствующих средств. 3 н. и 13 з.п. ф-лы, 7 ил.
1. Способ определения траектории для перемещения космического летательного аппарата от начального космического тела к целевому космическому телу относительно данного центрального космического тела, причем определенная траектория является оптимальной в отношении того, чтобы перемещение космического летательного аппарата отвечало требованию данной космической миссии, причем способ содержит этапы, на которых
- предоставляют, согласно принципу максимума Понтрягина, физико-математическую модель, основанную на множителях Лагранжа и связывающую модельные величины и физические величины, представляющие перемещение космического летательного аппарата относительно данного центрального космического тела, причем модельные величины содержат первую векторную величину (λv) модели и вторую векторную величину (λr) модели, причем первая векторная величина (λv) модели имеет первый модуль, изменяющийся во времени, и первую ориентацию в пространстве, которая изменяется во времени и задается первым углом (ϕV) долготы, изменяющимся во времени, и первым углом (ϑV) возвышения, изменяющимся во времени, причем первая векторная величина (λv) модели представляет, момент за моментом, соответствующее оптимальное направление тяги космического летательного аппарата относительно требования данной космической миссии, а вторая векторная величина (λr) модели имеет второй модуль, изменяющийся во времени, и вторую ориентацию в пространстве, которая изменяется во времени и задается вторым углом (ϕr) долготы, изменяющимся во времени, и вторым углом (ϑr) возвышения, изменяющимся во времени, причем вторая векторная величина (λr) модели представляет, момент за моментом, развитие во времени первой векторной величины (λv) модели, при этом модельные величины дополнительно содержат скалярную величину (λm) модели, связанную с расходом топлива космического летательного аппарата для перемещения и связанную с упомянутым первым модулем через производную массы космического летательного аппарата по времени  ,
,
- устанавливают в физико-математической модели начальные и конечные граничные условия, причем начальные граничные условия таковы, что в начальный момент времени (t0) перемещения положение (r) и скорость (V) космического летательного аппарата близки соответственно к положению (rЗемли) и скорости (VЗемли) начального космического тела, а конечные граничные условия таковы, что в конечный момент времени (tf) перемещения положение (r) и скорость (V) космического летательного аппарата близки соответственно к положению (rМарса) и скорости (VМарса) целевого космического тела,
- устанавливают в физико-математической модели первые условия так, что второй модуль связан с первым модулем через величину, связанную с угловой скоростью, в зависимости от данного центрального космического тела,
- устанавливают в физико-математической модели вторые условия так, что конкретный угол долготы между первым углом (ϕv) долготы и вторым углом (ϕr) долготы и конкретный угол возвышения между первым углом (ϑv) возвышения и вторым углом (ϑr) возвышения не зависят друг от друга,
- рассматривают первые начальные моменты времени (t0), включенные в данный временной диапазон, первые значения долготы конкретного угла долготы, включенные в данный диапазон долготы, и первые значения возвышения конкретного угла возвышения, включенные в данный диапазон возвышения, и
- определяют траекторию перемещения космического летательного аппарата на основании физико-математической модели, рассматриваемых первых начальных моментов времени (t0), рассматриваемых первых значений долготы и рассматриваемых первых значений возвышения,
при этом определение траектории перемещения космического летательного аппарата на основании физико-математической модели, рассматриваемых первых начальных моментов времени (t0), рассматриваемых первых значений долготы и рассматриваемых первых значений возвышения - содержит этапы, на которых:
- вычисляют значения данной функции стоимости  , связанной с требованием данной космической миссии, причем значения данной функции стоимости
, связанной с требованием данной космической миссии, причем значения данной функции стоимости  вычисляются на основании рассматриваемых первых начальных моментов времени, рассматриваемых первых значений долготы и рассматриваемых первых значений возвышения,
вычисляются на основании рассматриваемых первых начальных моментов времени, рассматриваемых первых значений долготы и рассматриваемых первых значений возвышения,
- определяют приближенную функцию стоимости на основании вычисленных значений данной функции стоимости ,
- вычисляют значения приближенной функции стоимости на основании рассматриваемых первых начальных моментов времени (t0), рассматриваемых первых значений долготы и рассматриваемых первых значений возвышения,
- идентифицируют среди вычисленных значений приближенной функции стоимости экстремальное значение приближенной функции стоимости и среди рассматриваемых первых начальных моментов времени (t0), среди рассматриваемых первых значений долготы и среди рассматриваемых первых значений возвышения - соответственно, оптимальный начальный момент времени (t0), оптимальное значение долготы и оптимальное значение возвышения, на основании которых вычислено экстремальное значение приближенной функции стоимости, и
- определяют траекторию перемещения космического летательного аппарата на основании физико-математической модели, идентифицированного оптимального начального момента времени (t0), идентифицированного оптимального значения долготы и идентифицированного оптимального значения возвышения.
2. Способ по п. 1, в котором идентифицированное оптимальное значение долготы представляет собой в физико-математической модели значение конкретного угла долготы в идентифицированный оптимальный начальный момент времени (t0), а идентифицированное оптимальное значение возвышения представляет собой в физико-математической модели значение конкретного угла возвышения в идентифицированный оптимальный начальный момент времени (t0).
3. Способ по п. 1, в котором определение траектории перемещения космического летательного аппарата на основании физико-математической модели, рассматриваемых первых начальных моментов времени (t0), рассматриваемых первых значений долготы и рассматриваемых первых значений возвышения - дополнительно содержит этапы, на которых идентифицируют среди вычисленных значений данной функции стоимости экстремальное значение данной функции стоимости и среди рассматриваемых первых начальных моментов времени (t0), среди рассматриваемых первых значений долготы и среди рассматриваемых первых значений возвышения - соответственно, субоптимальный начальный момент времени (t0), субоптимальное значение долготы и субоптимальное значение возвышения, на основании которых вычислено экстремальное значение данной функции стоимости .
4. Способ по п. 1, дополнительно содержащий этапы, на которых в случае, если траектория, определенная на основании физико-математической модели, рассматриваемых первых начальных моментов времени (t0), рассматриваемых первых значений долготы и рассматриваемых первых значений возвышения, не согласуется с начальными граничными условиями и конечными граничными условиями в пределах предварительно данного допуска
- выбирают временной поддиапазон на основании данного временного диапазона и идентифицированного оптимального начального момента времени (t0),
- выбирают поддиапазон долготы на основании данного диапазона долготы и идентифицированного оптимального значения долготы,
- выбирают поддиапазон возвышения на основании данного диапазона возвышения и идентифицированного оптимального значения возвышения,
- рассматривают вторые начальные моменты времени (t0), включенные в выбранный временной поддиапазон, вторые значения долготы конкретного угла долготы, включенные в выбранный поддиапазон долготы, и вторые значения возвышения конкретного угла возвышения, включенные в выбранный поддиапазон возвышения,
- определяют траекторию перемещения космического летательного аппарата на основании физико-математической модели, рассматриваемых вторых начальных моментов времени (t0), рассматриваемых вторых значений долготы и рассматриваемых вторых значений возвышения, причем
- выбор временного поддиапазона на основании данного временного диапазона и идентифицированного оптимального начального момента времени (t0) содержит этап, на котором выбирают временной поддиапазон, который включен в данный временной диапазон, имеет меньшую протяженность, чем протяженность данного временного диапазона, и сцентрирован на идентифицированном оптимальном начальном моменте времени (t0),
- выбор поддиапазона долготы на основании данного диапазона долготы и идентифицированного оптимального значения долготы содержит этап, на котором выбирают поддиапазон долготы, который включен в данный диапазон долготы, имеет меньшую протяженность, чем протяженность данного диапазона долготы, и сцентрирован на идентифицированном оптимальном значении долготы,
- выбор поддиапазона возвышения на основании данного диапазона возвышения и идентифицированного оптимального значения возвышения содержит этап, на котором выбирают поддиапазон возвышения, который включен в данный диапазон возвышения, имеет меньшую протяженность, чем протяженность данного диапазона возвышения, и сцентрирован на идентифицированном оптимальном значении возвышения.
5. Способ по п. 4, в котором рассматриваемые первые начальные моменты времени (t0) однородно распределены в данном временном диапазоне, тогда как большинство рассматриваемых вторых начальных моментов времени (t0) сконцентрировано в выбранном временном поддиапазоне вокруг идентифицированного оптимального начального момента времени (t0), рассматриваемые первые значения долготы однородно распределены в данном диапазоне долготы, тогда как большинство рассматриваемых вторых значений долготы сконцентрировано в выбранном поддиапазоне долготы вокруг идентифицированного оптимального значения долготы, рассматриваемые первые значения возвышения однородно распределены в данном диапазоне возвышения, тогда как большинство рассматриваемых вторых значений возвышения сконцентрировано в выбранном поддиапазоне возвышения вокруг идентифицированного оптимального значения возвышения.
6. Способ по п. 5, в котором рассматриваемые вторые начальные моменты времени (t0) распределены в выбранном временном поддиапазоне согласно первому параболическому распределению, рассматриваемые вторые значения долготы распределены в выбранном поддиапазоне долготы согласно второму параболическому распределению, а рассматриваемые вторые значения возвышения распределены в выбранном поддиапазоне возвышения согласно третьему параболическому распределению.
7. Способ по п. 4, дополнительно содержащий в случае, если траектория, определенная на основании физико-математической модели, рассматриваемых вторых начальных моментов времени (t0), рассматриваемых вторых значений долготы и рассматриваемых вторых значений возвышения - не отвечает начальным граничным условиям и конечным граничным условиям в пределах предварительно заданного допуска, повторение этапов, на которых
- выбирают новый временной поддиапазон на основании предварительно выбранного временного поддиапазона и предварительно идентифицированного оптимального начального момента времени (t0),
- выбирают новый поддиапазон долготы на основании предварительно выбранного поддиапазона долготы и предварительно идентифицированного оптимального значения долготы,
- выбирают новый поддиапазон возвышения на основании предварительно выбранного поддиапазона возвышения и предварительно идентифицированного оптимального значения возвышения,
- рассматривают новые начальные моменты времени (t0), включенные в выбранный новый временной поддиапазон, новые значения долготы конкретного угла долготы, включенные в выбранный новый поддиапазон долготы, и новые значения возвышения конкретного угла возвышения, включенные в выбранный новый поддиапазон возвышения, и
- определяют траекторию перемещения космического летательного аппарата на основании физико-математической модели, рассматриваемых новых начальных моментов времени (t0), рассматриваемых новых значений долготы и рассматриваемых новых значений возвышения, причем
останавливают повторение на этапе, когда траектория, определенная на основании физико-математической модели, рассматриваемых новых начальных моментов времени (t0), рассматриваемых новых значений долготы и рассматриваемых новых значений возвышения, отвечает начальным граничным условиям и конечным граничным условиям в пределах предварительно заданного допуска.
8. Способ по п. 7, в котором большинство рассматриваемых новых начальных моментов времени (t0) сконцентрировано в выбранном новом временном поддиапазоне вокруг предварительно идентифицированного оптимального начального момента времени (t0), большинство рассматриваемых новых значений долготы сконцентрировано в выбранном новом поддиапазоне долготы вокруг предварительно идентифицированного оптимального значения долготы, и большинство рассматриваемых новых значений возвышения сконцентрировано в выбранном новом поддиапазоне возвышения вокруг предварительно идентифицированного оптимального значения возвышения.
9. Способ по п. 8, в котором рассматриваемые новые вторые начальные моменты времени (t0) распределены в выбранном новом временном поддиапазоне согласно четвертому параболическому распределению, рассматриваемые новые значения долготы распределены в выбранном новом поддиапазоне долготы согласно пятому параболическому распределению и рассматриваемые новые значения возвышения распределены в выбранном новом поддиапазоне возвышения согласно шестому параболическому распределению.
10. Способ по п. 1, в котором приближенную функцию стоимости определяют путем интерполяции вычисленных значений данной функции стоимости .
11. Способ по п. 1, в котором требованием данной космической миссии является минимальное время для перемещения космического летательного аппарата.
12. Способ по п. 1, в котором данным центральным космическим телом является Солнце, начальным космическим телом и целевым космическим телом являются космические тела, обращающиеся вокруг Солнца, и в котором величина, связанная с угловой скоростью, представляет угловую скорость обращения вокруг Солнца и зависит от гравитационного параметра (µ) Солнца.
13. Способ по п. 1, в котором данным центральным космическим телом является Земля и в котором величина, связанная с угловой скоростью, представляет угловую скорость обращения вокруг Земли и зависит от гравитационного параметра Земли.
14. Способ по п. 1, в котором требованием данной космической миссии является минимальный расход топлива космического летательного аппарата для перемещения.
15. Электронный процессор, сконфигурированный для реализации способа по любому из пп. 1-14.
16. Космический летательный аппарат, содержащий электронный процессор, сконфигурированный для реализации способа по любому из пп. 1-14.
| П | |||
| ЭСКОБАЛ | |||
| Методы астродинамики | |||
| "Мир" | |||
| М., 1971, с.115-123 | |||
| C.А.ГОРБАТЕНКО, Э.М.МАКАШОВ и др | |||
| Расчет и анализ движения летательных аппаратов | |||
| Инженерный справочник | |||
| "Машиностроение" | |||
| М., 1971, c.169-171, 194-210, 332-338 | |||
| Инженерный справочник по космической технике | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Под ред | |||
| А.В.СОЛОДОВА | |||
| Воениздат | |||
| Шеститрубный элемент пароперегревателя в жаровых трубках | 1918 |
|
SU1977A1 |
| Ц.В.СОЛОВЬЕВ, | |||

